 Beim letzten Mal haben
Beim letzten Mal haben wir die Möglichkeit in Betracht gezogen, Impulse für Schrittmotoren zu erzeugen, die teilweise aus der Software auf Firmware-Ebene entfernt wurden. Im Falle eines vollständigen Erfolgs verspricht dies, dass keine Interrupts verarbeitet werden müssen, die mit einer Frequenz von bis zu 40 kHz ankommen. Diese Option weist jedoch eine Reihe offensichtlicher Mängel auf. Erstens werden Beschleunigungen dort nicht unterstützt. Zweitens beträgt die Granularität der zulässigen Schrittfrequenzen in dieser Lösung Hunderte von Hertz (zum Beispiel ist es möglich, Frequenzen von 40.000 Hz und 39966 Hz zu erzeugen, aber es ist unmöglich, Frequenzen mit einer Größe zwischen diesen beiden Werten zu erzeugen).
Beschleunigungsimplementierung
Ist es möglich, die angegebenen Nachteile mit denselben UDB-Tools zu beseitigen, ohne das System zu komplizieren? Lass es uns richtig machen. Beginnen wir mit dem Schwierigsten - mit Beschleunigungen. Beschleunigungen werden am Anfang und Ende des Pfades hinzugefügt. Erstens, wenn Hochfrequenzimpulse sofort an den Schrittmotor angelegt werden, benötigt er einen größeren Strom, um den Betrieb zu starten. Ein hoher zulässiger Strom ist Erwärmung und Rauschen, daher ist es besser, ihn zu begrenzen. Aber dann kann der Motor beim Start Schritte überspringen. Es ist also besser, den Motor sanft zu beschleunigen. Zweitens, wenn ein schwerer Kopf abrupt stoppt, erfährt er Transienten, die mit Trägheit verbunden sind. Wellen sind auf Plastik sichtbar. Daher ist es reibungslos notwendig, den Kopf nicht nur zu zerstreuen, sondern auch anzuhalten. Klassischerweise wird ein Diagramm der Motordrehzahl als Trapez dargestellt. Hier ist ein Fragment aus dem Quellcode der Marlin-Firmware:

Ich werde nicht einmal versuchen herauszufinden, ob es möglich ist, dies mit UDB zu implementieren. Dies liegt an der Tatsache, dass jetzt eine andere Art der Beschleunigung in Mode ist: nicht trapezförmig, sondern S-Kurve. Ihr Zeitplan sieht folgendermaßen aus:
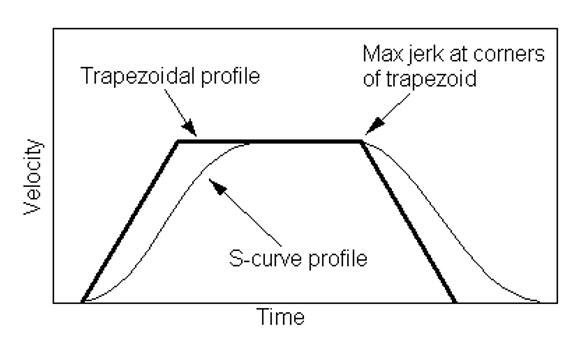
Dies ist definitiv nicht für UDB. Aufgeben? Überhaupt nicht! Ich habe bereits festgestellt, dass UDB keine Hardwareschnittstelle implementiert, sondern lediglich die Übertragung eines Teils des Codes von der Software auf die Firmware-Ebene ermöglicht. Lassen Sie das Profil den Zentralprozessor berechnen, und die Bildung von Schrittimpulsen führt immer noch UDB durch. Der Zentralprozessor hat viel Zeit für Berechnungen. Die Aufgabe, häufige Unterbrechungen zu vermeiden, wird weiterhin recht elegant gelöst, und niemand hat geplant, den Prozess vollständig auf Firmware-Ebene zu bringen.
Natürlich muss das Profil im Speicher vorbereitet werden, und UDB nimmt mit DMA Daten von dort auf. Aber wie viel Speicher wird benötigt? Ein Millimeter benötigt 200 Schritte. Jetzt mit 24-Bit-Codierung sind dies 600 Bytes pro 1 mm Kopfbewegung! Erinnern Sie sich noch einmal an nicht so häufige, aber immer noch ständige Unterbrechungen, um alles in Fragmenten zu übertragen? Nicht wirklich! Tatsache ist, dass der DMA-Mechanismus von PSoC auf Deskriptoren basiert. Nachdem die Aufgabe von einem Deskriptor ausgeführt wurde, fährt der DMA-Controller mit dem nächsten fort. Entlang der Kette können Sie also viele Deskriptoren verwenden. Wir veranschaulichen dies anhand einer Zeichnung aus der offiziellen Dokumentation:

Tatsächlich kann dieser Mechanismus auch verwendet werden, indem eine Kette von drei Deskriptoren erstellt wird:
| Nein, nein. | Erklärung |
|---|
| 1 | Vom Speicher zum FIFO mit Adressinkrement. Zeigt einen Abschnitt mit einem Beschleunigungsprofil an. |
| 2 | Vom Speicher zum FIFO ohne Adressinkrement. Sendet für konstante Geschwindigkeit die ganze Zeit an dasselbe Wort im Speicher. |
| 3 | Vom Speicher zum FIFO mit Adressinkrement. Zeigt einen Abschnitt mit einem Bremsprofil an.
|
Es stellt sich heraus, dass der Hauptpfad in Schritt 2 beschrieben wird und dort physikalisch dasselbe Wort verwendet wird, das die konstante Geschwindigkeit festlegt. Der Speicherverbrauch ist nicht groß. In der Realität kann der zweite Deskriptor physikalisch durch zwei oder drei Deskriptoren dargestellt werden. Dies liegt an der Tatsache, dass die maximale Pumplänge laut TRM 64 Kilobyte betragen kann (die Änderung wird geringer sein). Das sind 32.767 Wörter. Das bei 200 Schritten pro Millimeter entspricht einem Weg von 163 Millimetern. Abhängig von der maximalen Entfernung, die der Motor gleichzeitig fahren kann, müssen Sie möglicherweise ein Segment aus zwei oder drei Teilen erstellen.
Um Speicherplatz (und die Kosten für UDB-Blöcke) zu sparen, schlage ich dennoch vor, 24-Bit-DatapPath-Blöcke aufzugeben und auf wirtschaftlichere 16-Bit-Blöcke umzusteigen.
Also. Der erste Vorschlag zur Überarbeitung.
Im Speicher werden Arrays vorbereitet, die die Dauer der Schritte codieren. Ferner gehen diese Informationen unter Verwendung von DMA an UDB. Der geradlinige Abschnitt wird von einem Array aus einem Element codiert. Der DMA-Block erhöht die Adresse nicht und wählt immer das gleiche Element aus. Beschleunigungs-, geradlinige und Bremsabschnitte werden über die im DMA-Controller verfügbaren Mittel verbunden.Feineinstellung des Mitteltonbereichs
Nun werden wir uns überlegen, wie das Problem der Frequenzgranularität überwunden werden kann. Natürlich kann es nicht genau eingestellt werden. Tatsächlich kann die ursprüngliche "Firmware" dies jedoch auch nicht. Stattdessen verwenden sie den Bresenham-Algorithmus. Einige Schritte werden um eine Maßnahme verzögert. Infolgedessen wird die durchschnittliche Frequenz zwischen einem kleineren und einem größeren Wert dazwischen. Durch Anpassen des Verhältnisses von regulären und längeren Perioden können Sie die durchschnittliche Frequenz problemlos ändern. Wenn unsere Geschwindigkeit jetzt nicht über das Datenregister eingestellt, sondern über FIFO übertragen wird und die Anzahl der Impulse im Allgemeinen über die Anzahl der über DMA übertragenen Wörter eingestellt wird, werden beide Datenregister in UDB freigegeben. Zusätzlich wird eine der Batterien freigegeben, die die Anzahl der Impulse zählt. Hier werden wir eine bestimmte PWM darauf aufbauen.
