Hallo, liebe Teilnehmer und Gäste der Seite. Ich werde versuchen, mich in diesem Thema so kurz wie möglich zu fassen. Der Boom der Robotik in den letzten Jahren, viel Aufmerksamkeit für dieses Thema konnte mich nicht gleichgültig lassen.
Ich verfolgte den Kindheitstraum, einen Roboter zu bauen, und ging vor etwa einem Jahr zum Forum
cyber-place.ru , um Informationen zu suchen (nicht für Werbung in Betracht ziehen). In meinen wildesten Fantasien hatte ich den Gedanken, einen eigenen Telepräsenzroboter zu entwickeln, der sich in der Raum-, Video- und bidirektionalen Audiokommunikation mit Fernbedienung per Telefon oder Computer bewegen kann. Ich wurde von dem Modell inspiriert, das auf dem tplink 3020-Router mit Cyberwrt-Firmware basiert. Mangelndes Wissen über das Thema und große Lücken in der Ausbildung haben meinen manischen Wunsch, ein Ergebnis zu erzielen, aufgrund von Versuch und Irrtum und verbrannter Elektronik nicht beeinträchtigt.
Nach fast einem Jahr „aus meinen Fehlern lernen“ erschienen die ersten Ergebnisse, eine Maschine mit der Fähigkeit, über das Internet basierend auf Cyberbot -3 zu steuern, wofür die Jungs dank ihrer Entwickler wirklich großartige Arbeit geleistet haben! (Für mich ist das Programmieren und Erstellen von Software nur Platz!) Viele Leute haben die Schreibmaschine gemacht, die Ausrüstung und die detaillierten Anweisungen befinden sich in den Weiten des Internets. Daher sehe ich keinen Grund, darauf einzugehen.

Ferner bestand die Notwendigkeit für die Autonomie des Geräts, die (aus improvisierten Mitteln) eine „Ladestation“ baute und federbelastete Kontakte vor dem Roboter sicherte. Die Hauptleistung des Roboters wird mit 4,2 V für die Möglichkeit des Ladens über eine 5-V-Stromversorgung gewählt. Um den Ladestrom zu erhöhen, wurden zwei TP4056-Module parallel verlötet. Verwaltete all diese Wirtschaft über das Internet per Telefon, über einen Browser.


