Um den Menschen zu helfen, müssen Roboter lernen, wie wir laufen.

Seit vielen Jahrzehnten können Roboter auf zwei Beinen laufen. Heute können die fortschrittlichsten humanoiden Roboter auf ebenen und abfallenden Oberflächen laufen, Treppen steigen und absteigen und sich über unwegsames Gelände bewegen. Einige wissen sogar, wie man springt. Trotz dieses Fortschritts können Roboter mit Beinen immer noch nicht in Bezug auf Geschicklichkeit, Effizienz und Zuverlässigkeit mit Menschen und Tieren verglichen werden.
Bestehende Laufroboter verbrauchen Energie und verbringen zu viel Zeit mit Training. Zu oft scheitern sie und brechen. Um die Roboterassistenten zu werden, von denen wir so lange geträumt haben, müssen diese Maschinen lernen, so zu laufen, wie wir es tun.
Wir müssen definitiv Roboter mit Beinen bauen, weil unsere Welt für Beine ausgelegt ist. Wir gehen durch Engpässe, wir gehen um Hindernisse herum, wir gehen die Treppe hoch und runter. Für Roboter auf Rädern oder Raupen ist es schwierig, sich an den Stellen zu bewegen, die wir für unseren Körper angepasst haben.
Und viele humanoide Roboter haben Beine, die genauso aussehen wie unsere - mit Hüften, Knien, Knöcheln und Füßen. Aber hier enden die Ähnlichkeiten. Wenn wir zum Beispiel die Kraft vergleichen, mit der der Roboter die Erde beim Menschen mit derselben drückt, stellt sich heraus, dass sie oft sehr unterschiedlich sind. Die meisten humanoiden Roboter, die aus frühen Beispielen industrieller Roboterarme stammen, steuern die Gliedmaßen so, dass sie sich genau auf vorgegebenen Bahnen bewegen. Das Bewegen auf zwei Beinen erfordert jedoch weniger Positionskontrolle als Kraftkontrolle und impliziert ein breites Spektrum an Flexibilität und Elastizität - in der Robotik als Compliance bekannt, die es Ihnen ermöglicht, mit unerwarteten Kontakten umzugehen.
Viele Forschungsgruppen versuchen, weniger starre Roboter zu entwickeln, die sich dynamischer und menschenähnlicher bewegen können. Das bekannteste dieser Projekte wird wahrscheinlich
Atlas von
Boston Dynamics sein , ein Humanoid, der auf hartem und weichem Boden laufen, über Baumstämme springen und sogar Backflips machen kann. Wenn wir jedoch die Bewegung der komplexesten Roboter mit Tieren vergleichen, sehen wir, dass die Maschinen nicht ausreichen.
Was fehlt uns? Technologie ist nicht das größte Problem: Die Motoren sind leistungsstark genug, die Materialien sind stark genug, Computer sind schnell genug. Die Einschränkung ist anscheinend unser Verständnis, wie Gehen funktioniert.
