Hallo allerseits! Die Entwicklung des Hexapods steht kurz vor dem Abschluss der ersten Kampfversion, und jetzt ist es an der Zeit, die gesamte elektronische Füllung zu beschreiben. Ich habe auch HC-SR04 hinzugefügt, um die Hindernisse zu erkennen, die für die visuelle Zufriedenheit beim Erscheinungsbild des Hexapods so fehlten. Es wird ein kleines neues Video geben und Sie haben die Möglichkeit, mich elektronisch zu treten.
Entwicklungsstadien:Teil 1 - DesignTeil 2 - MontageTeil 3 - KinematikTeil 4 - mathematische Trajektorien und SequenzenTeil 5 - ElektronikTeil 6 - Übergang zum 3D-DruckTeil 7 - Neues Gehäuse, Anwendungssoftware und KommunikationsprotokolleAnsicht mit installiertem HC-SR04 Ursprünglich war das Gehäuse für separate Stromversorgungs- und Steuerplatinen konzipiert, sodass sich eine in der Mitte des Gehäuses näher an der Batterie befindet und die zweite zur Erleichterung des Debuggens aufgerufen wird. Und so fangen wir an.
Steuereinheit
Die Steuereinheit ist das „Gehirn“ des Hexapods, der auf dem SAM3X8E-Controller basiert und aus zwei Karten besteht: einer Karte mit einer Steuerung und einer Verteilertafel. Die Platine mit dem Controller ist bereits verwendet (siehe Abbildung unten), die Verteilertafel muss jedoch hergestellt werden. Vielleicht werde ich in Zukunft eine Platine in der Fabrik bestellen, in der der Controller das Sandwich entfernen kann.
Der Hauptzweck des Verteilers besteht darin, die "leichten" Peripheriegeräte, den Controller, mit Strom zu versorgen und die Signale auf seine Pins zu verteilen. Ich habe eine Liste meiner Anforderungen für dieses Board zusammengestellt:
- Möglichkeit zur Installation auf der Karte HLK-RM04 (UART-WIFI-Konverter);
- Möglichkeit zum Anschließen des I2C-Displays;
- Fähigkeit, HC-SR04 anzuschließen;
- Fähigkeit zur Messung der Batteriespannung = Versorgungsspannung der Platine;
- Fähigkeit zur Messung der peripheren Versorgungsspannung und des HLK-RM04;
- Schließen Sie den Hochtöner an, um die Batterieentladung anzuzeigen.
- LED-Anzeige des Systemzustands: etwas Wichtiges ist abgefallen (die Konfiguration ist falsch oder etwas anderes), etwas Unwichtiges ist abgefallen (Anzeige zum Beispiel), alles ist in Ordnung;
Nachdem ich mich ein wenig für die elementare Basis entschieden und die Möglichkeiten meines Notgroschen mit losem Pulver erkannt hatte, begann ich sofort, die Platine zu verdrahten, ohne ihren Schaltplan zu erstellen. Es hat das erste Mal funktioniert und ich habe keine Pfosten in der Arbeit gefunden. Die Verkabelung ist wie folgt:
Er hat die Schienen speziell breit gemacht, damit es keine Probleme im Herstellungsprozess gab. Ich habe beschlossen, ein Board mit LUT zu machen, es hat sich mit nur 2 Mal als gut herausgestellt. Unter dem Spoiler des Fotos, um die erfolglosen und erfolgreichen Optionen zu vergleichen (links erfolglos, rechts erfolgreich).
Nun, dann entspricht alles den Anweisungen - wir betrügen das Brett, bohren Löcher und werfen Komponenten. Das Ergebnis ließ nicht lange auf sich warten:
HLK-RM04 wird in der Mitte eingesetzt, eine Schleife zur Stromversorgungsplatine wird rechts in den Kamm eingesetzt, Strom wird links zugeführt. Die Spannung auf der Platine wird mit einem einfachen Spannungsteiler gemessen. Während des Langzeitbetriebs (30–40 Minuten) erwärmt sich der Spannungsregler für HLK-RM04 erheblich und ich habe gerade einen Kühler eingebaut.
Power Board
Der Gesamtstromverbrauch (Spitzenwert) der Laufwerke beträgt ungefähr 30 A (durchschnittlich ~ 1,3 A pro Laufwerk) unter schwerer Last, wenn 10-13 A in Ruhe gelaufen werden - 5-6 A. Die Messungen wurden empirisch mit einem Multimeter durchgeführt.
Ich entschied mich, die Leistung für jeden Antrieb basierend auf linearen Spannungsreglern, d. H. 18 lineare Spannungsregler - einer für jeden Antrieb. Als Linearregler werden LM317D2T-TR verwendet, die für die Ausgabe von 5 V konfiguriert sind. Es gibt mehrere Gründe für die Verwendung von 18 linearen Spannungsreglern und die prinzipielle Verwendung von Reglern:
- Sie können die Laufwerke nicht direkt an die Batterie anschließen, für sie beträgt die maximal zulässige Versorgungsspannung 6V;
- Relative Unabhängigkeit der Drehzahl von Antrieben von der Eingangsspannung;
- Linearregler sind gestapelt. Ich habe ihnen einmal ein 70er-Paket für Ali gekauft (der Artikel hat den größten Beitrag zur Lösung geleistet).