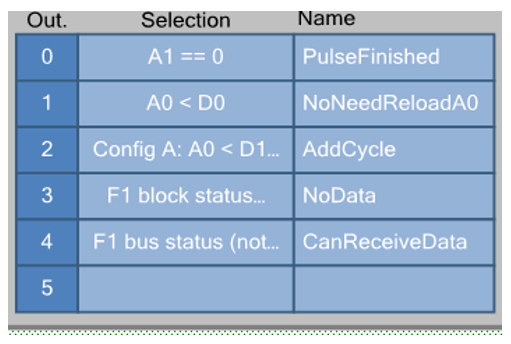
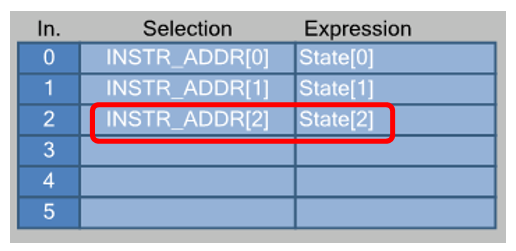
In der Regel vergleichen ALUs Register mit demselben Index und weisen sie zu. Wenn ein Register einen Index von 0 und das andere eine 1 hat, kann nicht jede Version der Operation implementiert werden. Aber ich habe es geschafft, den Solitaire aus den Registern zusammenzustellen, unter denen PWM durchgeführt werden kann. Es stellte sich heraus, wie in der Abbildung gezeigt.

Wenn die Bedingung A0 <D1 erfüllt ist, fügen wir der gegebenen Pulslänge einen zusätzlichen Schlag hinzu. Wenn die Bedingung nicht erfüllt ist, werden wir nicht.
Kugelpferd unter normalen Bedingungen
Daher beginnen wir, den entwickelten Block für UDB unter Berücksichtigung der neuen Architektur zu modifizieren. Ersetzen Sie die Datapath-Bittiefe:
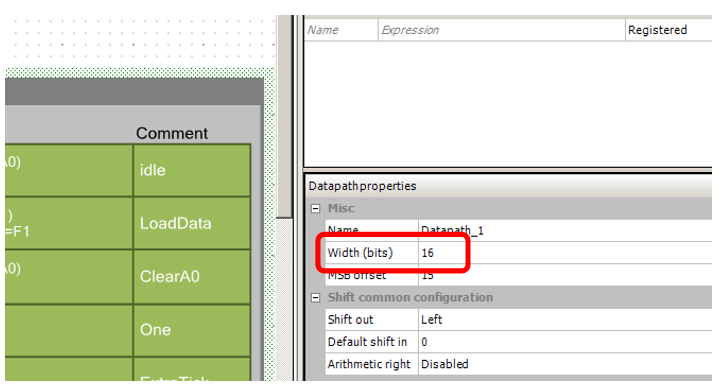
Wir werden viel mehr Ausgänge von Datapath brauchen als beim letzten Mal.
Wenn Sie darauf doppelklicken, sehen Sie die Details:

Es gibt mehr Ziffern für die Statusvariable. Vergessen Sie nicht, die ältere zu verbinden !!! In der alten Version gab es eine Konstante 0.
Das Übergangsdiagramm des Automaten, das ich erhalten habe, lautet wie folgt:

Wir befinden uns im Ruhezustand, während FIFO1 leer ist. Die Arbeit mit FIFO1 und nicht mit FIFO0 ist übrigens das Ergebnis der Bildung von Solitaire. Das Register A0 wird verwendet, um PWM zu implementieren, so dass die Impulsbreite durch das Register A1 bestimmt wird. Und ich kann es nur von FIFO1 herunterladen (vielleicht gibt es andere geheime Methoden, aber sie sind mir nicht bekannt). Daher lädt DMA Daten genau in FIFO1 hoch, und genau der Status
"Nicht leer" für FIFO1 verlässt den Ruhezustand.
ALU im
IDLE- Status macht das Register A0 ungültig:

Dies ist notwendig, damit zu Beginn des PWM-Betriebs die Arbeit immer von vorne beginnt.
Aber die Daten kamen in den FIFO. Der Computer wechselt in den
LoadData- Status:
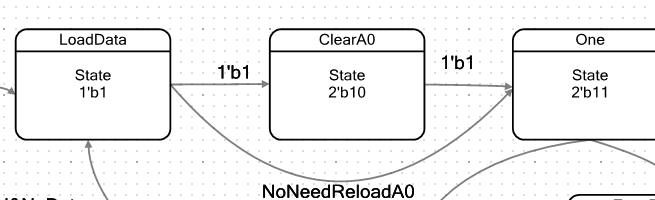
In diesem Zustand lädt die ALU das nächste Wort vom FIFO in das Register A1. Um keine unnötigen Zustände zu erzeugen, wird der Wert des Zählers A0, der für die Arbeit mit PWM verwendet wird, erhöht:

Wenn der Zähler A0 den Wert D0 noch nicht erreicht hat (
dh die Bedingung A0 <D0 wird ausgelöst, wobei das Flag
NoNeedReloadA0 gespannt wird ), gehen wir zum Zustand
Eins . Andernfalls lautet der Status
ClearA0 .
Im
ClearA0- Zustand
setzt die ALU einfach den Wert von A0 auf
Null und startet einen neuen PWM-Zyklus:

Danach geht die Maschine auch in
einen Zustand über, nur einen Schlag später.
Man kennt uns aus der alten Version der Maschine. Die darin enthaltene ALU führt keine Funktionen aus.
Und so - in diesem Zustand wird eine Einheit am Ausgang von
Out_Step erzeugt (hier hat der Optimierer besser funktioniert, wenn die Einheit durch die Bedingung erzeugt wird, dies wurde empirisch erkannt).
Wir befinden uns in diesem Zustand, bis der uns bereits bekannte Sieben-Bit-Zähler auf Null zurückgesetzt wird. Aber wenn wir früher auf einem Weg aus diesem Zustand herausgekommen sind, kann es jetzt zwei Wege geben: direkt und verzögert im Takt.
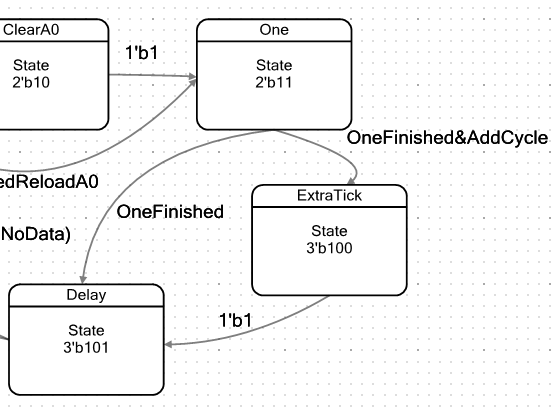
Wir werden in den ExtraTick-Status versetzt, wenn das
AddCycle- Flag
gesetzt ist , das zugewiesen ist, um die Bedingung A0 <D1 zu erfüllen. In diesem Zustand führt die ALU keine nützlichen Aktionen aus. Es ist nur so, dass der Zyklus 1 Schlag länger dauert. Außerdem konvergieren alle Pfade im
Verzögerungszustand .
Dieser Zustand misst die Dauer des Impulses. Das Register A1 (geladen, während es sich noch im
Ladezustand befindet ) wird reduziert, bis es Null erreicht.

Abhängig davon, ob zusätzliche Daten im FIFO vorhanden sind oder nicht, wechselt die Maschine zum Abrufen des nächsten Abschnitts im
Ladezustand oder im
Ruhezustand . Schauen wir uns das nicht in der Abbildung an (es gibt lange Pfeile, alles wird klein sein), sondern in Form einer Tabelle, indem Sie auf den
Verzögerungsstatus doppelklicken:
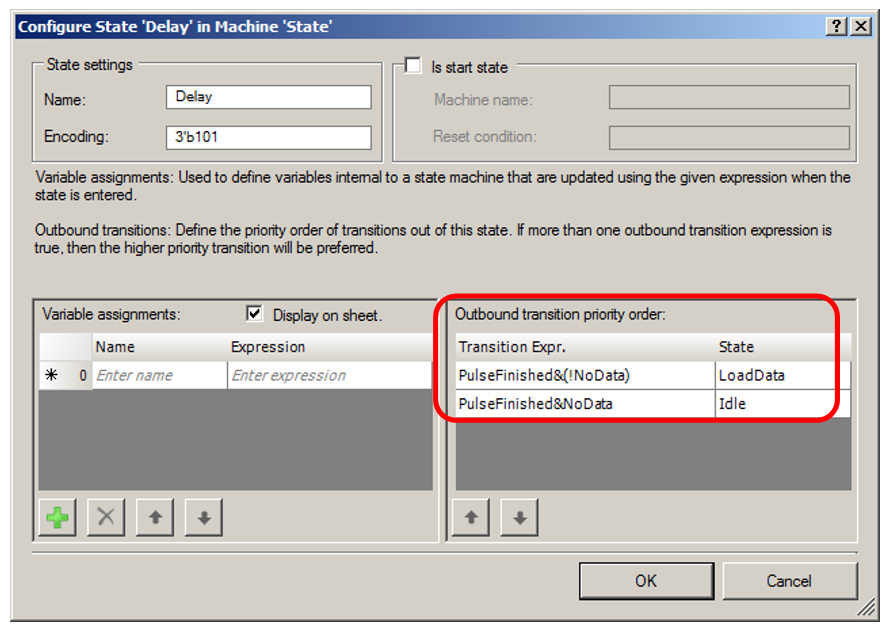
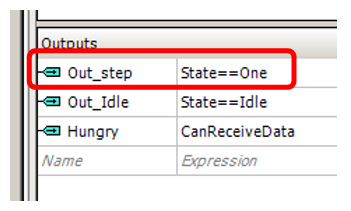
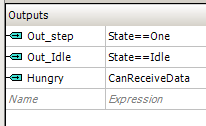
Beendet jetzt UDB. Ich habe das Flag "Im
Ruhezustand" in einen asynchronen Vergleich umgewandelt (in der vorherigen Version gab es einen Trigger, der in verschiedenen Zuständen gespannt und zurückgesetzt wurde), da der Optimierer dafür das beste Ergebnis zeigte. Außerdem wurde das
Hungry- Flag hinzugefügt, das der DMA-Einheit signalisiert, dass sie bereit ist, Daten zu empfangen. Es ist auf der Flagge
„FIFO1 ist nicht überfüllt“ aufgewickelt. Da es nicht überfüllt ist, kann DMA dort ein anderes Datenwort laden.