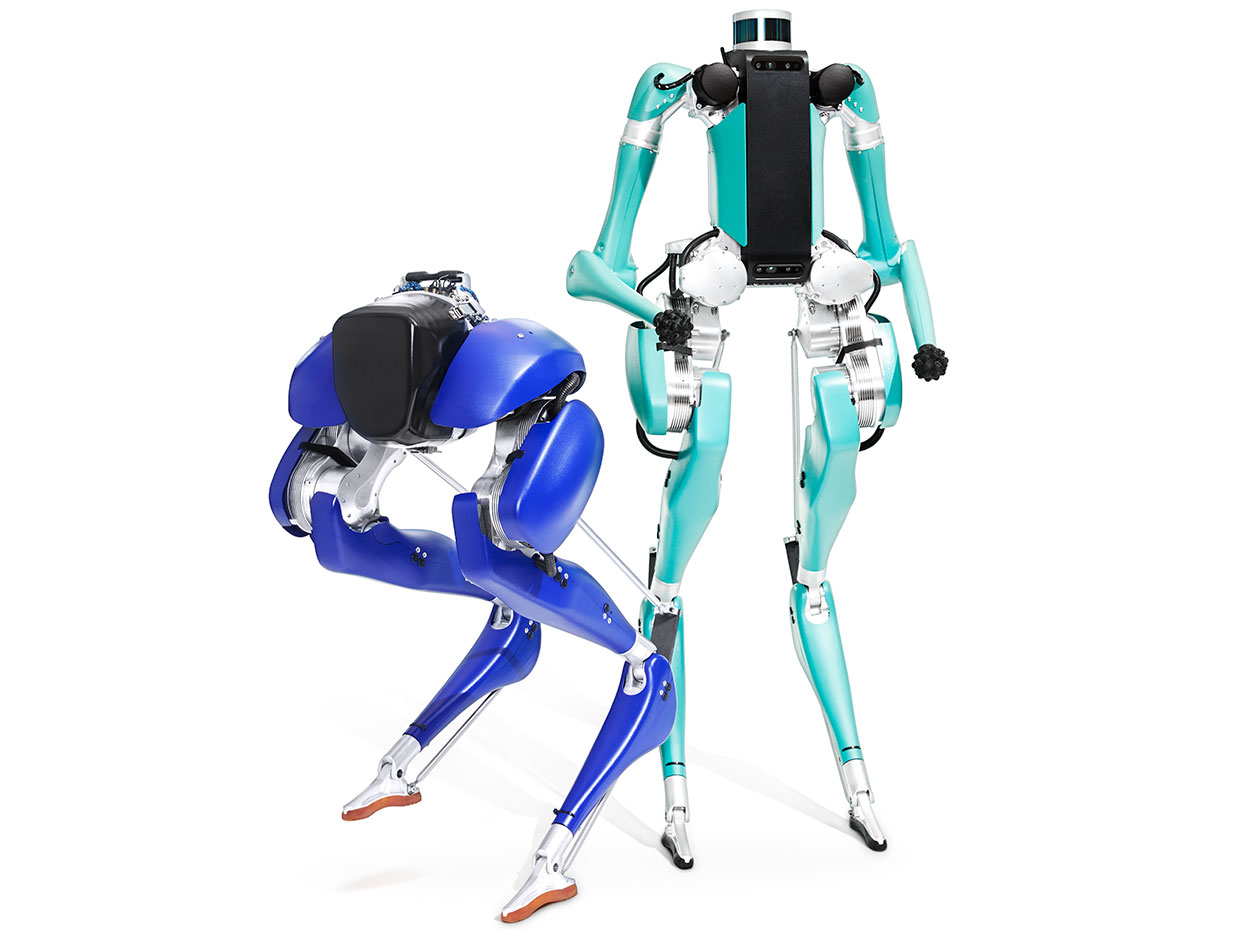 Cassie Robots (links) und Digit von Agility Robotics
Cassie Robots (links) und Digit von Agility RoboticsAm Dynamic Robotics Laboratory der University of Oregon leitete ich ein Forscherteam, das versuchte, die Grundprinzipien des Gehens herauszufinden und diese Entdeckungen auf Roboter anzuwenden. Ich bin außerdem Mitbegründer und Technologiedirektor von
Agility Robotics , einem Startup in Albany, Oregon, das sich mit der kommerziellen Verwendung von Laufrobotern befasst. 2017 haben wir Cassie die Welt geöffnet, eine zweibeinige Plattform, die wir an mehrere Forschungsteams verkauft haben. Bald wird unser neuer Roboter die Welt betreten können: Die Beine von Digit ähneln denen von Cassie, aber er hat Sensoren und ein Paar Hände, mit denen er sich stabilisiert und in Zukunft manipuliert.
Sowohl im Labor als auch im Unternehmen arbeiten wir daran, eine Zukunft zu schaffen, in der Roboter überall hingehen können, wo Menschen können. Ich glaube, dass Roboter mit dynamischen Beinen eines Tages in der Lage sein werden, ältere Menschen in ihrem Haus zu betreuen, bei Bränden und Erdbeben an Rettungsaktionen teilzunehmen und Pakete in ihre Häuser zu liefern. Beinroboter ermöglichen auch die Herstellung von Exoskeletten und Prothesen, die dazu beitragen, die Mobilität von Menschen mit Behinderungen zu verbessern. Sie bringen endlich Science-Fiction-Roboter in die Realität.
Einige Vögel laufen besser als sie fliegen oder fliegen überhaupt nicht. Strauße, Truthähne, Perlhühner und Wachteln können nicht wie ein Falke schweben, sondern bewegen sich schnell zu Fuß. Meine Kollegen vom Labor und Monica Daily vom Royal Veterinary College der University of London haben unzählige Stunden damit verbracht, die Vögel zu beobachten, die im Labor herumlaufen. Wir wollen verstehen, wie diese Tiere sich so agil und effizient bewegen können - und doch arbeiten die meisten dieser gefiederten Maschinen mit Samen!
In einem Experiment läuft ein Perlhuhn entlang eines Pfades und tritt dann auf ein Loch, das als Serviettenstück verkleidet ist. Das Tier wusste nicht, dass es in eine Grube eintreten würde, die etwa halb so lang wie seine Beine war, stolperte jedoch nicht und sein Bein streckte sich und passte sich der Rille beim Laufen an. In diesem Prozess passiert etwas Bemerkenswertes: Das Gehirn des Vogels muss sich nicht empören und auf Empörung reagieren, da seine Beine selbst damit fertig werden.
