Die Automobilindustrie befindet sich derzeit in einer Revolution im autonomen Fahren. Ein unbemanntes Fahrzeug kann den Fahrgästen ein höheres Maß an Sicherheit bieten, da bei seinem Management der menschliche Faktor nicht berücksichtigt wird. Der weit verbreitete Einsatz unbemannter Fahrzeuge in der Zukunft wird die Anzahl der Unfälle verringern und außerdem die Zeit sparen, die die Menschen täglich mit dem Fahren verbringen.
OSCAR (Open-Source CAR) ist ein Forschungsprojekt des unbemannten Open-Source-Fahrzeugs StarLine, das die besten Ingenieure Russlands vereint. Wir haben die OSCAR-Plattform angerufen, weil wir jede Codezeile in Bezug auf das Auto für die Community zugänglich machen möchten.

Plattformanatomie
Als Benutzer des Fahrzeugs möchte der Autobesitzer sicher, bequem und pünktlich von Punkt A nach Punkt B gelangen. User Stories sind vielfältig und reichen von einem Ausflug zur Arbeit oder zum Einkaufen bis hin zum Abhängen mit Freunden oder der Familie, ohne ständig die Straße im Auge behalten zu müssen.
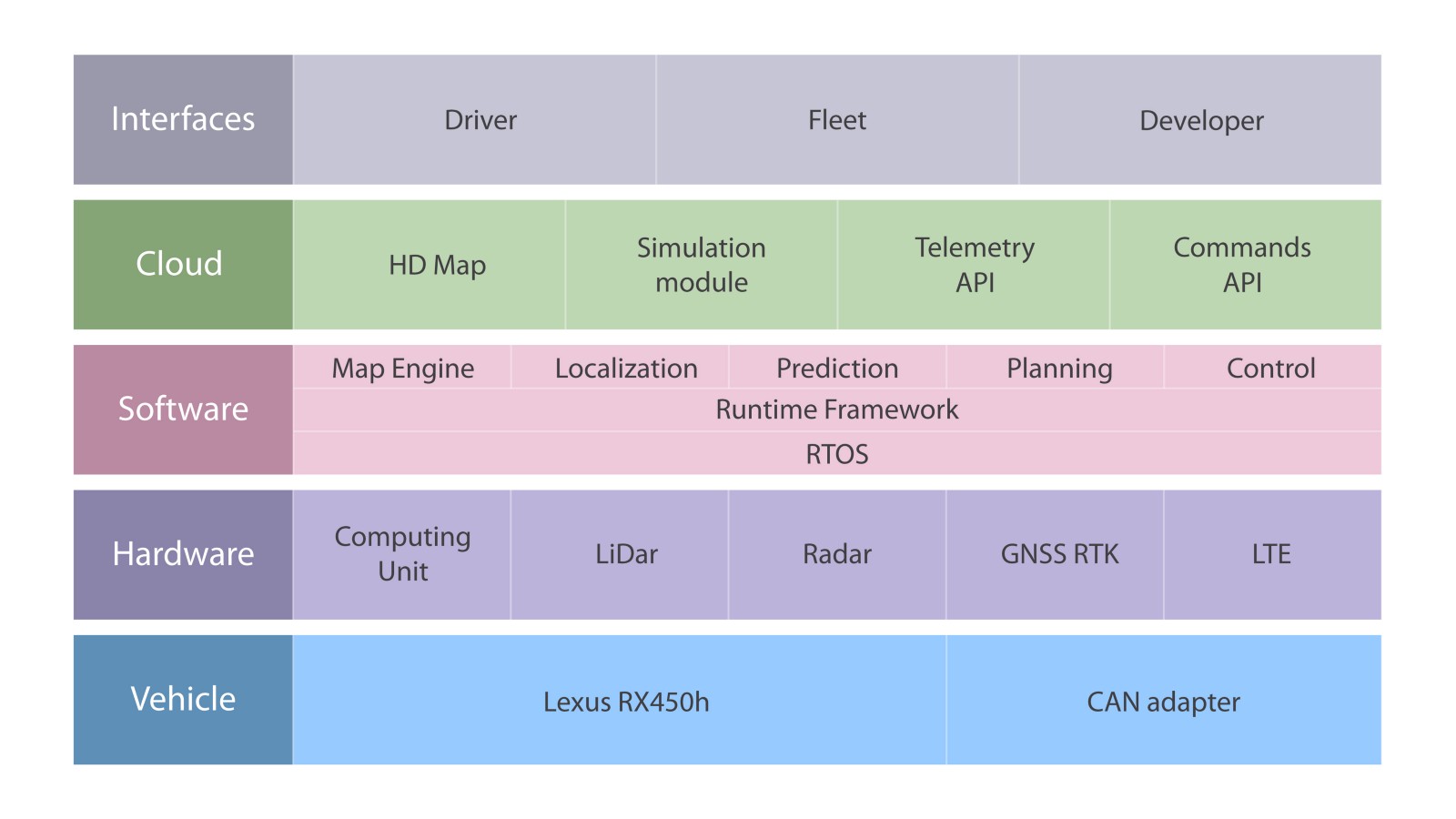
Daher sind Benutzeranwendungen und -umgebungen die höchste Ebene der Plattform. Wir stützen uns auf drei Benutzergruppen: einzelne Benutzer, kommerzielle sowie Plattformentwickler. Für jede dieser Gruppen entwerfen wir heute eine separate Schnittstelle. Die zweite Ebene ist der Serverteil, der hochauflösende Karten, ein Simulationsmodul sowie APIs für das Auto enthält. Die Software-Ebene ist die Erstellung