Im
ersten Teil haben wir den Prozess der Entwicklung einer Testversion eines Unterwasser-Entfernungsmesser-Moduls beschrieben. Es ist an der Zeit, Informationen über die zweite Version des Moduls auszutauschen, da wir die vorgeschlagenen Änderungen im ersten Artikel implementiert haben.
Änderung Nr. 1: Temporäre automatische Verstärkungsregelung (GAM).Beim Testen der ersten Version des Moduls wurde das Problem des Abrollens des reflektierten Signals von Hindernissen in der Nähe des Emitters klar umrissen. Einige Kommentatoren eines früheren Beitrags haben eine VARU empfohlen. Ja, die Verwendung von VARU war sehr angemessen. In den ersten Augenblicken nach dem Senden eines Sondenimpulses ist es nun möglich, die Verstärkung zu minimieren und im Laufe der Zeit zu erhöhen.
Die Implementierung der VARU ist in Schema Nr. 1 dargestellt.
Der DAC des Mikrocontrollers erzeugt eine Spannung, die an das Gate des Transistors Q4 angelegt wird.
Für den angelegten Transistor wird die Charakteristik der eingeführten Dämpfung experimentell in Abhängigkeit von der Spannung am Gate erhalten. Basierend auf dieser Eigenschaft und den vom Benutzer angegebenen Umgebungsparametern wird eine Wertetabelle berechnet, die über DMA an den DAC des Mikrocontrollers gesendet wird.
Tatsächlich schließt der im linearen Modus arbeitende Transistor das Nutzsignal vom Ausgang der ersten Stufe des Verstärkers teilweise gegen Masse, wodurch die Amplitude des Signals reguliert wird, das zu nachfolgenden Stufen des Verstärkers geht.
 Änderung Nr. 2: Aufwärtswandler zur Stromversorgung der Ausgangsstufe.
Änderung Nr. 2: Aufwärtswandler zur Stromversorgung der Ausgangsstufe.Schema Nummer 2. Hier ist alles einfach. Mit dem Aufwärtswandler können wir unseren Emitter etwas „lauter“ machen. Sie können die Versorgungsspannung der Ausgangsstufe von 5 bis 16 Volt einstellen. Nützliche Sache für Fernmessungen.
Änderung Nr. 3: MEMS-Gyroskop / Beschleunigungsmesser.Schema Nummer 3. Eingebauter ICM20602-Chip. Auf diese Weise können nicht nur Informationen über die Reflexionsgrade von Objekten auf dem Strahlengang erhalten werden, sondern auch die Richtung (Winkel), in die das Modul in diesem Moment schaut. Nachdem Sie den einfachsten Scan des Moduls durchgeführt haben (sogar das Modul mit der Hand gedreht haben), können Sie nach dem Prinzip der Lidar-Bilderzeugung ein realistisches Bild des Scanobjekts erhalten.
Die Änderungen sollten auch die Verwendung eines billigeren, aber nicht schlechteren Verstärkers MCP669-E / ML beinhalten. Gate-Treiber wählten auch den billigsten der verfügbaren TPS51604DSGR.
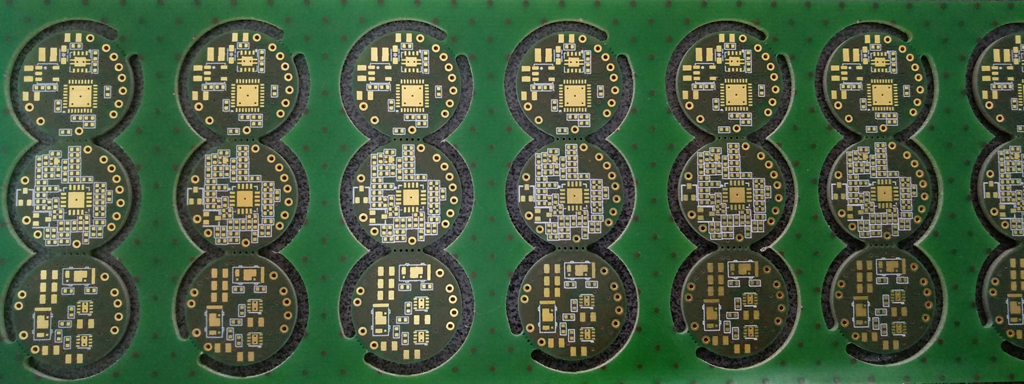
Die Form der Leiterplatten ist rund, um eine rationellere Platzierung im Metallgehäuse zu ermöglichen.
Für die Kompaktheit und Konstanz der Eigenschaften von Kopie zu Kopie wird der Transformator nach planarer Technologie hergestellt.
Eisen ist fertig. Was weiter? Die schönste Stunde der Programmierer kommt!
