An der ITMO-Universität wurde auf der Grundlage der Abteilung für Steuerungssysteme und Informatik (SUII) ein Robotiklabor eröffnet. Wir werden über die Projekte berichten, an denen innerhalb der Wände gearbeitet wird, und die Werkzeuge zeigen: Industrieroboter-Manipulatoren, Roboter-Greifvorrichtungen sowie eine Installation zum Testen dynamischer Positionierungssysteme unter Verwendung eines Robotermodells eines Oberflächengefäßes.

Spezialisierung
Das Robotiklabor gehört zur ältesten Abteilung der ITMO-Universität, die als "Steuerungssysteme und Informatik" bezeichnet wird. Sie erschien 1945. Das Labor selbst wurde 1955 eröffnet - dann befasste es sich mit Fragen der Automatisierung von Messungen und der Berechnung von Parametern von Oberflächenschiffen. Später wurde das Richtungsspektrum erweitert: Kybernetik, CAD sowie Robotik.
Heute verbessern Labors Industrieroboter. Mitarbeiter lösen Probleme im Zusammenhang mit Mensch-Maschine-Interaktionen - sie entwickeln sichere Steuerungsalgorithmen mit Kontrolle über die Stärke des Roboters und arbeiten auch an kollaborativen Robotern, die Aufgaben neben Menschen ausführen können.
Das Labor entwickelt auch alternative Methoden zur Fernsteuerung von Robotergruppen und erstellt Softwarealgorithmen, die neu konfiguriert werden können, um neue Aufgaben online auszuführen.
