Diese Geschichte handelt davon, wie ich eine mobile Roboterplattform gebaut habe und über das Schicksal meines "NanoBot-a" ...
Alles begann im Jahr 2008, als ich jung, naiv und dumm war, beschäftigte ich mich mit Robotik und allgemein mit verschiedenen Mechatronikern. Die Idee, einen großen Wagen zu bauen, hatte sich viel früher in meinem überschwänglichen Kopf niedergelassen, und jetzt, nach einer langen Tragzeit eines Fertigungsplans, begann ich, dieses Wunder der Kindergedanken aufzubauen.
Und ich habe einen solchen Prototyp geboren:

Rahmen aus einem Profilrohr mit quadratischem Querschnitt 25x25mm. Die Gesamtabmessungen betragen 500 x 500 x 300 mm. Nun ja, dann dachte ich im großen Stil ... Zwei Getriebemotoren vom Wischer eines UAZ-Autos, die Räder von einem kleinen Kinderfahrrad antreiben, mussten dieses Ding bewegen, und vorne waren zwei Wetterhähne. Und dieser Riese wurde in der Wohnung gebaut.
Angesichts der Tatsache, dass die Pläne für die Verhaltensalgorithmen „napoleonisch“ waren, musste ein vollwertiger Computer an Bord des Roboters sein, es gab kein Geld für Mini-ITX und ich fand einen normalen PC bei meiner ATX-Mutter. All dies wurde ins Innere gepumpt und auf den Haufen zwei weitere Heliumbatterien, die alles mit einer Drei-Millimeter-Org umhüllten. Glas und im Allgemeinen