Obwohl die grundlegenden Funktionen auf niedriger Ebene bereits in der Arbeit getestet wurden (Treiberverwaltung, Arbeiten mit ADCs, DACs usw.), müssen Sie dennoch eine bequeme Interaktion mit dem Host implementieren, die API erstellen und detailliert beschreiben, die den Zugriff auf alle Funktionen des Moduls ermöglicht. Ich möchte Sie daran erinnern, dass wir für diese Zwecke UART als physische Schnittstelle ausgewählt haben. Und hier ist zu erwähnen, dass es im Team Meinungsverschiedenheiten darüber gab, auf welche Art von Protokoll es sich zu konzentrieren lohnt: Text oder Binär. Einerseits ist das Binärprotokoll Geschwindigkeit und einfache Verarbeitung auf der Hostseite. Andererseits erleichtert das Textprotokoll die Analyse des Datenaustauschs (auch im Hyperterminal) und die Verwendung aussagekräftiger Befehle / Modulantworten. Hier ist ein kleines Beispiel für die Interaktion mit dem Modul mithilfe von Textbefehlen im Putty-Terminal:
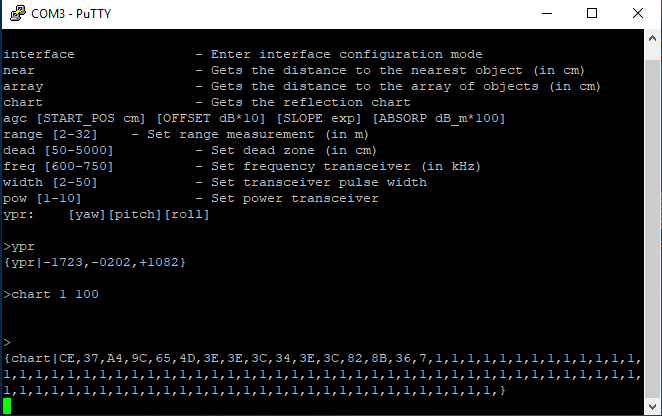
Durch Drücken der TAB-Taste wird eine Liste aller Befehle angezeigt.
Es wird ein Beispiel für die Verwendung des Befehls YPR gegeben, der den aktuellen Wert der Modulrichtung entlang drei Achsen (Euler-Winkel) zurückgibt.
Der Befehl CHART gibt den Wert des reflektierten Signals von Objekten im Pfad des Sondenimpulses zurück. Sie können die Auflösung der Messung (bisher in Zentimetern) und die Anzahl der Messungen einstellen.
Der ideale Fall ist natürlich die Unterstützung beider Versionen des Protokolls, sowohl in Textform als auch in Binärform. Leider sind wir zeitlich begrenzt und möchten die Bemühungen sofort auf eine für die Benutzer akzeptablere Option ausrichten. Daher eine bescheidene Bitte: Markieren Sie in der Abstimmungsoption, was für Sie bequemer wäre.
Im nächsten Artikel werden wir versuchen, die gesamte Funktionalität des Moduls zu nutzen, um Unterwasserobjekte scannen und ein Bild mit den Umrissen dieser Objekte erhalten zu können.
PSDie Meinungen zum Inhalt des zweiten Artikels innerhalb des Teams waren geteilt: trocken, ein wenig, aber jetzt, entweder groß, schön, aber dann ... "Jetzt" hat gewonnen.
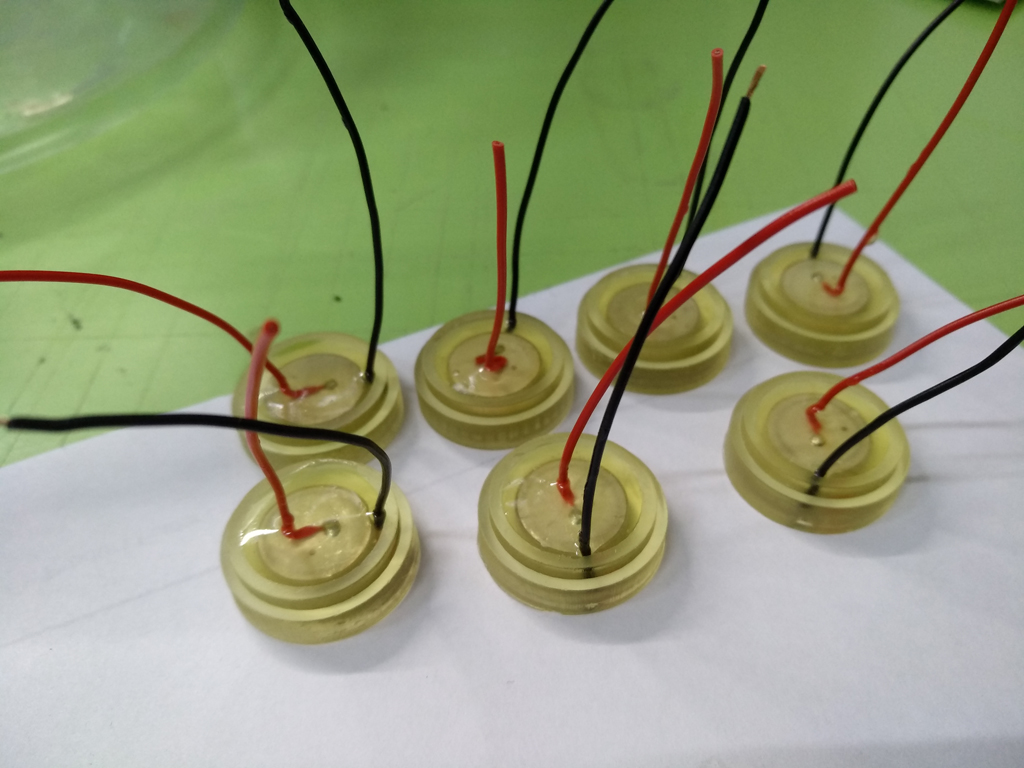
Ich werde die Trockenheit des Textes mit ein paar Fotos verdünnen, die während des Herstellungsprozesses der zweiten Version des Moduls aufgenommen wurden.
Emitter-Baugruppe
Bearbeitete Metallgehäuse

Laserbeschriftete Gehäuse

Montage von Modulplatinen