Projekte
Eine Reihe von Laborrobotersystemen wurde von großen Unternehmen erworben und ist für Forschungs- oder Industriezwecke bestimmt. Ein Teil der Ausrüstung wurde von Mitarbeitern im Rahmen von Forschung und Entwicklung hergestellt.
Von letzterem kann
die Stuart-Roboterplattform mit zwei Freiheitsgraden unterschieden werden. Die akademische Installation dient zum Testen von Steuerungsalgorithmen, um den Ball in der Mitte des Standorts zu halten (Sie können das System in
diesem Video in Aktion sehen).
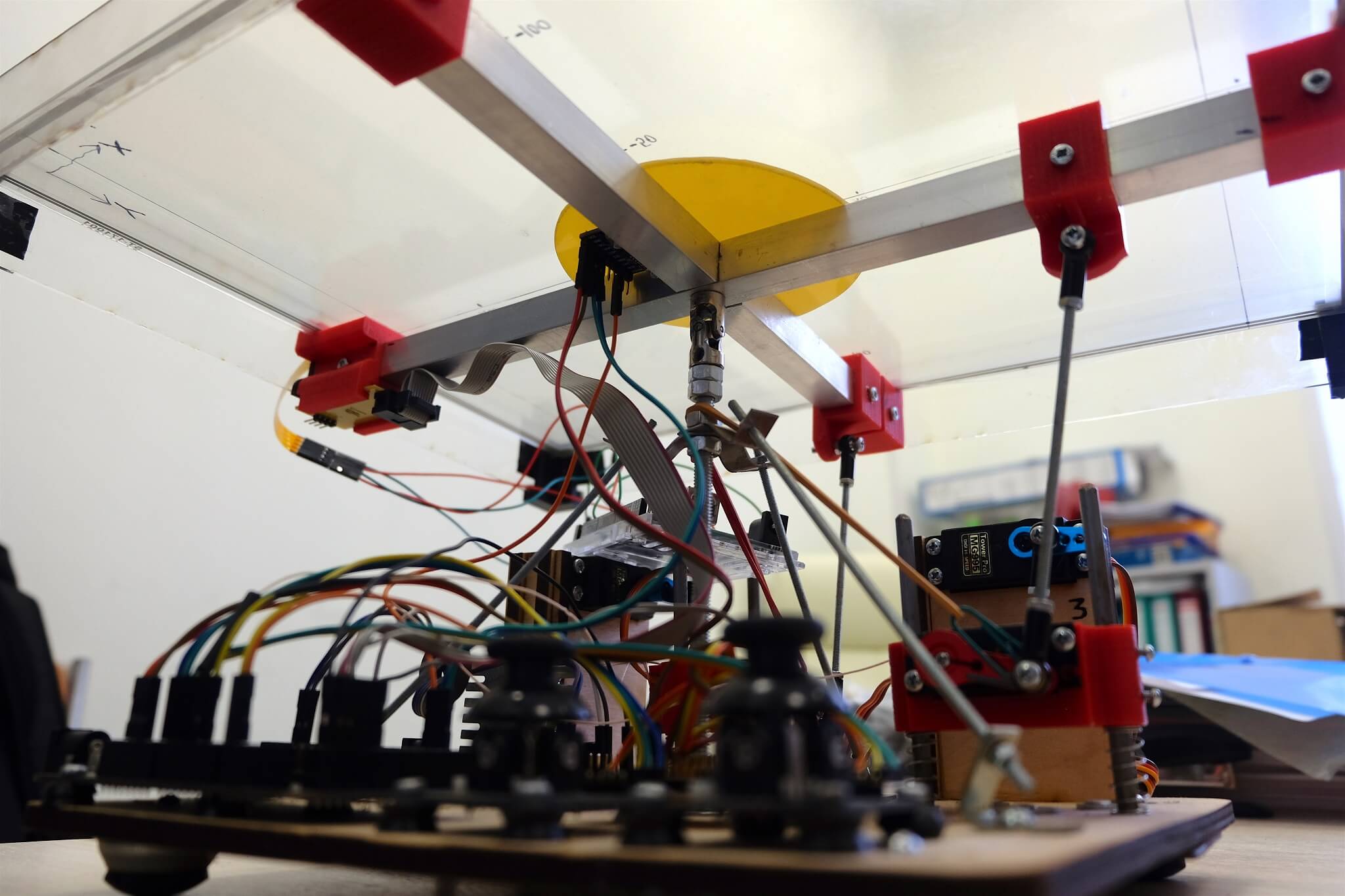
Der Roboterkomplex besteht aus einer rechteckigen Plattform mit einem resistiven Sensorsubstrat, das die Koordinaten der Kugel bestimmt. Die Antriebswellen sind mit einem Drehgelenk daran befestigt. Diese Laufwerke ändern den Winkel der Plattform entsprechend den vom Computer über USB empfangenen Steuersignalen und lassen den Ball nicht wegrollen.
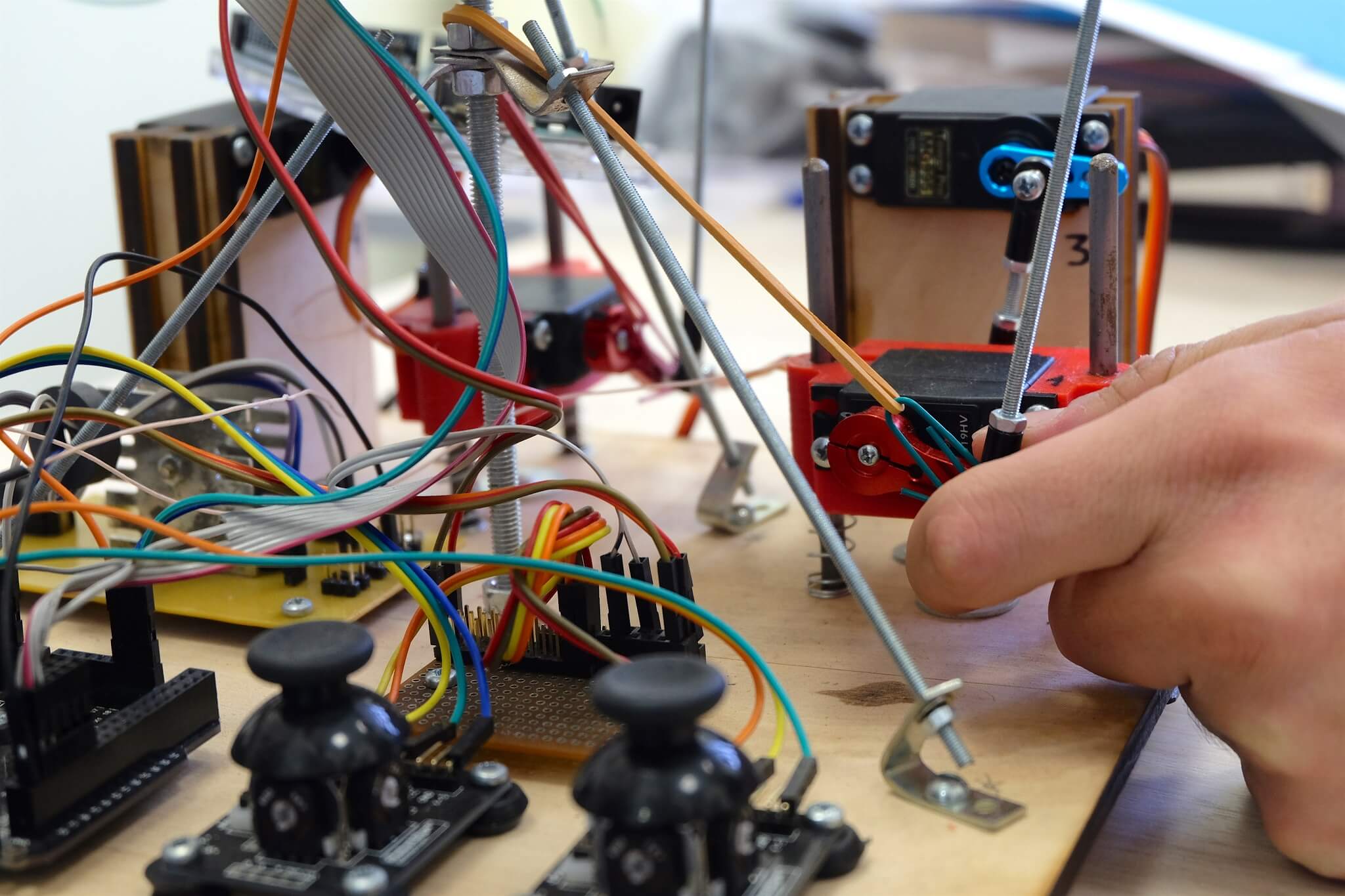
Der Komplex verfügt über zusätzliche Servos, die für den Ausgleich von Störungen verantwortlich sind. Für den Betrieb dieser Antriebe entwickelten die Labormitarbeiter spezielle Algorithmen, die verschiedene Arten von Störungen wie Vibrationen oder Wind „ausgleichen“.
Darüber hinaus gibt es im