stellte sich heraus, dass der Apparat teilweise schön, aber sehr groß und schwer war. Es gelang mir nicht, es in Gang zu setzen, da Probleme mit der Elektronik auftraten, und von Zeit zu Zeit gab ich das Projekt manchmal auf und begann wieder zu arbeiten ...

Am Ende wurde mir klar, dass dieses Design sehr umständlich ist, und da die Hauptidee immer noch in meinem Kopf blieb, wurde beschlossen, von vorne zu beginnen ...
Nach fast einem Jahr begann ich zu entwerfen. Dann habe ich mich nur für CAD interessiert und versucht, sie selbst zu studieren. Als Ergebnis habe ich die Zeichnungen zuerst in AutoCAD erstellt und wenig später in 3D übersetzt (als ich anfing, COMPASS 3D zu studieren). Ich werde die Zeichnungen und das Modell für den freien Zugang auslegen, wer weiß, wer nützlich oder interessant sein wird.
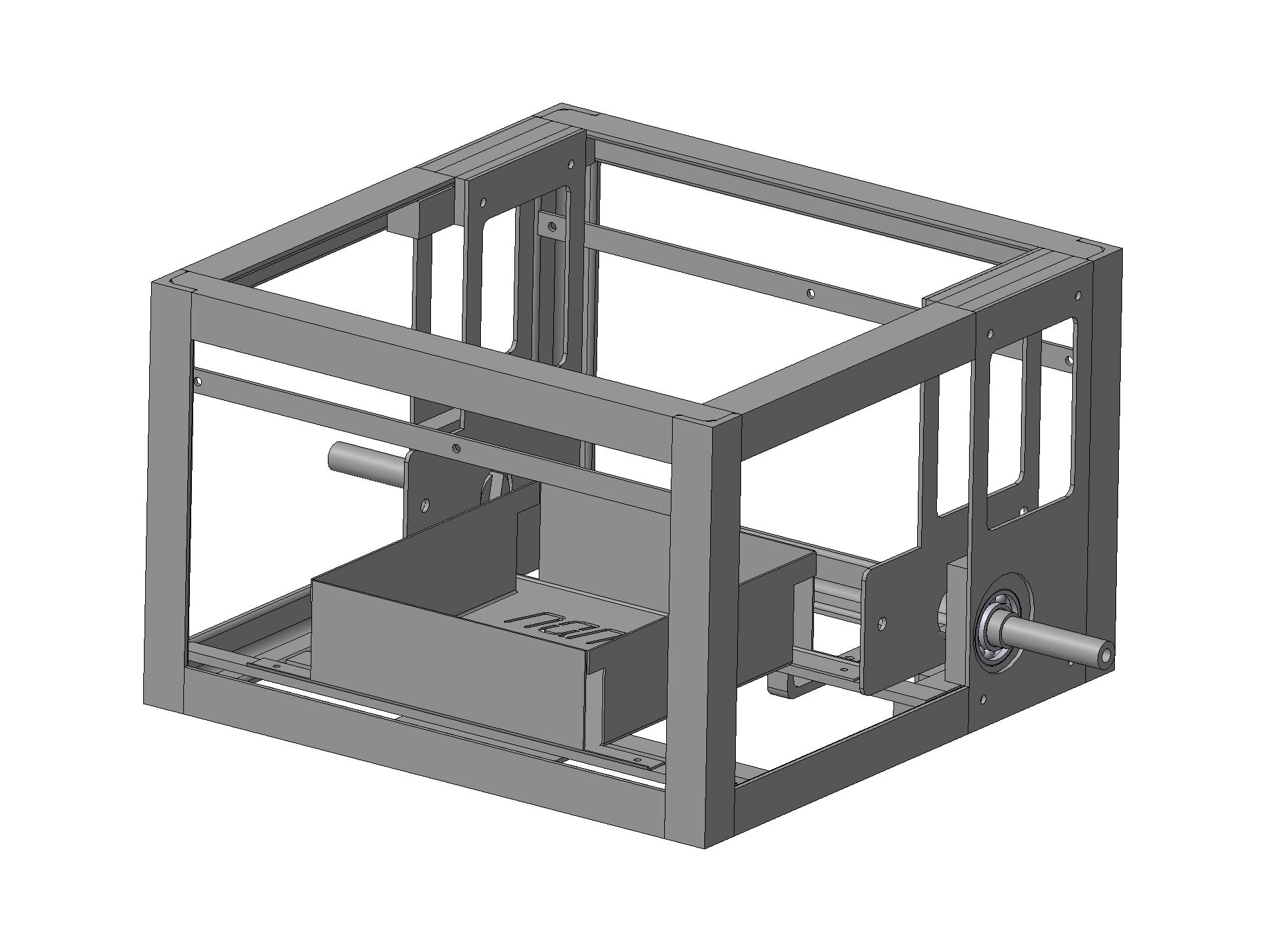
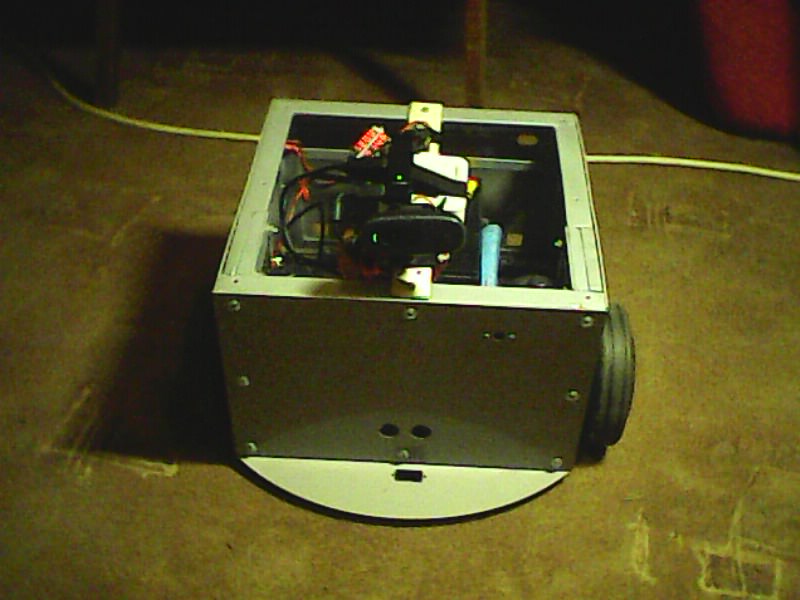
Ich gab die Zeichnungen einer vertrauten Fabrik, in der für mich ein Rahmen für ein paar Flaschen Wodka (Russland - für das es teuer ist) angefertigt wurde. In der Größe war es bereits kleiner als die vorherigen 300x300x200 und wurde aus der zwanzigsten Ecke hergestellt. Zusätzlich wurden Platten zur Motorbefestigung und ein Behälter zum Verlegen von zwei 12-Volt-Batterien mit einem CNC-Laser geschnitten.