von Programmen, die in das Auto eingebaut werden. Die beiden unteren Ebenen der Plattform sind Arbeiten am Auto selbst, bei denen die digitale Schnittstelle der Maschine selbst untersucht und Geräte installiert werden.
Auto
Ein modernes Auto kann bis zu 70 elektronische Steuergeräte für verschiedene Subsysteme haben. Normalerweise ist das Motorsteuergerät der leistungsstärkste Prozessor, während andere zur Steuerung des Getriebes, der Airbags, des Antiblockiersystems, der Audiosysteme und der Spiegeleinstellung verwendet werden. Einige von ihnen bilden unabhängige Subsysteme, während andere Informationen und Befehle untereinander austauschen.
Um die Kommunikation zwischen Fahrzeuggeräten sicherzustellen, wurde der CAN-Standard entwickelt.
CAN-Bus ist ein industrieller Netzwerkstandard sowie ein digitales Kommunikationssystem und die Steuerung elektrischer Geräte eines Autos. Fahrzeuggeräte werden parallel an den CAN-Bus angeschlossen, um Daten zu senden und zu empfangen. Mit Zugriff auf diese digitale Schnittstelle können Sie beispielsweise den Motor einschalten, Türen öffnen und die Autospiegel mithilfe von Steuerbefehlen zusammenklappen.
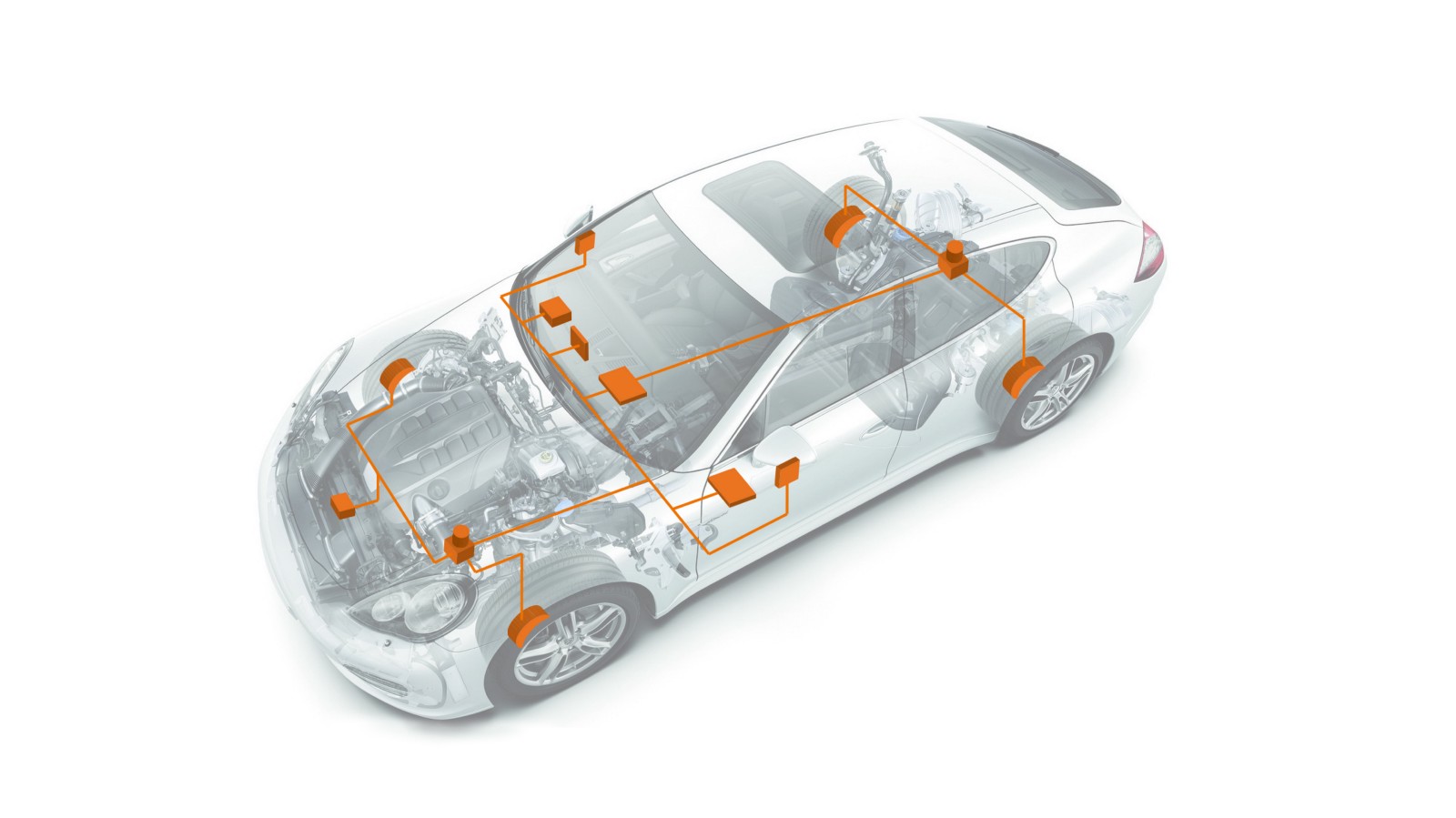
Um die Beschleunigung und Lenkung des Autos zu steuern, mussten wir auf den CAN-Bus zugreifen und die entsprechenden Pakettypen verstehen. NPO StarLine ist ein Hersteller von elektronischen Geräten, daher haben wir unseren eigenen CAN-Bus-Adapter entwickelt.