Dies gibt eine wichtige Idee für Roboterentwickler: Wenn Sie zuerst einen Roboter erstellen und ihn dann für agile Bewegungen programmieren, werden Sie keinen Erfolg haben. Wie bei Perlhühnern beruht die Geschicklichkeit eines Roboters hauptsächlich auf den mechanischen Eigenschaften seines Körpers, die von der Robotik als passive Dynamik bezeichnet werden. Und es wird in den meisten Projekten für die Entwicklung von Robotern mit Beinen vernachlässigt. Indem Sie die passive Dynamik des Roboters parallel zur Softwarefüllung sorgfältig entwickeln und in ein integriertes System integrieren, erhöhen Sie die Wahrscheinlichkeit, dass sich ein Roboter den Eigenschaften eines Tieres nähert.
Es ist erwähnenswert, dass wir, obwohl wir uns von Tieren inspirieren lassen, weder die Form des Fußes des Vogels noch den Aufbau von Muskeln und Knochen im menschlichen Fuß reproduzieren. Wir wollen die Physik der Tierbewegung verstehen und daraus ein abstraktes mathematisches Modell ableiten, das verstanden, in Computersimulationen verifiziert und in realen Robotern verkörpert werden kann. Da wir bei der Herstellung von Robotern Metall und Elektronik anstelle von Knochen und Gehirn verwenden, können sie sich mit derselben Physik stark von Tieren unterscheiden.
Eines der einfachsten mathematischen Modelle beschreibt eine Punktmasse (Rumpf), die mit einem Paar idealer Federn (Beine) verbunden ist. Dieses Federmassenmodell ist natürlich vereinfacht; Es ähnelt einem kleinen Mann aus Strichen und berücksichtigt nicht das Vorhandensein von Gelenken an den Füßen oder die Tatsache, dass die Füße den Boden an isolierten Stellen nicht berühren. Dennoch kann das Federmassenmodell zu unerwarteten Ergebnissen führen. In Simulationen kann sie fast alle Spaziergänge reproduzieren, mit denen Menschen und Tiere laufen und rennen.
 Erste Schritte: Die Beine des ATRIAS-Roboters sind nicht menschlich, aber es war die erste Maschine, die einen menschenähnlichen Gang zeigte
Erste Schritte: Die Beine des ATRIAS-Roboters sind nicht menschlich, aber es war die erste Maschine, die einen menschenähnlichen Gang zeigteUm das
Federmassenmodell zu testen, haben wir den Zweibeinroboter
ATRIAS entwickelt , dessen Name das Akronym unserer Grundannahme ist:
Angenommen , der Roboter ist eine Kugel [stellen Sie sich vor, der Roboter ist eine Kugel]. Die Idee war, dass die passive Dynamik des Roboters das Punktmassenmodell mit Federbeinen so genau wie möglich nachbilden kann.
Jedes Bein besteht aus leichten Kohlefaserstäben, die in einem Parallelogramm zusammengesetzt sind, das als Gelenk-Vierlenker bezeichnet wird.
Eine solche Struktur minimiert die Masse der Beine und ihre Trägheit und bringt das System näher an das Federmassenmodell heran. Wir haben den oberen Teil der Beine mit Glasfaserfedern ausgestattet, die „Feder“ des Modells physisch realisiert, Kollisionen mit dem Boden verarbeitet und mechanische Energie gespeichert.
ATRIAS konnte zunächst kaum stehen und wir stützten es mit einer oberen Leine. Aber wir haben die Steuerung verbessert, die die Geschwindigkeit und Neigung des Körpers verfolgt, und der Roboter hat zuerst die ersten Schritte unternommen und ist dann frei im Labor herumgelaufen. Dann lernte ATRIAS, sich von Störungen zu erholen - in einem Experiment warfen meine Schüler Bälle auf ihn. Wir haben ATRIAS auch zum Universitätsfußballfeld gebracht, es auf eine Höchstgeschwindigkeit von 7,6 km / h beschleunigt und dann schnell angehalten.
Um besser zu verstehen, was der Roboter tat, stellen Sie sich vor, Sie hätten die Augen verbunden, gehen auf Stelzen und Ihr Körper ist in einen Teppich gewickelt, und Sie können Ihre Hände nicht zum Ausbalancieren verwenden. Sie können nur weiter gehen - das hat ATRIAS getan. Er konnte sogar Hindernisse bewältigen, zum Beispiel mit einem Haufen Brennholz auf dem Weg.