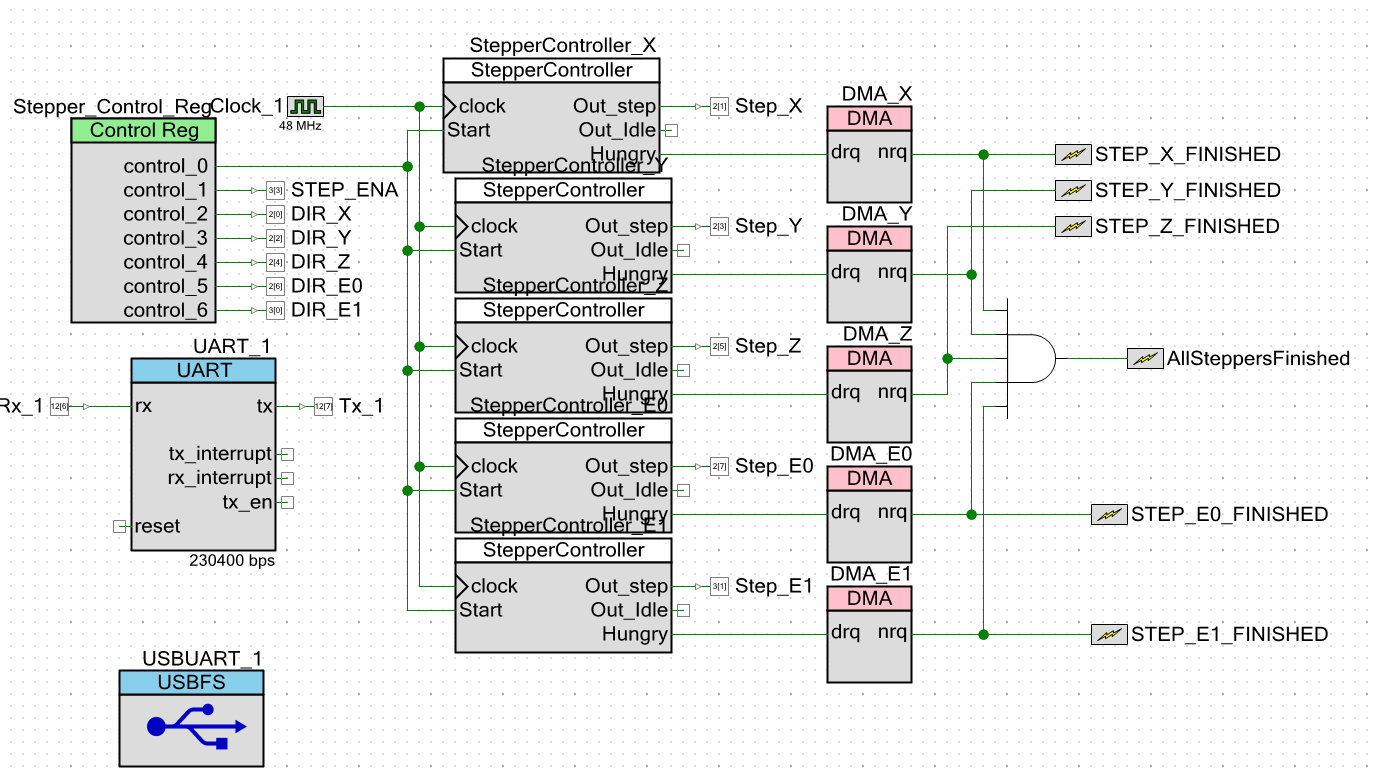
Auf der automatischen Seite - das war's.
Fügen Sie dem Hauptprojektdiagramm DMA-Blöcke hinzu. Vorerst habe ich angefangen, DMA-Beendigungsflags zu unterbrechen, aber nicht die Tatsache, dass dies korrekt ist. Wenn der Prozess des direkten Zugriffs auf den Speicher abgeschlossen ist, können Sie einen neuen Prozess starten, der sich auf dasselbe Segment bezieht. Sie können jedoch keine Informationen über das neue Segment ausfüllen. FIFO hat noch drei bis vier Elemente. Zu diesem Zeitpunkt ist es immer noch unmöglich, die Register D0 und D1 des Blocks basierend auf UDB neu zu programmieren, sie werden immer noch für den Betrieb benötigt. Daher ist es möglich, dass Interrupts basierend auf den
Out_Idle- Ausgängen später hinzugefügt werden. Diese Küche wird sich jedoch nicht mehr auf die UDB-Blockprogrammierung beziehen, daher werden wir sie nur nebenbei erwähnen.
Software-Experimente
Da jetzt nicht alles bekannt ist, werden wir keine speziellen Funktionen schreiben. Alle Kontrollen werden "Auf der Stirn" durchgeführt. Basierend auf erfolgreichen Experimenten können dann API-Funktionen geschrieben werden. Also. Wir machen die
main () - Funktion minimal. Es richtet einfach das System ein und ruft den ausgewählten Test auf.
int main(void) { CyGlobalIntEnable;
Versuchen wir, ein Paket von Impulsen zu senden, indem wir eine Funktion aufrufen und die Tatsache überprüfen, dass ein zusätzlicher Impuls eingefügt wird. Der Funktionsaufruf ist einfach:
TestShortSteps();
Aber der Körper bedarf einer Erklärung.
Ich werde zuerst die ganze Funktion geben void TestShortSteps() { // , // // , DMA !!! // , !!! StepperController_X_SingleVibrator_WritePeriod (6); // // — CY_SET_REG16(StepperController_X_Datapath_1_D0_PTR, 4); CY_SET_REG16(StepperController_X_Datapath_1_D1_PTR, 2); // . // static const uint16 steps[] = { 0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001, 0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001,0x0001 }; // DMA , uint8 channel = DMA_X_DmaInitialize (sizeof(steps[0]),1,HI16(steps),HI16(StepperController_X_Datapath_1_F1_PTR)); CyDmaChRoundRobin (channel,true); // , uint8 td = CyDmaTdAllocate(); // . , . CyDmaTdSetConfiguration(td, sizeof(steps), CY_DMA_DISABLE_TD, TD_INC_SRC_ADR | TD_AUTO_EXEC_NEXT); // CyDmaTdSetAddress(td, LO16((uint32)steps), LO16((uint32)StepperController_X_Datapath_1_F1_PTR)); // CyDmaChSetInitialTd(channel, td); // CyDmaChEnable(channel, 1); }
Betrachten Sie nun die wichtigen Teile.