Roboterpark des Labors eine
KUKA youBot- Forschungseinrichtung, bei der es sich um einen
Fünflenker -Roboterarm handelt, der auf einer mobilen Plattform mit omnidirektionalen Rädern montiert ist.

KUKA youBot testete
adaptive Steuerungsalgorithmen zur Verfolgung eines sich bewegenden Ziels . Sie verwenden ein Bildverarbeitungssystem, das auf einer Digitalkamera und Videoverarbeitungsverfahren basiert. Grundlage dieses Projekts ist die Forschung auf dem Gebiet der adaptiven Steuerung nichtlinearer Systeme, die von Laborpersonal durchgeführt wird.
Steueralgorithmen werden verwendet, um externe Einflüsse auf die Verbindungen des Roboters zu kompensieren. Infolgedessen kann die Maschine das Arbeitswerkzeug an einem festen Punkt im Raum halten und es stabil entlang einer bestimmten Flugbahn bewegen.
Ein Beispiel für ein Projekt, das auf Basis des KUKA youBot-Roboters durchgeführt wurde, ist eine
sensorlose Kraftmomentempfindung . Gemeinsam mit der britischen Firma TRA Robotics haben wir einen Algorithmus entwickelt, mit dem wir die Wechselwirkungskraft zwischen Arbeitswerkzeug und Umgebung ohne teure Drehmomentsensoren bewerten können. Dies ermöglichte es dem Roboter, komplexere Operationen durchzuführen, ohne auf externe Systeme zurückgreifen zu müssen.