Und obwohl Geschicklichkeit ein wichtiger Bestandteil war, war es auch sehr wichtig, Energie zu sparen. Wir haben die Kosteneffizienz des Roboters durch Messung eines Parameters bestätigt, der als Transportkosten [COT] bezeichnet wird. Es ist definiert als das Verhältnis von Energieverbrauch (Leistung) zum Produkt aus Gewicht und Geschwindigkeit und wird verwendet, um die Energieeffizienz von sich bewegenden Tieren und Maschinen zu vergleichen. Je niedriger der COT, desto besser. Bei einer gehenden Person beträgt der SOT 0,2, und bei einem normalen humanoiden Roboter ist diese Zahl viel höher - nach
einigen Schätzungen von 2 bis 3. Unsere Experimente haben
gezeigt, dass bei ATRIAS im Walking-Modus die COT 1,13 beträgt, was die
Wirksamkeit dynamischer Roboter demonstriert. Tatsächlich könnte ATRIAS mit mehreren Lithium-Polymer-Batterien - wie sie beispielsweise in funkgesteuerten Autos verwendet werden - etwa eine Stunde lang arbeiten.
Wir haben auch
die Kraft gemessen, mit der der Roboter auf den Boden drückt. Wir setzen ATRIAS mit einem Gewicht von 72,5 kg (ungefähr so groß wie eine durchschnittliche Person) auf eine Kraftplattform - dieses Werkzeug wird in der Sportmedizin häufig verwendet, um den Gang einer Person durch Messung der Reaktionskräfte zu messen. Beim Gehen mit dem Roboter haben wir Daten über die Kräfte aufgezeichnet. Dann trat einer meiner Schüler an die Stelle von ATRIAS, und wir zeichneten seine Schritte auf. Nachdem wir ein Diagramm der Abhängigkeit der Stützreaktion in der Zeit erstellt hatten, sahen wir, dass es genau mit dem Diagramm des Roboters übereinstimmt. Soweit wir wissen, ist dies die realistischste Umsetzung der Dynamik des menschlichen Ganges von Robotern heute.
Die Ergebnisse bestätigten, dass ein einfaches dynamisches Feder-Masse-System in einem Roboter implementiert werden kann. Es hat viele nützliche Eigenschaften wie Effizienz, Zuverlässigkeit und Flexibilität und geht dem Weg auf den Grund. Es ist Zeit, den nächsten Roboter zu erstellen.
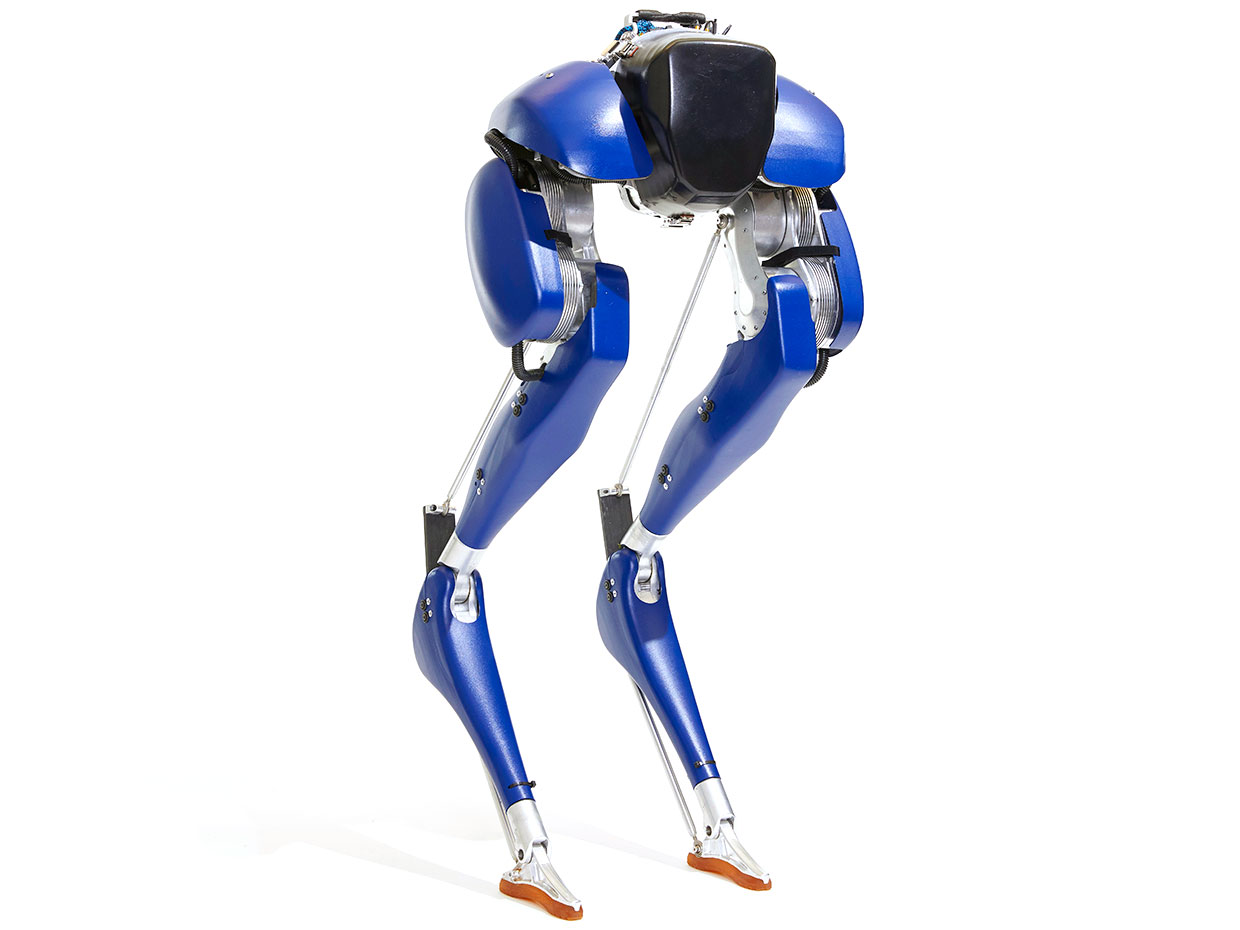 Cassie benutzt fünf Motoren und zwei Federn an jedem Bein, um sich in schwierigem Gelände zu bewegen.