Wenn die Länge des positiven Teils des Impulses 92 Taktzyklen entspricht, kann das Oszilloskop nicht erkennen, ob sich im negativen Teil ein Einzelzyklus-Einsatz befindet oder nicht. Die Skala wird nicht gleich sein. Es ist notwendig, den positiven Teil so kurz wie möglich zu machen, damit der Gesamtimpuls im Maßstab mit dem eingefügten Schlag vergleichbar ist. Daher ändere ich die Periode des Zählers, die die Dauer des positiven Teils des Impulses festlegt, mit Nachdruck:
// , // // , DMA !!! // , !!! StepperController_X_SingleVibrator_WritePeriod (6);
Aber warum sechs ganze Maßnahmen? Warum nicht drei? Warum nicht zwei? Warum doch keiner? Das ist eine traurige Geschichte. Wenn der positive Impuls kürzer als 6 Zyklen ist, funktioniert das System nicht. Langes Debuggen auf einem Oszilloskop mit der Ausgabe von Testleitungen nach außen zeigte, dass DMA keine schnelle Sache ist. Wenn die Maschine weniger als eine bestimmte Dauer läuft, ist das FIFO zum Zeitpunkt des
Verlassens des Verzögerungsstatus meistens noch leer. Es darf noch kein einziges neues Datenwort platziert werden! Und nur wenn der positive Teil des Impulses eine Dauer von 6 Zyklen hat, hat FIFO garantiert Zeit zum Laden ...
Latenz Exkurs
Eine weitere feste Idee, die mir in den Sinn kommt, ist die Hardwarebeschleunigung bestimmter Funktionen des Kernels unseres RTOS MAX. Aber leider sind alle meine besten Ideen über die gleichen Latenzen gebrochen.
Es gab einen Fall, in dem ich die Entwicklung von Bare-Metal-Anwendungen für Cyclone V SoC untersucht habe. Es stellte sich jedoch heraus, dass die Arbeit mit einzelnen FPGA-Registern (wenn abwechselnd darauf geschrieben und dann von ihnen gelesen wird) die Kernoperation hunderte (!!!) Mal reduziert. Du hast richtig gehört. Es ist in Hunderten. Darüber hinaus ist all dies schlecht dokumentiert, aber zuerst spürte ich innerlich und bewies dann anhand von Phrasenfetzen aus der Dokumentation, dass Latenzen schuldig waren, wenn Anfragen über eine Reihe von Brücken weitergeleitet wurden. Wenn Sie ein großes Array austreiben müssen, tritt ebenfalls eine Latenz auf, die jedoch in Bezug auf ein gepumptes Wort nicht von Bedeutung ist. Wenn die Anforderungen einzeln sind (und die Hardwarebeschleunigung des Betriebssystemkerns nur diese impliziert), erfolgt die Verlangsamung genau hunderte Male. Es wird viel schneller sein, alles rein programmatisch zu erledigen, wenn das Programm mit rasendem Tempo mit dem Hauptspeicher durch den Cache arbeitet.
Auf PSoC hatte ich auch bestimmte Pläne. Im Erscheinungsbild können Sie mit DMA und UDB wunderbar nach Daten in einem Array suchen. Was ist wirklich da! Aufgrund der DMA-Deskriptorstruktur könnten diese Controller eine vollständige Hardware-Suche in verknüpften Listen durchführen! Nachdem ich den oben beschriebenen Stecker erhalten hatte, stellte ich fest, dass er auch mit Latenz verbunden ist. Hier wird diese Latenz in der Dokumentation sehr schön beschrieben. Sowohl in der Familie TRM als auch in einem separaten Dokument
AN84810 - PSoC 3 und PSoC 5LP Advanced DMA Topics . Dort ist Abschnitt 3.2 diesem Thema gewidmet. Die nächste Hardwarebeschleunigung wird also abgebrochen. Schade. Aber wie Semyon Semyonovich Gorbunkov sagte: "Wir werden suchen."
Fortsetzung der Softwareexperimente
Als nächstes stelle ich die Parameter des Bresenham-Algorithmus ein:
// // — CY_SET_REG16(StepperController_X_Datapath_1_D0_PTR, 4); CY_SET_REG16(StepperController_X_Datapath_1_D1_PTR, 2);
Nun, dann kommt der reguläre Code, der ein Array von Wörtern über DMA an FIFO1 des Motorsteuergeräts X überträgt.
Das Ergebnis bedarf einiger Erklärung. Da ist er:

Der Wert des Zählers A0 wird rot angezeigt, wenn sich die Maschine im Zustand
Eins befindet . Das grüne Sternchen zeigt Fälle an, in denen die Verzögerung eingefügt wird, weil sich das Gerät im
ExtraTick- Status befindet. Es gibt auch Balken, bei denen die Verzögerung auf den
ClearA0- Status zurückzuführen ist. Sie sind mit einem blauen Raster gekennzeichnet.
Wie Sie sehen, geht beim ersten Eingeben die allererste Verzögerung verloren. Dies liegt an der Tatsache, dass A0 im
Leerlauf zurückgesetzt wird , sich jedoch erhöht, wenn es
LoadData eingibt . Bis zur Analyse (Austritt aus dem Zustand
Eins ) ist es daher bereits gleich Einheit. Der Account beginnt bei ihr. Im Allgemeinen wirkt sich dies jedoch nicht auf die Mittelfrequenz aus. Es muss nur beachtet werden. Da zu beachten ist, dass beim Zurücksetzen von A0 auch die Uhr eingefügt wird. Dies muss bei der Berechnung der Durchschnittsfrequenz berücksichtigt werden.
Im Allgemeinen ist die Anzahl der Impulse jedoch korrekt. Ihre Dauer ist auch glaubwürdig.
Versuchen wir, eine realere Kette von Deskriptoren zu programmieren.
bestehend aus einer Phase des Beschleunigens, der linearen Bewegung und des Bremsens. void TestWithPacking(int countOnLinearStage) { // , // . // , DMA !!! // , !!! StepperController_X_SingleVibrator_WritePeriod (6); // // — CY_SET_REG16(StepperController_X_Datapath_1_D0_PTR, 4); CY_SET_REG16(StepperController_X_Datapath_1_D1_PTR, 2); // static const uint16 accelerate[] = {0x0010,0x0008,0x0004}; // static const uint16 deccelerate[] = {0x004,0x0008,0x0010}; // . . static const uint16 steps[] = {0x0001}; // DMA , uint8 channel = DMA_X_DmaInitialize (sizeof(steps[0]),1,HI16(steps),HI16(StepperController_X_Datapath_1_F1_PTR)); CyDmaChRoundRobin (channel,true); // uint8 tdDeccelerate = CyDmaTdAllocate(); CyDmaTdSetConfiguration(tdDeccelerate, sizeof(deccelerate), CY_DMA_DISABLE_TD, TD_INC_SRC_ADR | TD_AUTO_EXEC_NEXT); CyDmaTdSetAddress(tdDeccelerate, LO16((uint32)deccelerate), LO16((uint32)StepperController_X_Datapath_1_F1_PTR)); // uint8 tdSteps = CyDmaTdAllocate(); // !!! // !!! CyDmaTdSetConfiguration(tdSteps, countOnLinearStage, tdDeccelerate, /*TD_INC_SRC_ADR |*/ TD_AUTO_EXEC_NEXT); CyDmaTdSetAddress(tdSteps, LO16((uint32)steps), LO16((uint32)StepperController_X_Datapath_1_F1_PTR)); // // !!! uint8 tdAccelerate = CyDmaTdAllocate(); CyDmaTdSetConfiguration(tdAccelerate, sizeof(accelerate), tdSteps, TD_INC_SRC_ADR | TD_AUTO_EXEC_NEXT); CyDmaTdSetAddress(tdAccelerate, LO16((uint32)accelerate), LO16((uint32)StepperController_X_Datapath_1_F1_PTR)); // CyDmaChSetInitialTd(channel, tdAccelerate); // CyDmaChEnable(channel, 1); }
Rufen Sie zunächst dieselben zehn Schritte auf (in DMA gehen tatsächlich 20 Bytes):
TestWithPacking (20);
Das Ergebnis ist wie erwartet. Zu Beginn ist eine Beschleunigung sichtbar. Und der Ausgang zu
IDLE (blauer Strahl) erfolgt mit einer großen Verzögerung vom letzten Impuls, dann war der letzte Schritt vollständig abgeschlossen, sein Wert ist ungefähr gleich dem Wert des ersten.
Echtes Pferd unter normalen Bedingungen
Beim Umbau der Ausrüstung bin ich irgendwie von einer 24-Bit-Impulsbreite zu einem 16-Bit-Job gesprungen. Wir haben jedoch herausgefunden, dass dies nicht möglich ist: Die minimale Pulsfrequenz ist zu hoch. Ich habe es absichtlich gemacht. Tatsache ist, dass sich die Technik zum Erweitern der Bitkapazität eines 16-Bit-Zählers als so kompliziert herausstellte, dass sie, wenn ich sie zusammen mit der Hauptmaschine beschrieben hätte, die ganze Aufmerksamkeit abgelenkt hätte. Daher betrachten wir es separat.
