Lassen Sie uns herausfinden, wie Sie aus Elektronik, die Sie zu Hause finden, einen ausreichend einfachen Laserprojektor herstellen können.
Einführung
Es gibt zwei Möglichkeiten, ein Bild mit einem Laser-Vektor-Scan und einem Raster-Scan zu erstellen.
Während des Vektorscannens bewegt sich der Laser entlang der Umrisse des Bildes und schaltet sich nur aus, während er sich von einem Umriss zum nächsten bewegt. Das bedeutet, dass der Laser die meiste Zeit eingeschaltet ist, was zu einem ziemlich hellen Ergebnis führt.
Diese Methode wird am häufigsten in industriellen Großlaserprojektoren verwendet, erfordert jedoch die Verwendung eines ziemlich komplexen elektromechanischen Geräts - des Galvanometers -, um den Laser schnell zu bewegen. Die Preise beginnen bei 80 USD pro Paar und es ist sehr unpraktisch (
obwohl möglich ), zu Hause zu machen.
Die zweite Methode ist das
Raster-Scannen . Dort bewegt sich der Laserstrahl von einer Seite zur anderen und zeichnet das Bild zeilenweise. Dies ist die Methode, die in alten CRT-Fernsehern und -Monitoren verwendet wird.
Da sowohl vertikale als auch horizontale Bewegungen wiederholt ausgeführt werden, ist ein viel einfacherer mechanischer Aufbau als beim Vektorscannen erforderlich. Da das Bild in separate Elemente unterteilt ist, ist es auch viel einfacher zu programmieren.
Der Hauptnachteil des Raster-Scannens besteht darin, dass der Strahl über jedes Element des Bildes fällt, auch über diejenigen, die nicht beleuchtet werden müssen, wodurch das Bild insgesamt dunkler wird. Aufgrund der Einfachheit habe ich diese Methode für meinen Laserprojektor gewählt.
Um den Laserstrahl entlang einer Linie (horizontal) zu bewegen, gibt es eine sehr bequeme Technik: Verwenden Sie einen Spiegel, der sich mit konstanter Geschwindigkeit dreht. Da die Rotation kontinuierlich ist, können Sie den Strahl sehr schnell bewegen. Es ist jedoch schwieriger, den Strahl auf eine andere Linie zu verschieben.
Am einfachsten ist es, mehrere Laser zu verwenden, die auf den rotierenden Spiegel gerichtet sind. Der Nachteil ist, dass die Anzahl der angezeigten Linien durch die Anzahl der verwendeten Laser bestimmt wird, was die Einrichtung komplizierter macht, und dass Sie einen ziemlich hohen Spiegel benötigen würden. Aber es gibt auch Vorteile - der einzige bewegliche Teil des gesamten Systems ist der Spiegel (weniger Material zum Zerbrechen), und die Verwendung mehrerer Laser kann das Bild heller machen.
Hier ist ein Beispiel eines so gebauten Projektors.
Eine andere im Internet häufig verwendete Scanmethode besteht darin, vertikale und horizontale Scans mithilfe einer sich drehenden Spiegeltrommel zu kombinieren, bei der separate „Facetten“ in unterschiedlichen Winkeln zur Drehachse angeordnet sind. Durch diese Spiegelkonfiguration wird der Laserstrahl beim Drehen des Spiegels in verschiedene vertikale Winkel reflektiert, wodurch ein vertikaler Scan erzeugt wird.
Obwohl der resultierende Projektor im Wesentlichen recht einfach ist (Sie benötigen nur einen Laser, einen Spiegel mit Motor und einen Synchronisationssensor), hat diese Methode einen großen Nachteil: Es ist sehr schwierig, zu Hause einen facettenreichen Spiegel zu bauen. Normalerweise sollte die Neigung der „Facetten“ während der Konstruktion perfekt eingestellt werden, und die erforderliche Präzision ist wahnsinnig hoch.
Hier ist ein Beispiel für einen solchen Projektor.Um es mir einfacher zu machen, habe ich eine andere Scanmethode verwendet - einen ständig rotierenden Spiegel, um den horizontalen Scan zu bilden, und einen periodisch oszillierenden Spiegel für den vertikalen Scan.
