Ohne Roboter ist die Science-Fiction-Welt der Zukunft nicht vorstellbar. Ob Androiden aus dem Alien-Universum, anthropomorphe Robotermaschinen von Transformers, ein Roboterhund namens Axel oder ein riesiger Roboterkiller ED-209 im Film Robocop, der für viele Zuschauer wie ein Huhn aussah. Aber was haben sie gemeinsam? Neben Kraft, Geschwindigkeit, Ausdauer und anderen sozusagen körperlichen Merkmalen? Intelligenz. Und was ist Intelligenz? Die Fähigkeit zu denken, Daten zu analysieren und Entscheidungen zu treffen, wenn wir auf den Punkt gebracht übertrieben sprechen. Heute werden wir den weltweit ersten modularen Roboter kennenlernen, der in der Lage ist, die Situation vor Ort zu analysieren, und der zur Erfüllung dieser Aufgabe umgebaut wird. Wie haben Wissenschaftler es geschafft, dem Roboter beizubringen, schnell zu denken und die richtigen Entscheidungen zu treffen, wie funktioniert dieser Roboter und wie gut? Die Forschungsgruppe beschreibt dies alles in ihrem Bericht, in den wir eintauchen werden. Lass uns gehen.
StiftungsbasisZunächst sollten Sie ein wenig darüber sprechen, wie der getestete Roboter aussieht. Es ist nicht ganz gewöhnlich, seine Konstruktionsmerkmale werden im Namen selbst offenbart - ein modularer selbstrekonfigurierbarer Roboter (MSRR). Das Wort "Roboter" ist uns allen klar. Lassen Sie uns herausfinden, was die ersten beiden bedeuten. Modular: Dieser Roboter besteht aus Modulen, die im Wesentlichen unabhängige Roboter sind. Durch die Kombination dieser Module erhalten Sie ein Design von beliebiger Komplexität (praktisch), abhängig von der erforderlichen Aufgabe. Das heißt, einzelne Mini-Roboter (Module) können einige Aufgaben leicht selbst ausführen und für komplexere Aufgaben kommen sie zusammen, wie mächtige Ranger in Megazord (die Kinder der 90er werden verstehen, was für einen Unsinn ich gerade geschrieben habe :) )
 Das Aussehen eines modularen Roboters.
Das Aussehen eines modularen Roboters.Die Forscher stellen fest, dass zuvor Studien auf dem Gebiet der modularen Roboter durchgeführt wurden, die einige Probleme lösen können. Bisher konnten solche Roboter jedoch entweder einfache oder komplexe Aufgaben lösen, deren Lösungen bereits von Menschen in sie programmiert wurden. Tatsächlich haben sie keine eigenen Entscheidungen getroffen und die Situation und die Komplexität bewertet, die zur Erfüllung der Aufgabe erforderlich sind.
Die Wissenschaftler führten eine Reihe von Tests durch, von denen sich jeder vom vorherigen unterschied. Der Roboter hingegen musste eine bestimmte Aufgabe (eine etwas später) ausführen, indem er sie unter der neuen Umgebung neu aufbaute. Einen doppelten Schaffellmantel hat ihn natürlich niemand gebeten, aber die Ergebnisse haben die Wissenschaftler immer noch verblüfft. Und jetzt werden wir sie kennenlernen.
Testen Sie "Megazord"Die Tests des Roboters erfolgten in drei Schritten, von denen jeder seine eigene Aufgabe hatte. Die Tests wurden in einem Raum durchgeführt, in dem die „Arbeitsumgebung“ des Roboters mithilfe von Boxen gebildet wurde, die von den Forschern in jeder Phase geändert wurden. Stellen Sie sich ein Labyrinth vor, das sich jedes Mal ändert, wenn Sie es betreten. Der Roboter war ursprünglich nicht für jede neue Umgebung programmiert, für ihn war es eine völlig neue Umgebung. Das einzige, was der Roboter sicher wusste, waren ihre Fähigkeiten. Dies ist zunächst eine Bewertung der Umgebung, dann wählt der Roboter aus der Bibliothek seine Fähigkeiten aus, die am effektivsten zur Aufgabe beitragen.
Wie ich bereits sagte, gab es nur drei Testphasen mit unterschiedlichen Aufgaben und Umgebungen:
- Erkunden Sie die Umgebung, suchen Sie alle rosa / grünen Objekte und die blaue Markierung und verschieben Sie die Objekte zum Rücksetzpunkt.
