Wie die Zeit vergeht! Der vierte Erdmonat der Arbeit auf der anderen Seite des Mondes des Chang'e-4-Landemoduls und des Yutu-2-Rovers ist bereits eingetroffen. Die Geräte überlebten in der dritten Mondnacht eine Zeit extrem niedriger Temperaturen. Jetzt haben sie den Schlafmodus verlassen und neue Untersuchungen der Mondoberfläche und des Weltraums begonnen.
Welche Kameras sind auf dem Chang'e-4-Modul und dem Yutu-2-Rover installiert, und was nehmen die Kameras an langen Mondtagen auf?
Zuvor veröffentlichte Materialien zur Chang'e-4-Mission: Derzeit sind 88 Tage (2212 Stunden) vergangen, nachdem der Yutu-2-Rover auf der Mondoberfläche gelandet ist, und 115 Tage (2760 Stunden), nachdem der Yutu-2-Rover im Rahmen der Chang'e-4-Mission zum Mond vom Sichan-Kosmodrom gestartet wurde.
Vierter Mondtag auf der anderen Seite des Mondes:
Die geplante Dauer des Landemoduls beträgt ein Jahr, der Rover drei Monate.
Tatsächlich hat der Yutu-2-Rover bereits seine geschätzte Lebensdauer von 2160 Stunden erreicht.
Dies ist kein Rekord für die Chang'e-Mondmissionen, der erste Chang'e-3-Lander, der sich seit Dezember 2013 auf dem sichtbaren Teil des Mondes befindet und noch Lebenszeichen zeigt (Telemetrie und Daten von verschiedenen Instrumenten), aber sein Partner dabei Die Landung - der erste Rover „Yutu“, der 40 Tage nach Beginn der produktiven Arbeiten an der Mondoberfläche bis Mitte 2016 an Mobilität verlor, übertrug Daten stationär an das MCC.
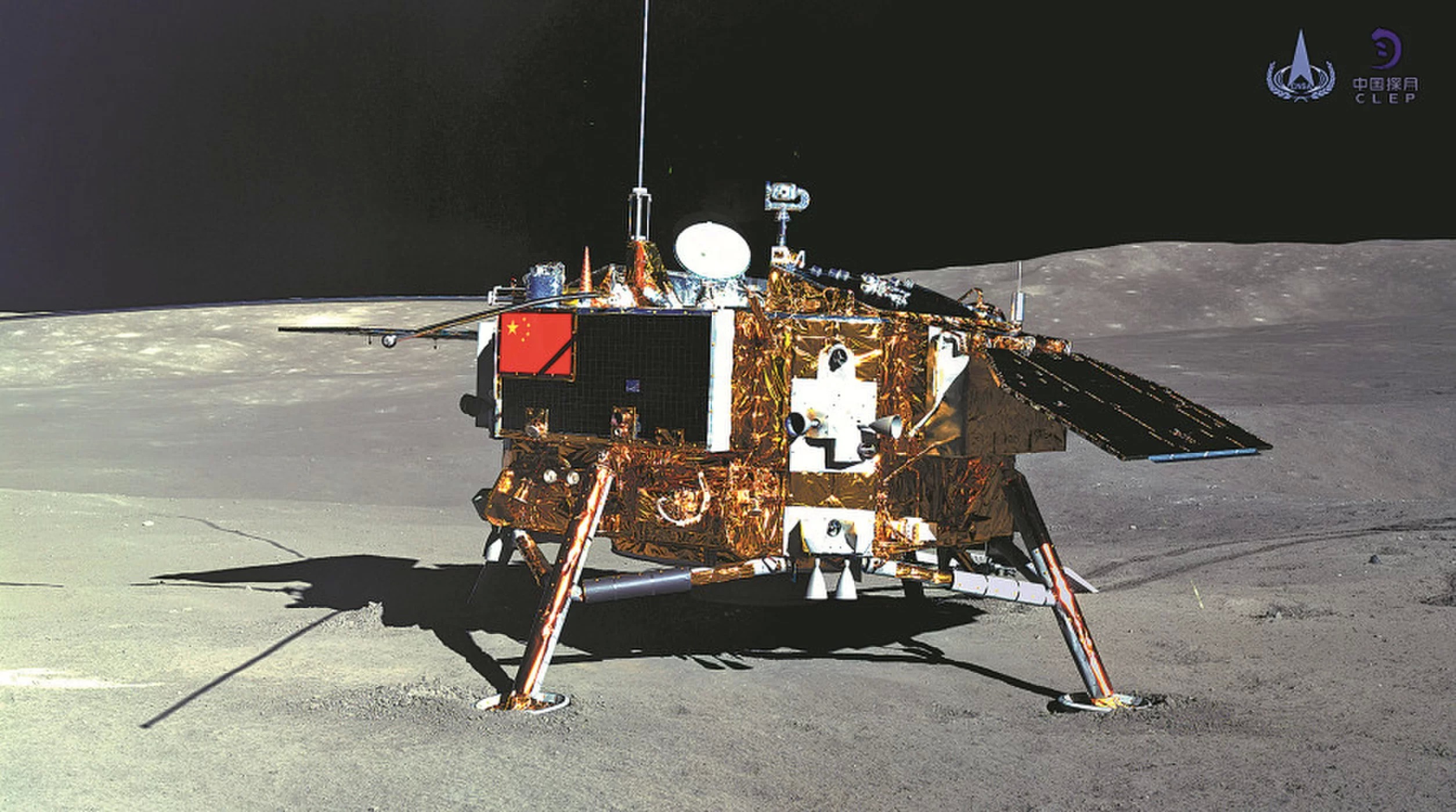
Daten zu den Modulen der Mondmission "Chang'e-4":- Abstiegsmodul „Chang'e-4“ (4,4 m zwischen gegenüberliegenden Landestützen, Gewicht 1200 kg);
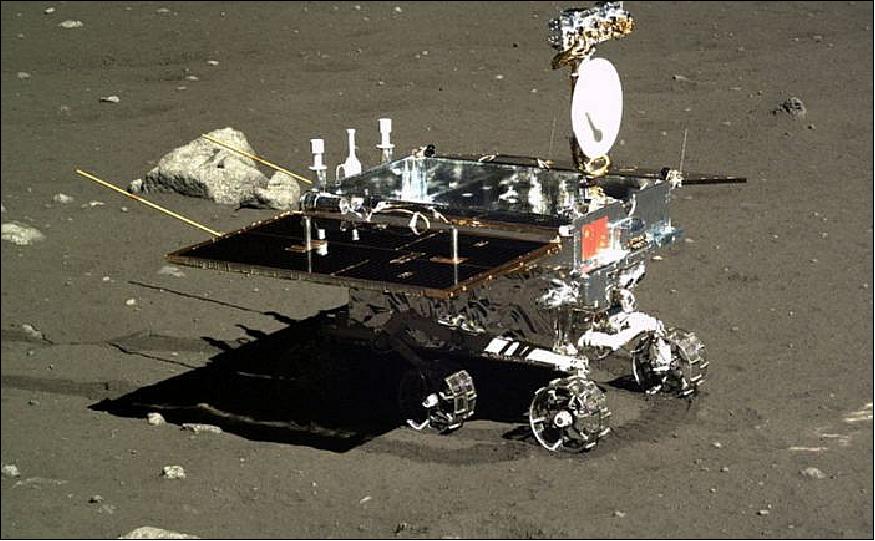
- Yutu-2-Rover (Höhe 1 Meter, Breite 1 Meter (ohne Sonnenkollektoren), 1,5 Meter Länge, zwei zusammenklappbare Sonnenkollektoren, sechs Räder, Gewicht 140 kg).