Realisierung
Horizontaler Scan
Wo finden Sie einen schnell rotierenden Spiegel? Natürlich in einem alten Laserdrucker! Laserdrucker verwenden einen polygonalen Spiegel, der auf einem bürstenlosen Motor angebracht ist, um den Laserstrahl entlang des Papiers abzutasten. Der Motor befindet sich normalerweise auf der Leiterplatte, die ihn steuert.
Ich hatte bereits ein Spiegelmodul von einem alten Drucker:
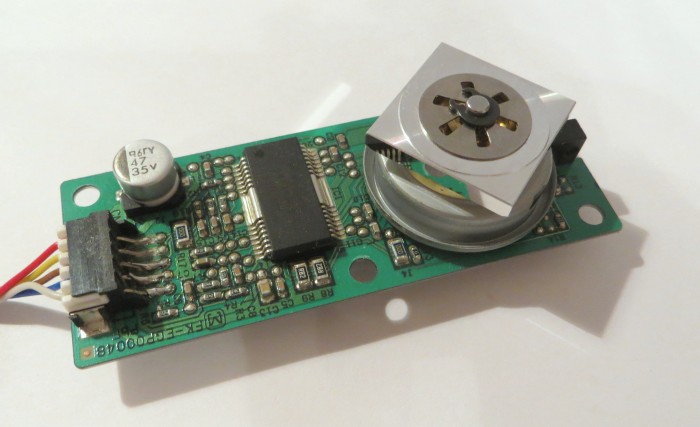
Ich konnte keine Dokumentation für das Modul oder den darin enthaltenen Chip finden. Um das Pin-Layout des Moduls zu bestimmen, musste ich es zurückentwickeln. Stromleitungen sind leicht zu lokalisieren - sie sind mit dem einzigen Elektrolytkondensator auf der Leiterplatte verbunden. Es reicht jedoch nicht aus, den Motor nur mit Strom zu versorgen, um ihn zum Drehen zu bringen. Sie müssen auch ein Taktsignal liefern, um die Drehzahl einzustellen. Das Signal ist ein einfacher Mäander der Frequenz von 20 bis 500-1000 Hz.
Um die richtige Leitung zu finden, nahm ich einen für 100 Hz konfigurierten Impulsgenerator und verband ihn (über einen Widerstand) mit jeder verfügbaren Leitung des Lasermodulanschlusses. Sobald das Signal an die richtige Leitung geliefert wird, dreht sich der Motor. Der Spiegel dreht sich für unsere Zwecke sehr schnell - wie später gemessen, dreht er sich mit einer Geschwindigkeit von über 250 U / min. Aber leider machte die Motordrehung es ziemlich laut. Es ist kein Problem für meine Experimente, würde sich aber sicherlich bemerkbar machen, wenn der Projektor fertig ist und funktioniert. Möglicherweise könnte dies durch die Verwendung eines neueren Spiegelmoduls oder durch einfaches Einlegen des Moduls in eine Box gemildert werden.
Laser
Für Vorversuche habe ich einen Laser von einem billigen Laserpointer verwendet. Das Modul sollte so eingerichtet sein, dass es mehrere Freiheitsgrade hat - um den Laser korrekt auf den Spiegel zu richten.
Da wir Raster-Scannen verwenden, wird Laserlicht über den gesamten Bildbereich verteilt, wodurch das Bild ziemlich dunkel wird - es ist nur im Dunkeln sichtbar.
Viel später, nachdem ich erfolgreich ein Bild gezeichnet hatte, ersetzte ich das Lasermodul durch ein leistungsfähigeres - die Laserdiode eines DVD-Players.
Achtung: DVD-Laser sind sehr gefährlich und können Sie blenden! Verwenden Sie während der Arbeit mit dem Laser immer eine Schutzbrille!