Derzeit können wir mit einem Laptop lenken, bremsen und beschleunigen.

Ausrüstung
Ein wichtiger Arbeitsbereich ist die Ausstattung des Fahrzeugs mit Sensoren und Sensoren. Es gibt eine Reihe von Ansätzen zur Ausstattung eines unbemannten Fahrzeugs. Beispielsweise verwenden einige Unternehmen teure Lidars, während andere sie ablehnen und sich auf die Messwerte anderer Geräte beschränken.

Jetzt ist das unbemannte StarLine-Auto mit mehreren Mono- und Fernglas-Kameras, Radargeräten, Lidars sowie Satellitennavigation ausgestattet.
Die Aufgabe des GPS-Empfängers besteht darin, seinen Standort im Raum sowie die genaue Zeit zu bestimmen. Zivile GPS-Empfänger haben eine unzureichende Genauigkeit für die Positionierung eines unbemannten Fahrzeugs, der Fehler kann bis zu mehreren Metern betragen. Dies geschieht sowohl aufgrund der Rückreflexion des Signals von den Wänden von Gebäuden in einer städtischen Umgebung als auch aufgrund schlecht vorhergesagter natürlicher Faktoren, beispielsweise Änderungen der Geschwindigkeit eines Signals von einem Satelliten in der Ionosphäre der Erde.
Für die Positionierung eines unbemannten Fahrzeugs ist der Fehler des zivilen GPS-Empfängers zu groß. Daher verwenden wir in unserer Entwicklung eine ultrapräzise Satellitennavigation. Zu diesem Zweck wurde am Fahrzeug ein GNSS-RTK-Empfänger installiert, der fortschrittlichere Positioniertechniken verwendet und somit nur durch Satellitennavigation eine Zentimeterpositionierungsgenauigkeit erreicht.