 Neue Fotos von der Rückseite des Mondes
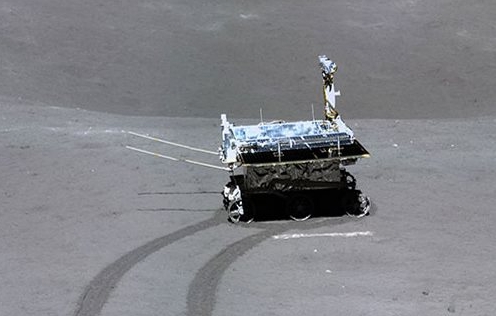
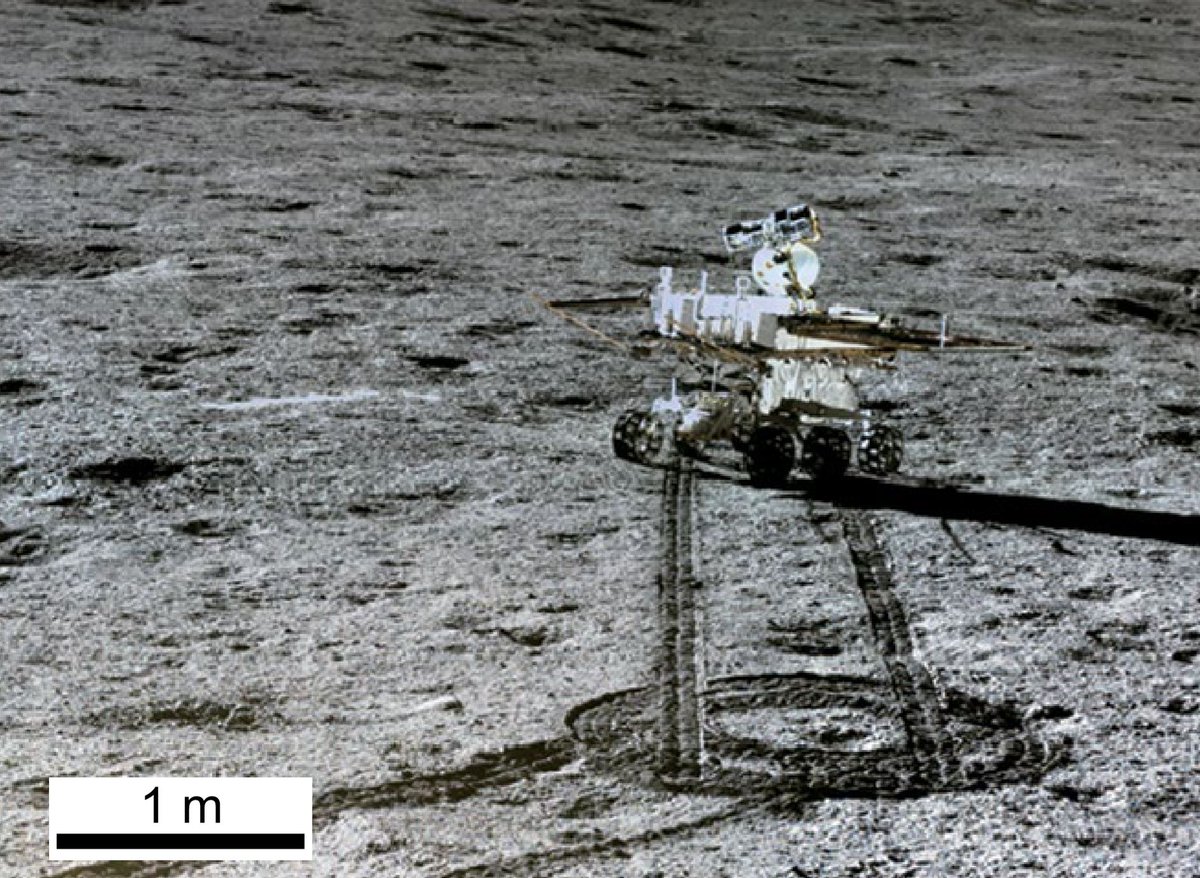
Neue Fotos von der Rückseite des MondesDie Mondspur von den Rädern des Yutu-2-Rovers und der Schatten von Antenne und Plattform mit einer Panoramakamera:

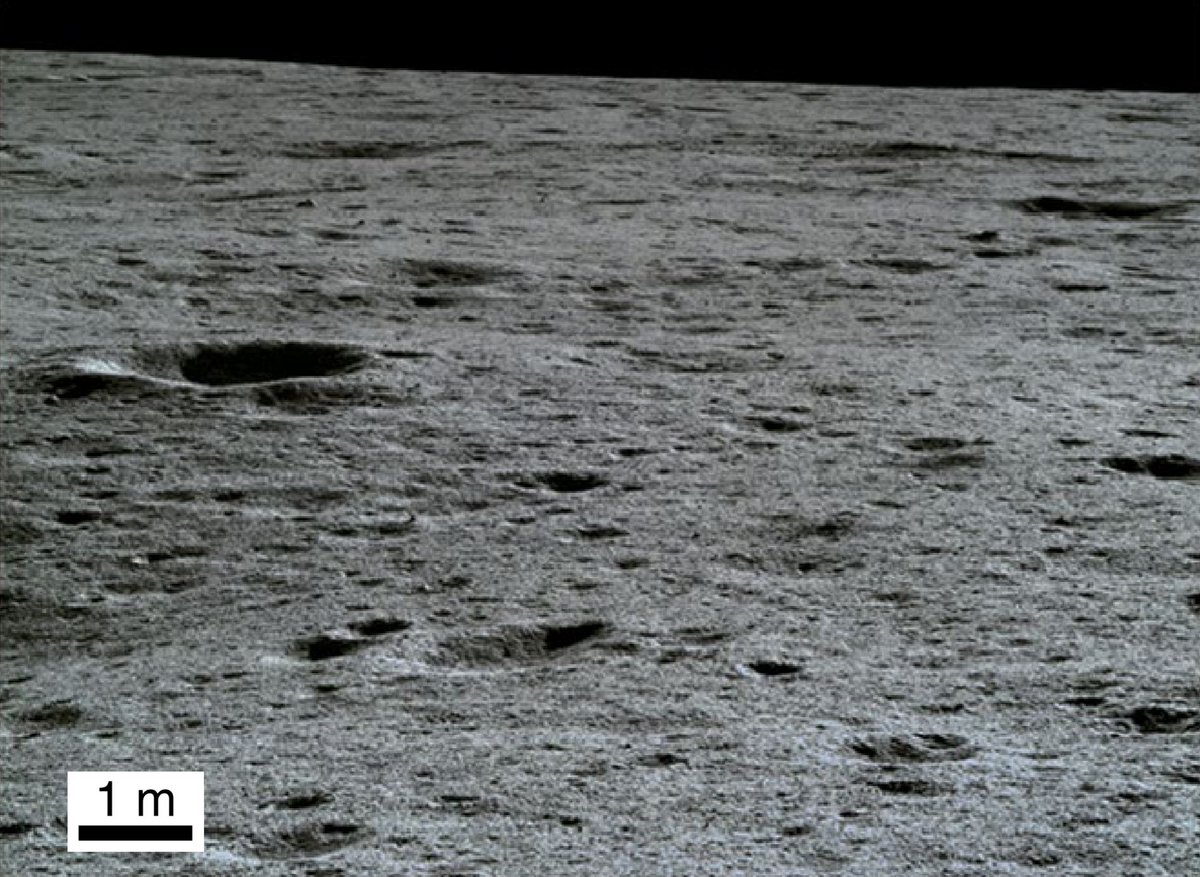
Mehrere Krater (mit schönen Schatten) und Berge im Hintergrund:

Und dies sind Fotos aus dem wissenschaftlichen Artikel „Lunar Farside to Exploring by Chang'e-4“ in der April-Ausgabe von Nature Geoscience.