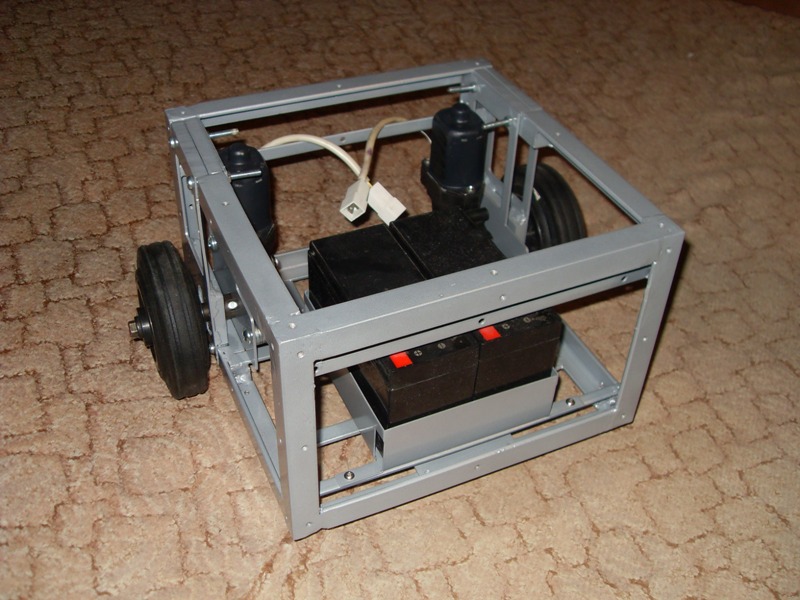
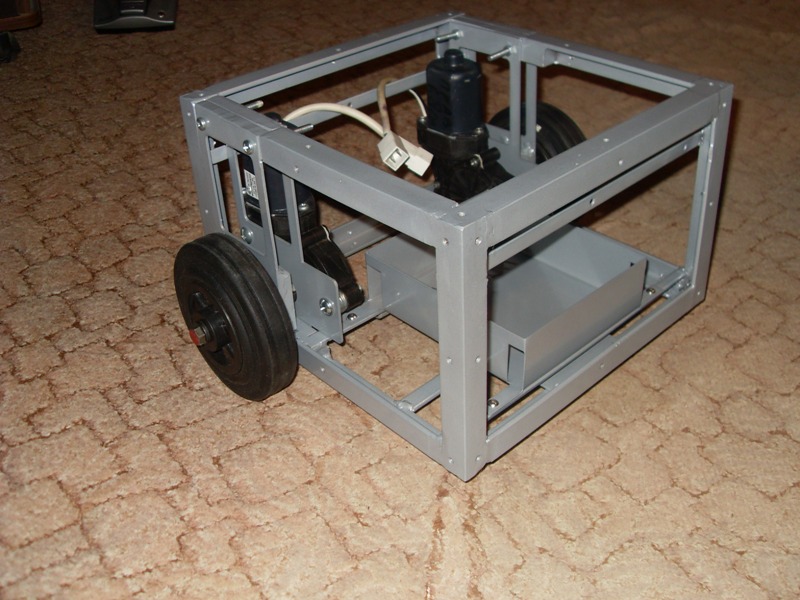
Da dies alles lange Zeit gemacht wurde, gelang es dem Rahmen zu rosten, später gab ich es der Pulverlackierung. Räder mit einem Durchmesser von 125 mm wurden über die in Kugellager eingebauten zusätzlichen Halbachsen direkt an den Motoren befestigt. Vorne ein kleines Flügelrad montiert. Ich beschloss, den Rahmen mit Eisen zu umhüllen, dann schien er technologischer zu sein als aus org geschnitten. Glas, da ich das Büro kannte, in dem Stahl auf der CNC geschnitten wurde, und dann konnte es in jeder Farbe lackiert werden ...