Nachdem ich genug mit dem Modell gespielt habe, für das ich mich entschieden habe, muss ich weitermachen. Leider habe ich keinen Weg gefunden (ich denke, dass noch alles vor mir liegt), um das Gerät basierend auf einem, dem Hauptcontroller, zu verwalten.
Da dieses Gerät keine bidirektionale Audiokommunikation ermöglicht, konnte ich keinen besseren Weg finden, um die CCTV-Kamera DS-2CD2432F-IW zu verwenden. Diese Kamera mit Unterstützung von Software von Drittanbietern auf Android (tinyCam PRO) ermöglicht Videoüberwachung und bidirektionales Audio. Ursprünglich gab es eine (verrückte) Idee, eine Verbindung zum technischen Anschluss der Kamera herzustellen, um uart zu lesen und die Bewegung des Roboterwagens mit der Standardkamerasoftware zu steuern. Verwenden Sie PTZ-Kameras, um sich zu bewegen. Ich wollte überlegen, welche Teams auf uart liegen, wenn ich mit einer nicht drehbaren Kamera nach links, rechts, unten und oben drücke und diese Befehle dann auf uart arduino nano treibe, das die Motoren steuern sollte. Deshalb wollte ich das Hauptproblem für mich selbst lösen und nicht schreiben Software. Die Idee war nicht erfolgreich, der Hersteller blockierte diese Befehle, bis auf die Meldung "ptz nicht unterstützt", wenn Sie auf die PTZ-Schaltflächen in uart klicken, kam nichts.
Daher war die „Kamera auf Rädern“ und nicht der Telepräsenzroboter das Ergebnis meiner Bemühungen.
Um das Gerät vom Telefon aus zu steuern, nutze ich die Möglichkeit, mehrere Anwendungen auf Android zu öffnen, die sogenannten "schwebenden Fenster" (in späteren Versionen funktioniert es ohne Anwendungen von Drittanbietern wie schwebende Apps). Sie müssen zwei Anwendungen öffnen, tinyCam PRO für den Zugriff auf die Kameraoberfläche und einen Browser für den Zugriff auf die Wagensteuerung.
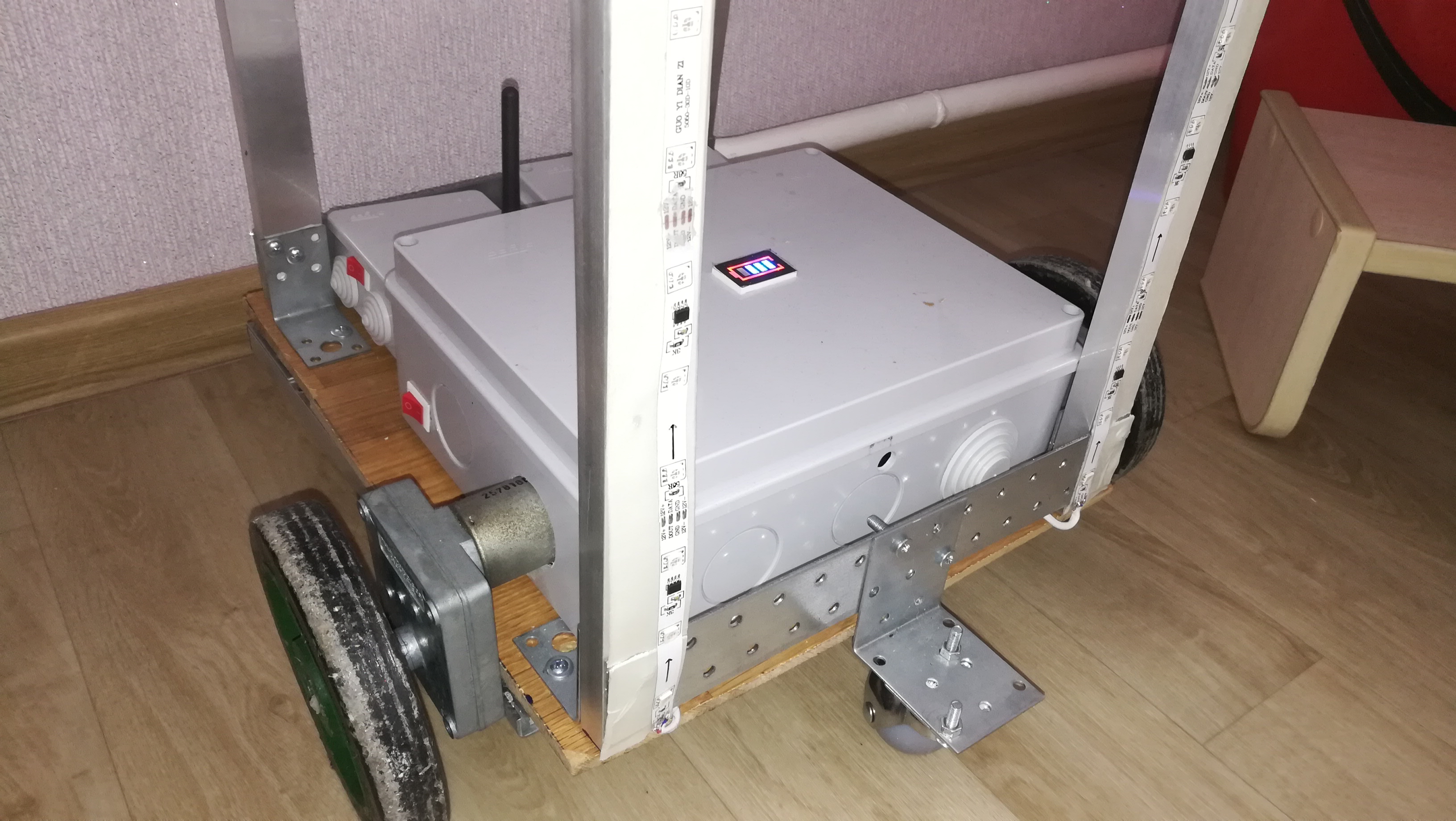
Das Ergebnis ist also eine elektrische Anschlussdose als Box für das Hosting von TP Link 3020-Geräten mit CyberWRT-Firmware, eine gelötete Antenne, in meinem Fall + 10 dB, ein Arduino Nano, der Uart-Befehle von der Weboberfläche des Routers empfängt, ein Monster-Motorschild zur Steuerung leistungsstarker Motorgetriebe, die entfernt wurden alte Spielautomaten.

Die Höhe des Roboters beträgt 165 cm, das Gewicht ca. 10 kg, die Leistung 12,6 V (Lithium-Baugruppe 18650 + Laderegler mit Balancer), eine Dose Mayonnaise anstelle des Kopfes, in dem die Kamera versteckt ist, der Vollzeitlautsprecher der Kamera wird durch einen 5-Watt-Lautsprecher ersetzt, damit ich besser hören kann . Augen - zwei LEDs, die unter dem Licht in die Reflektoren eingesetzt werden, die Augen werden über die Cyberbot-Schnittstelle gesteuert, zwei Adress-LED-Streifen und ein zusätzlicher Arduino Pro Mini-Controller, um sie zu steuern (dank Alex Guyver wurde sein Projekt „Feuerlampe“ zerrissen).
Das Band wird auf Befehl über das Relaismodul gesteuert, auch über die Cyberbot-Schnittstelle.
Das unangenehme Aussehen ist darauf zurückzuführen, dass sich der Roboter am 8. März verkleidet und seinen Kollegen gratuliert hat. (Der Roboter ritt zur Musik vom Terminator, der von mir von einem abgelegenen Ort aus gesteuert wurde, war verwirrt von der leichten Musik und der reibungslosen Einbeziehung von LEDs, das Publikum war begeistert).


In Zukunft plane ich, die Arbeit mit dem Manipulator zu meistern, alle "unnötigen" zu entfernen, die erforderliche Ausrüstung (den Router und das Arduino durch ESP32 zu ersetzen) und die Software auszuwählen, damit auch meine Großmutter das "Design" verwalten kann :)) Das Thema wurde nicht vollständig offengelegt, ich habe nicht viele Punkte behandelt Um den langen Beitrag nicht zu verzögern, freue ich mich auf Ihre Kritik und Ihren Rat, wenn Ihnen das Thema gefallen hat.