- Ich habe keinen linearen Spannungsregler für einen solchen Strom gefunden;
- Ich habe keinen kompakten und leichten DC-DC-Schaltkreis für einen solchen Strom gefunden.
- Die Möglichkeit, die Regler parallel zu schalten, ist eher zweifelhaft.
- Die Option „Linearregler + Verstärkungstransistor“ entzieht dem Stromkreis alle Schutzfunktionen, die der Linearregler bietet (zumindest schreiben die Leute das, und in diesem Fall stimme ich ihnen zu).
- Ich bin ziemlich schlecht darin, Schaltnetzteile zu entwerfen.
Die Platine ist sehr einfach und ich habe nicht begonnen, einen Schaltplan dafür zu zeichnen, und der Wunsch, das Ergebnis schnell zu sehen, machte sich auch bemerkbar. Die Verkabelung ist wie folgt:
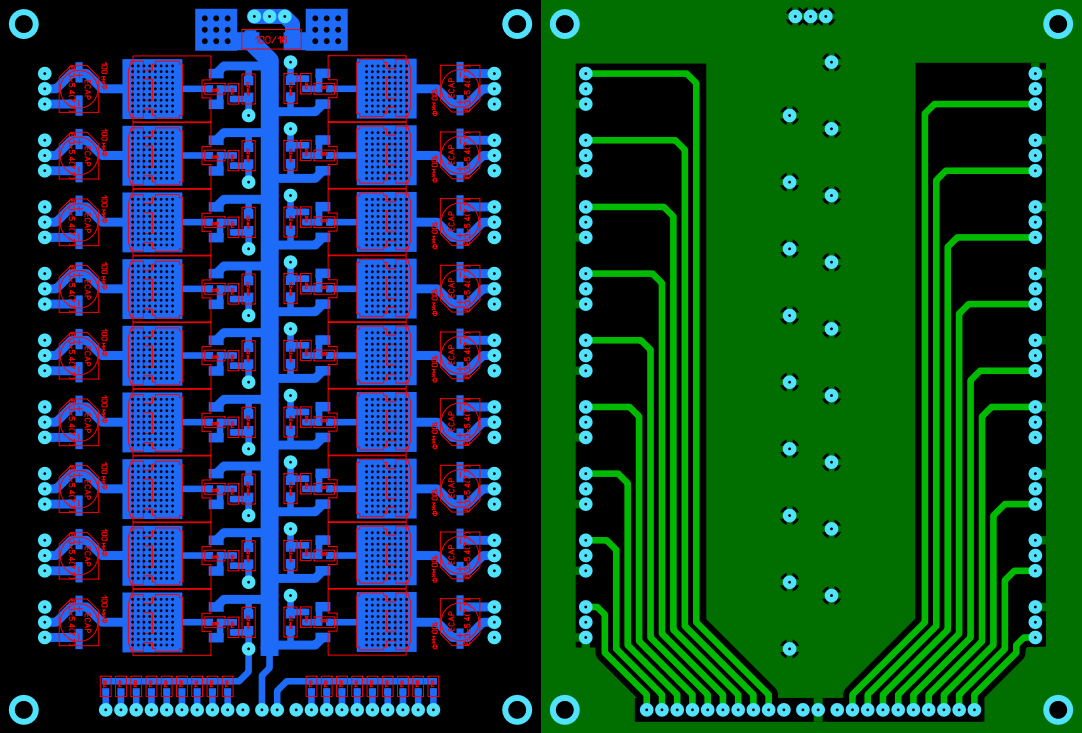
Oben befinden sich Kontaktflächen zum Löten von Drähten für die Batterie, von unten ein Kamm für ein Kabel und die Stromversorgung der Steuereinheit, und die Antriebe sind an den Seiten angeschlossen. Anfangs wollte ich es auch ermöglichen, die von jedem Servoantrieb verbrauchte Strommenge und die Temperatur der Platine zu messen, entschied mich jedoch, dies noch nicht zu komplizieren.
Das Board war einfach und zuverlässig, es gibt nichts zu brechen. Durchgeführte Lasttests bei einer Eingangsspannung von 11,1 V (3S LiPo) und 7,4 V (2S LiPo). Bei einer Eingangsspannung von 11,1 V waren die Regler erwartungsgemäß zu heiß und der Temperaturschutz wurde beim Gehen ausgelöst (der Kühler sparte nicht und die SMD-Regler auch), was mich zwang, die Eingangsspannung zu senken. Bei einer Spannung von 7,4 V sind die Regler warm und bei längerem Gehen funktioniert der Schutz nicht mehr - genau das brauchen Sie.
Das Board machte auch LUT und es stellte sich beim ersten Mal ziemlich gut heraus. Leider gibt es nur ein Foto der experimentellen Version des Boards, und ich wollte ungefähr 4 Stunden lang nicht wirklich ein neues herausnehmen und es aus Gründen der Fotografie nicht zerlegen (ich muss ungefähr 70% des Gehäuses zerlegen). Der Unterschied zwischen dem Alten und dem Neuen besteht nur darin, dass keine Löcher in der Mittellinie des Bretts vorhanden sind (es wurden lustige Experimente durchgeführt).
Ein Video
Leistungstests HC-SR04
Die Haltung meiner Katze gegenüber Hexapod
Der erste Straßenweg