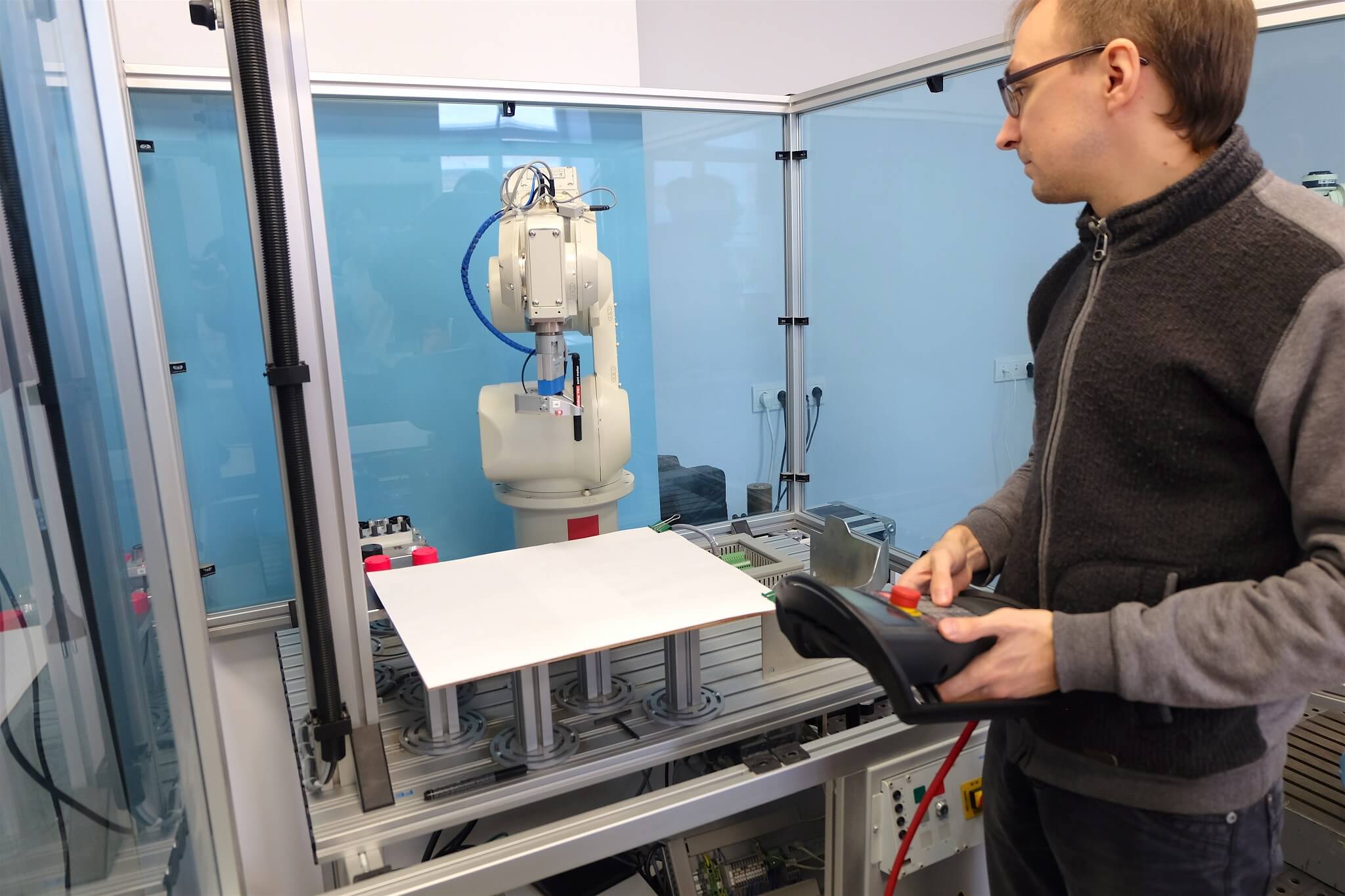
Ein weiteres Beispiel für eine Roboterinstallation in einem Labor ist die
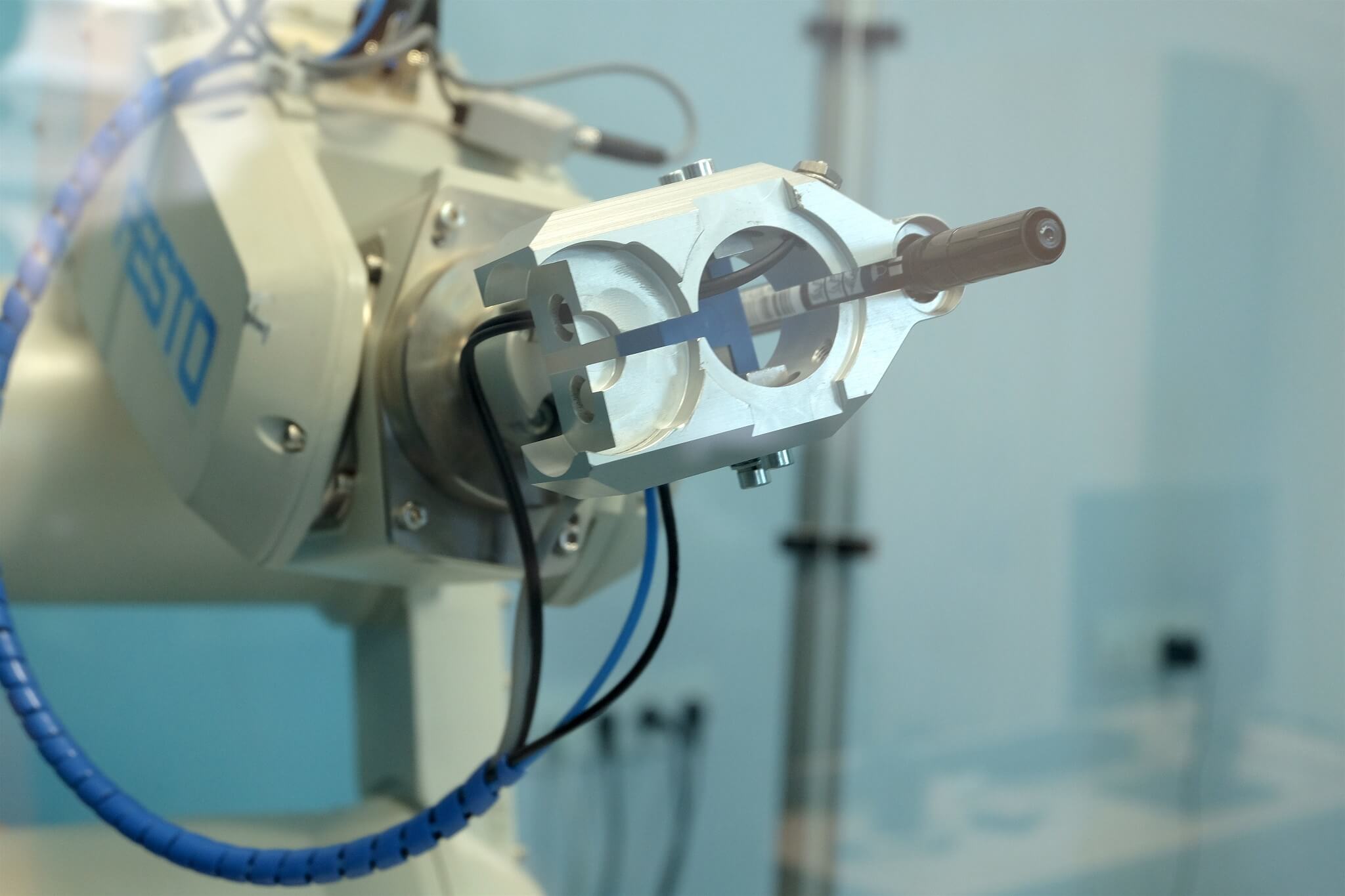
FESTO Robot Vision Cell . Dieser Komplex wird verwendet,
um technologische Vorgänge in der Produktion wie das Schweißen zu
simulieren . Um dieses Szenario zu implementieren, wird die Aufgabe der Bewegungsplanung gestellt: Ein Simulationsschweißwerkzeug umgeht die Kontur eines Metallteils.
