
In der Welt der Robotik hat sich seit langem und erfolgreich ein Software-Framework entwickelt, mit dem Sie schnell Prototypen von Robotersystemen erstellen können - Robot Operating System (ROS). Wir vom Sberbank Robotics Laboratory nutzen es aktiv bei der Entwicklung eigener Projekte. Nachdem wir einige Erfahrungen gesammelt und festgestellt hatten, dass es in Russland noch kein einziges praktisches Treffen zu ROS gegeben hat, beschlossen wir, es zu organisieren und Wissen auszutauschen und gleichzeitig die Robotik-Community kennenzulernen. Das ROS Russian Meetup 2019 findet am 16. April im Rahmen des Skolkovo Robotics 2019-Forums in Skolkovo statt. Dies ist eine Gelegenheit für ROS-Entwickler und Robotiker aller Ebenen, sich eines Tages einem Live-Erfahrungsaustausch und der Kommunikation mit der Community zu widmen. Wenn Sie mit ROS vertraut sind, können Sie sicher zum
Registrierungsformular gehen. Dort werden auch die Programm- und Organisationsinformationen abgelegt. Während des Treffens werden wir die Geschichte von ROS und die Prinzipien der Community diskutieren, wir werden viel Zeit für praktische Berichte über SLAM und Indoor-Laser-Lidar-Navigation sowie einen Roboterpfadplaner verwenden. Wir zeigen, wie man Industriemanipulatoren über ROS steuert, wie man Sensordaten verwendet und wie man mit der SMACH-Zustandsmaschine arbeitet. Wir erklären Ihnen sogar, wie Sie ROS problemlos installieren und mit der Entwicklung eines Roboters beginnen können.
Die Teilnahme an dem Meeting ist übrigens kostenlos, aber da die Anzahl der Sitzplätze begrenzt ist, bitten wir Sie, auf die Bestätigung zu warten. Und für diejenigen, die mit ROS nicht vertraut sind, bieten wir einen kleinen Überblick.
 Zweidimensionale Sicht auf die Welt mit den Augen von ROS
Zweidimensionale Sicht auf die Welt mit den Augen von ROSRobot Operating System ist ein Software-Framework für Roboter, das die grundlegenden Algorithmen zum Erstellen komplexer Roboter implementiert. Es enthält eine Reihe von Tools, Bibliotheken und Standards, die die Erstellung komplexer und zuverlässiger Roboterverhalten auf einer Vielzahl von Roboterplattformen vereinfachen sollen.
Die Hauptideologie des Projekts sind die Prinzipien von Open Source, Dokumentation von Paketen, Wiederverwendung von Code und der globalen Gemeinschaft der Robotik.
Warum wurde es geschaffen
Es ist schwierig, wirklich zuverlässige, universelle Robotersoftware zu erstellen. Aus Sicht des Roboters führen Probleme, die für die Person trivial erscheinen, zu der hohen Komplexität des Entwicklers, der das Robotersystem programmiert. Es ist so schwierig, mit diesen Aufgaben zu arbeiten, dass es manchmal nicht möglich ist, sie alleine oder in einem kleinen Team zu lösen.
Infolgedessen wurde ROS von Grund auf neu entwickelt, um die kollaborative Softwareentwicklung für die Robotik zu fördern. Beispielsweise kann ein Labor SLAM-Experten für Innenräume haben und ein SLAM-System von Weltklasse anbieten. Eine andere Gruppe könnte Experten für die Verwendung von SLAM für die Navigation haben, und eine andere Gruppe könnte einen Computer-Vision-Ansatz entwickeln, der sich gut zum Erkennen kleiner Objekte in einer unordentlichen Umgebung eignet. ROS wurde speziell für solche Gruppen entwickelt, um zusammenzuarbeiten und auf der Arbeit des anderen aufzubauen.
Kurzer Hintergrund
ROS ist ein großes Projekt mit einer Geschichte und einer großen Anzahl von Teilnehmern. Die Notwendigkeit eines offenen Kollaborationssystems wurde von vielen Menschen in der Robotik-Forschungsgemeinschaft benötigt, und viele Projekte wurden zu diesem Zweck erstellt.
Mitte der 2000er Jahre unternahm die Stanford University verschiedene Anstrengungen im Zusammenhang mit der Verwendung von KI in der Robotik, beispielsweise das STanford AI Robot (STAIR) -Programm und das Personal Robots (PR) -Programm zur Erstellung kundenspezifischer Prototypen dynamischer Softwaresysteme für den Einsatz in der Robotik . 2007 stellte Willow Garage erhebliche Ressourcen zur Verfügung, um diese Konzepte weiter auszubauen und Prototypen zu erstellen. Die Bemühungen wurden von unzähligen Forschern unterstützt, die ihre Zeit und Erfahrung teilten, um sowohl zu den Grundideen von ROS als auch zu den wichtigsten Softwarepaketen beizutragen. Die gesamte Software wurde unter Verwendung der Open-Source-Lizenz BSD entwickelt und entwickelte sich allmählich zu einer weit verbreiteten Plattform in der Gemeinschaft der Robotikforscher.