Während der Fahrt kann das Auto jedoch in einem Tunnel oder unter einer Brücke landen, wo die Signale von Satelliten zu schwach sind oder überhaupt nicht vorhanden sind. Aus diesem Grund sinkt die Genauigkeit des GNSS-RTK-Empfängers oder eine Positionierung ist völlig unmöglich. In diesen Fällen verfeinert das Auto seine Position anhand der Messwerte des Kilometerzählers und des Beschleunigungsmessers. Algorithmen, die Daten aus verschiedenen Quellen kombinieren, um die Unsicherheit zu verringern, werden als Sensorfusionsalgorithmen bezeichnet.
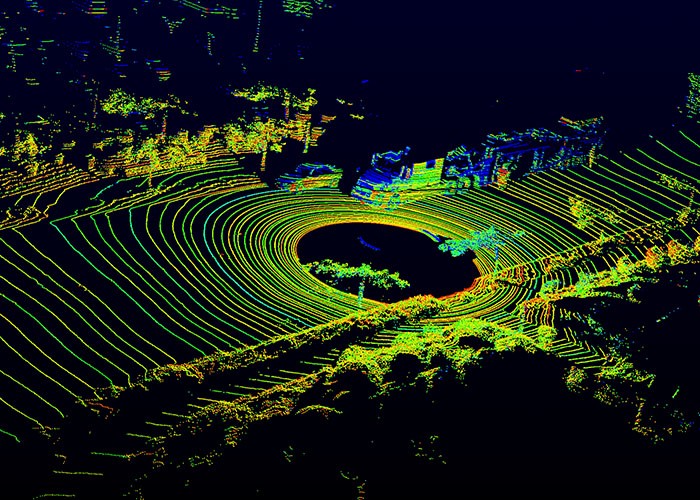
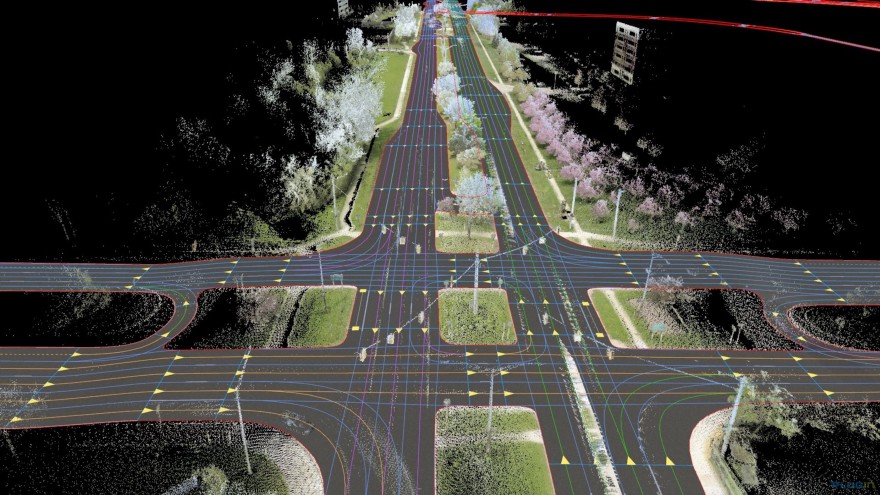
Neben der Aufgabe, ein unbemanntes Fahrzeug zu lokalisieren, müssen Sie auch eine Vorstellung von dynamischen Hindernissen haben, die sich nicht auf der Karte befinden, z. B. Autos, die sich in der Nähe bewegen, oder Personen, die eine Straße überqueren. Für diese Zwecke verwendet ein unbemanntes Fahrzeug Radar- und Lidardaten. Das Radar erkennt mithilfe von Funkwellen Hindernisse und kann dank des Doppler-Effekts auch deren Radialgeschwindigkeiten berechnen. Lidar ist ein aktiver optischer Entfernungsmesser, der ständig den umgebenden Raum abtastet und seine dreidimensionale Karte bildet, die sogenannte Punktwolke.