Sowohl das Laser- als auch das polygonale Spiegelmodul wurden auf eine kleine Holzplanke gesetzt. Nachdem Sie dem Motor das Taktsignal und dem Laser Strom zugeführt haben, sollten Sie den Laser so ausrichten, dass der Strahl auf die Kanten des Spiegels trifft. Während sich der Spiegel dreht, erhalten Sie eine lange horizontale Linie.
Synchronisations-Fotosensor
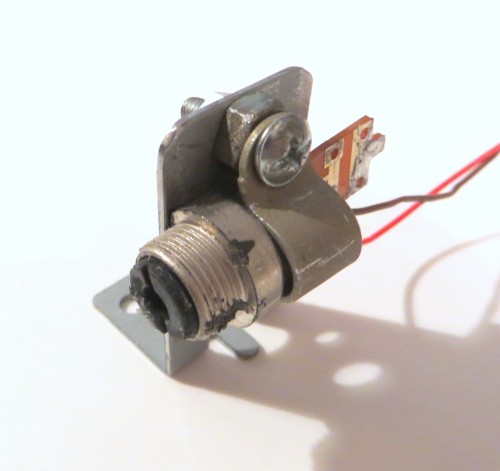
Damit der Mikrocontroller die Position eines sich bewegenden Laserstrahls verfolgen kann, benötigen wir einen Photosensor. Aber zu diesem Zweck habe ich eine Fotodiode verwendet, die mit einem Stück Pappe mit einem kleinen Loch in der Mitte blockiert ist. Es wird benötigt, um den Moment, in dem der Strahl auf die Fotodiode trifft, genauer zu verfolgen.
Hier ist das Montagesystem für die Fotodiode (ohne Karton):

Während des normalen Betriebs sollte der reflektierte Laserstrahl zuerst auf die Fotodiode und erst dann auf den vertikalen Scanspiegel treffen.
Nach der Installation des Sensors habe ich ihn getestet, indem ich Spannung über den Widerstand geliefert und das Signal mit einem Oszilloskop beobachtet habe. Seine Amplitude reichte aus, um den Sensor direkt mit dem GPIO-Eingang des Mikrocontrollers zu verbinden.
Vertikaler Scan
Wie ich bereits erwähnt habe, habe ich einen periodisch oszillierenden Spiegel verwendet, um den vertikalen Scan zu erstellen. Wie fährst du damit? Am einfachsten ist es, einen Elektromagneten zu verwenden. Manchmal montieren die Leute die Spiegel einfach auf Computerlautsprechern, aber dies ist keine besonders wünschenswerte Option (die Ergebnisse sind inkonsistent und zu schwer zu kalibrieren).
In meinem Build habe ich den BLDC-Motor eines DVD-Players verwendet, um den vertikalen Scanspiegel zu steuern. Da der Projektor für die Textausgabe vorgesehen war, mussten nicht viele Linien gezeichnet werden, sodass der Spiegel nur leicht abgewinkelt sein sollte.
Der BLDC-Motor besteht aus drei Spulen, die zusammen einen Stator bilden. Wenn eine der Spulen an eine positiv geladene Stromquelle angeschlossen ist und die anderen beiden abwechselnd mit der negativ geladenen Quelle verbunden sind, würde der Rotor des Motors wackeln. Der maximale Winkeldurchlauf wird durch die Motorkonfiguration bestimmt, insbesondere durch die Anzahl der Pole. Bei einem DVD-Motor werden 30 Grad nicht überschritten. Da dieser Motor sehr leistungsstark und einfach zu steuern ist (nur zwei Tasten sind erforderlich), eignet sich dieser Motor sehr gut für unseren Zweck, einen Textlaserprojektor zu bauen.
So sieht der Motor mit angeschlossenem Spiegel aus:

Beachten Sie, dass sich die reflektierende Oberfläche des Spiegels auf der Vorderseite befinden sollte - das heißt, sie wird nicht durch Glas behindert.