- Erkunden Sie die Umgebung, suchen Sie die Mailbox und legen Sie das Steckbrett in die Box.
- Erkunden Sie die Umgebung, finden Sie das Paket und kleben Sie einen Stempel darauf.
Die Aufgaben scheinen ziemlich einfach zu sein, aber das ist für uns. Wir gingen ins Zimmer, sahen uns um, fanden alles, was wir brauchten und bereit. Vergleichen Sie jedoch nicht einen der komplexesten Computer der Welt (unser Gehirn) und einen kleinen Roboter.
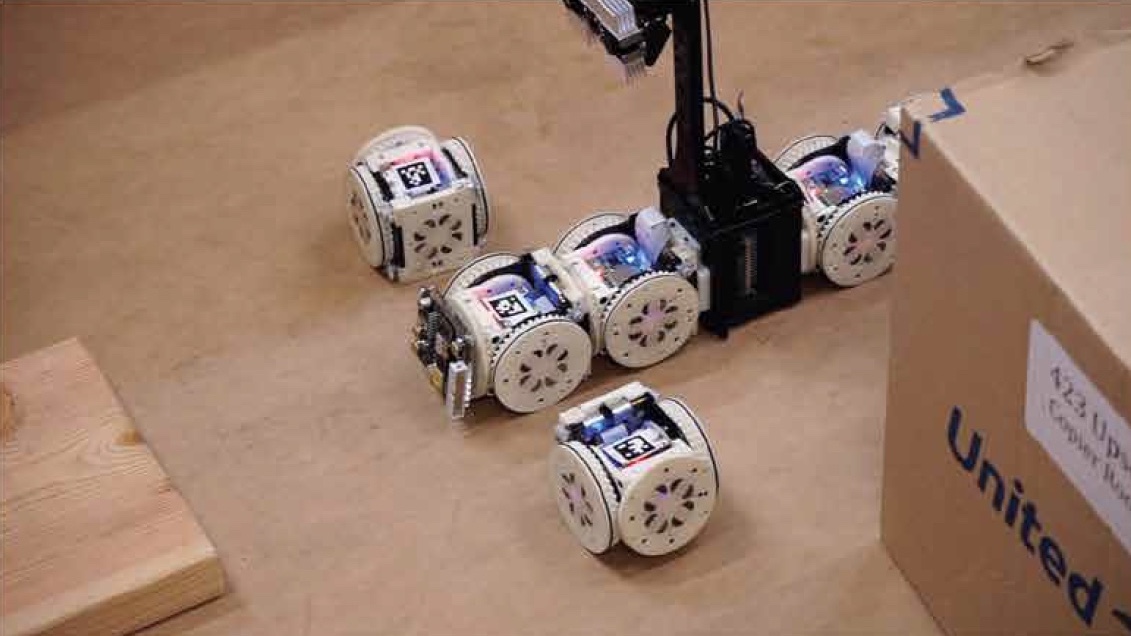
In der ersten Phase wurde der Roboter beauftragt, zwei Objekte - „Metallmüll“, rosa und grün markiert - zu entnehmen und zum „Recycling“ an die Entladestelle zu bringen. Der Rücksetzpunkt wurde mit einem blauen Quadrat an der Wand markiert.
Die Aufgabe ist eingestellt, die Arbeitsumgebung ist bereit, der Roboter läuft. Als erstes scannt er den Raum und erstellt eine dreidimensionale Karte, nach der er in Zukunft geführt wird.