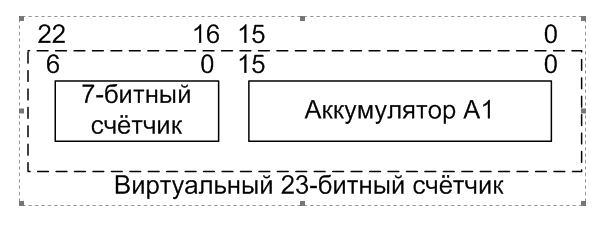
Wir haben eine 16-Bit-Batterie. Ich beschloss, den hohen Bits die Sieben-Bit-Zähler-Standardentität hinzuzufügen. Was ist dieser Sieben-Bit-Zähler? Dies ist das Design, das in jedem UDB-Block verfügbar ist (der Basis-UDB-Block hat eine Bitbreite aller 8-Bit-Register, die Zunahme der Bittiefe wird durch die Kombination von Blöcken in Gruppen bestimmt). Von denselben Ressourcen können
Steuer- / Statusregister implementiert werden. Jetzt haben wir einen Zähler und kein einziges
Steuerungs- / Statuspaar für 16 Datenbits. Wenn Sie dem System einen weiteren Zähler hinzufügen, werden wir die zusätzlichen Ressourcen nicht verzögern. Wir nehmen nur das, was uns bereits zugewiesen ist. Das ist schön! Wir machen das hohe Byte des Impulsbreitenzählers durch diesen Mechanismus und erhalten die Gesamtbreite des Impulsbreitenzählers gleich 23 Bit.
Zuerst werde ich sagen, was ich gedacht habe. Ich dachte, dass ich nach dem Verlassen des
Verzögerungsstatus den Abschluss der Zählung dieses zusätzlichen Zählers überprüfen würde. Wenn er nicht fertig gezählt hat, werde ich seinen Wert reduzieren und wieder in den
Verzögerungszustand wechseln. Wenn Sie gezählt haben, bleibt die Logik unverändert, ohne zusätzliche Zyklen hinzuzufügen.
Darüber hinaus besagt die Dokumentation für diesen Zähler, dass ich Recht habe. Wörtlich heißt es:
Zeitraum
Definiert den Anfangsperiodenregisterwert. Für eine Periode von N Takten sollte der Periodenwert auf den Wert von N-1 gesetzt werden. Der Zähler zählt von N-1 bis 0, was zu einer N-Taktzyklusperiode führt. Ein Periodenregisterwert von 0 wird nicht unterstützt und führt dazu, dass die Terminalzählausgabe auf einem konstant hohen Zustand gehalten wird.
Das Leben hat gezeigt, dass alles anders ist. Ich habe den Zustand der
Terminalzähllinie auf dem Oszilloskop abgeleitet und ihren Wert bei einer vorinstallierten Null in
Periode und während des Programmladens beobachtet. Ach und ah. Es gab keinen
konstant hohen Zustand !
Durch Versuch und Irrtum gelang es mir, das System ordnungsgemäß zum Laufen zu bringen, aber dazu muss mindestens eine Subtraktion vom Zähler erfolgen! Der neue Zustand der
"Subtraktion" ist nicht auf der Seite. Es musste in den erforderlichen Pfad eingeklemmt werden. Es befindet sich vor dem
Verzögerungsstatus und heißt
Next65536 .
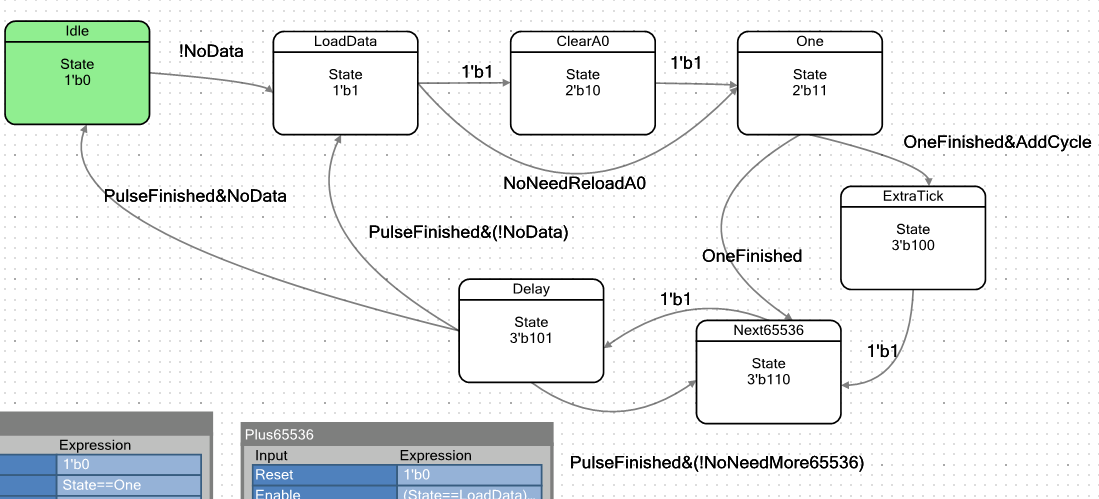
ALU führt in diesem Zustand keine nützlichen Aktionen aus. Tatsächlich reagiert nur ein neuer Zähler auf die Tatsache, dass er sich in diesem Zustand befindet. Hier ist es im Diagramm:
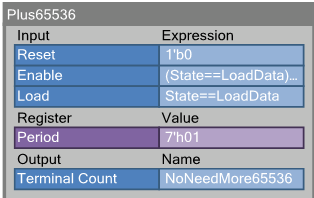
Hier sind seine Eigenschaften im Detail:
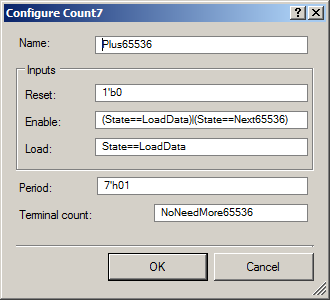
Unter Berücksichtigung der vorherigen Artikel ist das Wesen dieses Zählers im Allgemeinen klar. Nur die
Enable- Linie leidet. Auch hier verstehe ich nicht ganz, warum es eingeschaltet werden sollte, wenn sich die Maschine im
LoadData- Status befindet (dann lädt der Zähler den Periodenwert neu). Ich habe diesen Trick aus den Eigenschaften des Zählers entlehnt, der die LEDs steuert, der dem englischen Autor der Steuereinheit für diese LEDs entnommen wurde. Ohne sie funktioniert der Nullwert der Periode nicht. Sie arbeitet mit ihr.