Übersicht
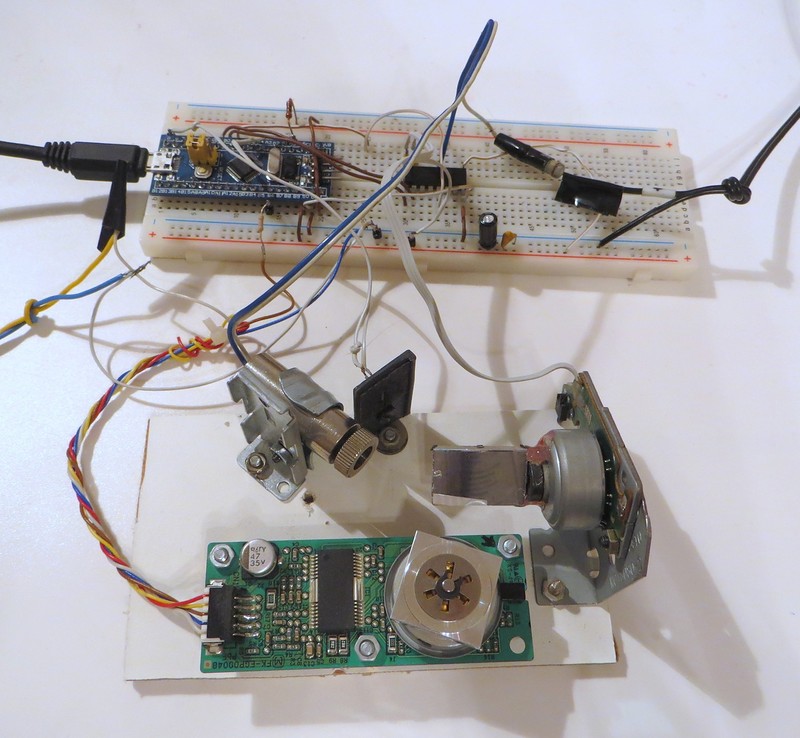
So sieht der Projektor zusammengebaut aus:
Das Projektionsmodul aus nächster Nähe:
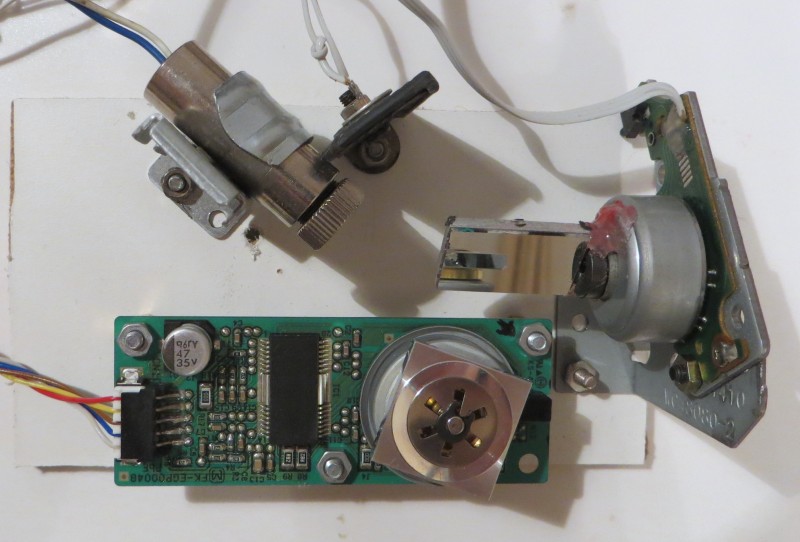
Der polygonale Spiegel bewegt sich im Uhrzeigersinn, sodass sich der Laserstrahl von links nach rechts bewegt.
Die leistungsstarke DVD-Laserdiode ist bereits installiert (im Kollimator). Der vertikale Scanspiegel ist so eingerichtet, dass das projizierte Bild nach oben zeigt - in meinem Fall zur Decke meines Zimmers.
Wie Sie auf dem Bild sehen können, werden der Laser und die mechanischen Teile des Projektors vom STM32F103-Mikrocontroller gesteuert, der auf einem kleinen Debugging-Board (Blue Pill) installiert ist. Dieses Board ist im Steckbrett installiert.