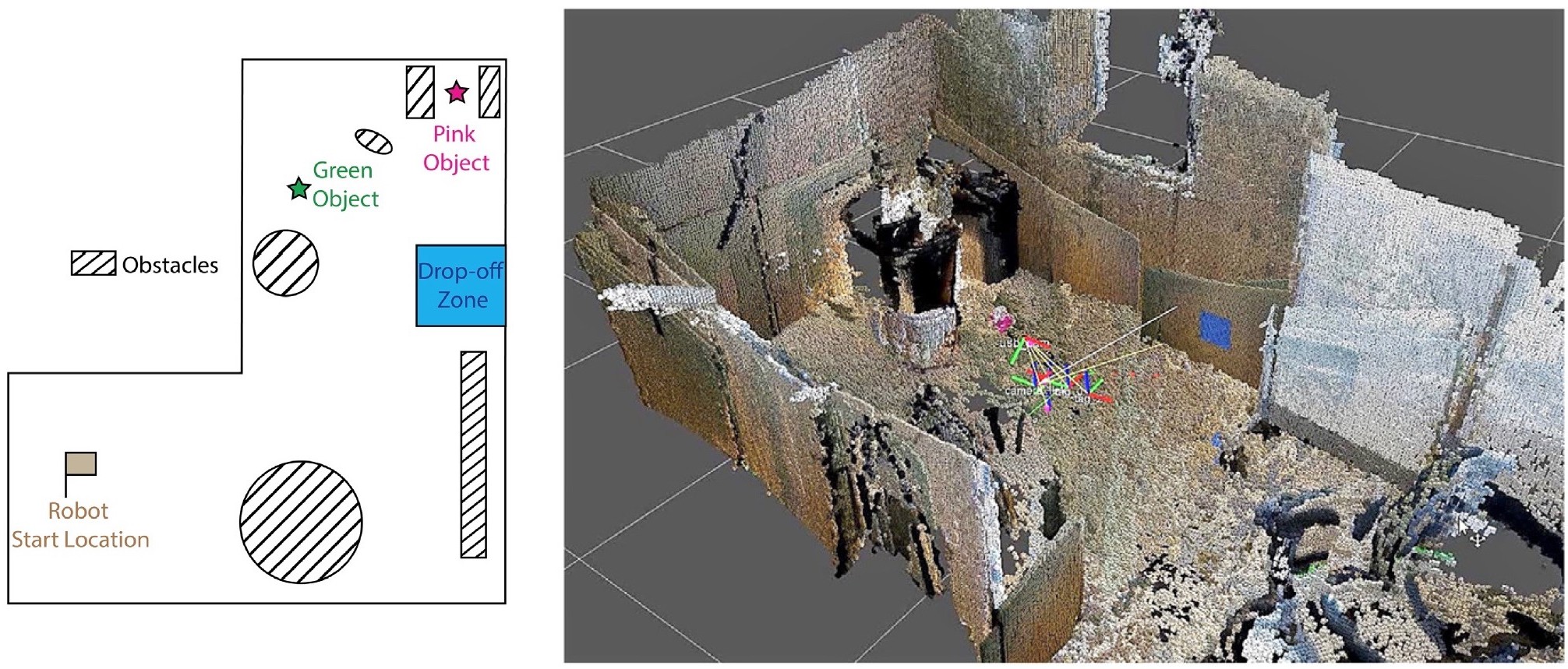 Das Schema der Testzone der ersten Stufe (links) und eine dreidimensionale Karte der Arbeitsumgebung des modularen Roboters (rechts).
Das Schema der Testzone der ersten Stufe (links) und eine dreidimensionale Karte der Arbeitsumgebung des modularen Roboters (rechts).Betrachten Sie die Aktionen des Roboters als Beispiel für die erste Testphase, deren Details Sie in der Abbildung und im Bild oben sehen.
Die grüne Markierung im Diagramm ist die Position einer normalen Getränkedose, zu der der Zugang nicht gesperrt ist. Die rosa Markierung ist eine Drahtspule, die sich in einem engen Raum zwischen zwei Mülleimern befindet. Außerdem befanden sich in der gesamten Region verschiedene Hindernisse.
Zunächst wählte der Roboter die am besten geeignete Form für die Bewegung - das "Auto". Nachdem der Roboter ein rosa Objekt entdeckt hatte, analysierte er seine Position und kam zu dem Schluss, dass eine solche Form ihm nicht die Möglichkeit geben würde, das Objekt zu erhalten. Daher wurde er in Form eines "Kofferraums" umgebaut und ein Objekt herausgezogen. Der Roboter kehrte zur Form der Maschine zurück, nahm das Objekt und trug es zum Rücksetzpunkt, dessen Position er dank Scannen und Erstellen einer Karte bereits kennt.