Im API-Code fügen wir die Initialisierung eines neuen Zählers hinzu. Jetzt sieht die Startfunktion folgendermaßen aus:
void `$INSTANCE_NAME`_Start() { `$INSTANCE_NAME`_SingleVibrator_Start(); //"One" Generator start `$INSTANCE_NAME`_Plus65536_Start(); }
Schauen wir uns das neue System an. Hier ist der Funktionscode zum Testen
(darin unterscheidet sich nur die erste Zeile von der bereits bekannten): void JustTest(int extra65536s) { // 65536 StepperController_X_Plus65536_WritePeriod((uint8) extra65536s); // // — CY_SET_REG16(StepperController_X_Datapath_1_D0_PTR, 4); CY_SET_REG16(StepperController_X_Datapath_1_D1_PTR, 2); // . // static const uint16 steps[] = { 0x1000,0x1000,0x1000,0x1000 }; // DMA , uint8 channel = DMA_X_DmaInitialize (sizeof(steps[0]),1,HI16(steps),HI16(StepperController_X_Datapath_1_F1_PTR)); CyDmaChRoundRobin (channel,true); // , uint8 td = CyDmaTdAllocate(); // . , . CyDmaTdSetConfiguration(td, sizeof(steps), CY_DMA_DISABLE_TD, TD_INC_SRC_ADR | TD_AUTO_EXEC_NEXT); // CyDmaTdSetAddress(td, LO16((uint32)steps), LO16((uint32)StepperController_X_Datapath_1_F1_PTR)); // CyDmaChSetInitialTd(channel, td); // CyDmaChEnable(channel, 1); }
Wir nennen es so:
JustTest(0);
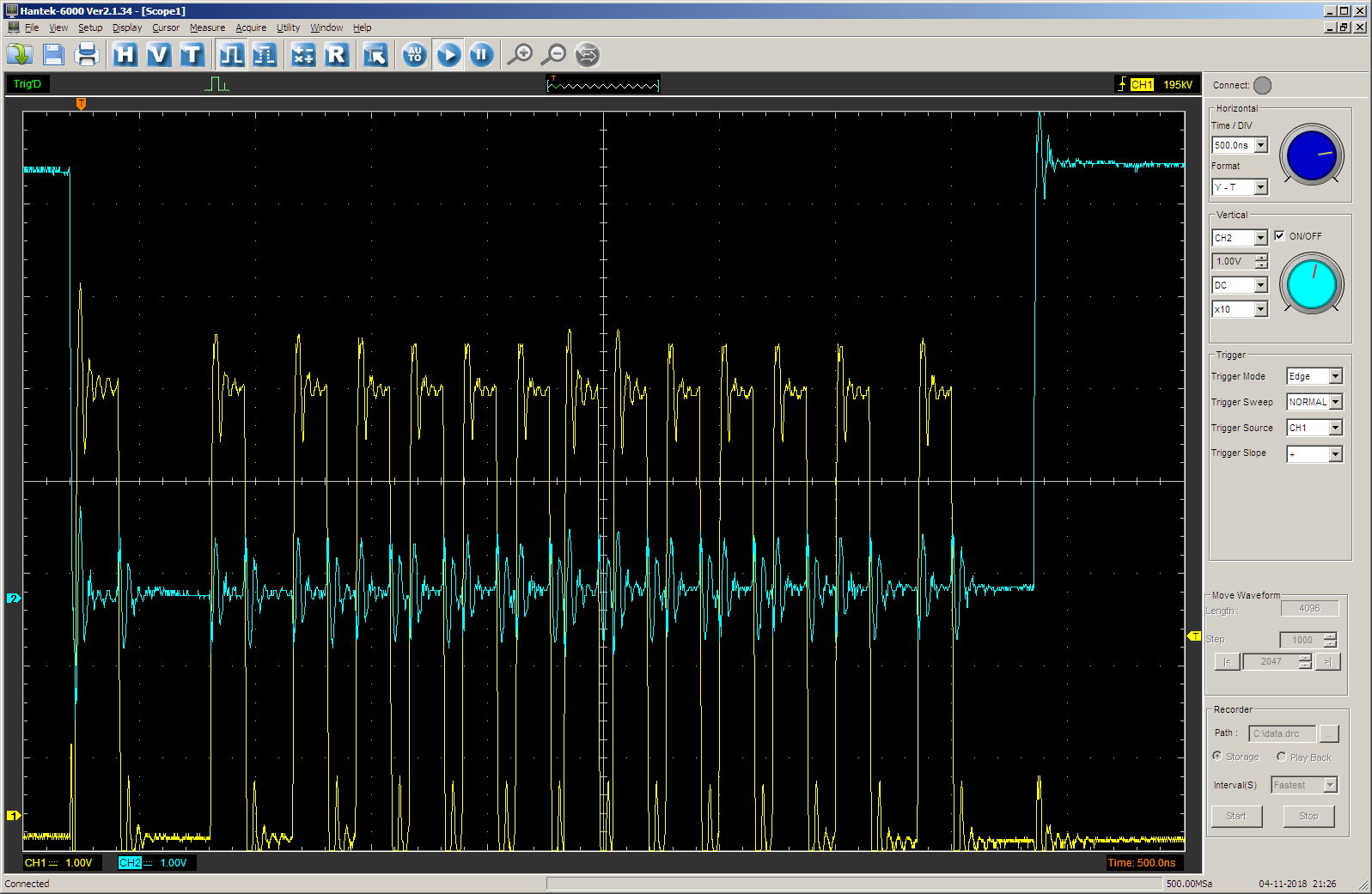
Auf dem Oszilloskop sehen wir Folgendes (gelber Strahl - STEP-Ausgang, blauer Wert des Zähler-TC-Ausgangs für die Prozesssteuerung). Die Pulsdauer wird durch das