Cassie benutzt fünf Motoren und zwei Federn an jedem Bein, um sich in schwierigem Gelände zu bewegen.Cassie ist wie ATRIAS ein dynamischer Laufroboter. Wir haben alle Aspekte seines Designs optimiert, um einen zuverlässigen und leistungsfähigen Roboter zu schaffen, der für die Kommerzialisierung geeignet ist. Und wir haben die Messlatte hoch gelegt: Wir wollten, dass Cassie durch den Wald rennen, über unwegsames Gelände laufen und mehrere Stunden ohne unterstützende Federung mit Batteriestrom arbeiten kann.
Cassie basiert auf den gleichen Konzepten, die für ATRIAS verwendet wurden, aber wir haben beschlossen, ihre brandneuen Beine herzustellen. Zuvor verwendeten wir zwei Motoren, um jeweils vier Glieder an jedem Bein anzutreiben. Ein solches Schema minimiert ihre Masse, hat jedoch einen Nachteil: Beim Gehen verlangsamte ein Motor den anderen, was zu Energieverlusten führte. Während der Arbeit an Cassie haben wir andere Beinkonfigurationen untersucht, um diesen Effekt zu beseitigen. Mit dem neuen Schema können Sie Motoren kleiner machen, und der Roboter ist noch effizienter als ATRIAS.
Es ist wichtig zu beachten, dass Cassies Beinkonfiguration das Ergebnis dieser Analyse war. Die Tatsache, dass der Fuß dem Fuß eines Straußes oder eines anderen
Theropoden ähnelt, könnte darauf hinweisen, dass wir auf dem richtigen Weg sind, aber wir haben nicht versucht, einen Roboter zu entwickeln, der nach dem Abdecken mit seinem Gefieder in einer Herde Emu verloren gehen könnte.
Jedes Bein von Cassie hat fünf Bewegungsachsen - oder Freiheitsgrade, die roboterhaft sprechen - und jedes hat seinen eigenen Motor. Hüften haben wie unsere drei Freiheitsgrade, wodurch sich das Bein in jede Richtung drehen kann. Zwei weitere Motoren haben Achsen im Knie und im Fuß. Cassie hat zusätzliche Freiheitsgrade im Unterschenkel und im Knöchel; Sie sind passiv und werden nicht von Motoren gesteuert, sondern an Federn befestigt, die es dem Roboter ermöglichen, sich durch schwieriges Gelände zu bewegen, ohne Plattfuß-Humanoiden ausgesetzt zu sein.
Cassies neue Beine erforderten die Schaffung eines ausgefeilteren Low-Level-Controllers als ATRIAS. ATRIAS streckte sein Bein aus und übte einfach die gleiche Stärke und das entgegengesetzte Drehmoment beider Motoren aus. Bei Cassie müssen für die Bewegung der Beine in eine bestimmte Richtung unterschiedliche Drehmomente für unterschiedliche Motoren berechnet werden. Dazu muss die Steuerung die Trägheit der Beine und die Dynamik der Motoren und Getriebe berücksichtigen.