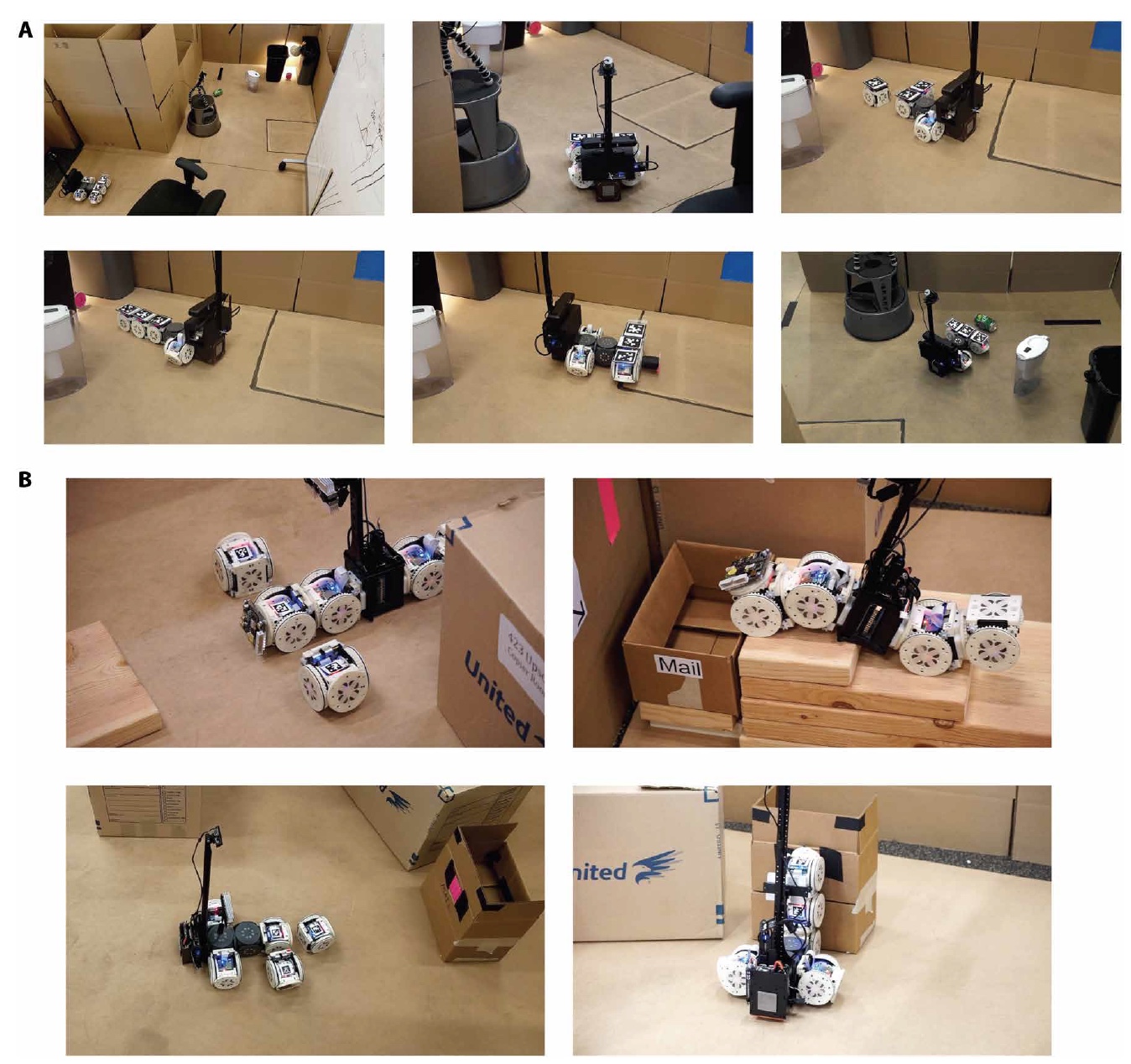 A - die erste Stufe (von links nach rechts: Ansicht der Arbeitsumgebung, Scannen der Umgebung, Neukonfiguration des Roboters, Erfassen eines rosa Objekts, Bewegen eines Objekts, Erfassen eines grünen Objekts); B - die zweite Stufe (obere 2 Bilder) und die dritte Stufe (untere 2 Bilder).
A - die erste Stufe (von links nach rechts: Ansicht der Arbeitsumgebung, Scannen der Umgebung, Neukonfiguration des Roboters, Erfassen eines rosa Objekts, Bewegen eines Objekts, Erfassen eines grünen Objekts); B - die zweite Stufe (obere 2 Bilder) und die dritte Stufe (untere 2 Bilder).In der zweiten Phase war die Umgebung bereits anders, da die bisherige Taktik des Roboters nicht mehr effektiv sein würde. In den Bildern oben sehen wir, dass der Roboter eine "Schlangen" -Form angenommen hat, um die Treppe zu erklimmen und das Objekt im Briefkasten zu lassen. Das heißt, der Roboter, der die Situation bewertete, erkannte, dass das Vorhandensein bestimmter Module nicht nur überflüssig wäre, sondern auch zum Ausfall führen könnte, und trennte sie daher.