Schrittarray eingestellt . Bei jedem Schritt beträgt die Dauer 0x1000 Takte.
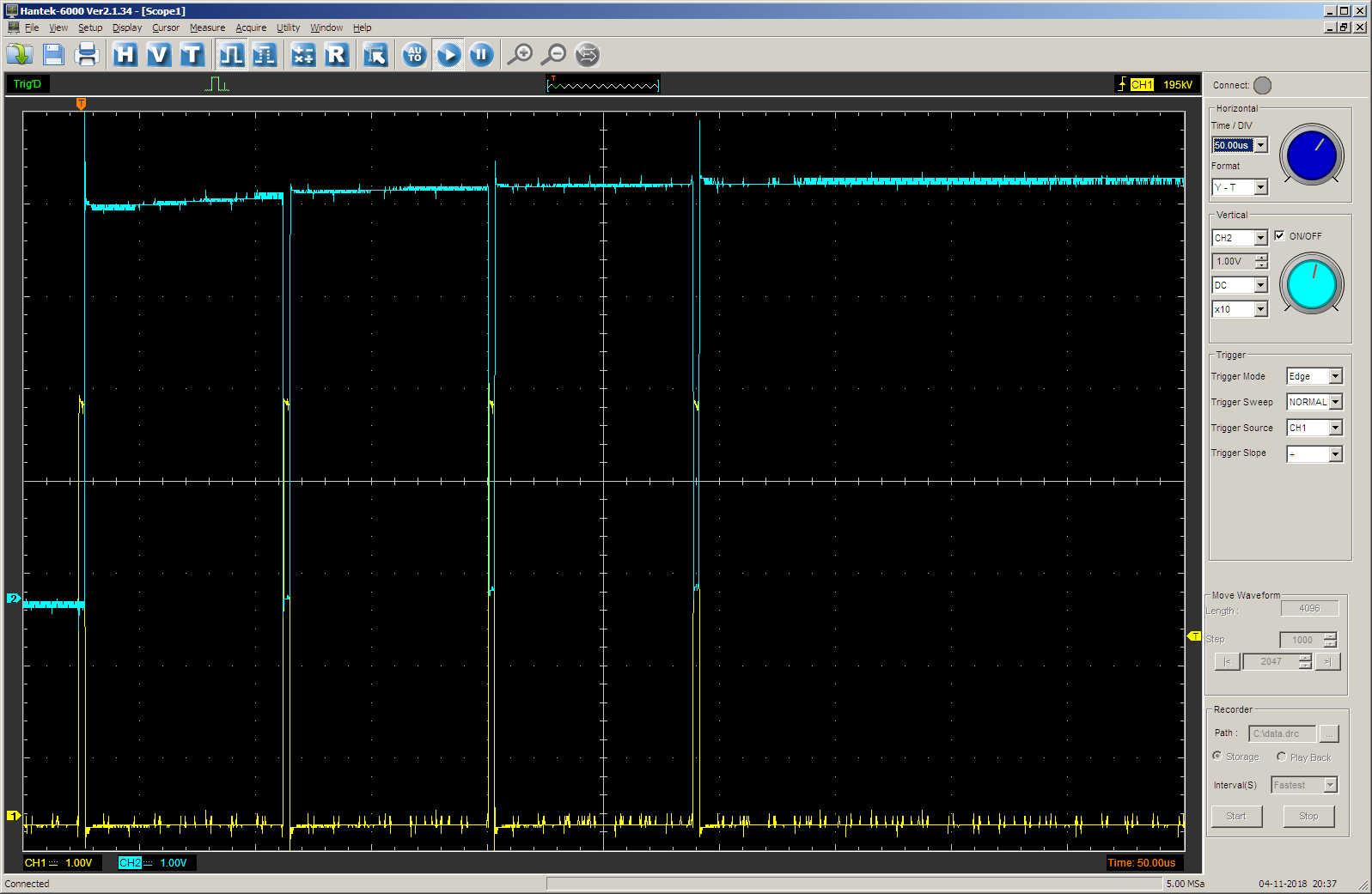
Wechseln Sie zu einem anderen Scan, damit verschiedene Ergebnisse kompatibel sind:
Ändern Sie den Funktionsaufruf in:
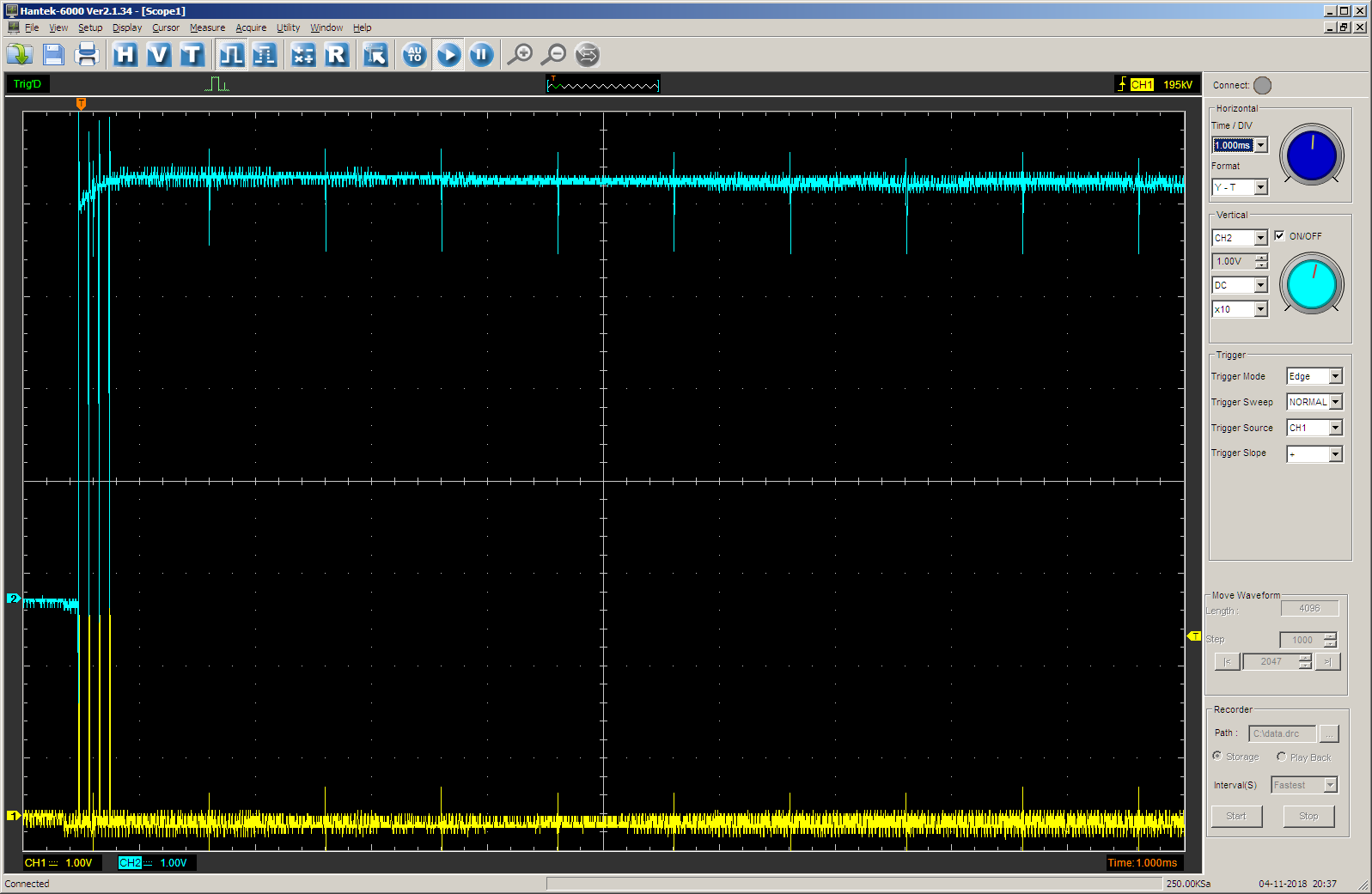
JustTest(1);
Das Ergebnis ist wie erwartet. Zuerst ist der TC-Ausgang für 0x1000 Zyklen Null, dann - eine Einheit für 0x10000 (65536d) Zyklen. Die Frequenz beträgt ungefähr 700 Hertz, wie wir im letzten Teil des Artikels herausgefunden haben, also ist alles richtig.

Nun, versuchen wir es mit einer Zwei:
JustTest(2);
Wir bekommen:
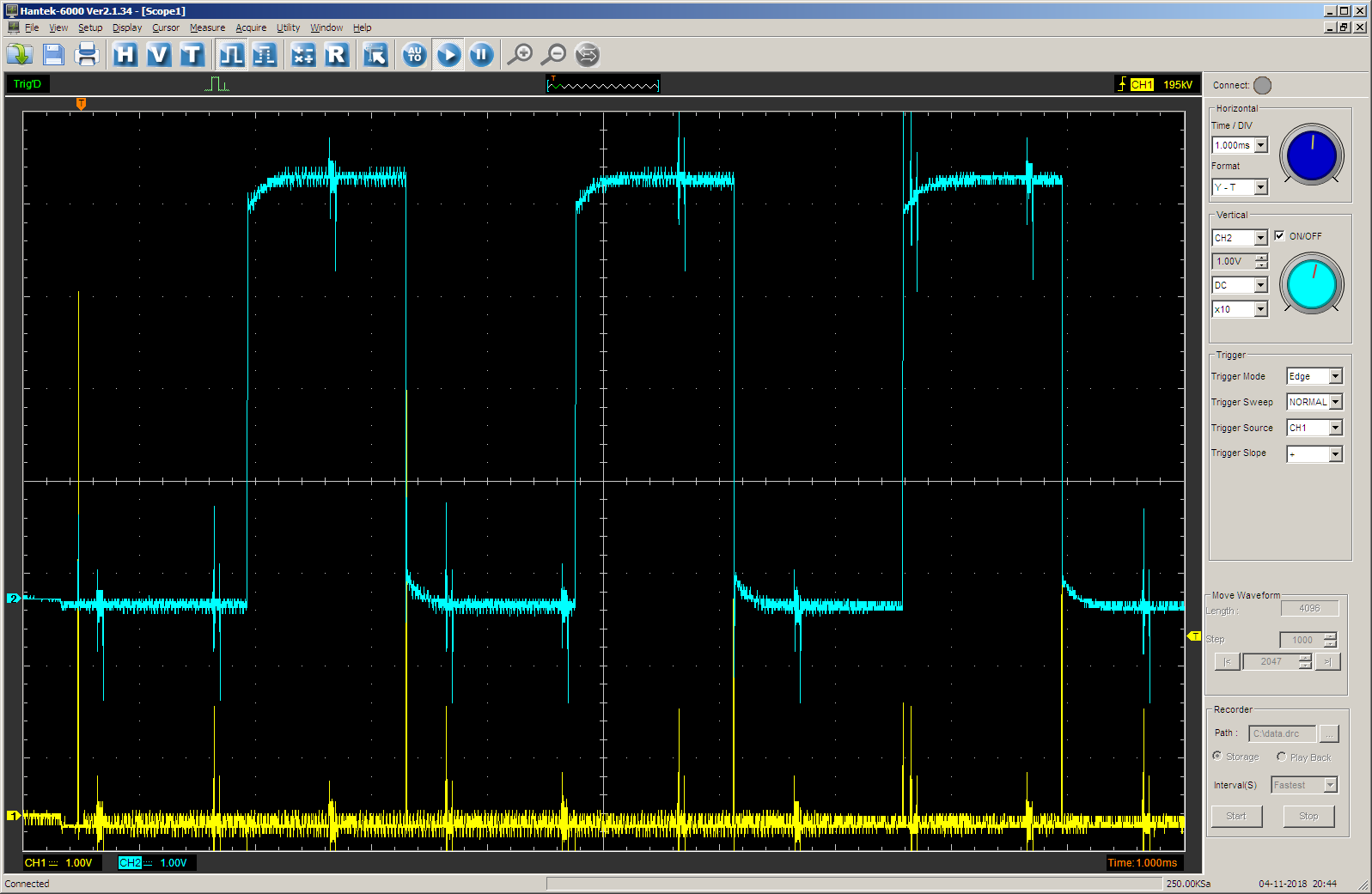
Alles ist richtig. Der TC-Ausgang wird in den letzten 65536-Taktzyklen auf eins gestellt. Davor war er für 0x1000 + 0x10000 Zyklen bei Null.
Bei diesem Ansatz sollten natürlich alle Impulse den gleichen Wert wie der neue Zähler haben. Es ist unmöglich, während der Beschleunigung einen Impuls mit dem höchsten Byte zu erzeugen, z. B. 3, dann 1, dann 0. Tatsächlich haben Beschleunigungen bei so niedrigen Frequenzen (weniger als siebenhundert Hertz) keine physikalische Bedeutung, daher kann dieses Problem vernachlässigt werden. Bei dieser Frequenz können Sie linear mit dem Motor arbeiten.