 Controller Cassie verwendet geplante Schritte und dynamisches Balancing
Controller Cassie verwendet geplante Schritte und dynamisches BalancingJa, die Aufgabe des Controllers ist schwieriger geworden, aber mit dieser Methode können Sie effizienter gehen und ein breiteres Verhaltensspektrum verwenden. Cassie kann mit einem der ersten Controller mit einer Geschwindigkeit von bis zu 5 km / h laufen. Der Stromverbrauch variiert zwischen 100 Watt (stehend) und 300 Watt (in Bewegung). Mit einem Lithium-Ionen-Akku kann er 5 Stunden lang betrieben werden. Außerdem ermöglichen neue Beine Cassia, auf eine Weise zu manövrieren, die ATRIAS nicht konnte. Und dank des Motors im Fußgelenk kann es stehen, ohne sich ständig bewegen zu müssen, wie es ATRIAS getan hat.
Cassie wiegt nur 31 kg, zweimal weniger als ATRIAS. Zwei Cassie können in weniger als einer Minute in den Kofferraum eines Autos geladen werden. Es ist auch zuverlässiger: Seine Teile bestehen aus Aluminium und Kohlefaser, und die Schutzhülle besteht aus strapazierfähigem Kunststoff-Acryl-Polyvinylchlorid und schützt es vor Kollisionen und Stürzen.
Bisher weiß Cassie nicht, wie sie durch den Wald rennen soll. Aber wir haben sie ohne Versicherung nach draußen gefahren, und sie geht auf dem Boden, Gras und Laub. Jetzt untersuchen wir das Problem der Integration des dynamischen Verhaltens eines Roboters in die
Bewegungsplanung , die es ihm beispielsweise ermöglicht, Treppen zu steigen. Wir arbeiten auch an einer weiteren Funktion, die Cassie-Roboter nützlicher macht: Hände.
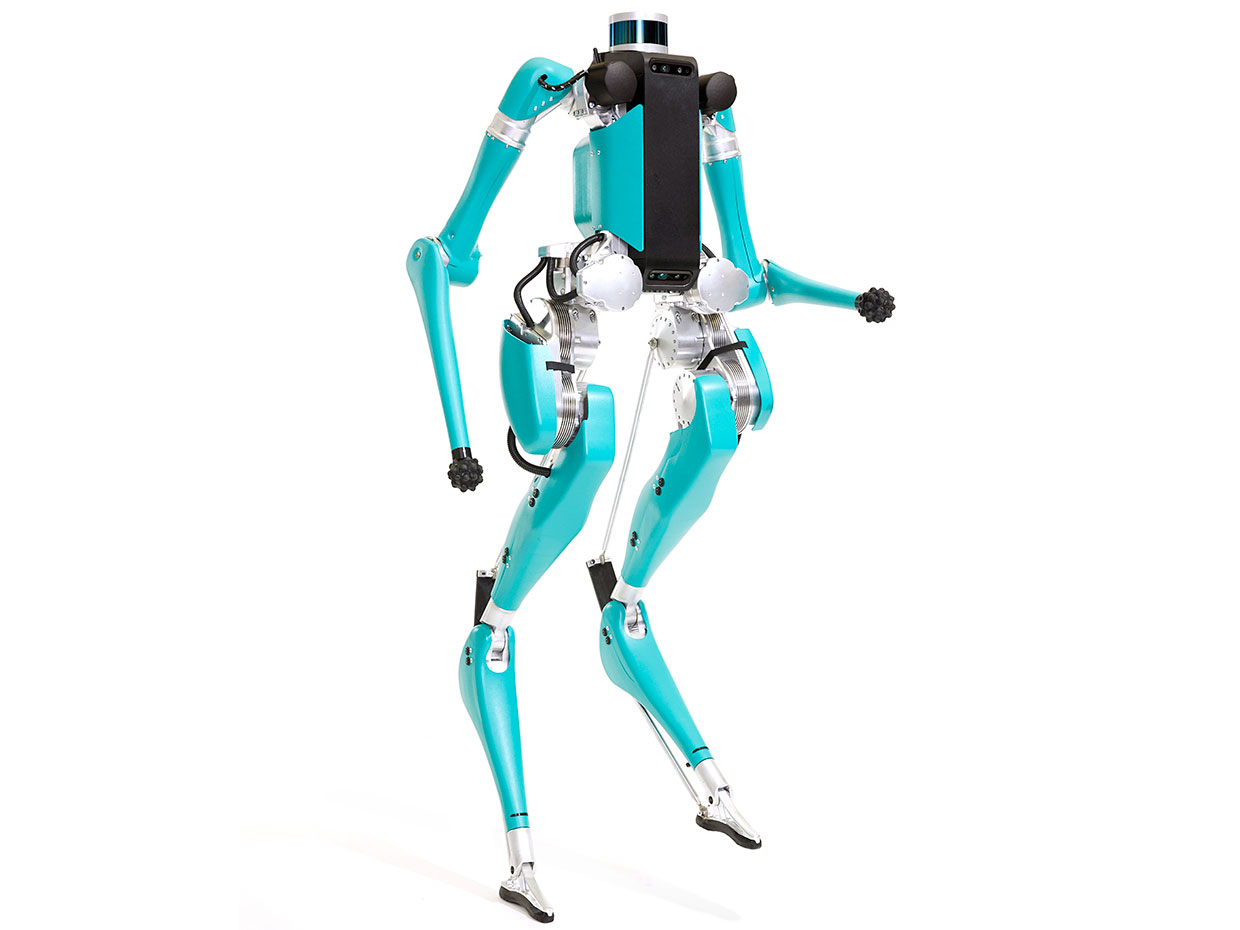 Digit hat Beine wie Cassie, aber er hat auch einen Körper mit Sensoren und zwei Händen, die ihm bei Beweglichkeit und Gleichgewicht helfen.