In der dritten Phase hatte der Roboter Probleme, das Ziel zu finden (Markierung, wo er die Briefmarke platzieren sollte), aber nach ein paar Minuten konnte er es erkennen. Die Markierung befindet sich in einer Höhe von 25 cm über dem Boden, da die Erstkonfiguration des Roboters ("Maschine") nicht wirksam ist. Der Roboter wurde in vertikaler Konfiguration umgebaut und mit einem Stempel versehen.
Puzzle Roboter RezeptWie wir bereits verstanden haben, besteht unser Megazord aus mehreren kleinen Robotermodulen, die verschiedene Bewegungen selbst ausführen können, was dem großen Roboter den Vorteil der Mobilität und natürlich die Möglichkeit zur Neukonfiguration bietet.
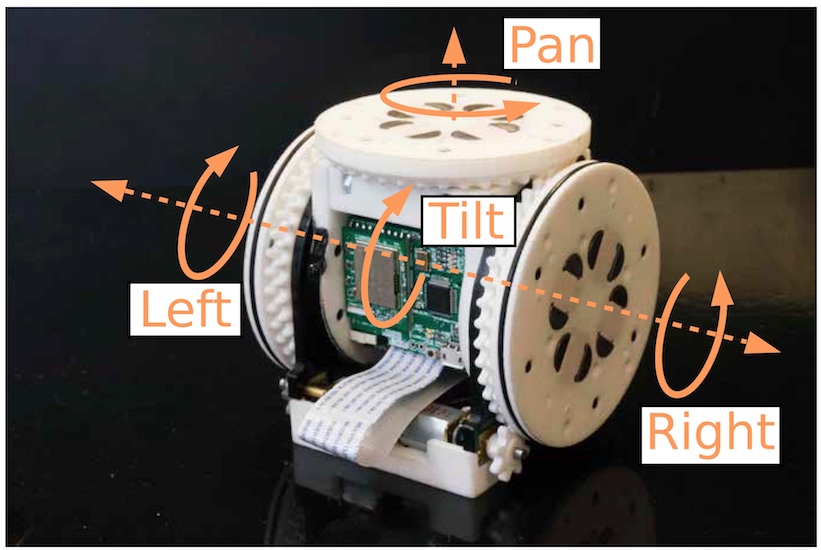 Das Aussehen des Moduls. Die Pfeile zeigen, wie das Modul seine Position ändern kann (horizontale und vertikale Drehungen und Neigungen).
Das Aussehen des Moduls. Die Pfeile zeigen, wie das Modul seine Position ändern kann (horizontale und vertikale Drehungen und Neigungen).Jedes Modul (jede Würfelfläche ist 80 mm groß) ist mit elektro-permanenten Magneten ausgestattet, mit denen die Module unabhängig von der Seite der Verbindung miteinander verbunden werden können. Mit diesem Magneten können Sie auch ferromagnetische Objekte anbringen (z. B. zum Entladepunkt transportieren oder den Weg für den Roboter freimachen). Jedes einzelne Modul ist außerdem mit einem eigenen Akku (ca. 1 Stunde), einem Mikrocontroller und einem Wi-Fi-Chip ausgestattet. Alle Module wurden drahtlos von einem zentralen Computer gesteuert, und ein gewöhnlicher Haushaltsrouter wurde verwendet, um eine Wi-Fi-Umgebung bereitzustellen.
 Aussehen des Hauptteils des Roboters (Kamera, Ständer, RGB-D-Kamera und Basis).
Aussehen des Hauptteils des Roboters (Kamera, Ständer, RGB-D-Kamera und Basis).Die Basis der Roboterbasis ist eine kleine Box (90 x 70 x 70 mm) aus dünnen Metallplatten, mit der die Module durch Magnetismus mit der Basis verbunden werden können. Rechenprozesse wurden mit einem Intel Atom 1,92-GHz-Prozessor, 4 GB RAM und 64 GB Speicher durchgeführt. Außerdem wurde ein USB-WLAN-Adapter in der Basis montiert.
Der wichtigste Schritt bei der Umsetzung der Aufgabe ist ihr Verständnis. Diese Regel gilt sowohl für Menschen als auch für kleine, intelligente Roboter. Um zu verstehen, was und wie zu tun ist, scannt der Roboter die Umgebung. Dies erfolgt über eine RGB-D-Kamera.