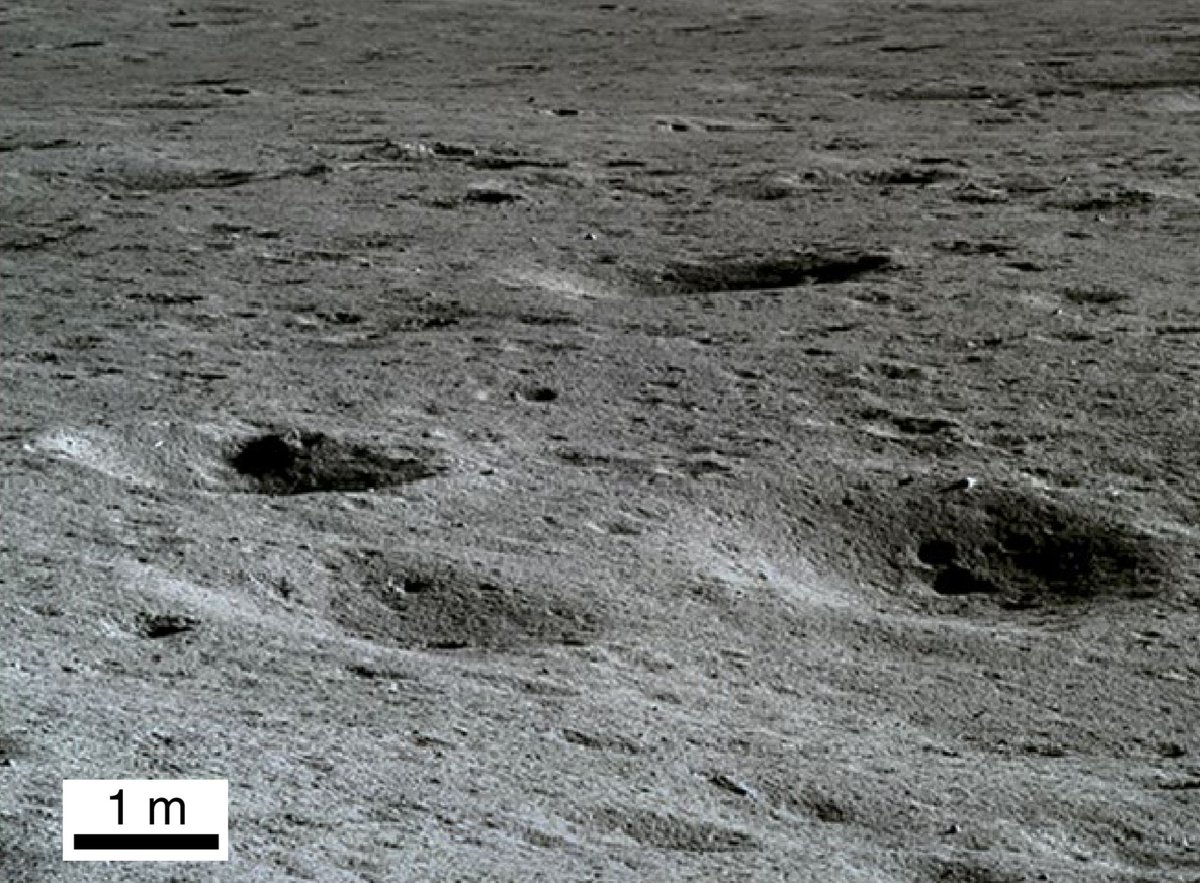
Kleine Krater in der Nähe des Landeplatzes:
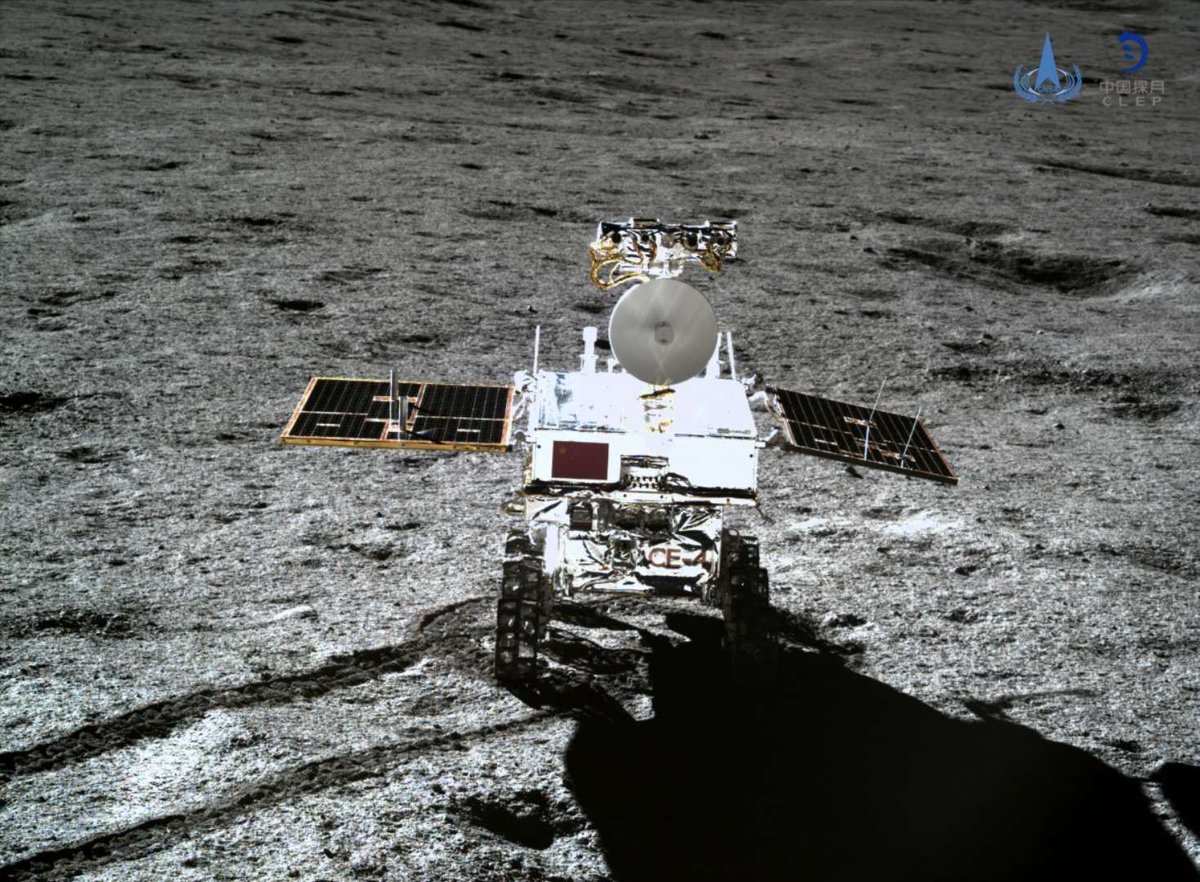
Rover "Yutu-2" erforscht die Oberfläche des Mondes:
Fragmente von Steinen in kleinen Kratern (Foto vom Yutu-2-Rover):
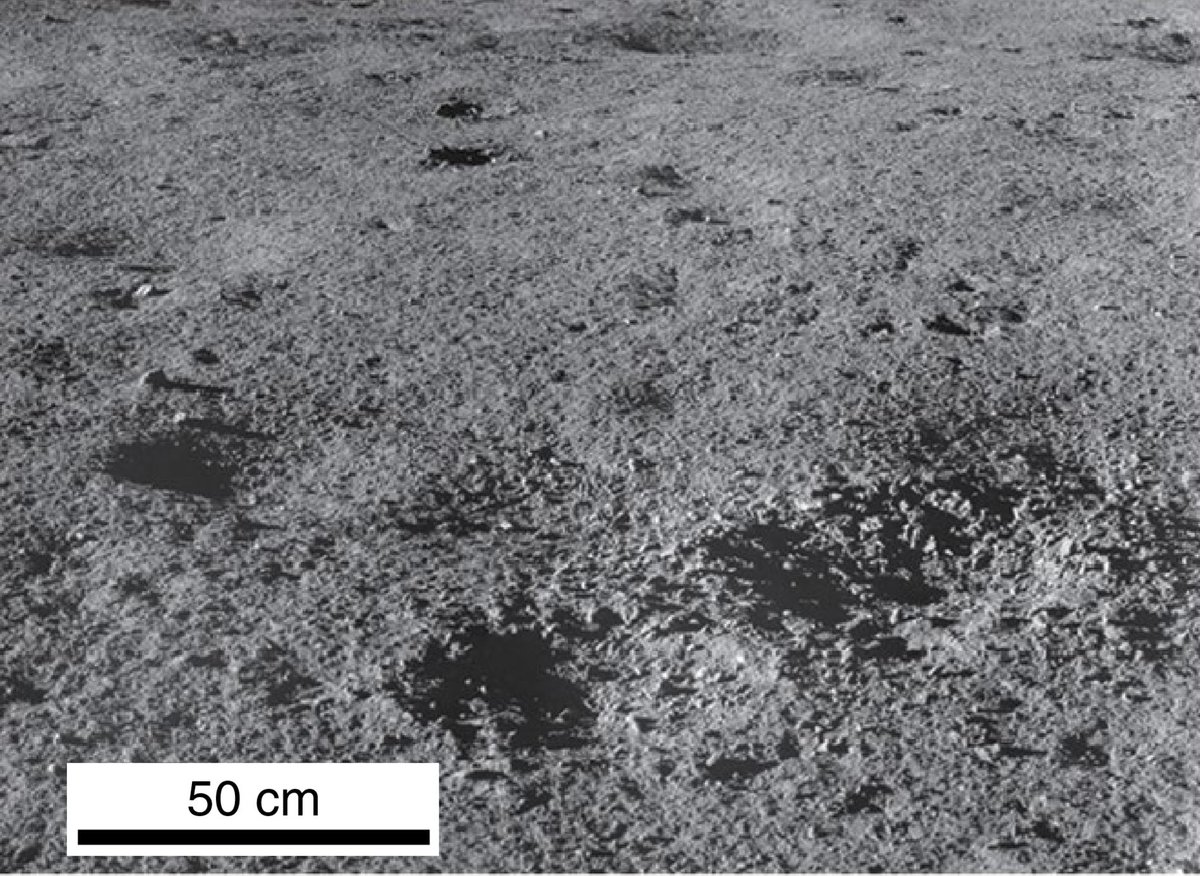
Kleine Steine entlang des Yutu-2 Rovers:

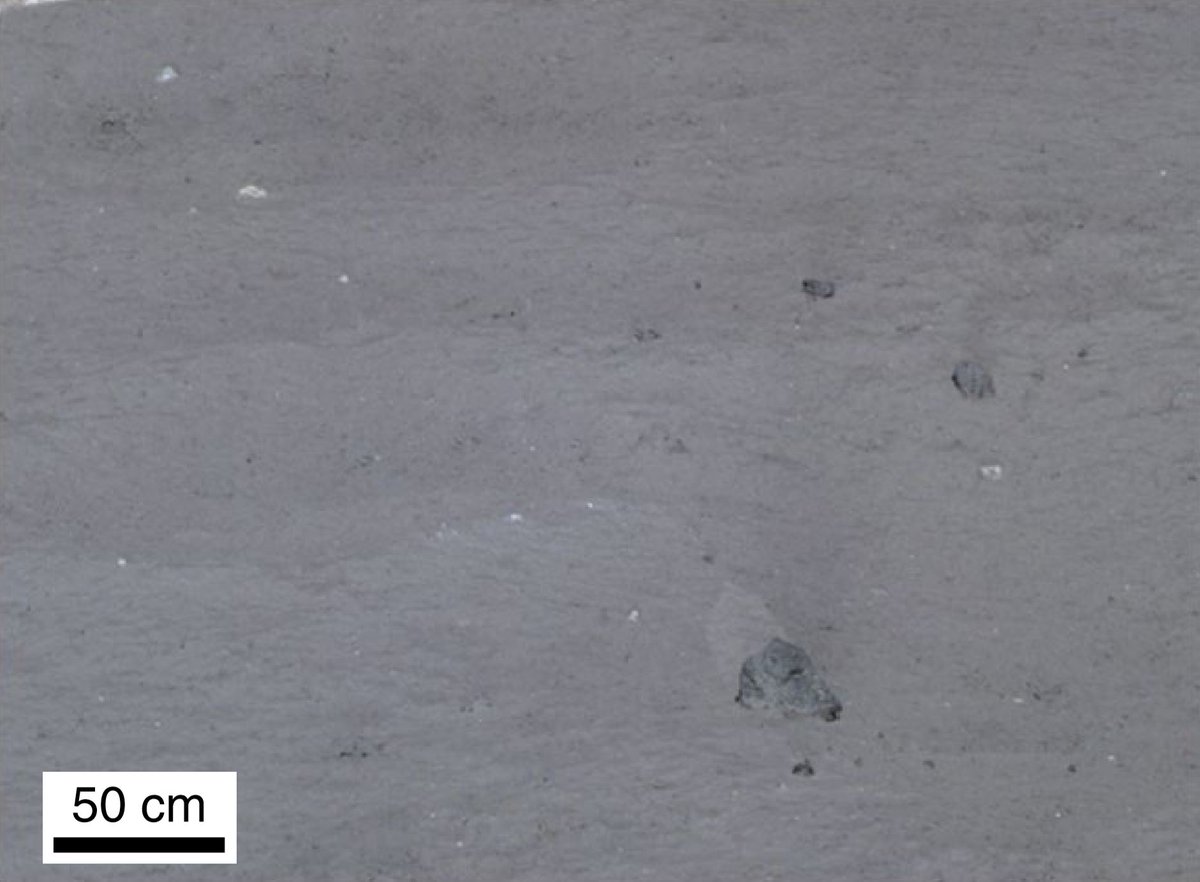
Sehr ungewöhnliche dunkle Steine in der Nähe des Landeplatzes:
 Welche Kameras sind auf dem Chang'e-4-Modul und dem Yutu-2-Rover installiert?Auf dem Landemodul Chang'e-4 sind zwei Kameras installiert:
Welche Kameras sind auf dem Chang'e-4-Modul und dem Yutu-2-Rover installiert?Auf dem Landemodul Chang'e-4 sind zwei Kameras installiert:
- Landekamera (Landekamera - LCAM);
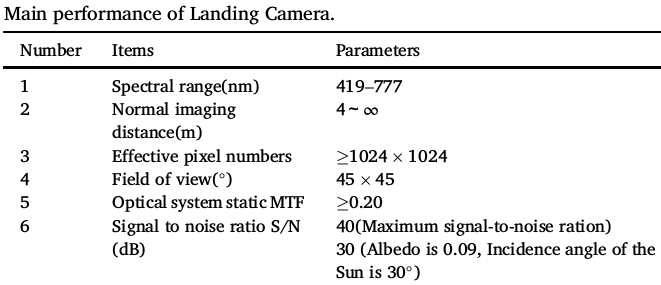
- Landschaftskamera (Geländekamera - TCAM).Die LCAM-Landekamera (0,5 kg, Größe 116 x 100 x 70,4 mm) wurde an der Unterseite des Chang'e-4-Moduls installiert und in einer Höhe von 12 km über der Mondoberfläche automatisch eingeschaltet, um den Landevorgang mit einer Auflösung von 1024 x 1024 Pixel und 10 Bildern pro Sekunde aufzuzeichnen.