Jedes Gerät, das in einem unbemannten Fahrzeug verwendet wird (von der Kamera bis zur RTK GNSS-Einheit), muss konfiguriert werden, bevor es installiert werden kann.
Software
Im größten Maßstab besteht die Drohnen-Software aus mehreren Modulen, darunter: Erkennung, Planung, Lokalisierung und Steuerung.
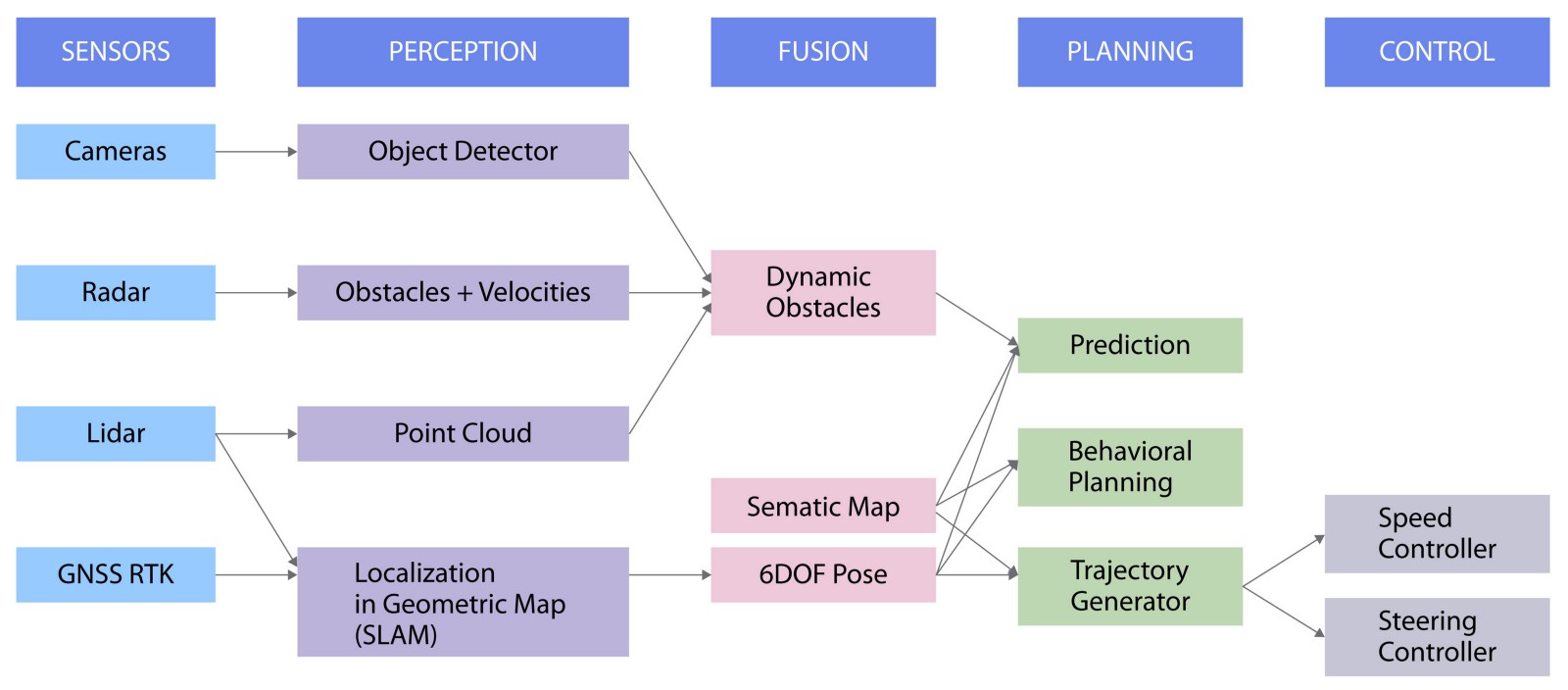
Daten von Kameras werden verwendet, um Objekte zu erkennen und zu erkennen, Radargeräte empfangen die Koordinaten und Geschwindigkeiten der umgebenden Objekte, Lidars stellen einen Punktwolkenalgorithmus bereit und das GNSS RTK-Modul verwendet Satellitendaten, um das Auto zu lokalisieren.
Anschließend werden die Daten aus den ersten drei Quellen kombiniert, um Informationen zu Hindernissen in der Nähe des Fahrzeugs zu erhalten.
