Diese Lösung enthält keine Skelettstruktur, die Hand besteht aus weichen und flexiblen Materialien, die Phalangen der Finger bestehen aus dreidimensionalem Textilgewebe mit taktilen Sensoren und flexiblen Leitern, die mit pneumatischen Modulen gebogen werden können. Im Handgelenk ist ein Knoten mit Ventilen installiert, der bei Bedarf die Elemente der Hand mit feinmotorischen Bewegungen betätigt.
Die Bewegungen von BionicSoftHand werden durch künstliche Intelligenz gesteuert, die durch Versuch und Irrtum lernen kann, und führen nach Anpassung an die Aufgabe schnell und autonom die erforderlichen Aktionen mit Objekten aus, ähnlich wie es eine Person tut

Link zur Beschreibung des Herstellers der
BionicSoftHand- Lösung
hier .
 Der BionicSoftHand-Roboterarm ist ausgestattet mit:
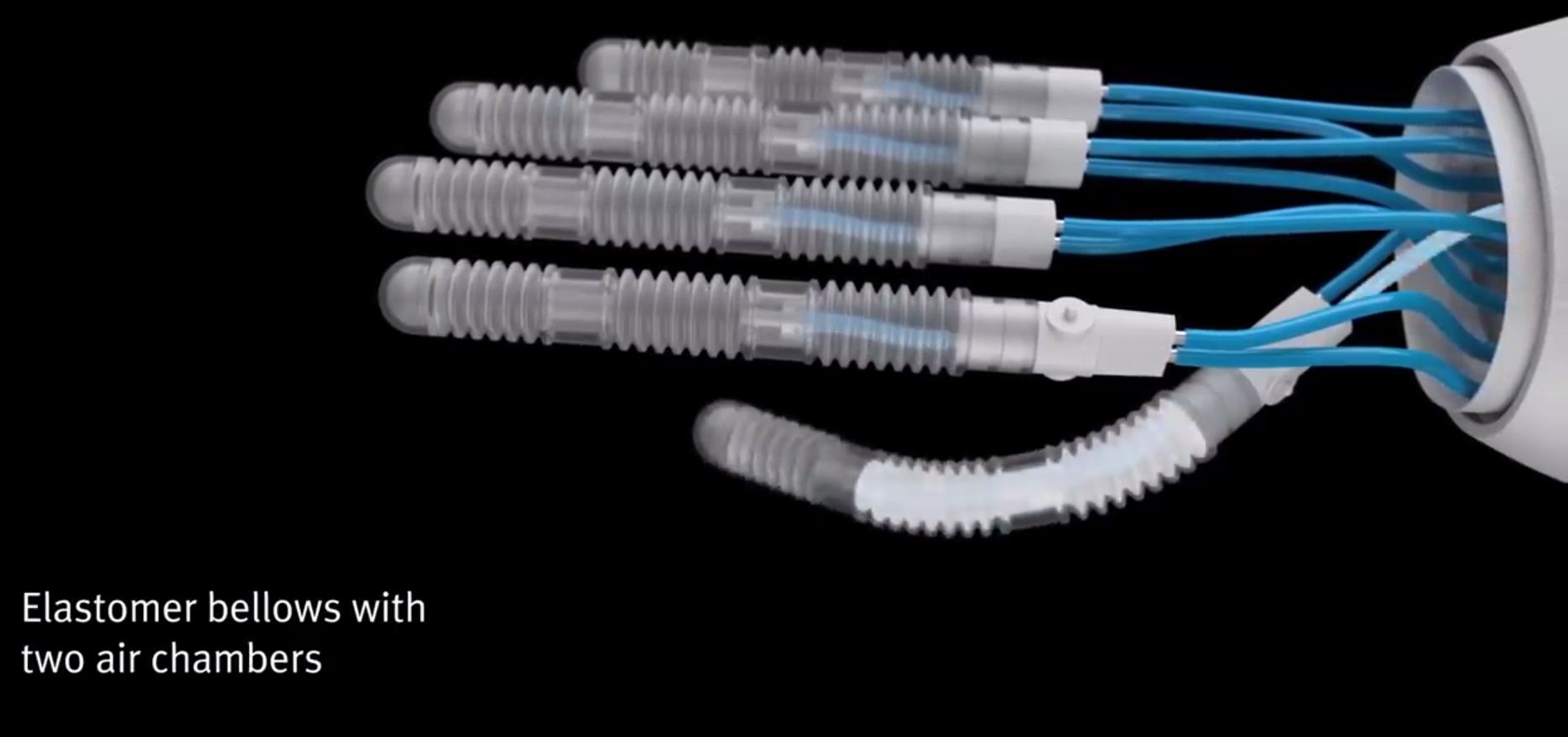
Der BionicSoftHand-Roboterarm ist ausgestattet mit:- aufblasbarer Balg, um den sich ein dreidimensionales Gewebe aus 3D-Druck aus elastischen Fasern befindet, das sich zusammen mit den Handbewegungen biegt, wenn Luft in den Balg eingespeist wird, ähnlich wie bei Muskeln und Sehnen;
- pneumatische Rotationsmodule;
- Ventilklemme für 24 Piezoventile;
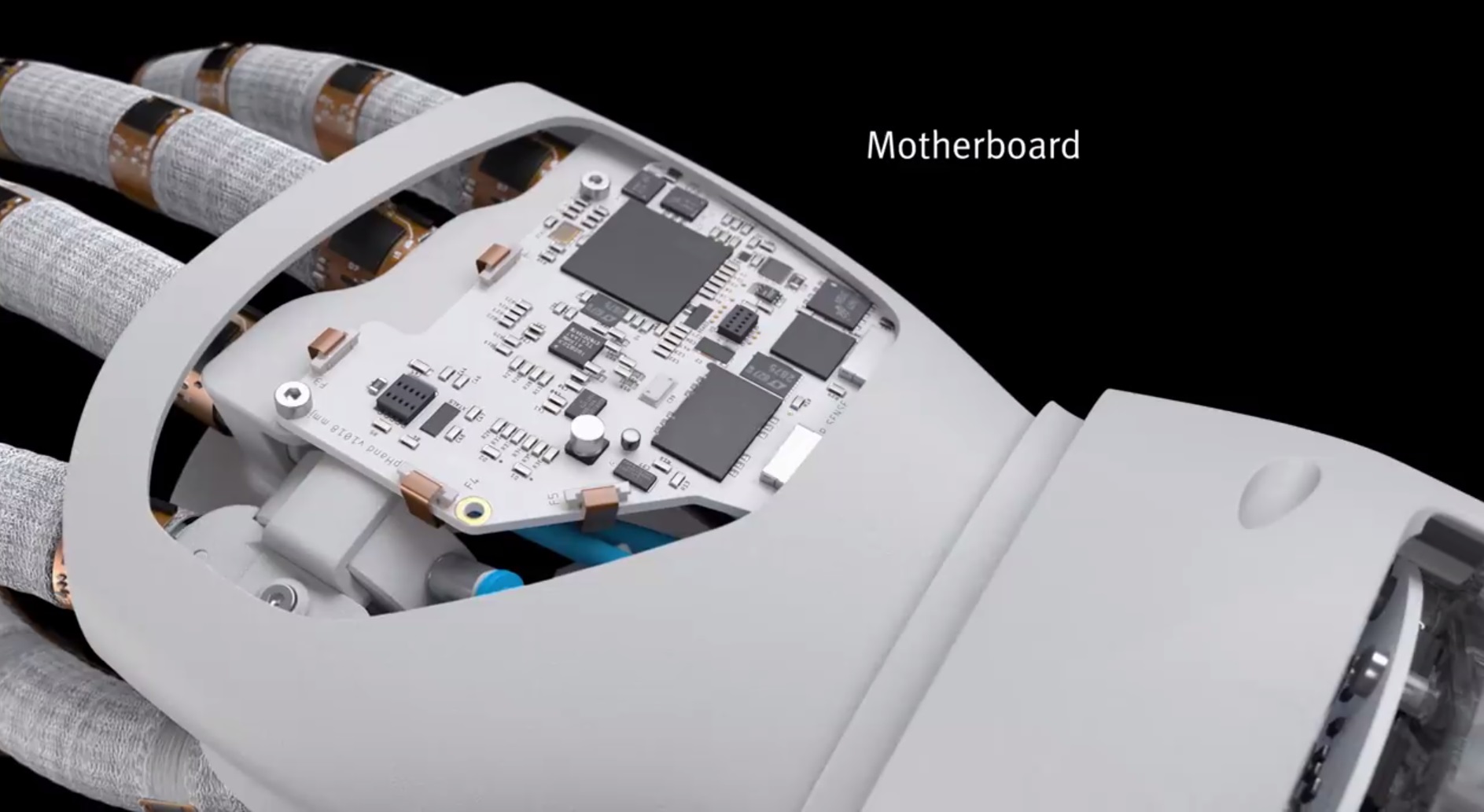
- ein integriertes Motherboard, auch zur autonomen Bewegungssteuerung;
- Trägheits- (Bewegungs-) und Kraftsensoren (in weichen Fingern installiert), die ebenfalls auf der Basis flexibler Materialien hergestellt werden und sich im Moment der Bewegung biegen können;