Video des Landevorgangs von der LCAM-Kamera - mehrere tausend Bilder werden in einem Video gesammelt
LCAM Landekammer Merkmale:
Das Schaltbild der Elemente des Landekammer-LCAM:
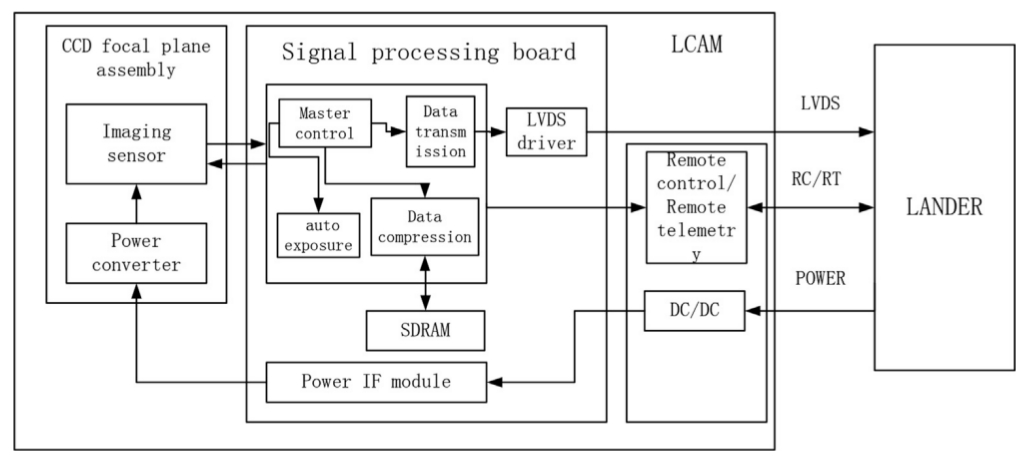
Die Datenübertragung erfolgt über die LVDS-Schnittstelle (Low Voltage Differential Signaling).
Nach der Landung auf dem Mond erfasst die LCAM-Kamera nur denselben Rahmen mit der Landeunterstützung:

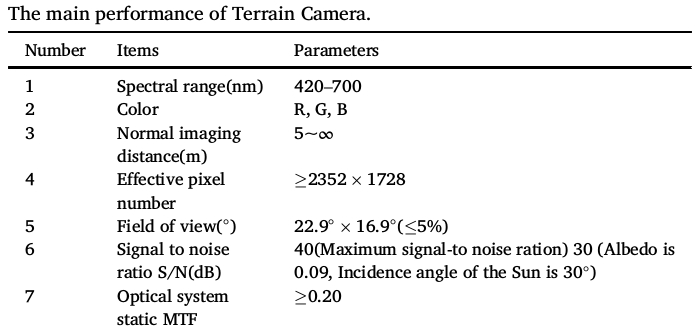
Die TCAM-Landschaftskamera (0,64 kg, Größe 92 x 105 x 118,9 mm) ist am höchsten Punkt des Chang'e-4-Landemoduls an einer speziellen Halterung installiert, mit der sich die Kamera um 360 Grad um ihre Achse drehen und die Kamera bis zu einem Winkel von bis zu 120 nach oben oder unten neigen kann Grad. Panoramaaufnahmen der Oberfläche und der Elemente des Landemoduls, die Verfolgung des Rovers und die Erkundung des Bereichs um die Landezone sind TCAM-Funktionen.
Merkmale der TCAM-Landschaftskamera:
Kommunikationsschema der Elemente der Landschaftskamera TCAM:
Panorama des Landeplatzes:

LCAM- und TCAM-Kameras am Landemodul:

Das Chang'e-4-Landemodul arbeitet im stationären Modus und seine Fotos der Oberfläche in der Landezone sind zuallererst sehr wichtig, um zu verstehen, welche Arten von Oberflächen sich tatsächlich um das Modul herum befinden. Immerhin gibt es eine große Anzahl kleiner Krater und Steine, die (im schlimmsten Fall) das Verfahren zum Absenken des Rovers beeinträchtigen können. Da das Chang'e-4-Modul nach der Landung seine Position nicht ändern und in eine andere Zone „springen“ kann, die für die Landung bequemer ist.
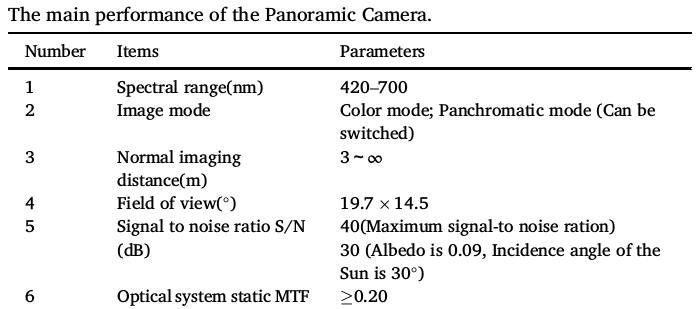
Der Yutu-2 Rover verfügt über eine Doppelpanoramakamera (Panoramakamera - PCAM).Die PCAM-Panoramakamera (0,69 kg, Größe 90 x 110 x 120 mm) ist am höchsten Punkt des Yutu-2-Rovers auf einer speziellen breiten Masthalterung installiert, mit der sich die Kamera um 360 Grad um ihre Achse drehen kann, um einen Panoramablick auf die Oberfläche aufzunehmen.
Da die Kamera aus zwei identischen Modulen besteht, werden sie verwendet, um ein 3D-Bild unter Verwendung der binokularen Stereobildgebungsmethode zu erstellen. Um ein Farbbild in einer PCAM-Kamera zu erhalten, wird ein Bayer-Filter (Arrays von Farbfiltern) verwendet.
Merkmale der Panorama-PCAM-Kamera:
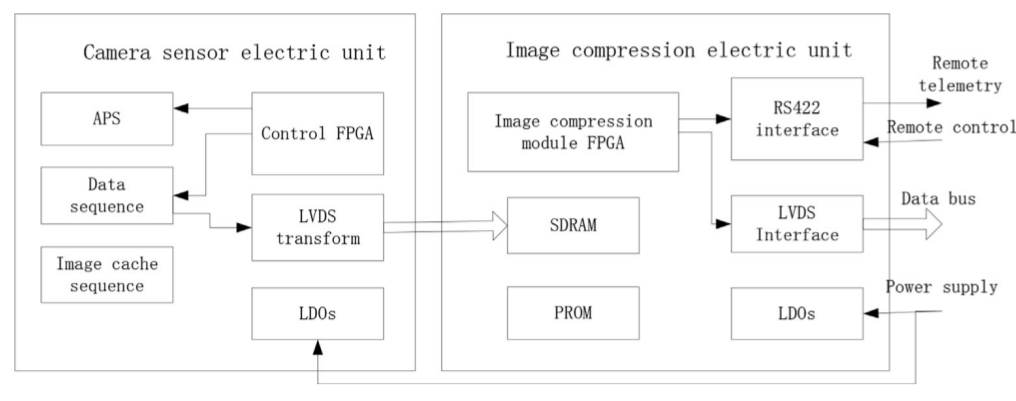
Kommunikationsschema der Elemente einer Panorama-PCAM-Kamera:

Gesamtansicht des Oberflächenpanoramas vom Yutu-2-Rover:

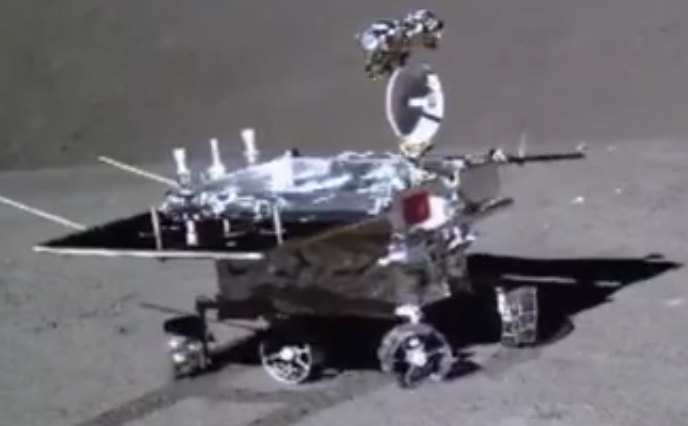
PCAM-Kamera am Rover:

Am 3. Januar 2019 begann nach Abschluss aller Phasen des erfolgreichen Landevorgangs und der Installation unabhängiger Kommunikationskanäle mit Chang'e-4-Geräten (dem Landemodul und dem Rover) die Ära des Fotos der Untersuchung der anderen Seite des Mondes.
Fotos von Kameras:Panoramakamera PCAM (Rover): Der Yutu-2-Rover ist ein mobiler und hochproduktiver Raumfahrtpartner des Chang'e-4-Landemoduls.
Der Yutu-2-Rover fuhr über 160 Meter entlang der komplexen Oberfläche der anderen Seite des Mondes.
Der Yutu-2-Rover-Pfad in drei Mondtagen:


Es ist interessant, wie die Vorderräder beim Yutu-2-Rover beim Einlenken funktionieren:

Video vom Start des Rovers "Yutu-2"
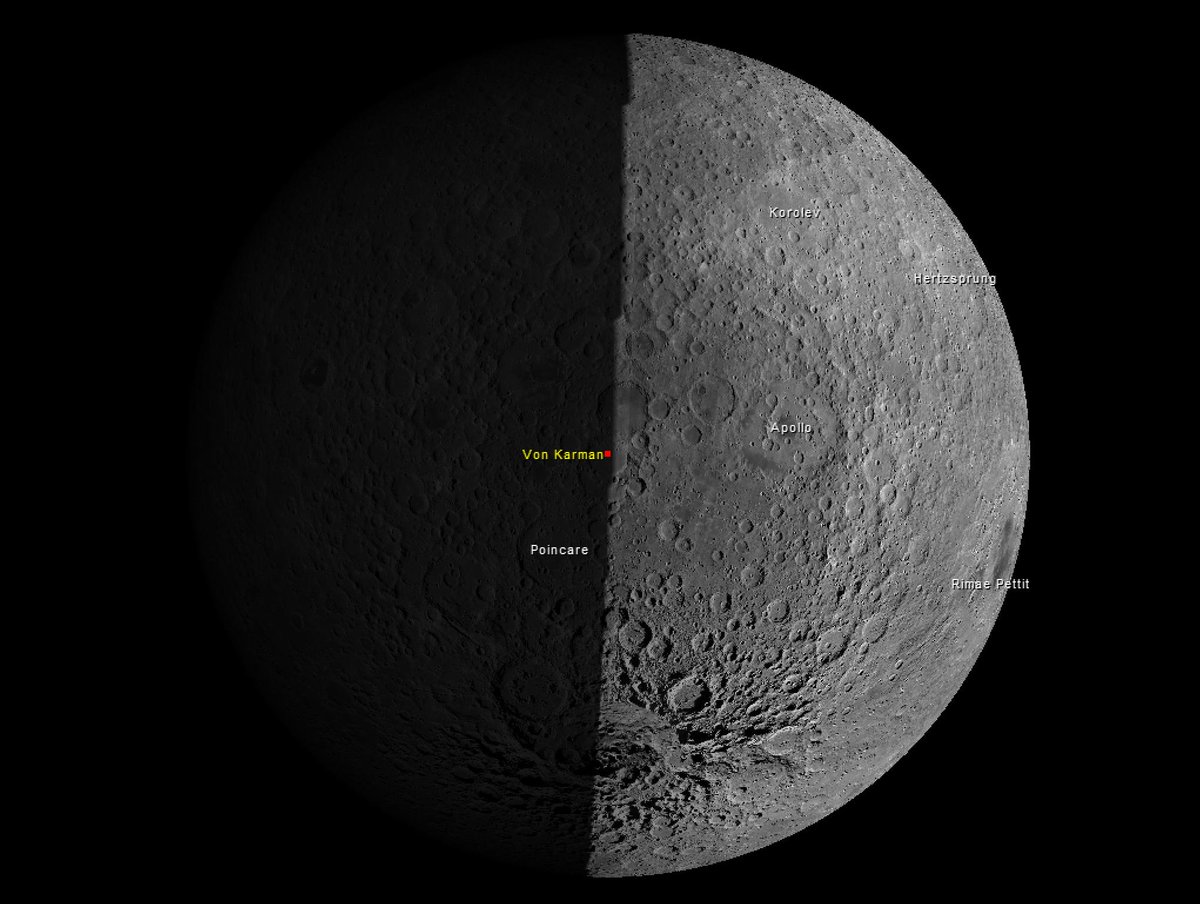
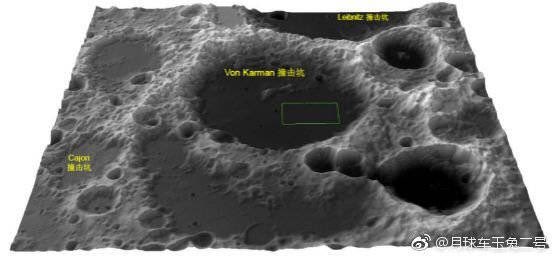
Der Landeplatz der Chang'e-4-Mission: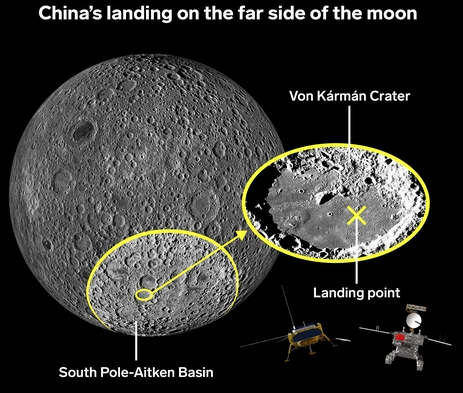
Da die Rückseite des Mondes auch ein komplexeres Relief aufweist als die von der Erde aus sichtbare Seite, stieß der Yutu-2-Rover beim Bewegen entlang der Oberfläche auf schwerwiegendere motorische Probleme und Störungen als die zuvor von seinem Vorgänger, dem Rover, angetroffenen Yutu ", im Dezember 2013 an die Mondoberfläche geschickt.
Leider war der erste Yutu-Rover der Chang'e-3-Mission am 25. Januar 2014 nach Überwindung von 114,8 Metern auf einer komplexen Mondoberfläche technisch immobilisiert (Beschädigung von Elementen infolge einer Kollision).
Die Mondoberfläche in der Landezone des Chang'e-4-Landemoduls ist voller Falten, zahlreicher Kieselsteine und kleiner Krater. Nach jeder seiner kleinen Bewegungen sollte der Yutu-2-Rover anhalten, ein Bild der Oberfläche machen und diese Daten per Satellit zur Erde zurücksenden. Repeater.
Wissenschaftler, Betreiber des MCC und Ingenieure auf der Erde verarbeiten diese Daten und legen eine weitere Route fest, auf der der Yutu-2-Rover folgen wird.
Yutu-2-Roverantennen müssen so konfiguriert sein, dass sie auf einen Repeater-Satelliten zeigen, um Steuersignale korrekt zu senden und zu empfangen, während die Solarmodule des Rovers optimal gekippt werden sollten, um eine große Menge Sonnenlicht zu empfangen und die Leistung zu maximieren Strom zum Zeitpunkt der Datenübertragung.
 Sechsradrover "Yutu-2":
Sechsradrover "Yutu-2":- Das Gesamtgewicht des Rovers beträgt ca. 140 kg.
- Tragfähigkeit von ca. 20 kg;
- kann sich an Hängen bewegen und verfügt über automatische Sensoren, um Kollisionen mit anderen Objekten zu verhindern;
- Der Rover wird über zwei Sonnenkollektoren mit Strom versorgt, sodass der Rover an einem Mondtag arbeiten kann.
- Höchstgeschwindigkeit von 200 Metern pro Stunde (diese Geschwindigkeit auf dem Mond kann immer noch nicht erreicht werden - da die Elemente auf der Oberfläche es nicht erlauben, den Rover früher zu beschleunigen und zu beschädigen);
- Die maximale Forschungsfläche beträgt 3 Quadratmeter. km;
- Geschätzte Arbeitszeit - 3 Monate (2160 Stunden);
- maximale geschätzte Entfernung - 10 km.
Die Radelemente des Yutu-2-Rovers sind in der Tat seine komplexen Konstruktionsmerkmale, die in der Konstruktionsphase von den Ingenieuren der Chinesischen Akademie für Weltraumtechnologie weiterentwickelt werden mussten. Sie weigerten sich, die Tracks zu verwenden, weil sie sich in Tests als weniger wartbar und anfällig herausstellten.
Wenn beispielsweise ein kleiner Stein in den Schienenmechanismus gelangt, kann der Rover stecken bleiben und den Überblick verlieren. Im Gegensatz zur fahrbaren Implementierung, die zuverlässiger ist und über eine erhöhte Ressource verfügt, kann sie auch Steine mit einer Höhe von bis zu 20 Zentimetern sicher bewegen.

Wenn der Yutu-2-Rover jedoch überrollt, kann er nicht mehr in seine Arbeitsposition zurückkehren. Die Sonnenkollektoren an den Seiten des Mondrovers sind sehr zerbrechlich, sie können nach dem Sturz reißen oder staubig werden, wodurch sie unbrauchbar werden.

Daher ist es bei der Fernsteuerung von Rovers erforderlich, sich darauf zu konzentrieren, die Position des Yutu-2-Rovers so stabil wie möglich zu halten und ihn nicht fallen zu lassen, wenn er sich entlang der Oberfläche bewegt.
Aber wie können all diese Kameras des Chang'e-4-Landemoduls und des Yutu-2-Rovers gesteuert werden, Daten senden und Strom empfangen?Über Bordsteuerungen und das Stromversorgungssystem des Landemoduls und des Rovers.Das Landemodul Chang'e-4 und der Rover Yutu-2 verfügen über spezielle Nutzlaststeuerungen, mit denen wissenschaftliche Daten von verschiedenen Modulen und Elementen von Geräten empfangen, gespeichert und gesteuert werden.
Ferner werden Steuersignaldaten, wissenschaftliche Daten und Fotodaten unter Verwendung der Schnittstellen RS-422 (Telemetrie und Steuerung) und LVDS (wissenschaftliche Daten) an die zentralen Steuerungen des Landemoduls und des Rovers übertragen, die sie über das Kommunikationssystem unter Verwendung eines Satelliten an das MCC auf der Erde übertragen Repeater "Tseyuqiao".
Die Nutzlaststeuerungen des Chang'e-4-Landemoduls und des Yutu-2-Rovers sind mit einem Zentralprozessor und FPGA-Arrays ausgestattet.
Mit Hilfe der Nutzlastreglerelemente wird auch die Bordspannung + 28V in die Spannung für Sekundärstromversorgungen + 5V, + -15V, + 3,3V sowie die ständige Überwachung der Spannungs- und Temperaturwerte der Reglermodule und externer Geräte umgewandelt.
Als Mikroprozessor wird Folgendes verwendet: ATMEL AT697F (Rad-Hard 32-Bit-SPARC V8-Prozessor).
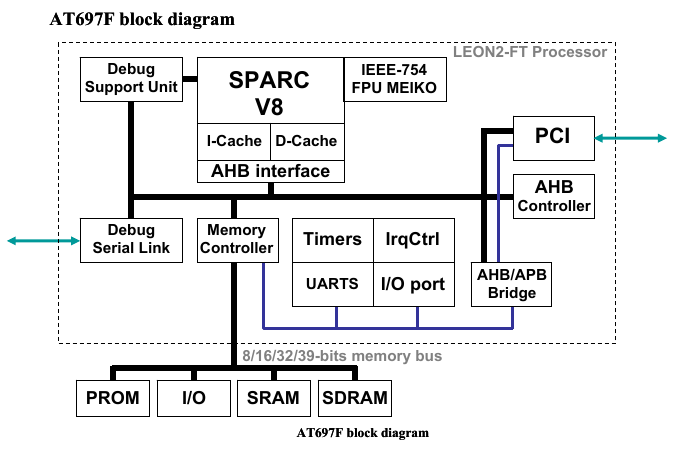
Als programmierbare Logik werden integrierte Schaltkreise (FPGA / FPGA) verwendet: ein Array von sechs XILINX XQR2V3000-4CCG717 (strahlungsgehärtetes QPro Virtex-II-FPGA).
Zum zusätzlichen Schutz der Mikroschaltung vor Strahlung werden Aluminiumschirme mit einer Dicke von mindestens 3,8 mm verwendet.
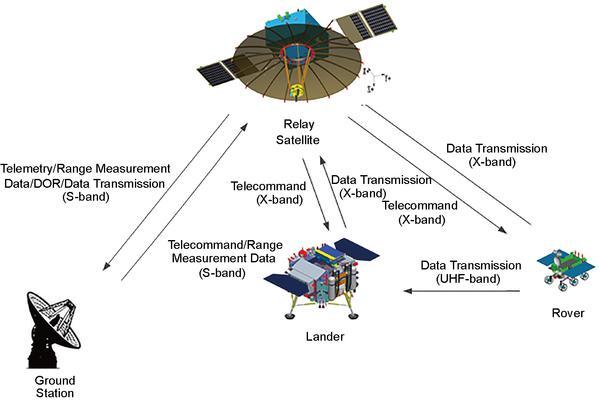
Kommunikations- und Datenübertragungsschemata von Geräten auf dem Landemodul Chang'e-4: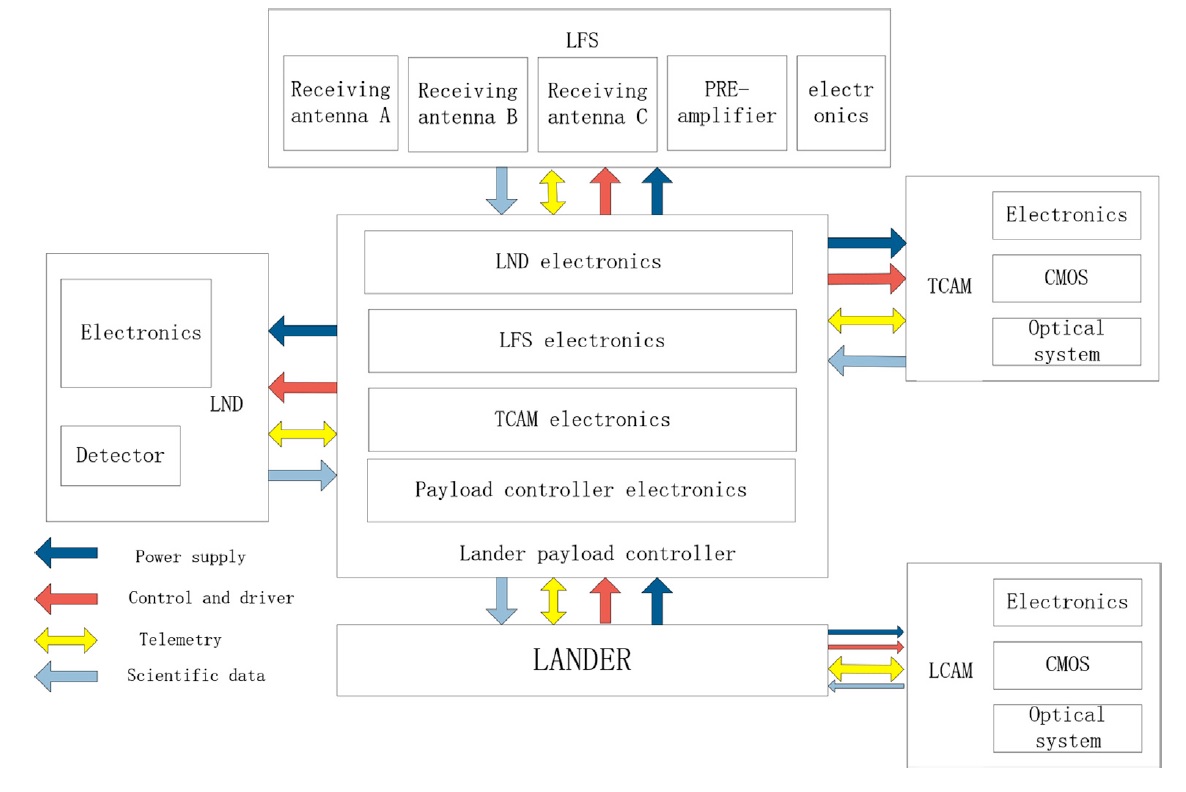
wo:
- LFS - Niederfrequenzspektrometer;
- LND - Lunar Lander Neutronen und Dosimetrie;
- TCAM - Geländekamera;
- LCAM - Landekamera.
Kommunikations- und Datenübertragungsschemata von Geräten auf dem Yutu-2-Rover: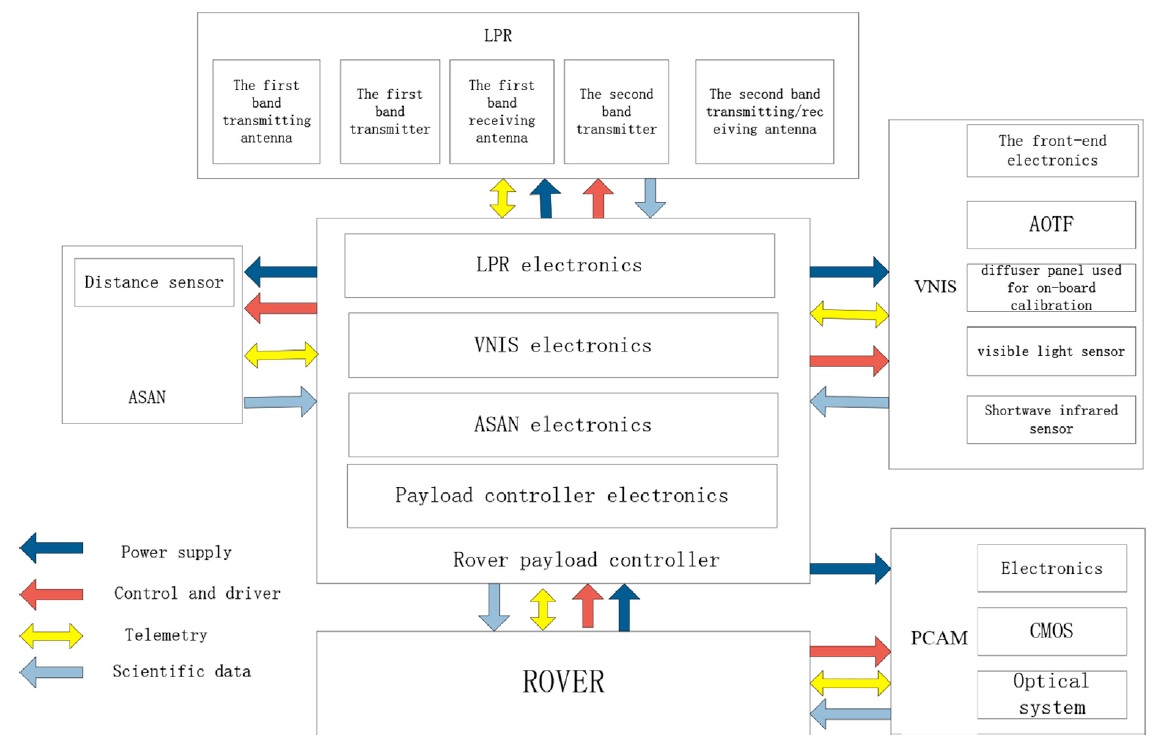
wo:
- LPR - Lunar Penetrating Radar;
- ASAN - Advanced Small Analyzer für Neutralleiter;
- VNIS - Sichtbares und Nahinfrarot-Bildgebungsspektrometer;
- PCAM - Panoramakamera.
Übrigens, früher in Veröffentlichungen habe ich bereits über fast alle wissenschaftlichen Geräte des
Abstiegsmoduls und des
Rovers gesprochen , nur ein wissenschaftliches Gerät blieb inkognito - LPR (Lunar Penetrating Radar) - das von außen gesehen werden kann, wie zwei "Antennen" hinter dem Rover.
Ich werde versuchen, über dieses interessante Gerät eine separate Publikation zu schreiben.