Digit hat Beine wie Cassie, aber er hat auch einen Körper mit Sensoren und zwei Händen, die ihm bei Beweglichkeit und Gleichgewicht helfen.Digit ist ein direkter Nachkomme von Cassie. Er hat ähnliche Beine, aber wir haben einen Torso mit Sensoren und zwei Händen hinzugefügt. Sie sind speziell dafür gemacht, ihm bei Beweglichkeit und Gleichgewicht zu helfen und in Übereinstimmung mit dem Gang zu schwingen. Sie erlauben Digit auch, sich im Herbst zu stützen und seinen Körper neu auszurichten, um aufzustehen.
Digit hat noch etwas, das Cassie nicht hat: eingebaute Wahrnehmung. Wir haben viele Sensoren hinzugefügt, einschließlich Lidar im Oberkörper. Sensoren helfen ihm beim Sammeln von Daten, wodurch sich der Roboter in einer Welt voller Hindernisse bewegen kann, beispielsweise in überfüllten Räumen und Stufen, und sich nur in unerwarteten Situationen und mit Sensorfehlern auf eine stabile Dynamik verlassen kann.
Digit und der Roboter mit den Beinen, die hinter ihm her sind, müssen noch viel lernen. Aber wir sind überzeugt, dass sie die Welt verändern werden. Ihr Einfluss kann mit Automobilen verglichen werden, wenn es darum geht, den Lebensstil, die Verkehrsmuster und die städtischen Systeme der Menschen zu ändern, wobei diese Roboter versprechen, die Logistik und die Paketzustellung zu verändern.
In naher Zukunft, wenn es Robomobile geben wird, werden Autohersteller und Unternehmen, die gemeinsame Reisen anbieten, wie Lyft und Uber, ihre eigenen riesigen Flotten von Autos haben, die Menschen befördern, und der maximale Verkehr wird wie heute zur Hauptverkehrszeit sein. Aber was machen diese Autos spät in der Nacht und mitten am Tag? Sie sind möglicherweise nicht im Leerlauf, transportieren jedoch Pakete von automatischen Lagern zu Ihrer Tür. Diese Autos können jedoch nur auf den Bürgersteig gelangen - es ist ziemlich schwierig, ein Paket ohne Person an eine Tür zu liefern. Und dann kommen Laufroboter ins Spiel. Sie werden in solchen Autos fahren und die letzten Meter laufen. Und obwohl Räder und Flügel einige dieser Rollen spielen können, ist in einer Welt mit zwei Beinen keine andere Bewegungsplattform so flexibel wie ein Roboter auf den Füßen.