Darüber hinaus ist die Zelle mit einem Bildverarbeitungssystem ausgestattet und kann die Aufgaben des Sortierens von Teilen nach Farbe oder Form lösen.
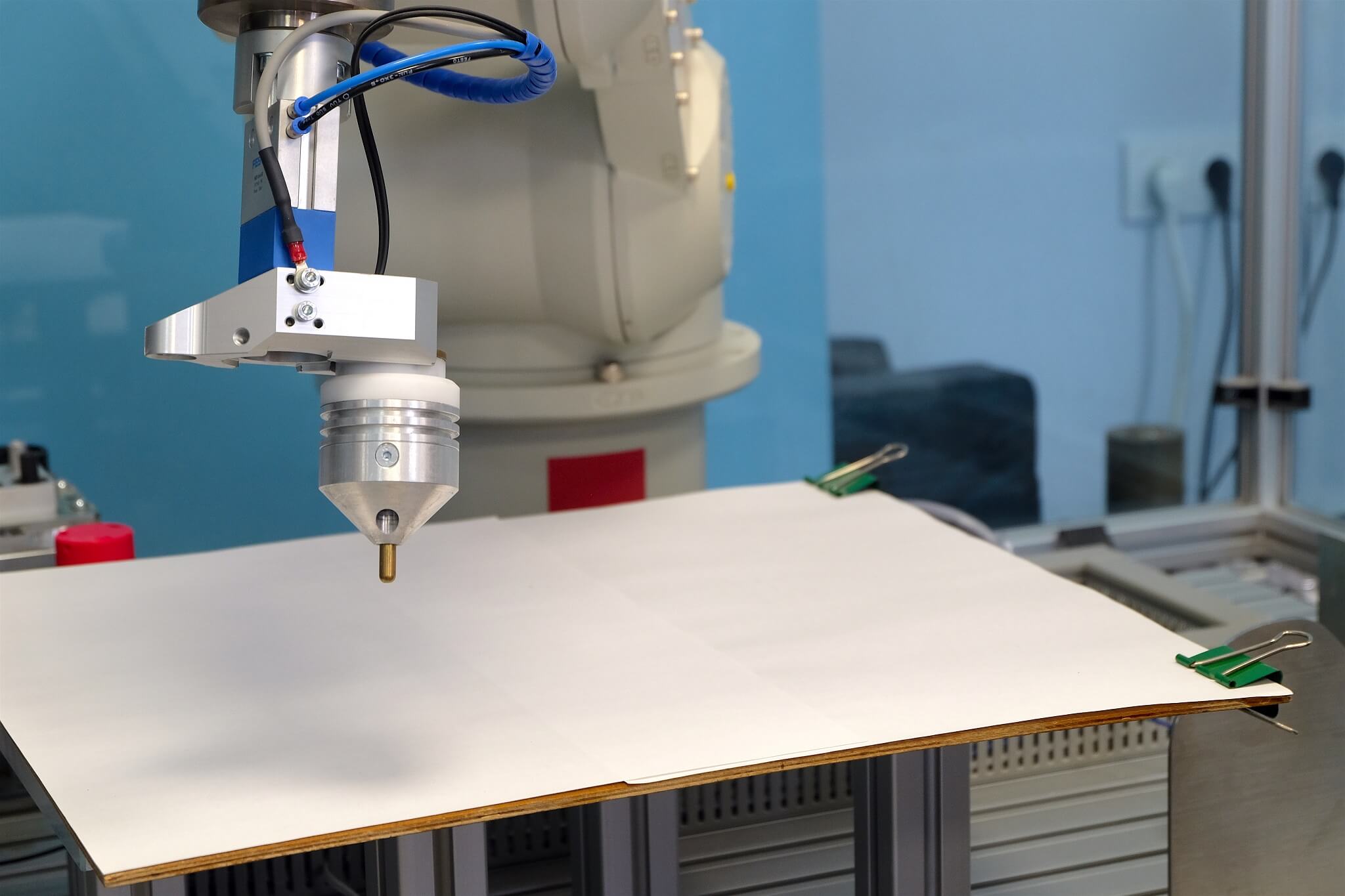
Das Projekt, das auf der Roboterzelle FESTO Robot Vision Cell mit dem Industrieroboter Mitsubishi RV-3SDB basiert, löst die Aufgaben der Bewegungsplanung.