Geräteschema:
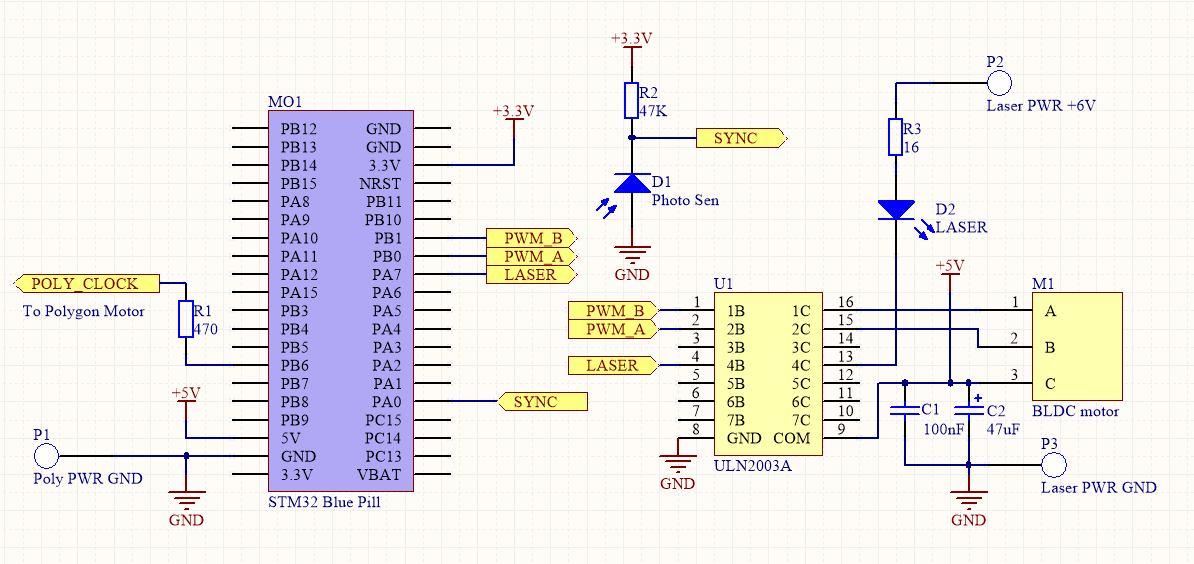
Wie bereits erwähnt, benötigen wir zur Steuerung des polygonalen Spiegelmotors nur ein Signal - das Taktsignal (POLY_CLOCK), das von einem der im PWM-Modus arbeitenden STM32-Timer erzeugt wird. Die Frequenz und das Tastverhältnis bleiben unverändert, während der Projektor arbeitet. Zur Stromversorgung des Motors verwende ich ein separates 12V Netzteil.
Die zwei PWM-Signale zur Steuerung des vertikalen Abtastspiegels werden von einem anderen Zeitgeber des Mikrocontrollers erzeugt. Diese Signale werden über einen ULN2003A-Chip übertragen, der den DVD-Motor steuert. Durch Einstellen unterschiedlicher Tastverhältnisse für PWM-Kanäle dieser Zeit können wir den Drehwinkel des Motors ändern.
Leider bietet die aktuelle Version des Projektors keine Rückmeldung zur Position des Spiegels. Dies bedeutet, dass der Mikrocontroller die Spiegel ansteuern kann, aber die aktuelle Position nicht "kennt". Die Rotorträgheit und die Spuleninduktivität erzeugen einige Verzögerungen beim Ändern der Drehrichtung.
Dank alledem gibt es zwei Hauptfolgen:
- Die Liniendichte ist nicht konstant, da die Spiegeldrehzahl nicht gesteuert werden kann.
- Viele Leitungen sind nicht betriebsbereit. Der vertikale Scanspiegel schwankt in Zyklen, sodass einige der Zeilen verkehrt herum und die anderen verkehrt herum ausgegeben werden können. Da wir die Position nicht verfolgen können, können Linien nur angezeigt werden, wenn sich der Motor auf eine bestimmte Weise dreht. Da nur die Hälfte der Linien angezeigt wird, halbiert sich die Helligkeit des Bildes.