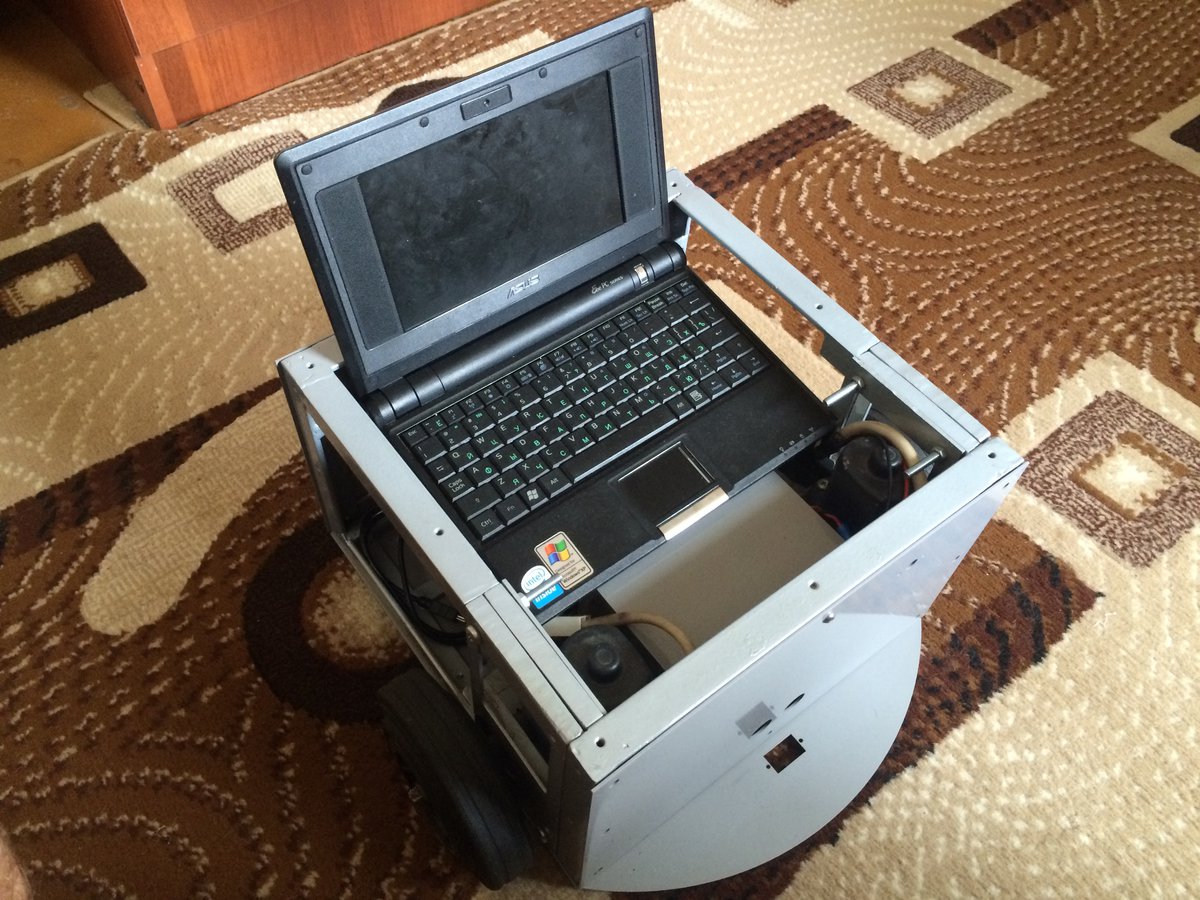
Mit dem Rahmen scheint alles klar zu sein, lassen Sie uns zur Elektronik übergehen. Es war geplant, den Roboter von einem PC aus fernzusteuern, und an Bord des Roboters war auch geplant, etwas von kleinen Computern aus zu installieren. Zu diesem Zeitpunkt hatte ich es bereits geschafft, ein altes ASUS-Netbook von einem Verwandten zu schneiden, dessen Größe perfekt in die Oberseite des Roboters über den Batterien passte. Zur Steuerung des Roboters reicht jedoch ein Netbook nicht aus. Dafür mussten drei weitere Karten von „Open Robotics“ gekauft werden, einer Karte, die auf dem AVR-Mikrocontroller zur Steuerung und Erfassung von Daten basiert. OR-AVR-M128-DS, eine Karte zur Kommunikation mit dem OR-USB-UART-Netbook und Power Board-Treiber OR-MD2-10A-12V-X, jetzt hätte ich sicherlich alles auf Arduino gemacht, aber dann war es nicht so beliebt, und diese Module wurden speziell für Roboterwagen entwickelt. Es war geplant, mehrere Entfernungsmessersensoren und zwei Encoder an die Steuerplatine anzuschließen und mehrere Servos zu steuern, um den Abtastwinkel der Entfernungsmesser zu ändern. Ich wollte einen Entfernungsmesser basierend auf einem Laserpointer und einer Videokamera herstellen. Aber es kam nie dazu, alles beschränkte sich darauf, Elektronik anzuschließen und ein einfaches Programm für das Management zu schreiben. Remoteverwaltung mit dem TeamViewer-Programm. In meinem Programm gab es eine einfache Verbindung zum Port, ein Datenübertragungsempfangsfenster, eine Geschwindigkeitseingangsleitung (PWM in Prozent) und mehrere Richtungstasten.