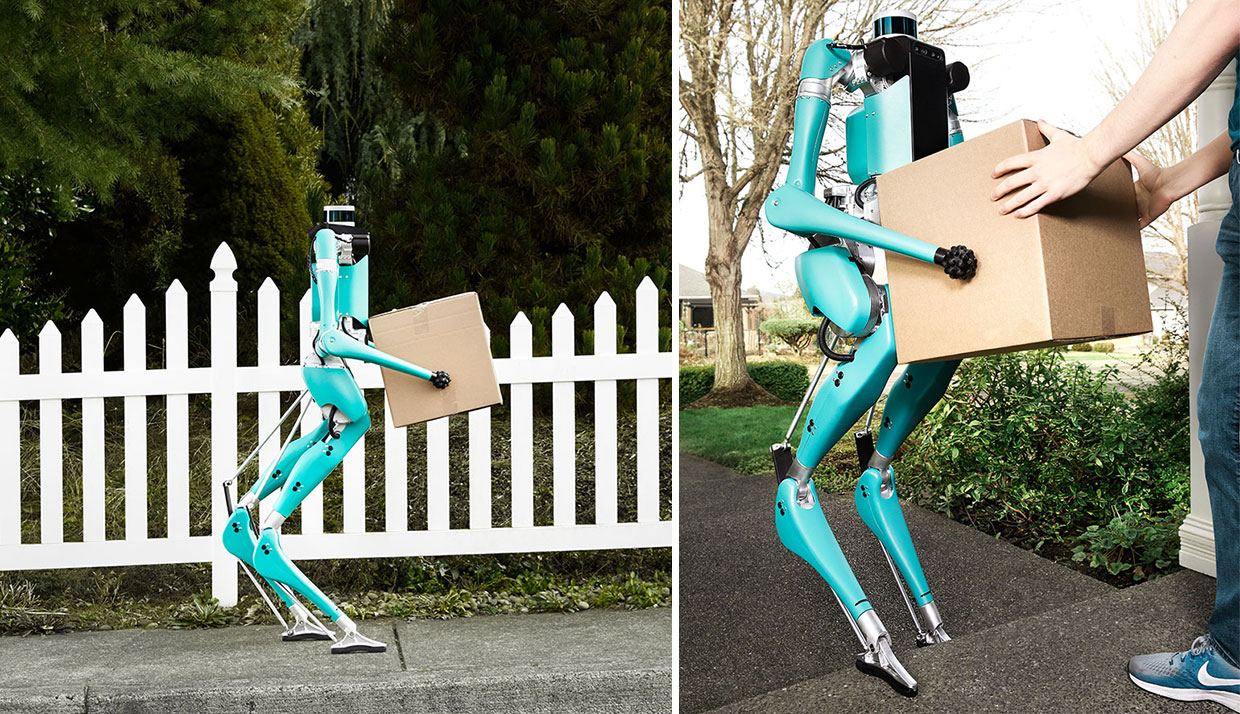 Digit lernt, in unterschiedlichem Gelände zu laufen und Treppen zu steigen, damit er eines Tages Pakete direkt an die Tür liefern kann
Digit lernt, in unterschiedlichem Gelände zu laufen und Treppen zu steigen, damit er eines Tages Pakete direkt an die Tür liefern kannLieferroboter werden Teil eines zunehmend automatisierten Logistiksystems sein, bei dem Pakete des Herstellers sofort an Ihre Haustür geliefert werden. Dieses System reduziert die Versandkosten, sodass die Zustellung von Paketen billiger ist als der Kauf in großen, gut beleuchteten, beheizten Lagern mit menschlichem Zugang. Kleine Großhandelsgeschäfte werden unnötig. Die Leute werden natürlich in der Lage sein, für einige Dinge einkaufen zu gehen. Die täglichen Produkte werden jedoch von Robotern geliefert, wodurch Sie Zeit und Geld sparen.
Biped-Roboter können in unsere Häuser und Büros eindringen. Sie können nach oben und in überfüllten Räumen gehen, mit Menschen auf sicherer Augenhöhe und auf menschlicher Ebene interagieren, wodurch wir in unseren Häusern angemessen altern können. Sie helfen beim Tragen von Dingen und arbeiten als Geräte der Fernpräsenz, die es Familienmitgliedern und Freunden ermöglichen, den Roboter zu verwenden, um mit Menschen aus der Ferne zu kommunizieren und ihnen Gesellschaft zu leisten.
Roboter an ihren Füßen können dorthin gelangen, wo Menschen gefährlich sind. Sie werden in Waldbrände fallen, um Echtzeitdaten zu sammeln, auf der Suche nach Bewohnern auf brennende Gebäude stoßen und Katastrophengebiete wie das Kernkraftwerk Fukushima betreten, um schwer erreichbare Gebiete zu erkunden. Sie werden regelmäßig das Innere von Wasserkraftwerken und stillgelegten Minen inspizieren, damit wir dies nicht tun müssen.
Um in diese Zukunft zu gelangen, müssen wir viele Probleme lösen. Ich bin jedoch davon überzeugt, dass die Robotik-Community diese Technologie praktisch umsetzen kann. Dies wird ein kleiner Schritt für den Roboter und ein großer Sprung für die gesamte Menschheit sein.