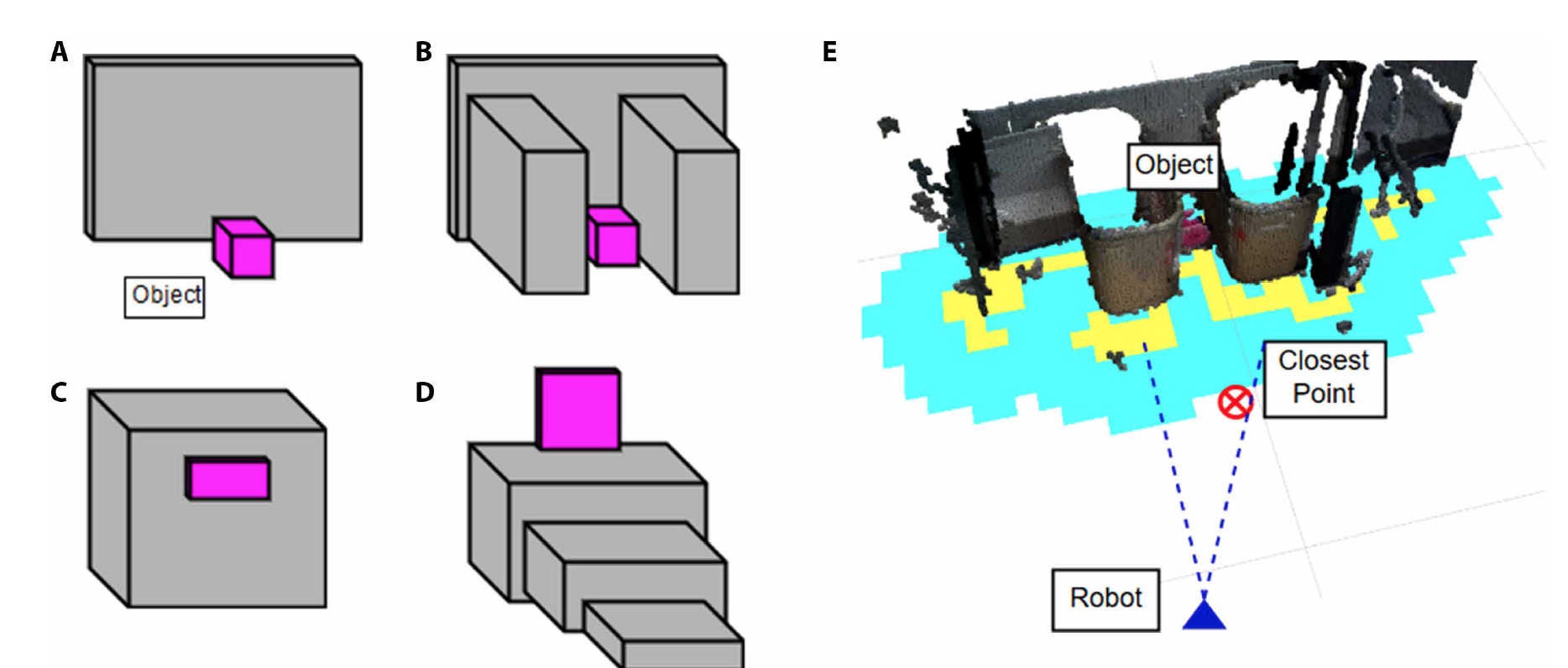 Die Position von Objekten von Interesse ( A , B ist die erste Stufe, C ist die zweite und D ist die dritte) sowie ein Beispiel dafür, wie der Roboter während des Tests mit einem Objekt in einer engen Öffnung ( E ) „sieht“.
Die Position von Objekten von Interesse ( A , B ist die erste Stufe, C ist die zweite und D ist die dritte) sowie ein Beispiel dafür, wie der Roboter während des Tests mit einem Objekt in einer engen Öffnung ( E ) „sieht“.Wenn das Scansystem das erforderliche Objekt erkennt, wird die Funktion zum Charakterisieren von Informationen aktiviert, die aus einer dreidimensionalen Karte der Umgebung erhalten werden. Auf diese Weise wird ein Raumgitter gebildet, auf dem für den Roboter unzugängliche Bereiche gelb markiert sind. Als nächstes findet das System den nächstgelegenen Zugangspunkt zum Objekt (in einem Winkel von 20 ° zum Roboter selbst). Wenn der Abstand von diesem Punkt zum Objekt größer als der Grenzwert ist und sich das Objekt auf dem Boden befindet, stellt das System fest, dass sich das Objekt in der Öffnung befindet. Wenn das Objekt vom System in einer Position über dem Boden definiert wird, wertet es dies als Schritte aus. Wenn der Wert des Abstands vom Punkt zum Objekt niedriger als der Grenzindikator ist, entscheidet sich das System für die Konfiguration „frei“ (dh das Original) oder „hoch“ (zum Anheben auf eine bestimmte Höhe).