- ein selbstlernendes KI-Modul, das in der Lage ist, unabhängig zu berechnen, wie mit verschiedenen Objekten am besten interagiert und verschiedene Aktionen ausgeführt werden können, und in kürzester Zeit Daten von 3D-Kameras mit Tiefenwahrnehmung zur Analyse von Objekten und Bewegungen zu empfangen.
Technische Eigenschaften der Gerätekomponenten:
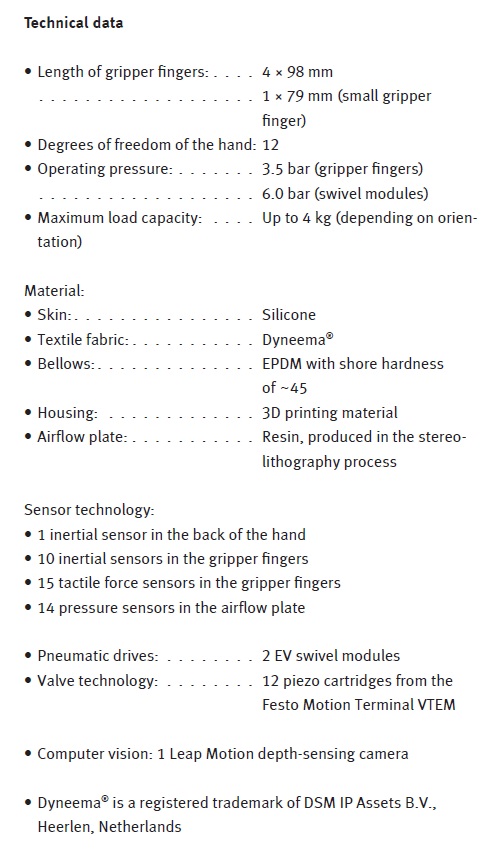


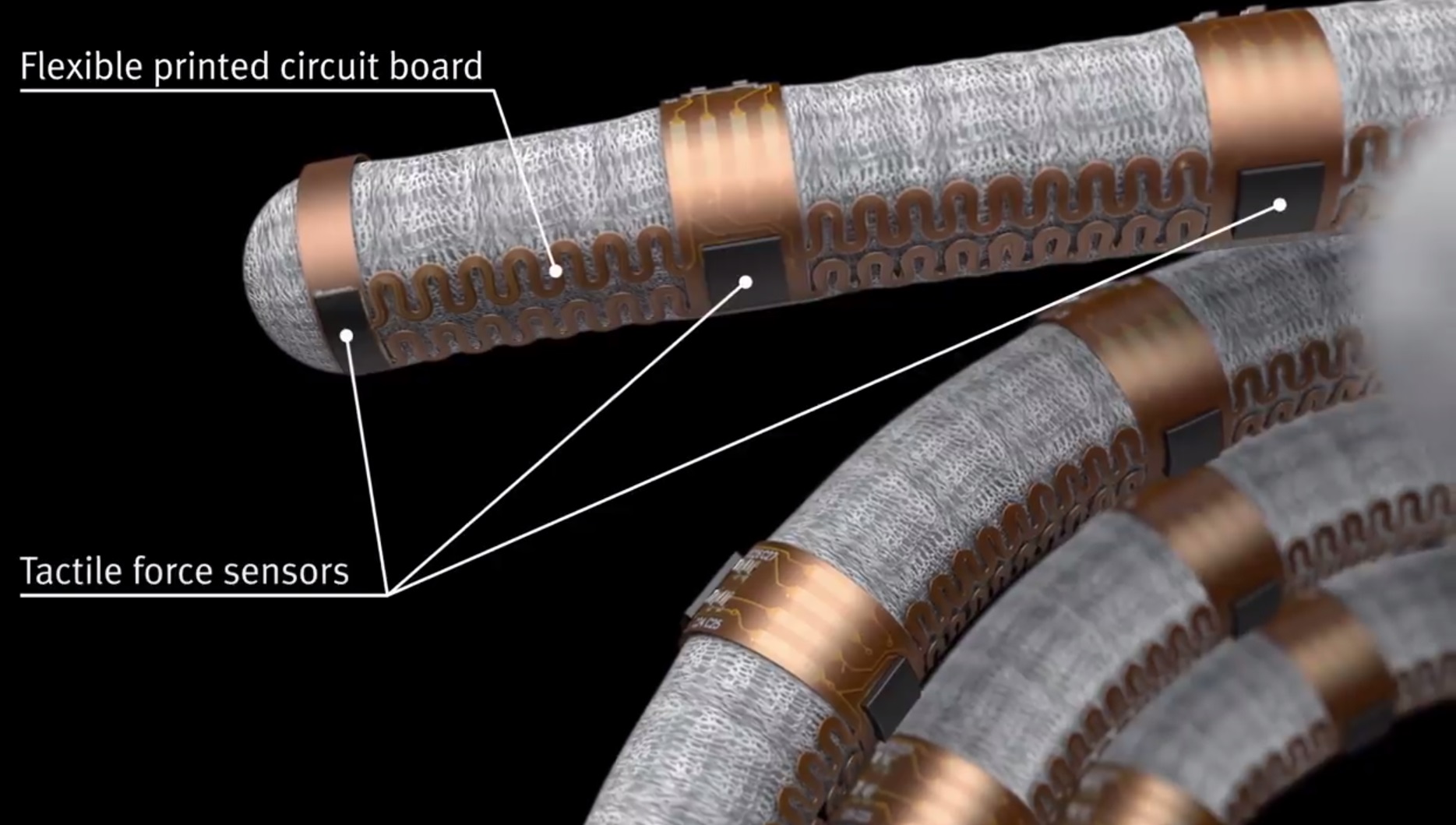





Eine Reihe von Berührungssensoren an den Fingern der Hand gibt Rückmeldung an die Steuerungssysteme der Hand (mit den Komponenten der KI) und berichtet über die Bewegungen der Hand und der Finger sowie über die Methoden und Bewegungen bei Kontakt mit verschiedenen Objekten. Dieselbe KI analysiert die Informationen darüber, ob sie korrekt sind Ein Objekt befindet sich zur Manipulation in der Hand, wobei eine Matrix der Kontaktwahrnehmung verwendet wird, die den Tastsinn einer Person imitiert. Ferner berechnet die KI, welche Anstrengungen unternommen werden müssen, um das Subjekt zu halten, welche Art von Motorsequenz für die Positionen und Bewegungen der Finger ausgeführt werden sollte, wie breit es ist, die Handfläche zu öffnen und so weiter.

Ursprünglich war die BionicSoftHand-Hand nicht für bestimmte Bewegungen programmiert, und die an ihre Steuerplatine angeschlossene KI ist in der Durchführung von Testaufgaben mithilfe paralleler Lerntechnologien geschult, die in einer virtuellen Umgebung erstellt werden, sodass der Roboterarm im Laufe der Zeit nur noch „intelligenter“ wird Lösungen für neue Probleme, um Kombinationen von Bewegungen zu verwenden, die bereits untersucht und mit realen Aktionen verifiziert wurden, die dann für neue Aufgaben optimiert werden.