Aufgrund von Missverständnissen mit der Elektronik wurde das Projekt daher ohne gebührende Aufmerksamkeit belassen, es wurde einmal sehr selten behandelt. Mit der Zeit wurde mir klar, dass es schade war, die Entwicklung wegzuwerfen oder in die Garage zu stellen. Ich beschloss, für einen symbolischen Wert zu verkaufen. Ich dachte, dass es wahrscheinlich Leute gibt, die sich auch dafür interessieren, die bessere Kenntnisse in Elektronik und Programmierung haben, vielleicht arbeitet jemand eine Art Verhaltens- / Bewegungsalgorithmus aus, oder jemand braucht nur eine Werbeplattform in der Ausstellungshalle oder im Laden (natürlich könnte er sich die Beine brechen )
Ich verkaufte es vollständig, zusammen mit Elektronik, einem Akku, einem Netbook, Entfernungsmessern und Servos (rechteckige Ausschnitte mit zwei Löchern in der unteren und oberen runden Abdeckung für MG996r-Servos), einem 16x2-Display und einem Paar LED-Arrays (quadratische Ausschnitte in der vorderen Verkleidungsplatte direkt darunter).

So wie ich es verstehe, hat die Person, die meine Roboterplattform gekauft hat, ihr ein zweites Leben geschenkt. Ich war froh, dass dieses Stück Eisen leben wird. Es war im Jahr 2016 und die Reise begann von der herrlichen Stadt Iwanowo in die Heldenstadt Tula.
Erst kürzlich hat mich der dritte Eigentümer kontaktiert und gesagt, dass er jetzt eine Plattform hat (Region Kaliningrad). Anscheinend ist beim ersten Käufer etwas schiefgegangen ... Die Person, die mich kontaktiert hat, hat mich nicht enttäuscht, aber die Plattform wurde ihm ohne verwandte Komponenten übergeben, aber ansonsten scheint alles intakt zu sein, aber nicht überraschend, da die Roboterhaut aus Metall 1.5 besteht mm Dicke, es ist Zeit für ihn, an Roboterschlachten teilzunehmen ...