Gleichzeitig werden sowohl Satelliten- als auch Lidar-Messwerte verwendet, um das SLAM-Problem zu lösen, was eine gleichzeitige Lokalisierung und Kartierung des Geländes bedeutet. Dies ist ein Ansatz zum Erstellen einer Karte einer unbekannten Umgebung mit Verfolgung der Position eines Objekts darin. Diese Informationen werden verwendet, um die 6 Koordinaten des Fahrzeugs zu berechnen, einschließlich drei Raumkoordinaten und dreidimensionaler Geschwindigkeit.
Der nächste Schritt ist die Planung der lokalen Flugbahn des Fahrzeugs. Der letzte Schritt ist das Steuermodul, mit dem die während des Gleisbaus erstellte Flugbahn tatsächlich ausgeführt wird.
Derzeit sind wir mit der Einrichtung und Installation von Geräten beschäftigt und arbeiten auch an einem Fahrzeugsteuerungsmodul.
Wolke
Der Serverteil besteht aus vier Blöcken:
- HD-Karten
- Telemetrie-API
- Befehls-API
- Simulationsmodul
Erstens benötigen wir einen Speicher für Karten, um das Auto korrekt zu lokalisieren, sowie einen Telemetriedienst für die Datenanalyse. Dies ist unser frühes Serverarchitekturdiagramm, das zwei Blöcke enthält. Später werden wir es mithilfe der Befehls-API erweitern, um Steuerbefehle vom Server an das Auto senden zu können. Wir werden auch ein Simulationsmodul hinzufügen.
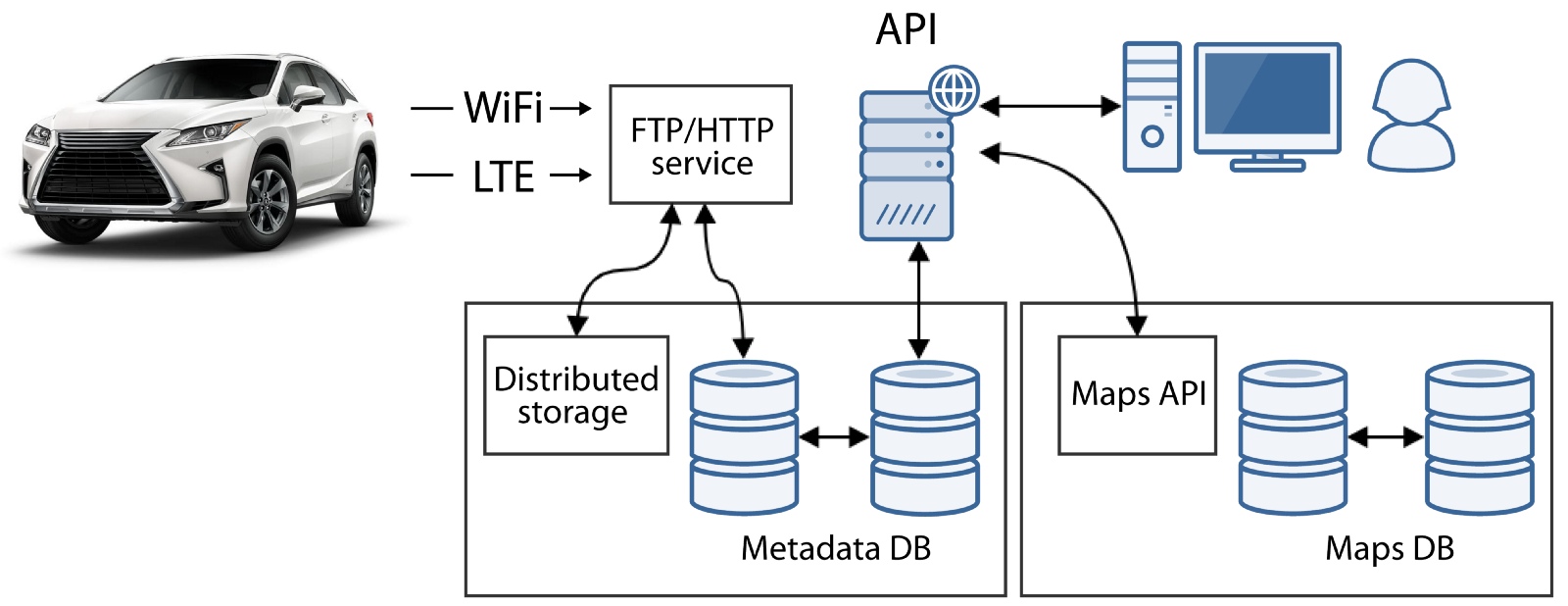
HD-Karten sind Karten, die eine vollständige Ansicht der realen Welt auf den nächsten Zentimeter genau bieten, einschließlich aller Informationen zur Straßeninfrastruktur, z. B. Informationen zu Fahrspuren, Schildern und Ampeln. Die Karte kann auch Lidar-Daten enthalten, damit sich die Drohne darauf lokalisieren kann.