Aufgrund des fehlenden Feedbacks ist das Gerät jedoch recht einfach zu bauen.
Der Prozess der Bilderzeugung ist ebenfalls recht einfach:
- Jedes Mal, wenn der Laserstrahl auf die Fotodiode trifft, erzeugt der Mikrocontroller einen Interrupt. Bei diesem Interrupt wird die aktuelle horizontale Abtastgeschwindigkeit von der MCU berechnet. Danach wird der spezielle Synchronisations-Timer zurückgesetzt.
- Dieser Synchronisationszeitgeber erzeugt zu bestimmten Zeitpunkten während des horizontalen Scans seine eigenen Interrupts.
- Insbesondere muss einige Zeit nach der Synchronisation das Lasersteuersignal gebildet werden. Mein Gerät bildet es mit einer DMA + SPI-Kombination. Im Wesentlichen übertragen diese Module eine Bildzeile am MOSI SPI-Ausgang zur richtigen Zeit, Bit für Bit.
- Nachdem die Bildausgabe beendet ist, sollte der Laser wieder eingeschaltet werden, damit die Fotodiode ihren Strahl wieder aufnehmen kann.
Die Lasermodulation erfolgt über einen der Schlüssel des ULN2003A-Chips. Der R3-Widerstand wird benötigt, um die Laserdiode vor Überstrom zu schützen. Es wird direkt am Ende des Laserkabels isoliert installiert. Zur Stromversorgung des Lasers habe ich ein Außenborder
-Netzteil verwendet . Es ist wichtig, den Laserstromverbrauch zu steuern und sicherzustellen, dass er innerhalb des für die jeweilige Laserdiode akzeptablen Bereichs liegt.
Beispiel eines Bildes (8 Zeilen hoch):
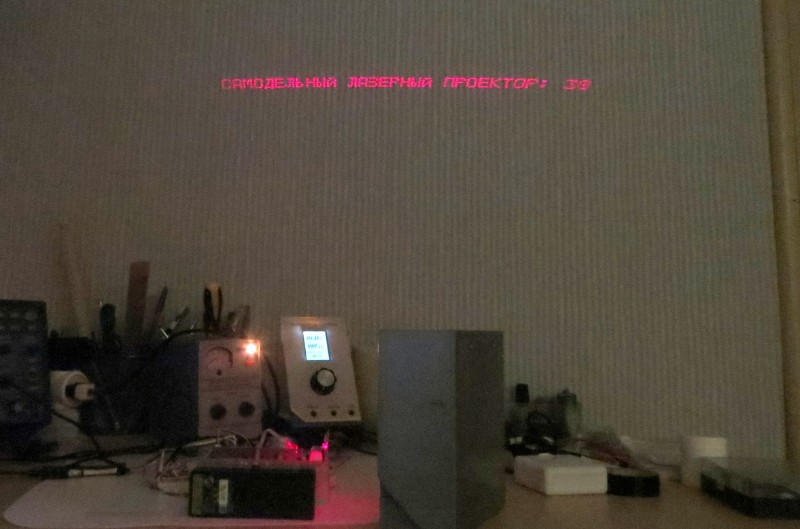
Der Text ist etwas unproportional, da der Projektor schräg auf eine Wand zeigt. Derzeit ist jeder vertikale Abtastzyklus 32 Schritte lang (1 Schritt bedeutet, dass der polygonale Spiegel um eine Kante gedreht wird).
Der Projektor kann 14 verschiedene Linien anzeigen: Alles danach beginnt sich mit anderen Linien zu vermischen, wodurch das Bild beschädigt wird.
Das Foto am Anfang verwendet auch eine 8-zeilige Schriftart, die es ermöglicht, auch zwei Textzeilen etwas gut anzuzeigen.
Die Schriftarten 11x7 und 6x4 werden auch im Code unterstützt:

Beispiel für "laufenden Text":
Das Video lässt das Bild vertikal flackern, ist aber in der Realität nicht sichtbar.
Projekt auf GitHub.