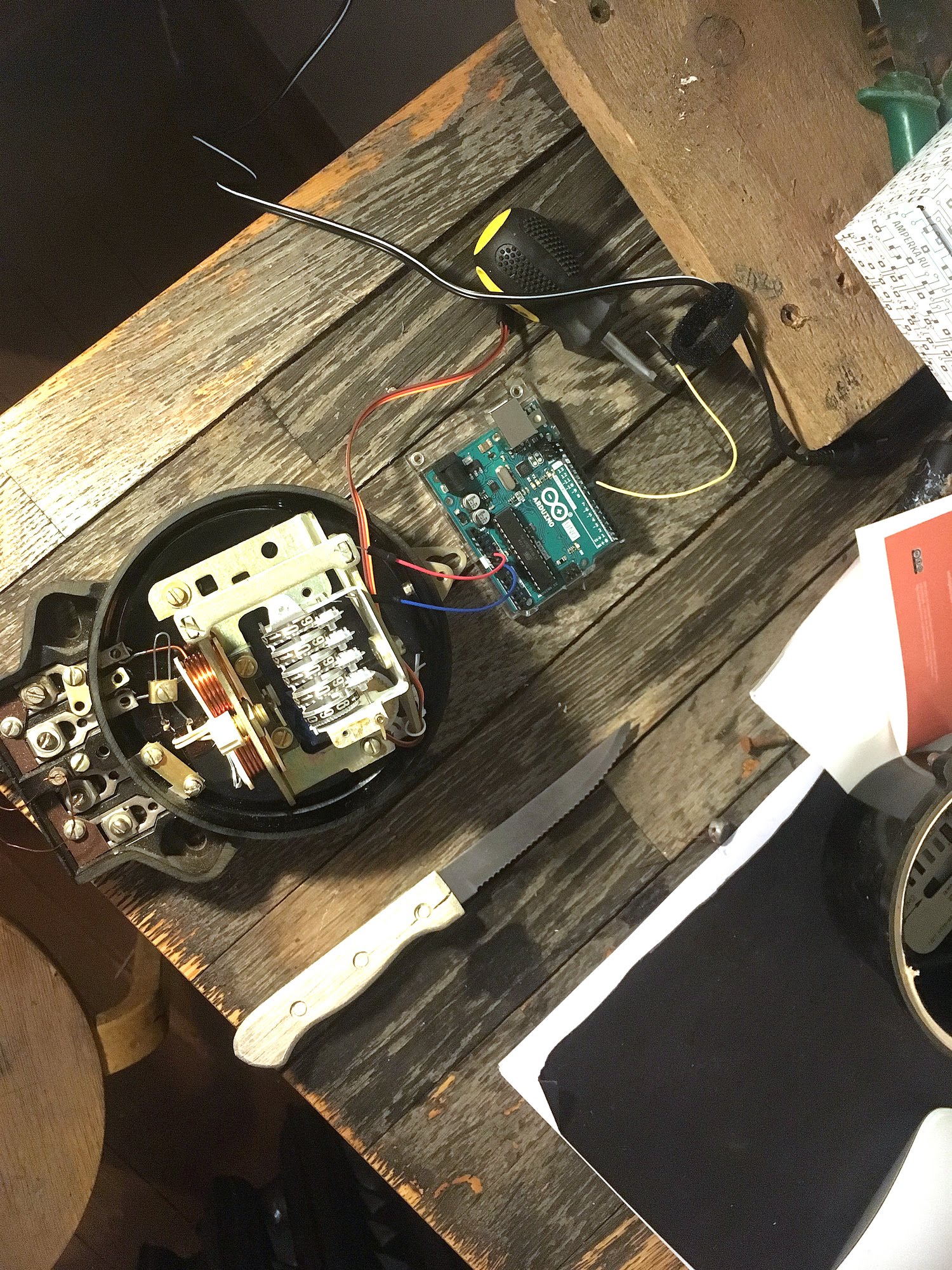
Wir haben eine physische Seite wie einen Zähler auf Facebook erstellt. Vom alten Stromzähler. Das Herzstück ist die programmierbare Iskra Neo-Karte von Amperka (analog zu Arduino) und ein Servomotor mit konstanter Rotation.

Um das Wachstum von Likes zu beobachten, haben wir eine Online-Kamera auf die Theke gerichtet und den Like-Button im Blog hervorgehoben. Ich beschäftige mich auch gerne mit Elektronik und verwalte Dinge über das Internet.
Dies ist die erste Erfahrung.
Wie wird das gemacht?
Die Elektronik für den Empfang von Likes wurde bereits im Amperka-Projekt zusammengestellt und getestet. Es reicht aus, sie zu sammeln. Es stellte sich heraus, dass es nicht so einfach war, wenn ich alles auf Arduino Uno anstelle von Spark machen wollte. Es hat aufgrund unterschiedlicher Prinzipien bei der Arbeit mit UART nicht funktioniert (das WiFi-Modul empfängt Signale über UART). Um keine Software UART zu schreiben, musste ich auf Arduino punkten und das Original Iskra Neo verwenden.
Das Modul kann die Anzahl der Likes nicht direkt von der fb-Seite anfordern, da es mit HTTPS nicht funktioniert. Um die Servereinschränkung zu umgehen, wird ein PHP-Skript aufgehängt, das die Anzahl der Likes erkennt und als Variable ausgegeben wird. Und das Modul greift bereits mit
AT-Befehlen auf die Adresse dieses PHP-Skripts zu (denken Sie daran, bevor das Modem ATDP XXX sagen konnte, wobei XXX die Telefonnummer ist, und er begann, sie anzurufen? Dies sind sie).
Die Elektronik war fertig, ich teilte die restlichen Aufgaben in zwei Teile:
- Messgerät fahren
- Management-Programm
Messgerät fahren
Es wäre großartig, eine elegante Lösung für den Anschluss eines Messgeräts mit Stromversorgung an die Originalspulen zu finden. Dann war es möglich, die rotierende Scheibe zu verlassen und das Design auf ein Minimum zu stören. Dies ist jedoch schwierig zu implementieren, weshalb sie es auf die nächste Version verschoben haben. Jetzt im Zähler ist ein Servomotor mit konstanter Drehung direkt an den Zahnrädern angebracht, die den Zähler drehen.


Management-Programm
Zuerst habe ich berechnet, wie viele Millisekunden der Motor eingeschaltet werden muss, damit sich die Scheibe um eine Umdrehung dreht. Es stellte sich heraus, ungefähr 1650 ms. Es wurde sofort klar, dass sich diese Zahl von der Spannung im Netzwerk (und aus irgendeinem Grund springt sie manchmal) und vom Gehen auf den Gegenrädern ändert. Sie wurden vor ungefähr 50 Jahren entwickelt und plus oder minus eine halbe Ziffer spielten damals keine Rolle.

Das Programm muss genau wissen, was der Zähler anzeigt, und zumindest sollten wir ihn manuell korrigieren können. Um herauszufinden, um wie viel Grad der Motor die Räder genau gedreht hat, benötigen Sie einen Sensor wie einen Drosselklappensensor an einem Auto. Dies ist schwierig.
Daher gibt es in der ersten Version zur Kontrolle der Genauigkeit der Messwerte eine elektronische Anzeige neben dem Zähler und zwei Tasten, mit denen der Zähler manuell korrigiert werden kann, wenn ein Fehler aufgetreten ist. Halbmanueller Modus und was zu tun ist.
Das Programm stellt eine Variable bereit, die die Anzahl der Likes auf einem physischen Zähler speichert. Wenn das Gerät ausgeschaltet wird, wird es im EPROM gespeichert und beim Einschalten von dort zurückgenommen.
Dies ist erforderlich, damit sie wissen, wie viel der Zähler repariert werden muss, wenn sie vom Netzwerk getrennt werden.
Was ist das Ergebnis?
Das Ergebnis war ein cooles Kunstobjekt. Bevor wir die Kamera aufstellen und in unserem Zimmer an die Wand hängen, haben wir sie zur Überprüfung in der gemeinsamen Coworking Zone veröffentlicht.
Er ist noch lange nicht perfekt. Mangelnde Genauigkeit, wenn die Stromversorgung eingeschaltet wird, dreht sich der Servomotor manchmal von selbst und es gibt keine originale rotierende Scheibe.
Wir werden in der nächsten Version fertigstellen.