Dies vereinfacht den Prozess der Bedienerinteraktion mit der Robotersteuerung beim Programmieren komplexer Pfade. Die Idee ist, die Bewegungen des Roboterwerkzeugs automatisch anhand der in der Bitmap gezeigten Konturen zu programmieren. Es reicht aus, eine Datei in das System hochzuladen, und der Algorithmus ordnet die erforderlichen Referenzpunkte unabhängig voneinander an und kompiliert den Programmcode.
In der Praxis kann die resultierende Lösung zum Gravieren oder Zeichnen verwendet werden.
Wir haben ein
Video auf dem Kanal, in dem unser "Roboterkünstler" ein Porträt von A. S. Puschkin zeigt. Die Technologie kann auch zum Schweißen von Teilen komplexer Form verwendet werden. Tatsächlich ist es ein Roboterkomplex, der industrielle Probleme unter Laborbedingungen löst.
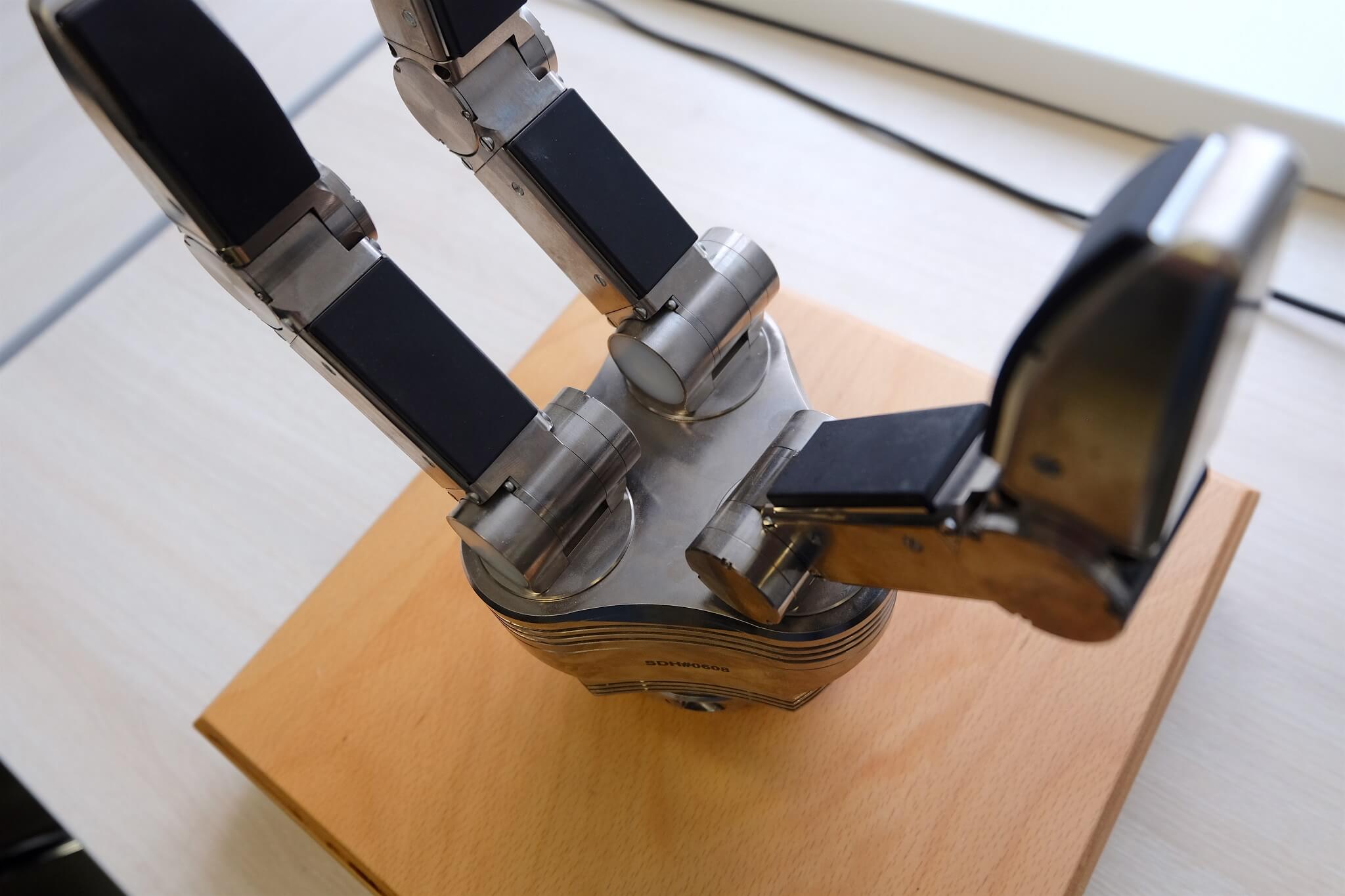
Das Labor verfügt außerdem über einen Dreifinger-Greifer mit Drucksensoren an der Innenfläche der Finger.
Eine solche Vorrichtung ermöglicht den Umgang mit zerbrechlichen Gegenständen, wenn es wichtig ist, die Griffkraft genau zu steuern, um Schäden zu vermeiden.
Das Labor verfügt über ein
Robotermodell eines Oberflächengefäßes , mit dem dynamische Positionierungssysteme getestet werden können.
Das Modell ist mit mehreren Executive-Laufwerken sowie Funkkommunikationshardware zur Übertragung von Steuersignalen ausgestattet.

Im Laborraum befindet sich ein Schwimmbad, in dem die Funktionsweise von Steuerungsalgorithmen
zum Halten der Position eines kleinen Modells eines Oberflächenschiffs mit Kompensation von Längs- und Querverschiebungen überprüft wird.
