Wahrscheinlich versucht jeder Fahrer von Zeit zu Zeit, seine fahrerischen Fähigkeiten zu bewerten. Wenn Sie beispielsweise Kindern sagen, wie man ein Auto fährt, denken Sie darüber nach, wie und warum Sie wissen, wann das vorausfahrende Auto nach links oder rechts abbiegt. Warum die Aufmerksamkeit automatisch auf den Hund gerichtet wird, der die Straße entlang geht, aber nicht auf Äste reagiert, die über der Straße hängen. Es gibt viele solche Fragen, aber nicht alle werden beantwortet.
Um das Fahren zu lernen, müssen Sie viele Prinzipien verstehen und die Regeln kennen - dies gilt sowohl für Menschen als auch für künstliche Intelligenz. Letztere sollten darauf achten, Tausende von Faktoren zu bewerten - wo und wann zu verlangsamen, wo abzuschalten und wo zu beschleunigen ist.
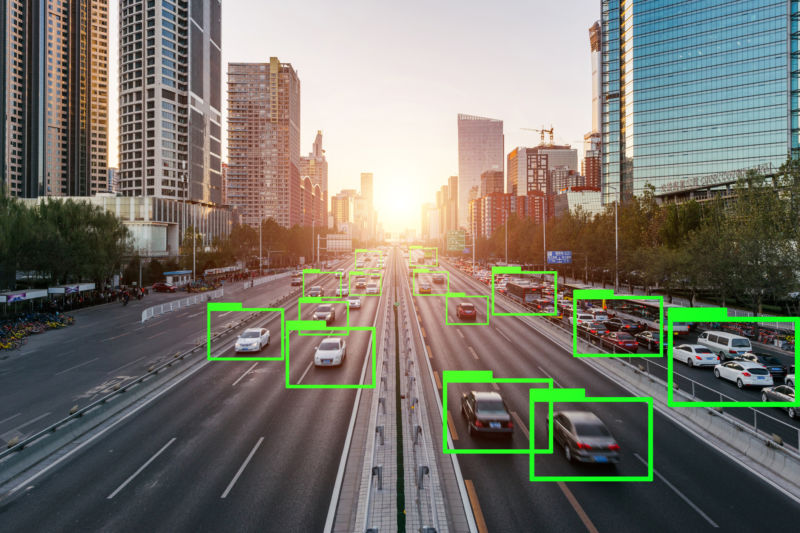
Autos mit dem höchsten Maß an Autonomie sollten nicht nur Markierungen, Signale und alles andere erkennen, sondern auch schnell
auf ungewöhnliche Situationen
reagieren können, die viele unterwegs sind. Selbst Robomobile, an deren Entwicklung sie seit Jahren beteiligt sind, reagieren auf solche Situationen nicht immer angemessen.
Ein Beispiel ist das Uber-Roboterauto, dessen Software beschlossen hat, ein implizites Objekt auf der Straße zu ignorieren, das sich als Frau in dunkler Kleidung herausstellte, und sogar mit einem Fahrrad, das die Straße an der falschen Stelle überquerte.
Gegenwärtig ist es üblich, sechs Autonomieebenen von Maschinen zu unterscheiden - von Null (alle Operationen werden von einer Person ausgeführt, es gibt keine Autonomie) bis zur fünften (alle Operationen werden von einem Bordcomputer ohne menschliches Eingreifen ausgeführt). In den allermeisten Fällen erreichten Robomobile die zweite Stufe der Autonomie, einschließlich des berüchtigten Tesla mit seinem fortschrittlichen Autopiloten.
Daimler hat gute Fortschritte gemacht, aber Versuche mit seinen Robocars finden in Deutschland statt, wo die Straßenmarkierungen und sie selbst fast perfekt sind und die Fahrer traditionell die Straßenregeln befolgen.
Waymo macht ebenfalls gute Fortschritte - neulich wurde die Einführung eines vollständig autonomen Robotax-Dienstes angekündigt. Zwar ist der Fahrer noch in der Kabine anwesend, die das Unternehmen als „Sicherheitsbetreiber“ bezeichnet. Wenn etwas schief geht, übernimmt der Bediener die Kontrolle. Höchstwahrscheinlich werden Robomobile mit einem höheren Maß an Autonomie erst in den 20er Jahren auf den Straßen erscheinen, aber vielleicht. Und später.
Eine vollständige Autonomie kann höchstwahrscheinlich erst nach dem Erscheinen einer spezialisierten Infrastruktur erreicht werden, die fast intelligenter sein sollte als das Robomobil selbst. Letztere müssen dann selbstständig lernen und verstehen, was um sie herum geschieht, und dann Entscheidungen treffen, ohne dass der Bediener daran beteiligt ist.
Ein Beispiel ist die Situation, wenn ein Passagier an einem regnerischen Abend in einem Robomobil fährt. Plötzlich überquert eine Katze die Straße. Was soll ein Robomobil tun? Offensichtlich müssen seine Systeme das bevorstehende Hindernis definitiv erkennen, damit die Maschine das erforderliche Manöver ausführt. Aber es ist notwendig, die örtlichen Geschwindigkeitsregeln zu kennen, sich vorzustellen, wie rutschig der Asphalt sein kann, und zu verstehen, wo sich das Auto zu diesem Zeitpunkt befindet. Ein Teil der Informationen kann von Drittanbietern bezogen werden (gleiche Wettervorhersage, Temperatur, Luftfeuchtigkeit und Windbedingungen), für die ein breiter und zuverlässiger Internetkanal erforderlich ist - höchstwahrscheinlich 5G.
Neben der Katze gibt es möglicherweise noch andere Hindernisse - zum Beispiel Robomobile, die ebenfalls versuchen, eine Kollision zu vermeiden. Das heißt, Robomobile müssen in der Lage sein, "zu kommunizieren", um die Handlungen des anderen zu einem bestimmten Zeitpunkt gut darzustellen. Und Sie müssen in Echtzeit kommunizieren. Andernfalls ist eine Kollision unvermeidlich, die die Gesundheit und das Leben des Maschinenbesitzers gefährdet.
Darüber hinaus muss das Robomobil in der Lage sein, den optimalen Weg zum endgültigen Fahrpunkt zu ebnen. Dies bedeutet, dass die Maschine Kartendaten, Markup-Informationen, Schilder und andere Informationen benötigt. Um das Leistungsspektrum von Robomobilen zu erweitern, sollten sie immer miteinander in Kontakt bleiben, um Informationen über die Umgebung auszutauschen. Aber es gibt immer noch die Frage nach Maschinen, die von Menschen gesteuert werden. Es stellt sich heraus, dass sie auch mit Kommunikationssystemen mit Robomobilen ausgestattet sein müssen - andernfalls werden die letzteren nicht verstehen, was die ersteren tun.
Wenn Sie sich vorstellen, dass mit dem breitesten Kommunikationskanal etwas passieren könnte, selbst wenn das Problem nur vorübergehend ist, wird die Situation noch komplizierter. Und wir haben gewöhnliche Probleme wie "Trolley-Probleme" und viele andere nicht erwähnt.
Höchstwahrscheinlich sind in den nächsten Jahren keine Autonomiestufen von 4 bis 5 zu erwarten - sie werden sehr bald auftreten.