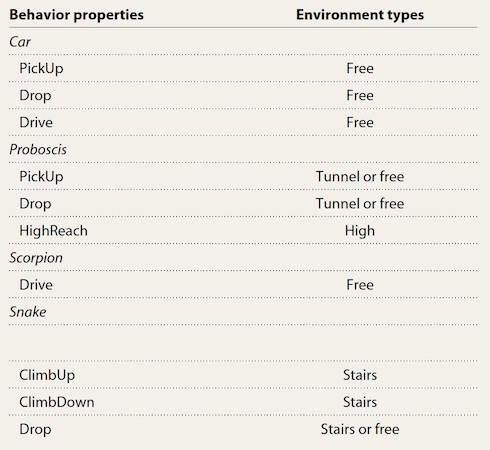 Tabelle der Roboterkonfigurationen und wofür sie verwendet werden.
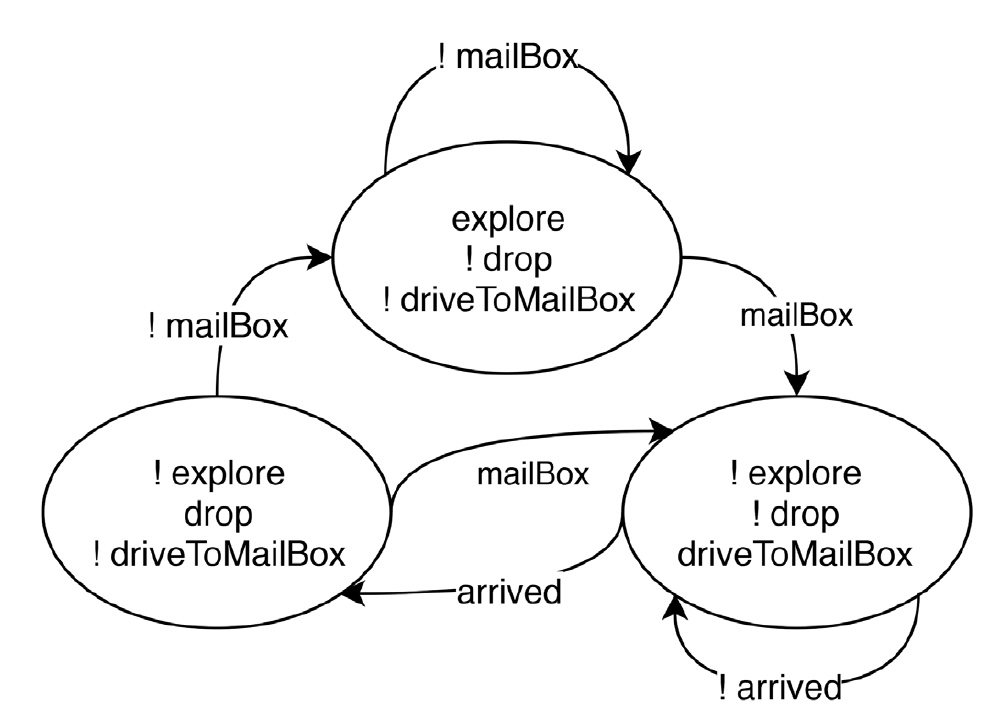
Tabelle der Roboterkonfigurationen und wofür sie verwendet werden.Die Spezifikation der Roboteraufgabe ist recht einfach. Betrachten Sie ein Beispiel mit einer Mailbox:
- Führen Sie „Nachforschungen“ nur dann durch, wenn der Roboter die Mailbox nicht sieht.
- Führen Sie genau dann eine „Bewegung zur Box“ durch, wenn der Roboter die Box sieht und sie noch nicht erreicht hat.
- Führen Sie einen „Reset“ (eines Objekts in einer Box) nur dann durch, wenn der Roboter die Box sieht und dort ankommt.
Schematisch kann dies wie folgt dargestellt werden (Aktionen, die mit den Werten „true“ und „false“ gekennzeichnet sind, werden je nach Variante mit einem „!“ Markiert):
Der Prozess der Änderung der Konfiguration beginnt mit der Tatsache, dass das System die Notwendigkeit für diesen Prozess bestimmt. Wenn es eine gibt, erkennt eine nach unten gerichtete Kamera einen Abschnitt von 0,75 mx 0,5 m, in dem der Rekonfigurationsprozess erfolgreich und ohne Störung durch einige Objekte sein kann. Der Controller bestimmt die Anfangs- und Endkonfiguration und sendet anschließend ein Signal an Module mit dem AprilTag-Label (es sieht aus wie ein QR-Code). Die Module erhalten den Befehl zum Trennen, Bewegen an die gewünschte Position und Verbinden in einer neuen Konfiguration.
