Ein Affe (Schimpanse) entfernt mit einem Stock Termiten aus einer Termite. Auf dem zweiten Foto sammelt der Gorilla mit einem Stock das Gras, das er benötigt.
Ein Affe (Schimpanse) entfernt mit einem Stock Termiten aus einer Termite. Auf dem zweiten Foto sammelt der Gorilla mit einem Stock das Gras, das er benötigt.Entwickler aus den USA
haben einen speziellen Algorithmus für Roboter entwickelt , der es letzteren ermöglichte, zusätzliche Tools zur Ausführung der Aufgabe zu verwenden. Und es ist relativ einfach - auf eine bestimmte Weise ein Objekt von Punkt A nach Punkt B zu bewegen.
Der Algorithmus besteht aus zwei Teilen. Die erste ermöglicht es dem Roboter, Objekte zufällig zu bewegen und eine Art Experiment durchzuführen. Der zweite Teil ermöglicht es, die Konsequenzen einer bestimmten Aktion mithilfe eines neuronalen Netzwerks zu bewerten. Wie sich herausstellte, verwendeten die Roboter, die nach dem Algorithmus arbeiteten, Hilfsmittel ohne Schulung.



Eine Person verwendet jeden Tag viele zusätzliche Werkzeuge. Auch Tiere sind dazu in der Lage - Papageien, Krähen, Affen und einige andere Lebewesen können Stöcke, Kieselsteine und Dornen verwenden, um ihre gewünschten Aufgaben zu erfüllen (z. B. eine Käferlarve unter der Rinde hervorziehen).
Für uns ist die Verwendung eines Messers zum Schneiden von Brot ziemlich offensichtlich. Aber für einen Roboter, der jede Aktion in Form einer Maschinensprache erklären muss - überhaupt nicht.
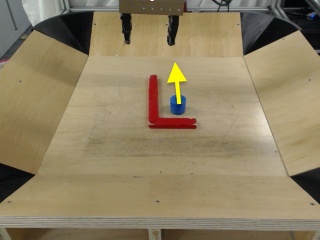
Wissenschaftler der University of California in Berkeley haben eine Möglichkeit entwickelt, Roboter darin zu schulen, Hilfswerkzeuge zu verwenden und Entscheidungen über ihre Anwendung in einer bestimmten Situation zu treffen. Der Algorithmus „visualisiert“ die Aufgabe und zeigt dem Roboter, in welche Richtung das Beispiel bewegt werden soll. Und schon nimmt der Roboter (dies ist ein gewöhnlicher Robotermanipulator) ein Instrument und bewegt ein Objekt. Alle Bewegungen werden vor der Kamera verfolgt.

Der Algorithmus basiert auf einem neuronalen Netzwerk. Ein spezielles Programm berechnet verschiedene Abfolgen von Aktionen für einen Roboter, die einem neuronalen Netzwerk "zugeführt" werden. Dadurch wird ein Video generiert, das zeigt, was als Ergebnis der Ausführung einer bestimmten Aktion passieren wird.
Der Manipulator erhält einen Befehl zum Ausführen einer Aktion. Wenn das tatsächliche Ergebnis mit dem geplanten übereinstimmt, wird die Aufgabe gezählt. Im Laufe der Arbeit werden verschiedene Videooptionen mit dem vom Benutzer bereitgestellten Bild verglichen und das Endergebnis der Aufgabe angezeigt. Nachdem die optimale Abfolge von Aktionen gefunden wurde, fährt der Roboter mit der Lösung des Problems fort.


Dieses Projekt kombiniert maschinelle Lernansätze wie
nicht demonstratives Lernen und Simulationstraining . Im ersten Fall wählt der Roboter die Optionen zufällig aus. Als Ergebnis wird eine signifikante Stichprobe von Daten generiert, die dazu beiträgt, ein optimales Ergebnis zu erzielen. Im zweiten Fall zeigten die Entwickler dem Roboter deutlich, wie man das Tool in dem einen oder anderen Fall einsetzt. In dieser Situation wird die Referenzlösung auf der Kamera aufgezeichnet, mit der der Roboter die Folgen seiner Aktionen vergleicht.
In einigen Fällen "versteht" der Roboter, dass es am besten ist, die Aufgabe ohne Hilfselemente zu erledigen - und tut dies auch. Werkzeuge werden ohne Schulung verwendet, auch wenn der Roboter zuvor nicht gezeigt wurde.