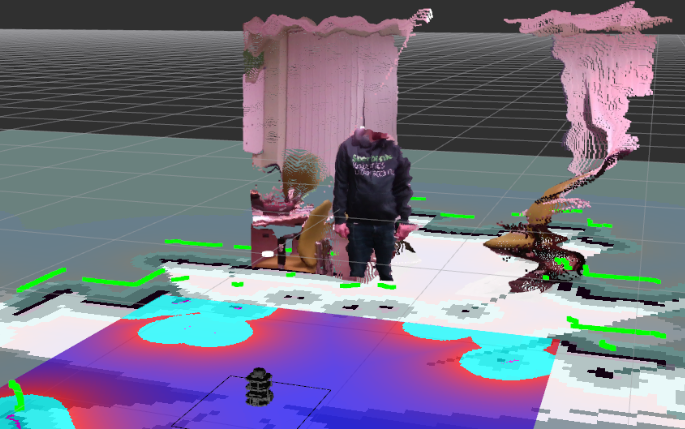 Dreidimensionales Weltbild mit den Augen von ROS
Dreidimensionales Weltbild mit den Augen von ROS
Globale ROS-Community
Von Anfang an wurde ROS in mehreren Institutionen und für mehrere Roboter entwickelt, darunter viele Institutionen, die PR2-Roboter von Willow Garage erhalten haben. Obwohl es für alle Teilnehmer viel einfacher wäre, ihren Code auf denselben Servern zu hosten, hat sich das „Verbundmodell“ im Laufe der Zeit zu einer der Stärken des ROS-Ökosystems entwickelt. Jede Gruppe kann ihr eigenes ROS-Code-Repository auf ihren eigenen Servern ausführen, und sie besitzen es vollständig und steuern es. Sie brauchen keine Erlaubnis. Wenn sie beschließen, ihr Repository öffentlich zugänglich zu machen, können sie die Anerkennung der Community erhalten, die sie für ihre Leistungen verdienen, und wie alle Open-Source-Projekte von Testern und Verbesserungsvorschlägen profitieren.
In den letzten Jahren ist ROS gewachsen und umfasst nun eine große Benutzergemeinschaft auf der ganzen Welt. In der Vergangenheit waren die meisten Benutzer in Forschungslabors, aber sie treten zunehmend im kommerziellen Bereich auf, insbesondere in der Industrie- und Servicerobotik.
Die ROS-Community ist sehr aktiv und hat mehr als 3.000 Mitglieder auf der diskurs.ros.org-Liste, über 8.000 Benutzer im gemeinsamen Dokumentations-Wiki und etwa 22.500 Benutzer auf der Website, um Antworten auf ROS-Fragen zu erhalten. Wikipedia enthält mehr als 22.000 Seiten und das Bearbeitungstempo beträgt etwa 30 pro Tag.
Derzeit liegt die Anzahl der russischsprachigen ROS-Benutzer laut ROS Metrics Report 2018 unter anderen Ländern auf dem 15. Platz. Treffen, diskutieren und beheben wir sie. Sie können sich auch über die ROS-Funktionen für Ihre Projekte und die tatsächliche Praxis der Entwicklung von Robotern informieren.
Um als Zuhörer teilzunehmen, füllen Sie das
Formular aus .
Und wenn Sie eine interessante Nachricht für die Community haben, können
Sie trotzdem
Redner werden .
Programm: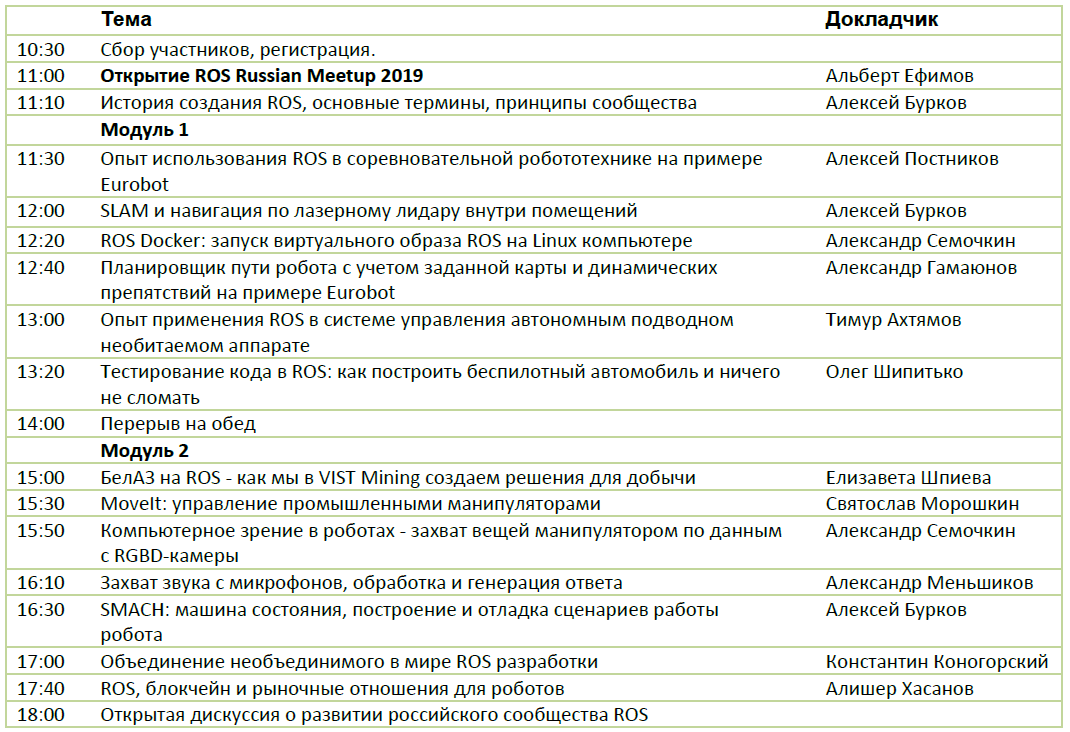
Die Veranstaltung wird vom Sberbank Robotics Laboratory organisiert.