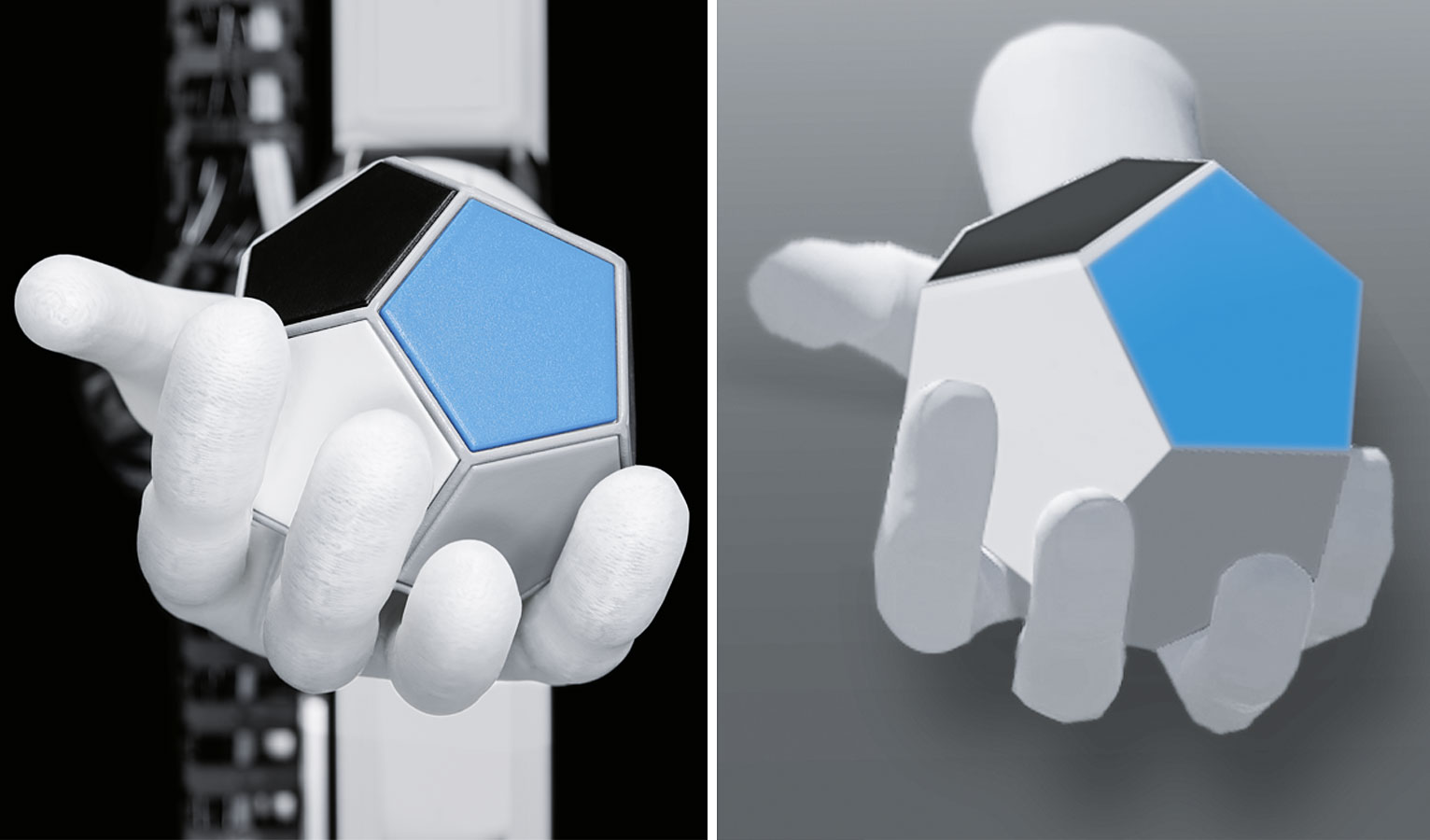
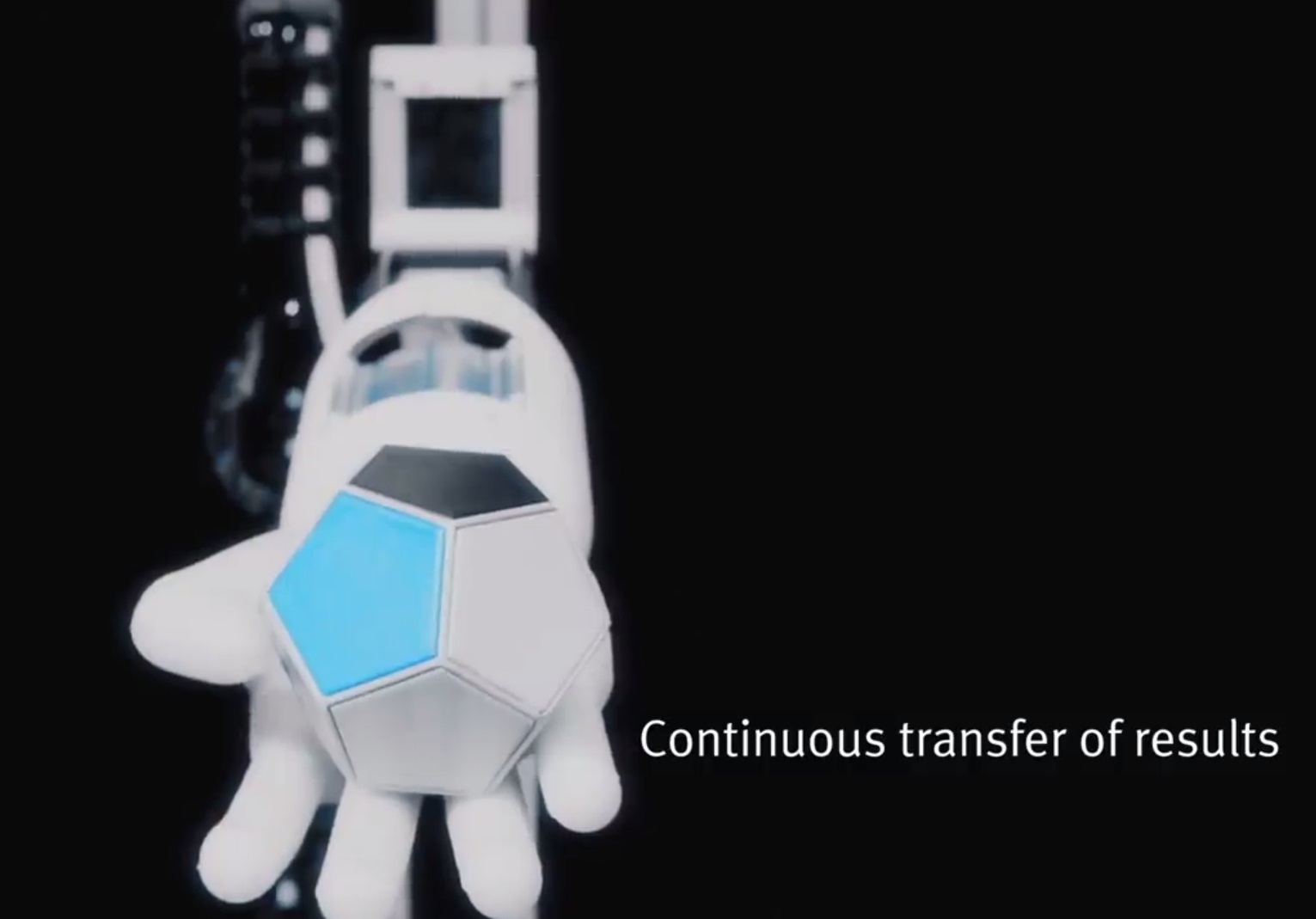

Im folgenden Demo-Video erhielten die AIs mit dem Roboterarm die Aufgabe, das 12-seitige Objekt in der Hand so zu bewegen, dass ein bestimmtes Gesicht nach oben blickte, ohne die Schritte zur Ausführung dieser Aufgabe zu erläutern.
Mit einer 3D-Kamera mit Tiefenwahrnehmung erstellt die KI zunächst eine digitale Kopie des Objekts und führt sie dann in eine virtuelle Simulation mit vielen virtuellen Händen ein, die das Objekt manipulieren, bis die richtige Kombination ausgewählt ist.
Anschließend berechnet die KI die Optionen, um schnell optimale Aktionen mit dem Motiv zu finden und auszuführen, und führt sie dann in der Realität aus, wobei die Elemente von BionicSoftHand gesteuert werden.
Komponenten zur Schaffung von Elektronik Evgeny Veltistov immer näher an der Realität.