Dieses Video zeigt den gesamten Testprozess des Roboters, vom Scannen des Mediums bis zur Erledigung der Aufgabe.Das merkwürdigste Element dieses Robotertransformators ist immer noch nicht die Fähigkeit, die Konfiguration der Module zu ändern, sondern die Fähigkeit, unabhängig zu entscheiden, wie sie geändert werden soll, um sie an die Umstände anzupassen.
Die Systemarchitektur verwendet ein Framework, mit dem jeder Benutzer unter Verwendung des gängigsten Vokabulars eine Aufgabe für den Roboter festlegen und eine zentrale Steuerung bilden kann, die wiederum die Module abhängig von der Aufgabenausführungsumgebung steuert. Die Grundlage all dessen ist LTLMoP (Linear Temporal Logic MissiOn Planning), mit dem Sie Controller basierend auf vom Benutzer bereitgestellten allgemeinen Anweisungen erstellen können.
Für eine detailliertere Kenntnis der Studie empfehle ich den
Bericht der Forscher und
zusätzliche Materialien .
NachwortDieses System ist sehr interessant, wenn auch nicht ohne Nachteile. So weist der Benutzer den Roboter beispielsweise an, das Objekt in der Mailbox zu platzieren, das Objekt jedoch nicht fallen zu lassen, bis die Mailbox erkannt wird. Mit anderen Worten, der Roboter kann es nicht einfach mit den Worten "Fick es, ich höre auf!" Unterbrechen Sie die Aufgabe. Wenn der Roboter die Box nicht erkennt, fordert das System den Benutzer gleichzeitig auf, Klärungsdaten einzugeben. Es stellt sich heraus, dass der Roboter nicht so unabhängig ist? Nein, das ist natürlich nicht der T-1000, aber die ersten Schritte dazu sind bereits da. Schließlich entscheidet der Roboter selbst, welche der ihm zur Verfügung stehenden Konfigurationen für die Aufgabe am besten geeignet ist. Es ist unmöglich, dies einen Denkprozess zu nennen, hier ist alles recht einfach und linear.
Selbst wenn dieser kleine Transformator die Hilfe einer Person benötigt, kann er dennoch eine Entscheidung treffen. Hoffen wir, dass wir derzeit die Entstehung des zukünftigen Ultron nicht beobachten. :) :)
Freitag offtopic (alle haben ein gutes Wochenende):
Video für diejenigen, die sich nicht entscheiden können, wen er am liebsten mag: coole Samurai oder coole Roboter.
Und das zweite offtopic (sorry, konnte nicht widerstehen) für Musikliebhaber.
Vielen Dank für Ihren Aufenthalt bei uns. Gefällt dir unser Artikel? Möchten Sie weitere interessante Materialien sehen? Unterstützen Sie uns, indem Sie eine Bestellung
aufgeben oder Ihren Freunden empfehlen, einen
Rabatt von 30% für Habr-Benutzer auf ein einzigartiges Analogon von Einstiegsservern, das wir für Sie erfunden haben: Die ganze Wahrheit über VPS (KVM) E5-2650 v4 (6 Kerne) 10 GB DDR4 240 GB SSD 1 Gbit / s von $ 20 oder wie teilt man den Server? (Optionen sind mit RAID1 und RAID10, bis zu 24 Kernen und bis zu 40 GB DDR4 verfügbar).
VPS (KVM) E5-2650 v4 (6 Kerne) 10 GB DDR4 240 GB SSD 1 Gbit / s bis Dezember kostenlos, wenn Sie für einen Zeitraum von sechs Monaten bezahlen, können Sie
hier bestellen.
Dell R730xd 2 mal günstiger? Nur wir haben
2 x Intel Dodeca-Core Xeon E5-2650v4 128 GB DDR4 6 x 480 GB SSD 1 Gbit / s 100 TV von 249 US-Dollar in den Niederlanden und den USA! Lesen Sie mehr über
den Aufbau eines Infrastrukturgebäudes. Klasse mit Dell R730xd E5-2650 v4 Servern für 9.000 Euro für einen Cent?