Der Roboter hat ein Upgrade erhalten, und der neue Besitzer hat Folgendes darüber geschrieben:
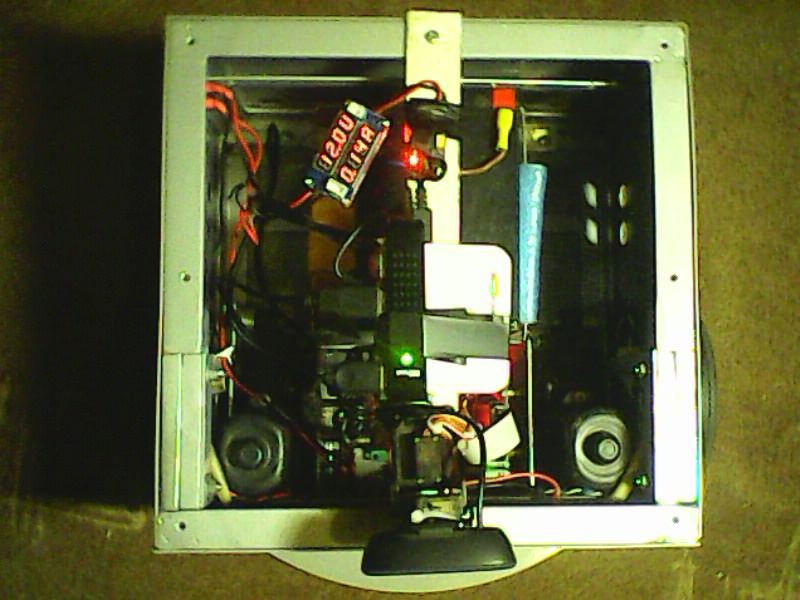
„Die Plattform ist zu mir gekommen. Durch einige Manipulationen wurde eine 10-Ah-12-V-Batterie geliefert, ein TL-MR3020-Router mit benutzerdefinierter OpenRobotisc-Firmware, eine Logitech C270-Webcam auf einer Halterung mit einem Servo, ein Micro-Hub für 4 Ports und ein DC-DC-Wandler zur Stromversorgung des Routers wurden hinzugefügt. Dann wurde alles mit Estrichen, Klebeband und anderen improvisierten Mitteln verschraubt. "Er hat gelebt! (C) Robocip" Ein höllischer 18 kg schwerer Eisen-Narr, der wie verbrüht durch einen kleinen Raum rast und in der Lage ist, Beine niederzuschlagen und Beine zu brechen ... Wir müssen die Räder gegen normale austauschen, das Stützrad wechseln, die Elektronik normal reparieren und kultivieren Drähte. Und nach all den Verbesserungen und Verbesserungen kann diese Wunderkiste auf dem Hof herumfahren und eine Katze und einen Wino-Nachbarn erschrecken. Und wenn Sie einen chinesischen Manipulator auf 6 Server setzen, können Sie Objekte aus der Ferne pfoten. “
Und das ist aus den neuesten Nachrichten:
Hier ist eine solche Geschichte über mein Baby. Ich hoffe, dass der neue Besitzer den Roboter nicht verlässt und lange lebt (sowohl der Besitzer als auch der Roboter). Andernfalls soll das Schicksal der Plattform unter einem Apfelbaum begraben werden, um den Boden mit Eisen zu sättigen. Dies ist natürlich ein klarer Vorteil für den Apfelbaum, aber nicht der direkte Zweck des erstellten Roboters.
Was den Namen "NanoBot" betrifft, so ist alles ganz einfach. Wahrscheinlich erinnern sich viele Menschen an die riesige Menge an Werbung (auf der Zombie-Box), in der es ein so beliebtes Präfix "nano" gab, dass ich mich entschied, dieses Präfix dem Namen meines Roboters hinzuzufügen, zumal es seine physikalischen Parameter vollständig beschrieb.