Simulatoren werden benötigt, um Verkehrssituationen zum Debuggen und Testen zu generieren. Durch die Simulation von Verkehrssituationen können wir die Robustheit unserer Algorithmen erhöhen, indem wir Unit-Tests an einer beliebigen Anzahl von Kilometern anpassbarer Szenarien und seltener Bedingungen für einen Bruchteil der Zeit und Kosten durchführen, die für Tests auf realen Straßen erforderlich wären.

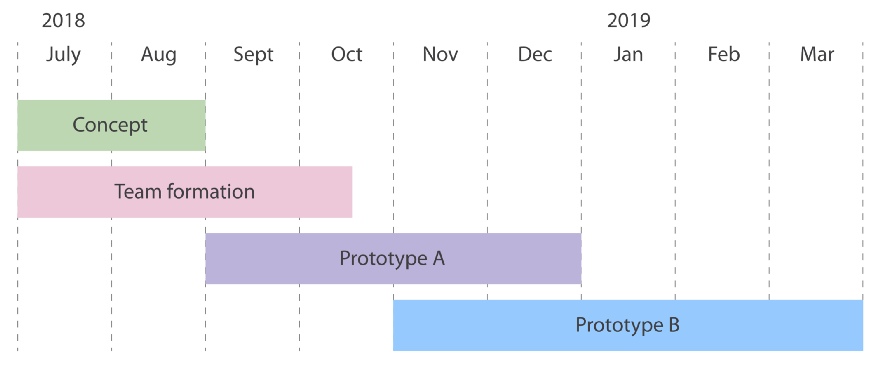
Roadmap
Im Juli haben wir mit der Entwicklung eines Konzepts begonnen, ein Team gebildet und den Weg zum Prototyp A eingeschlagen. Der Prototyp A ist ein Auto, das sich entlang von Wegpunkten bewegen kann, jedoch Eingriffe des Bedieners erfordert, um Hindernissen auszuweichen. Der Prototyp B, dessen Entwicklung wir bis zum Frühjahr 2019 abschließen wollen, ist ein Auto, das Hindernisse ohne Kontrolle des Fahrers umgehen kann.
Was hat eine Drohne in ihrem Herzen?
Das Auto basiert auf fortschrittlichen Algorithmen, Datenströmen, Hochleistungsschnittstellen und hochentwickelter Ausstattung. Darüber hinaus benötigt das Auto nicht nur Hardware und Software, sondern auch Server- und Clientanwendungen. Dieses technologische Herz ist offen und wir verlassen uns nicht nur auf die Initiative des StarLine-Teams, sondern auch auf die Hilfe der Open-Source-Community.
Das Hauptziel des unbemannten StarLine-Fahrzeugs ist der Wunsch, das Leben der Menschen komfortabler und sicherer zu gestalten. Technologie ist für uns wichtig, aber wir glauben, dass technologische und wissenschaftliche Erkenntnisse vorhanden sind, um Menschen zu dienen, und dies ist das wahre Herzstück unserer Bemühungen. Wir nähern uns dem Tag, an dem die Verkehrssicherheit durch Ausrüstung gewährleistet wird und die Menschen die Möglichkeit haben, mehr Zeit für das zu investieren, was ihnen wichtig ist. Und wenn Sie unsere Sichtweise teilen, freuen wir uns, Sie einzuladen, gemeinsam mit uns die Technologie von morgen zu entwickeln.
Gitlab-Projekt