Fliege in die Salbe
Das TRM-Dokument für die PSoC5LP-Familie lautet:
Jede Transaktion kann zwischen 1 und 64 KB groß sein
Aber in der bereits erwähnten AN84810 gibt es einen solchen Satz:
1. Wie können Sie mit DMA mehr als 4095 Bytes puffern?
Die maximale Übertragungszahl eines TD ist auf 4095 Byte begrenzt. Wenn Sie mehr als 4095 Bytes über einen einzelnen DMA-Kanal übertragen müssen, verwenden Sie mehrere TDs und verketten Sie sie wie in Beispiel 5 gezeigt.
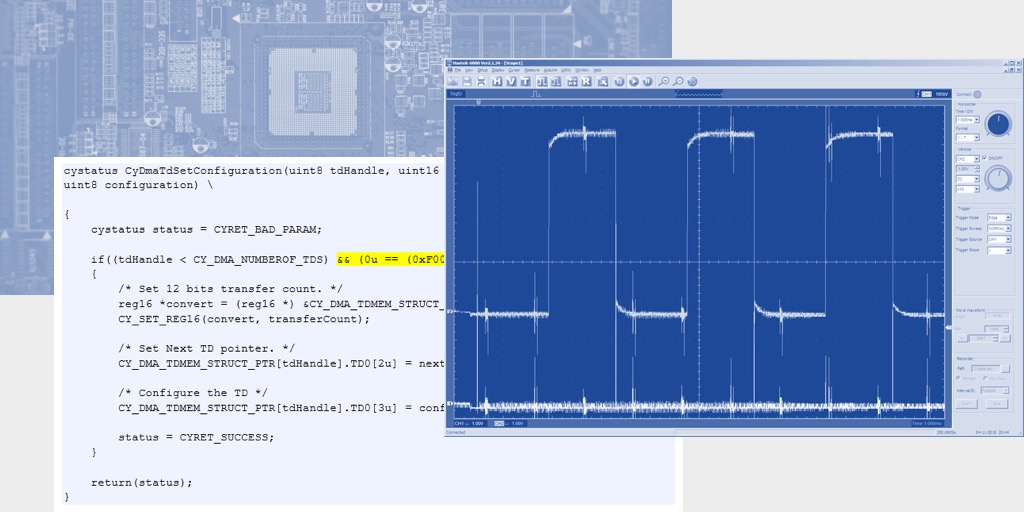
Wer hat recht? Wenn Sie Experimente durchführen, werden die Ergebnisse zugunsten der schlechtesten Aussagen geneigt sein, aber das Verhalten wird völlig unverständlich sein. Der ganze Fehler ist diese Überprüfung in der API:
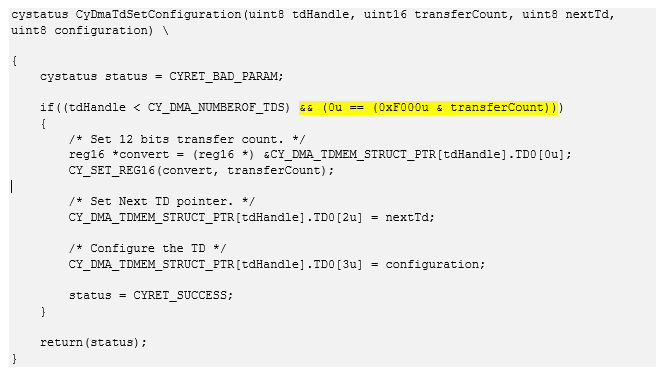
Gleicher Text. cystatus CyDmaTdSetConfiguration(uint8 tdHandle, uint16 transferCount, uint8 nextTd, uint8 configuration) \ { cystatus status = CYRET_BAD_PARAM; if((tdHandle < CY_DMA_NUMBEROF_TDS) && (0u == (0xF000u & transferCount))) { /* Set 12 bits transfer count. */ reg16 *convert = (reg16 *) &CY_DMA_TDMEM_STRUCT_PTR[tdHandle].TD0[0u]; CY_SET_REG16(convert, transferCount); /* Set Next TD pointer. */ CY_DMA_TDMEM_STRUCT_PTR[tdHandle].TD0[2u] = nextTd; /* Configure the TD */ CY_DMA_TDMEM_STRUCT_PTR[tdHandle].TD0[3u] = configuration; status = CYRET_SUCCESS; } return(status); }
Wenn eine Transaktion angegeben wird, die länger als 4095 Byte ist, wird die vorherige Einstellung verwendet. Ja, ich habe nicht daran gedacht, Fehlercodes zu überprüfen ...
Die Experimente haben gezeigt, dass, wenn Sie diese Prüfung entfernen, die tatsächliche Länge mit der Maske 0xfff (4096 = 0x1000) abgeschnitten wird. Ach und ah. Alle Hoffnungen auf einen angenehmen Job brachen zusammen. Sie können in 4K natürlich Ketten verwandter Deskriptoren erstellen. Aber zum Beispiel sind 64K 16 Ketten. Drei aktive Motoren (Extruder haben weniger Stufen) - 48 Ketten. Im schlimmsten Fall sollte vor jedem Segment genau so viel gefüllt werden. Vielleicht ist es rechtzeitig akzeptabel. Es stehen mindestens 127 Deskriptoren zur Verfügung, sodass auf jeden Fall genügend Speicher vorhanden ist.
Sie können die fehlenden Daten nach Bedarf senden. Es kam zu einer Unterbrechung, dass der DMA-Kanal die Arbeit abgeschlossen hatte. Wir übertragen ein weiteres Segment darauf. In diesem Fall sind keine Berechnungen erforderlich, das Segment ist bereits gebildet, alles wird schnell sein. Und es gibt keine Leistungsanforderungen: Wenn eine Interrupt-Anforderung ausgegeben wird, gibt es 4 weitere Elemente im FIFO, die jeweils für mehrere hundert oder sogar Tausende von Taktzyklen gewartet werden. Das heißt, alles ist real. Eine bestimmte Strategie lässt sich während der eigentlichen Arbeit leichter auswählen. Ein Fehler in der Dokumentation (TRM) trübte jedoch die ganze Stimmung. Wenn dies im Voraus bekannt wäre, hätte ich die Methodik vielleicht nicht überprüft.
Fazit
In der Erscheinung wurde das entwickelte Hilfs-Firmware-Tool akzeptabel, so dass auf seiner Grundlage eine Version der „Firmware“ erstellt werden kann, beispielsweise Marlin, die sich nicht ständig im Interrupt-Handler für Schrittmotoren befindet. Soweit ich weiß, gilt dies insbesondere für Delta-Drucker, bei denen der Bedarf an Computerressourcen recht hoch ist. Vielleicht wird dadurch der Zustrom beseitigt, der in meinem Delta an Stellen auftritt, an denen der Kopf stoppt. Auf dem MZ3D wird an denselben Stellen kein Zustrom beobachtet. Ob es wahr ist oder nicht, wird die Zeit zeigen, und der Bericht darüber muss in einer völlig anderen Filiale veröffentlicht werden.
In der Zwischenzeit haben wir gesehen, dass es auf dem UDB-Block trotz seiner Einfachheit durchaus möglich ist, einen Coprozessor zu implementieren, der zusammen mit dem Hauptprozessor arbeitet und das Entladen ermöglicht. Und wenn es viele dieser Einheiten gibt, können Coprozessoren parallel arbeiten.
Ein Fehler in der Dokumentation für den DMA-Controller hat das Ergebnis verwischt. Unterbrechungen sind dennoch erforderlich, jedoch nicht mit der gleichen Häufigkeit und nicht mit der zeitlichen Kritikalität, die in der Originalversion vorhanden war. Die Stimmung ist also verdorben, aber die Verwendung eines auf UDB basierenden „Coprozessors“ bringt im Vergleich zur reinen Softwarearbeit immer noch einen erheblichen Gewinn.
Auf dem Weg stellte sich heraus, dass DMA mit einer relativ geringen Geschwindigkeit arbeitet. Infolgedessen wurden einige Messungen sowohl am PSoC5LP als auch am STM32 durchgeführt. Die Ergebnisse ziehen einen anderen Artikel. Vielleicht mache ich es eines Tages, wenn sich das Thema als interessant herausstellt.
Als Ergebnis der Experimente wurden zwei Testprojekte gleichzeitig erhalten. Das erste ist leichter zu verstehen. Sie können es
hier nehmen . Der zweite wird vom ersten geerbt, aber beim Hinzufügen eines Sieben-Bit-Zählers und der zugehörigen Logik verwirrt. Sie können es
hier nehmen . Natürlich sind diese Beispiele nur Testbeispiele. Es ist noch keine Zeit zum Einbetten in die echte „Firmware“. Im Rahmen dieser Artikel ist es jedoch wichtiger, die Arbeit mit UDB zu üben.