Derzeit ist geplant, einen großen Pool für umfangreiche Tests mit komplizierten Szenarien zu organisieren.

Arbeiten Sie mit Partnern und Plänen
Einer unserer Partner ist das britische Unternehmen TRA Robotics. Gemeinsam arbeiten wir an der Verbesserung der Steuerungsalgorithmen für Industrieroboter für ein digitales Fertigungsunternehmen. In einem solchen Unternehmen wird der gesamte Produktionszyklus: von der Entwicklung bis zur Herstellung von Industrieprodukten von Robotern und KI-Systemen ausgeführt.
Weitere Partner sind der Elektropribor-Konzern, mit dem wir mechatronische und Robotersysteme entwickeln. Unsere Studenten helfen den Anliegen in den Bereichen Instrumentierung, Softwareentwicklung und Produktionsaufgaben.
Wir arbeiten auch mit General Motors zusammen und
entwickeln mit InfoWatch Robotik. Außerdem arbeiten die Labormitarbeiter eng mit der Firma
Navis JSC zusammen , die Projekte zur Entwicklung dynamischer Positionierungssysteme für Überwasserschiffe durchführt.
Das
Labor für Jugendrobotik arbeitet auf der Grundlage der ITMO-Universität, an der sich Schulkinder auf Weltklasse-Wettbewerbe vorbereiten. Zum Beispiel gewann unser Team 2017
die World Robot Olympiad in Costa Rica, und im Sommer 2018 nahmen unsere Schüler zwei Preise bei der Allrussischen Olympiade für Schulkinder entgegen.
Wir
planen, mehr Industriepartner
zu gewinnen und die jüngere Generation russischer Wissenschaftler auszubilden. Vielleicht werden sie solche Roboter entwickeln, die die Welt der Menschen organisch ergänzen und routinemäßigere und gefährlichere Aufgaben in Unternehmen ausführen.
Fototouren durch andere Labors der ITMO University: