Hallo lieber habratchitel!Nicht einmal vier Jahre sind vergangen, seit das erste funktionierende Modell unseres Unterwasser-
GPS das Licht erblickte. Seitdem haben wir
ein Pfund Salz gegessen und einen ganzen Haufen verschiedener Systeme und Geräte hergestellt, aber nach dem Willen des Schicksals hat ein wichtiger Test unseren Erstgeborenen immer noch umgangen. In diesem Artikel werde ich Ihnen erzählen, wie es gelaufen ist.
Alle, die sich mit dem Thema Unterwasserroboter, ihrer Kontrolle und Navigation beschäftigen - willkommen bei der Katze auf unserem gefrorenen Kajak in den Aprilgewässern des Wolgograder Stausees!

(Akhtung! Es gibt viele Fotos unter dem Schnitt!)
"... der wahre Ort des Schiffes, obwohl es bekannt ist, aber es ist kein Zufall,
es ist, aber es ist nicht bekannt, zu welchem Zeitpunkt. "
Aleksishin V.G. und andere praktische Navigation, 2006. S. 71.
Worum geht es?
Für diejenigen, die absolut keine Zeit zum Lesen haben, werde ich das Problem kurz beschreiben:
GPS fängt nicht unter Wasser und die Funkkommunikation funktioniert nicht, fast die gesamte Navigation erfolgt über Akustik, und die Kommunikation erfolgt über Akustik, Kabel und manchmal in klarem Wasser unter Verwendung von
Licht .
Für die Neuankömmlinge werde ich traditionell Links zu unseren früheren Veröffentlichungen auf dem Hub bereitstellen, in denen wir alles über Unterwasserkommunikation und -navigation erzählen: von der Geschichte der Erstellung unseres Unterwasser-GPS und der Übertragung von „Video“ -Sound durch Wasser bis hin zu Anweisungen zur Herstellung einer einfachen hydroakustischen Antenne aus Müll:
-
Unterwasser-GPS von Grund auf neu pro Jahr-
Wir haben das kleinste Sonarmodem der Welt hergestellt-
Über die Wirkung von Cyanobakterien auf die Sprachfunktionen des Präsidenten-
Aus dem Müll eine einfache Sonarantenne machen-
Sitzung der Video-Tonübertragung durch Wasser mit Belichtung-
Unterwasser "GPS" auf zwei Transceivern-
Navigation unter Wasser: Peilung nicht Peilung - Sie sind zum Erfolg verurteilt-
Unterwasser-GPS: FortsetzungDrohnen, die fliegen und rollen, auf dem Boden kriechen und auf der Oberfläche schweben, übertragen Videos von ihren Kameras in Echtzeit und manchmal auch GPS-Koordinaten, und der Bediener weiß immer, wo sich sein Gerät befindet. Außerdem kann der Bediener es häufig sehen.
Bei Unterwasserfahrzeugen (TNPA oder ROV) ist alles etwas anders. Wenn Sie das Gerät in dunkles Wasser lassen, können Sie nur eines sicher sein - es befindet sich definitiv unter Wasser.
Ein bisschen tiefer in das Problem
Geräte werden in verschiedene Klassen eingeteilt, die nach Größe und Aufgabe unterteilt sind. Die einfachsten und kleinsten (wie unsere) Inspektionsgeräte sind nur eine Videokamera an einem Kabel mit Motoren. Komplexere und größere können mit Manipulatoren und anderen interessanten Anpassungen ausgestattet werden.
Einige Exemplare in Gazellengröße werden mit einem Spezialschiff,
Piraten und einer Bordmannschaft geliefert und haben eine Gesamtkapazität von mehr als 200 PS. Die Kabellängen können bei kleinen Geräten zwischen zehn und Hunderten von Metern liegen und bei großen Großgeräten Tausende von Metern erreichen.
TNLA wird nominell durch visuelles Feedback gesteuert - wenn man das von den Kameras der Kamera über Kabel übertragene Bild betrachtet, sind sie manchmal mit Sonar ausgestattet, da das Wasser manchmal
immer bewölkt ist.
Dieser Ansatz hat genau einen Nachteil: Wenn man auf dem Monitor ein Bild eines interessierenden Landschaftselements sieht, ist es absolut unmöglich, genau zu sagen, wo es sich befindet.
Unterwassernavigation
Sie haben mit diesem Nachteil zu kämpfen, wenn sie akustische Positionierungssysteme verwenden. In der Regel setzen sie einen Pinger (der regelmäßig ein spezielles Signal aussendet) oder ein Transponder-Beacon auf das Gerät. Das Pingersignal wird erfasst, die Entfernung wird bestimmt, und dann wird durch den Winkel (oder zwei Winkel - horizontal und vertikal) der Signalankunft und die Entfernung der Ort der Vorrichtung bestimmt. Solche Systeme heißen UKB (kurz für Ultrashort-Base). Sie beziehen sich auf den goniometrischen Entfernungsmesser und weisen eine ganze Liste von Nachteilen auf, insbesondere im Hinblick auf diese Aufgabe. Die einfachsten ausländischen
kosten ab
17.000 Euro , unsere sind
auch da , nicht schlechter und günstiger, aber immer noch nicht kostenlos.
Um die horizontalen (und in alten und vertikalen Systemen, in neuen Pinger überträgt seine Tiefe) Ankunftswinkel des Signals des Befragten oder Pingers zu bestimmen, wird eine Peilantenne benötigt. Das Gerät selbst ist nicht einfach und erfordert die Installation auf einer Stange, die auf einem Schiff montiert werden muss. Durch den Bereich, die Tiefe und den horizontalen Winkel (oder durch den Bereich und zwei Winkel) wird nur die relative Position der Vorrichtung bestimmt. In diesem Fall nimmt die Genauigkeit mit zunehmender Entfernung ab.
Die Genauigkeit der Winkelbestimmung hängt ab von:
- Die Eigenschaften der Antenne selbst betragen normalerweise etwa 0,5 bis 3 °. In den fortschrittlichsten Systemen erreicht sie 0,03 °, aber es lohnt sich, nur dämonisches Geld zu verdienen. Ich möchte Sie daran erinnern, dass 1 ° in einer Entfernung von 1000 Metern eine Ausbreitung von 17 Metern (d. H. ± 17 Metern) ergibt.
- wie gut die Position der Antenne selbst bestimmt ist (Rollen und Trimmen);
- von spezifischen hydrologischen Bedingungen. Zum Beispiel ist es möglich, kein direktes Signal, sondern eine Reflexion oder deren Summe zu erfassen, wodurch der Ankunftswinkel des reflektierten Signals bestimmt wird. Und er konnte von allem reflektieren - auch aus einer ganz anderen Richtung.
Nachdem die Entfernung und der Ankunftswinkel des Signals bestimmt wurden, müssen Sie all dies mit der Geografie verknüpfen. Das heißt, Sie müssen die geografische Position der Peilantenne und die Richtung ihrer Null relativ zur Richtung nach Norden kennen. Dann können Sie das
direkte geodätische Problem lösen und die Position des Unterwasserfahrzeugs in geografischen Koordinaten bestimmen. Das heißt, Sie müssen noch einen Kompass und GPS an der Antenne haben.
Generell bin ich davon überzeugt, dass UHF nur dort angewendet werden sollte, wo es völlig unmöglich ist, Long-Base-Systeme zu verwenden.
Ich betone - absolut. Zum Beispiel, wenn ein gezogenes Objekt positioniert ist und Sie eine sehr lange Strecke zurücklegen müssen. In diesem Fall müssen die Elemente einer langen Basis sehr oft bewegt werden, was zu viel Zeit und Mühe kostet. In einem anderen Beispiel ist es aufgrund der großen Tiefe unmöglich, Bojen mit einer langen Basis auf der Oberfläche zu installieren - sehr lange Seile und im Allgemeinen das Verankerungsschema sind erforderlich sehr kompliziert. In allen anderen Fällen beschwöre ich Sie: Verwenden Sie eine lange Basis - es ist einfacher, zuverlässiger und genauer.
UKB ist gut und unverzichtbar, wenn Sie etwas finden müssen, sich allmählich nähern und die Genauigkeit erhöhen müssen. Es mag scheinen, dass ich gegen UHF und für DB bin, aber ich fordere nur die Verwendung von Geräten gemäß dem beabsichtigten Zweck. Am Ende haben wir auch den KGB gemacht, und angesichts dessen ist es schwierig, mich der Voreingenommenheit zu beschuldigen.
Langstrecken-Systeme (DB-Systeme) - Dies ist der Fall, wenn mehrere Empfänger oder Sender mit großem Abstand vorhanden sind (z. B. ist GPS ein Langstrecken-System). Sie behalten ihre Genauigkeit innerhalb der Basis bei, sind viel weniger anfällig für Pitching und liefern im Allgemeinen viel bessere Ergebnisse, da sie sich entweder auf Entfernungsmesser- oder Differenz-Entfernungsmessersysteme beziehen.
Lange konnte ich die Frage nicht beantworten - warum versuchen alle, Nägel mit einer Schaufel zu hämmern? Aber im Laufe der Zeit kamen meine Kollegen und ich zu einem enttäuschenden Ergebnis: Erstens denken die Leute sehr einfach - eine Antenne und ein Pinger sind einfacher als mehrere Elemente einer langen Basis, die weit voneinander entfernt sind. Zweitens waren DB-Systeme bis vor kurzem nur durch die sogenannten vertreten Bodenbasis, deren Installation sehr viel Zeit und Geld erfordert.
Wir sind seit langem in einem Kreuzzug gegen den
Analphabetismus der Nutzer der etablierten Ordnung der Dinge. Dies begann, als wir das allererste Beispiel für unser Unterwasser-GPS machten, bei dem es sich um ein System mit langer Basis und einer Oberfläche anstelle einer Bodenbasis handelt.
GPS unter Wasser
Kehren wir zum Helden des heutigen Tests zurück. Das Navigationssystem wird durch die Navigationsbasis selbst dargestellt, die aus vier schwimmenden
Bojen-Repeatern des GNSS-Signals besteht:

Bojen werden vor Arbeitsbeginn mit Hilfe von Steinankern und Seilen auf einem Teich installiert. Alles, was getan werden muss, ist, die Boje vor Anker zu lösen, bevor Sie auf den Schalter klicken. Das ist wirklich alles was getan werden muss.
Ein weiteres Element des Systems ist ein Navigationsempfänger, der sich auf einem Unterwasserobjekt befindet:

Der
RedNODE- Navigationsempfänger (kleiner gelber Zylinder) ist an der Rückseite des Geräts angebracht. Es wird vom Bordnetz des Roboters gespeist und überträgt Daten über das Kabel des Geräts.
Da die Bojen nur emittieren und die Empfänger nur akzeptieren (gemäß dem Differential-Ranging-Schema arbeiten) und niemand jemanden stört, kann an einem Satz Bojen in einem Wasserbereich eine beliebige Anzahl solcher Empfänger arbeiten. Das heißt, theoretisch kann theoretisch eine ganze Flotte von Unterwasserfahrzeugen und Tauchern in beliebigen Mengen und Proportionen navigieren.

Aufgrund des Ansturms haben wir den Navigationsempfänger eher beiläufig angeheftet und etwas Auftrieb aus dichtem wärmeisolierendem Material hinzugefügt.
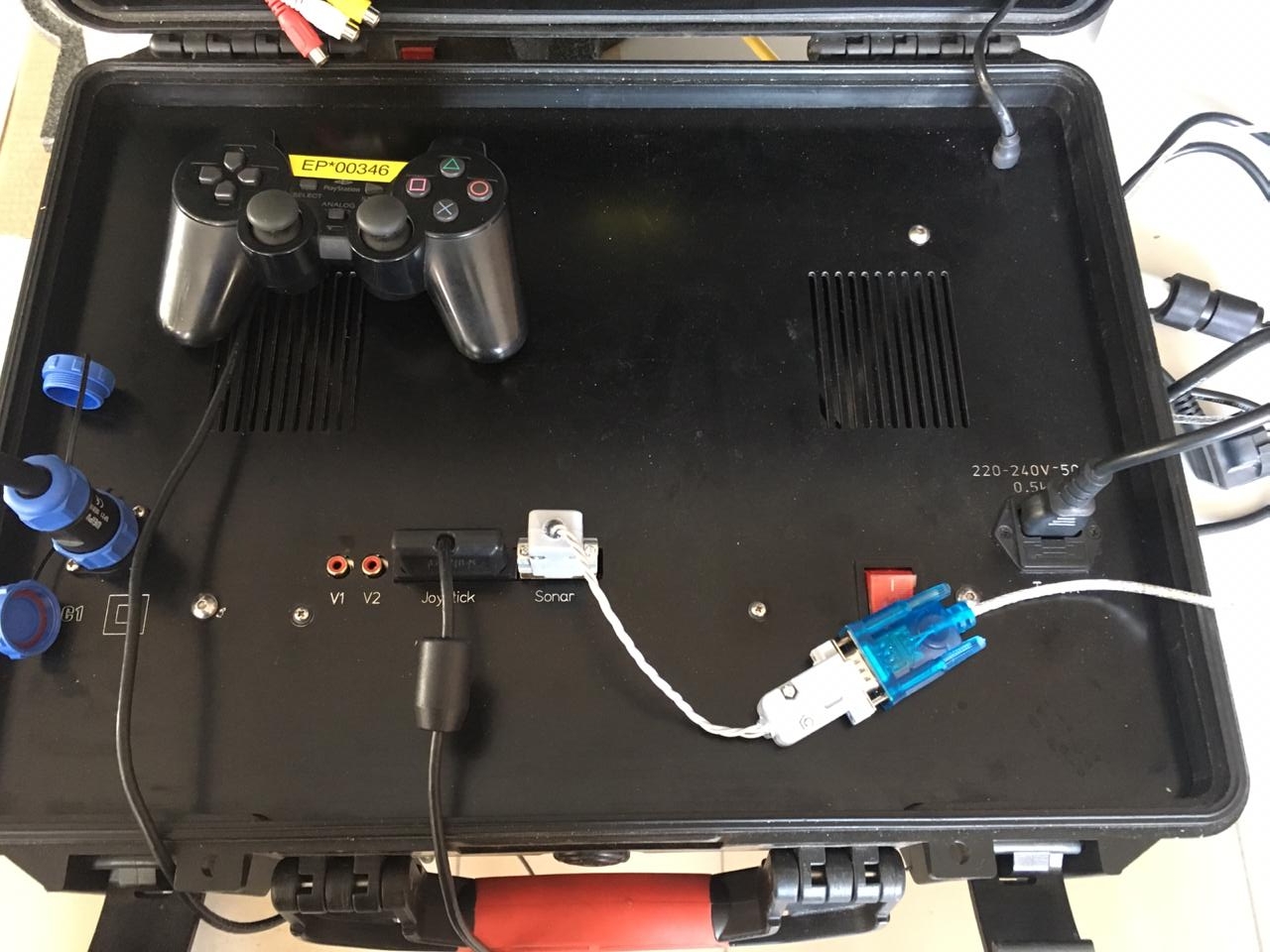
Daten vom Empfänger werden in das Steuergehäuse eingegeben und über den RS232 <-> USB-Konverter („Sonar“ -Anschluss auf dem Foto) in jeden Laptop eingegeben.
Die Koordinaten in diesem System werden am Empfänger erzeugt (d. H. Streng terminologisch ist das System ein Navigationssystem und kein Positionierungssystem). Da die TNLAs jedoch grundsätzlich mit einem Kabel betrieben werden, sollte es keine Probleme geben, den auf dem Gerät berechneten Standort nach oben auf das Kabel zu übertragen. Übrigens emuliert der Navigationsempfänger einen normalen GNSS-Empfänger und kann direkt als gewöhnlicher Oberflächen-GPS-Empfänger verbunden werden, beispielsweise mit der
SAS.Planet- Anwendung, die wir verwenden.
Die Positionierung von Unterwasserrobotern war die Hauptidee, die uns 2015 einfing, als wir mit der Entwicklung unseres Unterwasser-GPS begannen. Die Ironie des Schicksals ist, dass diese Anwendung bis 2018 nicht beansprucht wurde - das System wurde hauptsächlich für Tauchleistungen verwendet.
Dies ist teilweise auf die Tatsache zurückzuführen, dass TNLA-Hersteller ihre Geräte nur sehr ungern modifizieren, teilweise auf die Tatsache, dass Benutzer ein sehr starkes Vorurteil haben, dass das Anordnen von Bojen schwierig und zeitaufwändig ist.
Jetzt wird der Apparat der Prüfungsklasse von allen und jedem gemacht, buchstäblich haben wir bereits die Zählung verloren. Hier ist aus Gründen der Klarheit eine alles andere als vollständige Liste der Hersteller:
- Die ganze
TOP-10 2019- Und noch ein
TOP-12 2019-
Und noch ein TOP , diesmal Budget-Geräte
- Unser
ROVBUILDER- Das
gefeierte OpenROV- Kanadischer
Apparat- Inländisches
GNOM- Verdächtig etwas, das an
Blueye erinnert
- Ein anderes
GerätEs gibt ein Dutzend oder zwei verschiedene Hochschulteams, und wenn Sie sich das ansehen, gibt es immer noch eine Reihe ähnlicher Projekte, da wir nicht einmal die größeren Geräte der Arbeiterklasse und autonome Geräte (das sogenannte AUV oder AUV) berührt haben.
Sie unterscheiden sich kaum voneinander und haben eine sehr ähnliche Funktionalität. Wir glauben, dass Roboterhersteller, die ihre Geräte mit einem einfachen und zuverlässigen Navigationssystem ausstatten, einen entscheidenden Vorteil erhalten.
Als wir drei
anfingen , war einer von uns (
Creathor ) in Moskau und kümmerte sich um alle organisatorischen, finanziellen und Marketingfragen. Ich und
StDmitriev waren in Wolgograd, und wir knietief in kaltem Wasser 4 Bojen aus einem gekauften Schlauchboot zusammen im Zehnkampf. Mit der Zeit brauchten wir 15 bis 30 Minuten. Dies ist teilweise der Grund, warum
meine Hand nach der Mauser greift und mein Gesicht normalerweise Verwirrung ausdrückt, wenn sie mir sagen, dass das Setzen von Bojen schwierig und lang ist.
Noch tiefer
Bei den vier Tests haben wir diesmal alles in zwei Personenkraftwagen eingebaut:

Dieses Gepäck wurde zum Testen benötigt:
- Unterwasserfahrzeug ROVBUILDER RB-150 mit 100 m Kabel und Steuergehäuse
- Gehäuse mit vier RedBASE-Bojen
- 800 Watt Benzingenerator
- Doppelter aufblasbarer Kajak "Shuya"
- Klapptisch mit vier Klappstühlen
- Vier Pflastersteine mit 20-Meter-Seilen als Anker
- Laptop
- Vorrat an Lebensmitteln für 5-6 Stunden für vier Personen
Bei all der scheinbaren Einfachheit könnten wir mit einem solchen Satz von Booten nicht mit dem UHF-System arbeiten. Um die UHF-Antenne zu montieren, benötigen Sie ein Boot mit einem harten Boden und einer Stange. Gleichzeitig müsste es die ganze Zeit auf dem Wasser sein. Das zum Beispiel bei 0 ° Luft ist nicht sehr angenehm und manchmal einfach unmöglich (siehe "Wind, Wellen, Pitching").
Der „Kontrollposten“ wurde in ungefähr 10 Minuten bereitgestellt, und in unserem Fall sah es so aus:

Traditionell werden alle Tests, die ein etwas geräumiges Reservoir erfordern, an der
Mündung des Pichuga-Flusses an der Stelle durchgeführt, an der es in das Wolgograd-Reservoir fließt.
Weiter tauchen
Ich erwähnte, dass Bojen normalerweise in 15 bis 30 Minuten installiert werden und diesmal keine Ausnahme war. Außerdem habe ich speziell die Stoppuhr gestartet, und zwei Leute mit einem Kajak haben es in 24 Minuten geschafft, auf Rudern, die mit dem Wind und der Aufregung kämpften, wie echte Papanins.

Das Foto zeigt, wie sich die Bojen in einem kleinen aufblasbaren Kajak befinden. Alle vier Stücke.
Sie könnten denken, dass das Gerät auch von einem Boot aus eingetaucht ist, aber überhaupt nicht: Das Gerät wird mit Hilfe einer Person, die mit einem Paar Gummistiefeln ausgestattet ist, vom Ufer aus ins Wasser gebracht:

Und hier sind die ersten Bilder der Unterwasserwelt:
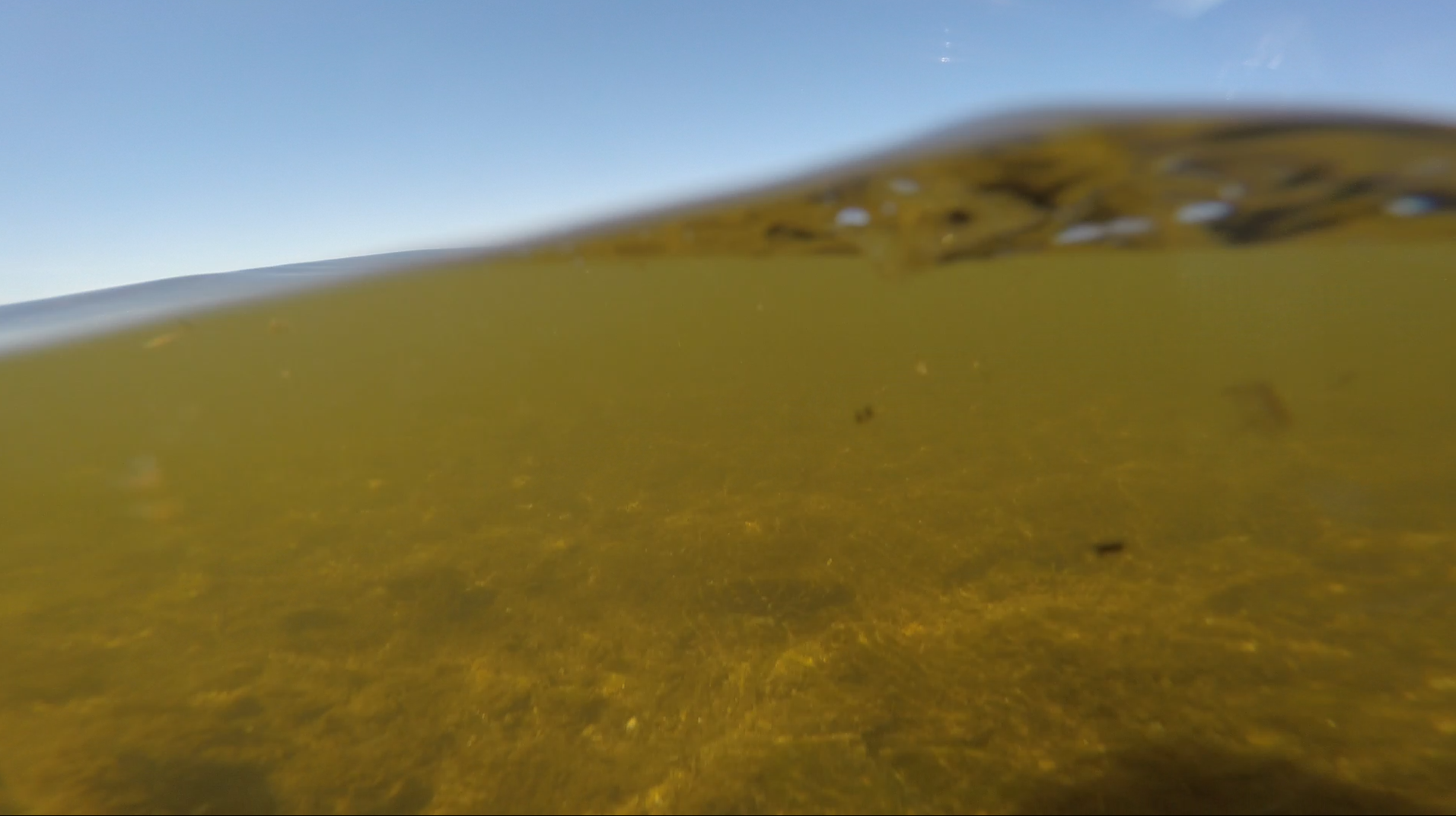

Ja, das ist nicht das Rote Meer für dich :-) Das Wasser scheint transparent zu sein, aber tatsächlich überschreitet die Sichtweite in Küstennähe 1-2 Meter nicht.
Ein ernstes Problem wurde sofort klar - auf dem Bildschirm des Bedieners an einem sonnigen Tag ist nichts klar sichtbar (außer seiner Reflexion):

Gleichzeitig wird GoPRO HERO3 + als Kamera am Roboter installiert. Wir waren verärgert und entmutigt über diese Tatsache, aber es war angesichts des höllisch blinkenden Bildschirms völlig unmöglich, das Bild zu kontrollieren. Vielleicht wird ein Bildschirm diesen Nachteil beseitigen. Einige Roboterhersteller statten ihre Produkte übrigens mit VR-Brillen aus.
Nach dem Hochladen von Videos von der Kamera der Kamera wurde unsere Frustration noch größer: Das Bild ist im Prinzip sehr gut und es ist durchaus möglich, damit zu arbeiten. Wie schade, dass wir das alles dabei nicht gesehen haben!
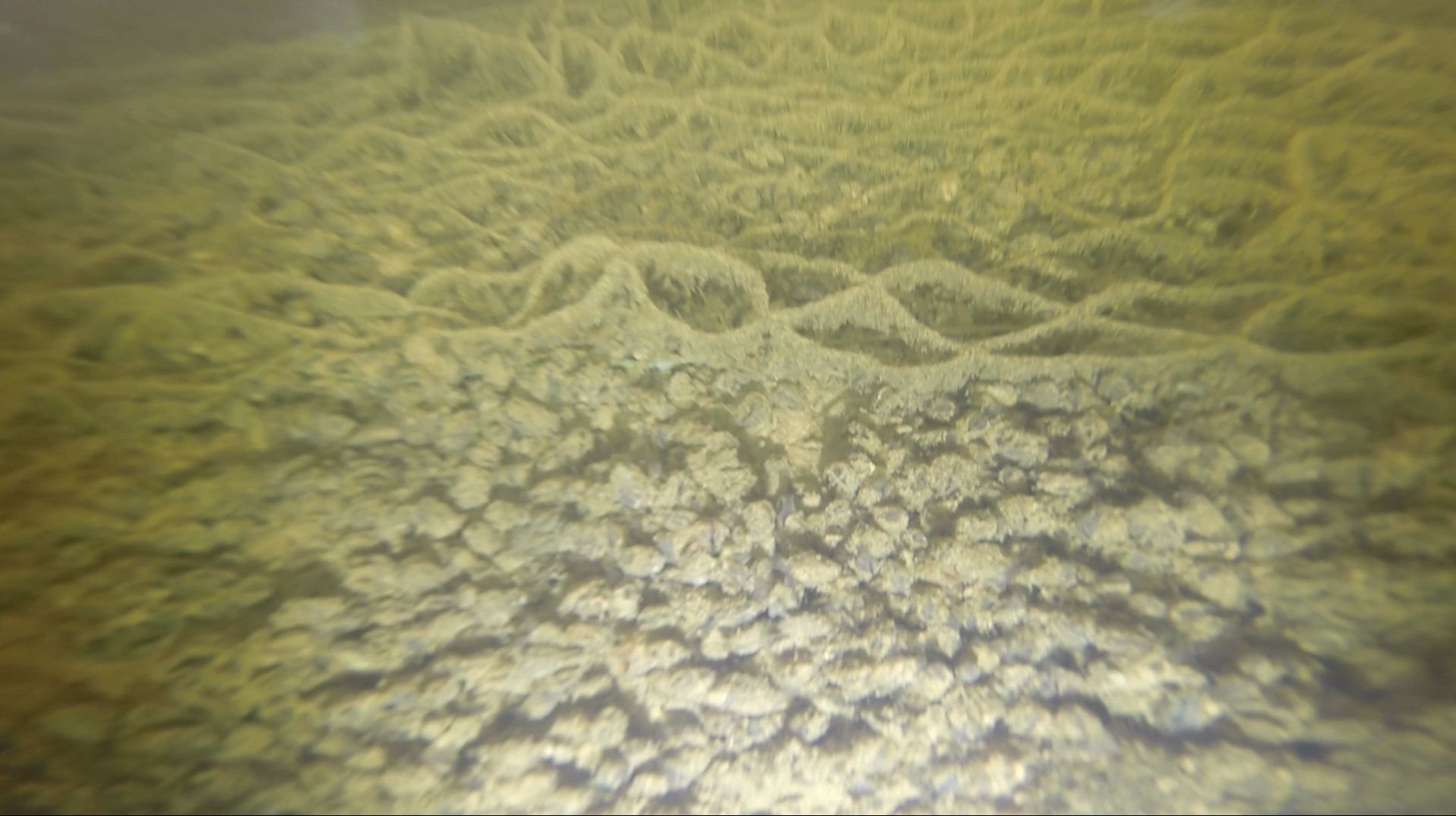
Und hier ist die erste Berührung des Bodens und der Elemente der „Mondlandschaft“ in einer Tiefe von 13 Metern:

Buchstäblich ein paar Sekunden später, nachdem das Gerät ein wenig vorausgesegelt war, stieß es auf einen überfluteten Baumstamm, der mit kleinen Muscheln bewachsen war:

In Wirklichkeit ist die Bildqualität etwas besser, aber ich muss Screenshots von dem Video machen, das mit dem integrierten GoPRO aufgenommen wurde.
Wenn Sie genau hinschauen, sehen Sie im folgenden Bild in der oberen rechten Ecke den ersten Fisch, der auf dem Weg des
Postkreuzers angetroffen wird:

Während des Tests wussten wir noch nicht, dass die Kamera ein gutes und manchmal ausgezeichnetes Bild schreibt, und waren sehr verwirrt über die Notwendigkeit, das Gerät praktisch blind zu steuern.
Trotzdem beschlossen sie, sich an ein vorbestimmtes Szenario zu halten. Es sollte ein gut sichtbares Objekt vom Boot aus überfluten, die Koordinaten dieses Ortes mit Hilfe eines GPS-Telefons speichern und dann versuchen, mit einem Roboter an diesen Ort zu gelangen, der von den Angaben unseres Navigationssystems geleitet wird.
Da der Text normalerweise diagonal gelesen wird, ohne auf Details zu achten, komme ich zu dem Schluss, dass bei diesem System im akustischen Sender der Bojen die Wicklung des Aufwärtstransformators aus Holz bestehen sollte, während die hölzerne EMF darin induziert wird und der Holzstrom fließt.
In einer der Passagen über dem Boden hat die Kamera der Kamera ein ertrunkenes Fischernetz aufgenommen:
An diesem Punkt enden die Sehenswürdigkeiten, die wir beim Testen unter Wasser bekommen haben.
Wer die Qualität des Videos mit eigenen Augen beurteilen möchte, fügt einen Link zu
einem der Datensätze auf Youtube hinzu . Die Aufzeichnung wird ohne Bearbeitung und Bearbeitung gegeben. Diejenigen, die dies wünschen, können unabhängig voneinander zu dem Schluss kommen, dass es bequem ist, sinnvolle Aktionen unter Wasser zu verwalten und auszuführen (z. B. nach etwas zu suchen), nur durch das Bild von der Kamera ohne Navigation.
Wir sind zu dem Schluss gekommen, dass es völlig unmöglich ist, das Gerät nur mit dem Bild zu steuern. Grundsätzlich wurden wir nur von unserem Navigationssystem geführt, das online den aktuellen Standort des Geräts auf der Karte anzeigte.
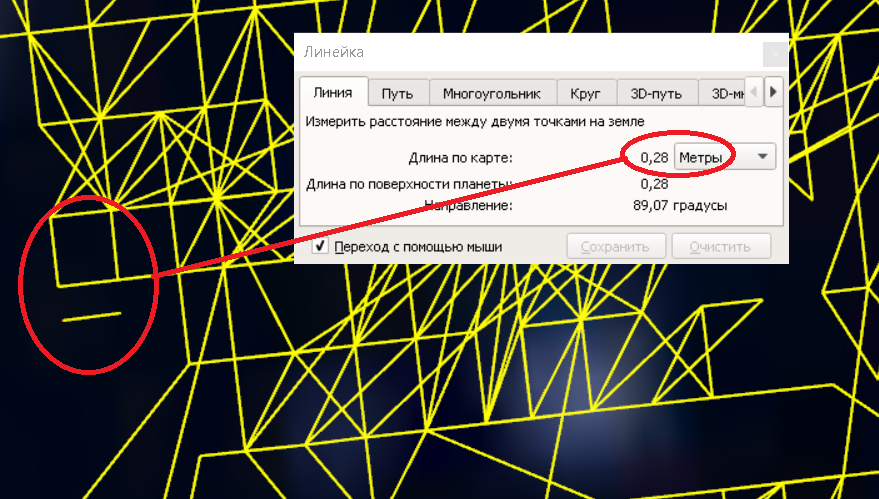
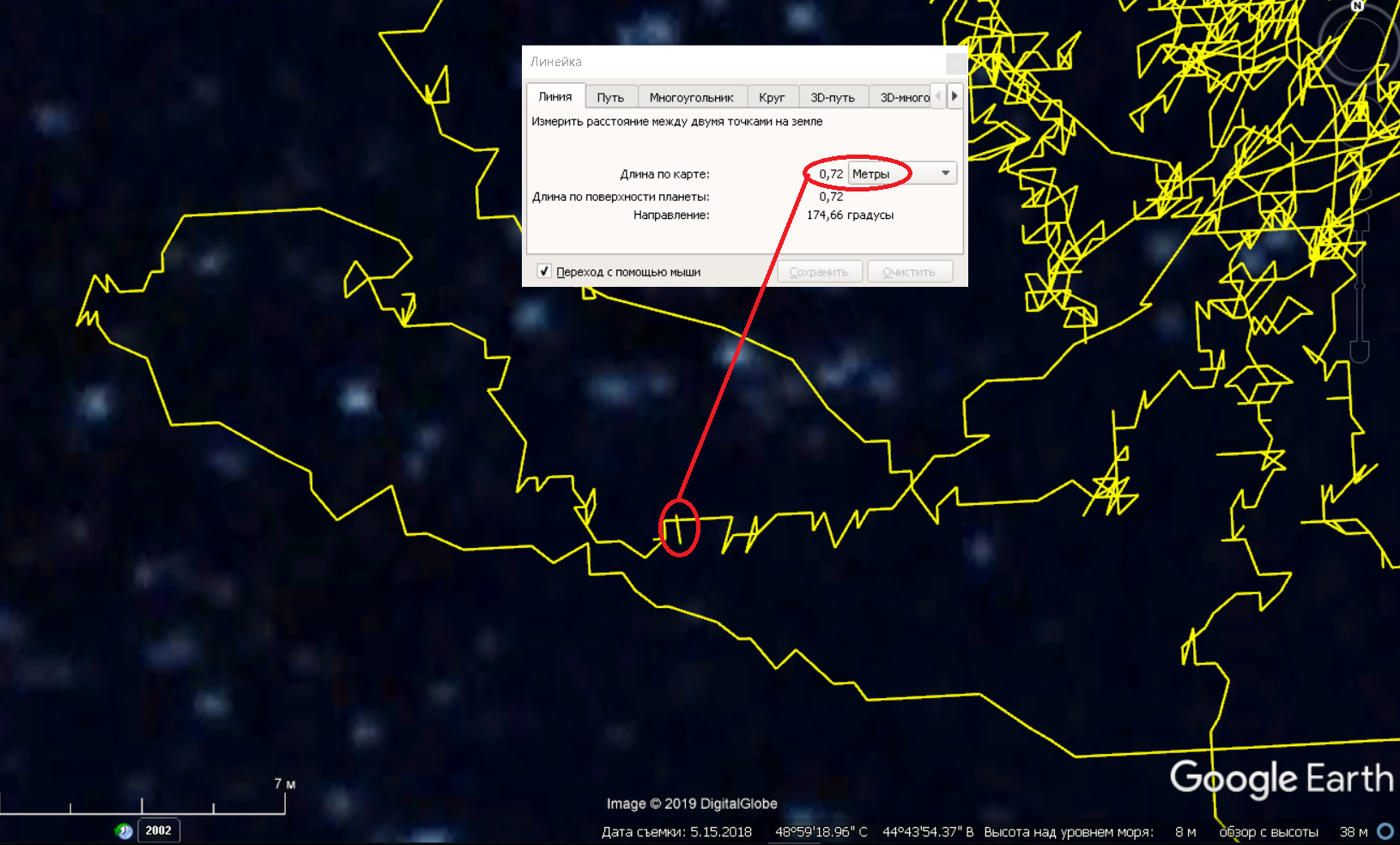
Die Auflösung des Systems in einem realen Reservoir, das etwa 30 Zentimeter beträgt, ist erfreulich, wie aus dem von der Spur gezeichneten Raster ersichtlich ist:
Wie in anderen Fällen liegt die Streuung der Punkte während der Bewegung im Bereich von 1 bis 1,5 Metern:
Die letzte Spur der Bewegung des Geräts sieht folgendermaßen aus:
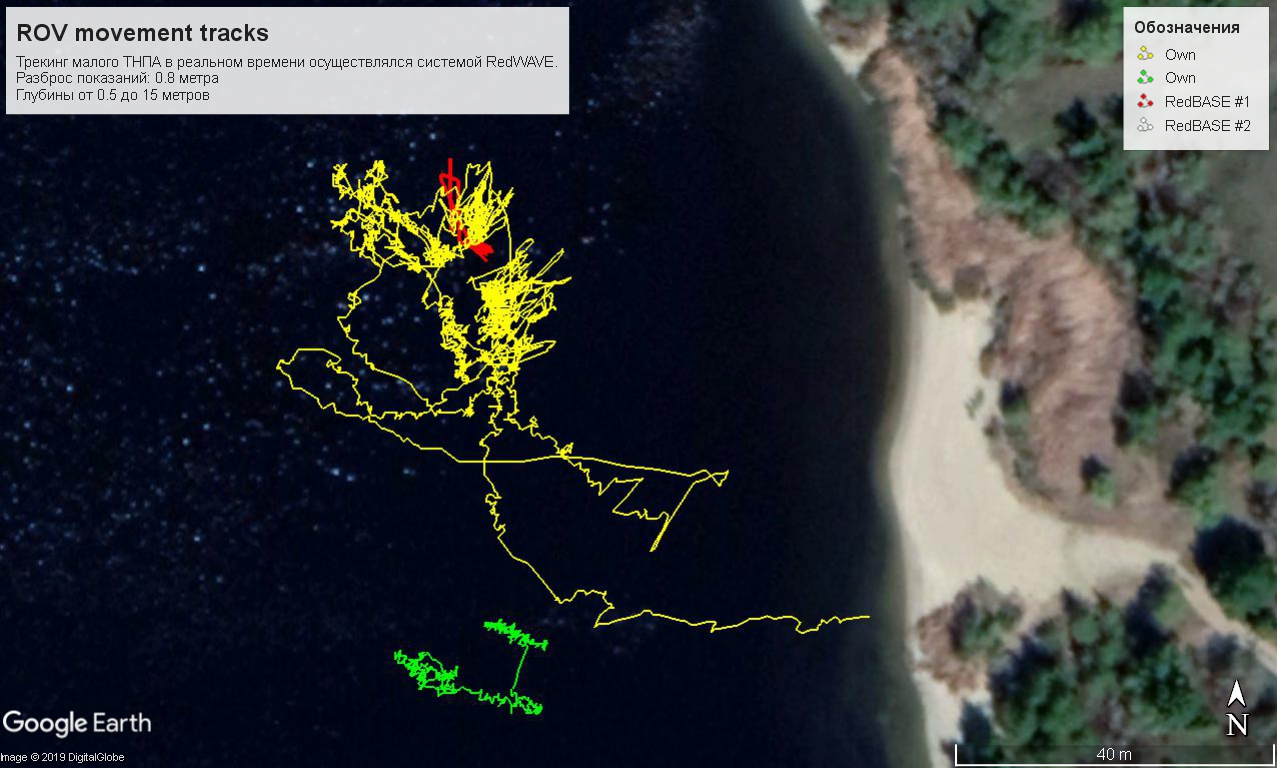
Trotz der Tatsache, dass wir den Arbeitsplatz nicht berechnet haben, liegt ein wenig und fast die Hälfte der Strecke (der linke Teil der roten Linien) außerhalb der Basis, d.h. außerhalb der Bojenfigur, wo das System viel schlechter funktionieren sollte. Mit Ausnahme einiger Emissionen funktionierte das System jedoch normal.
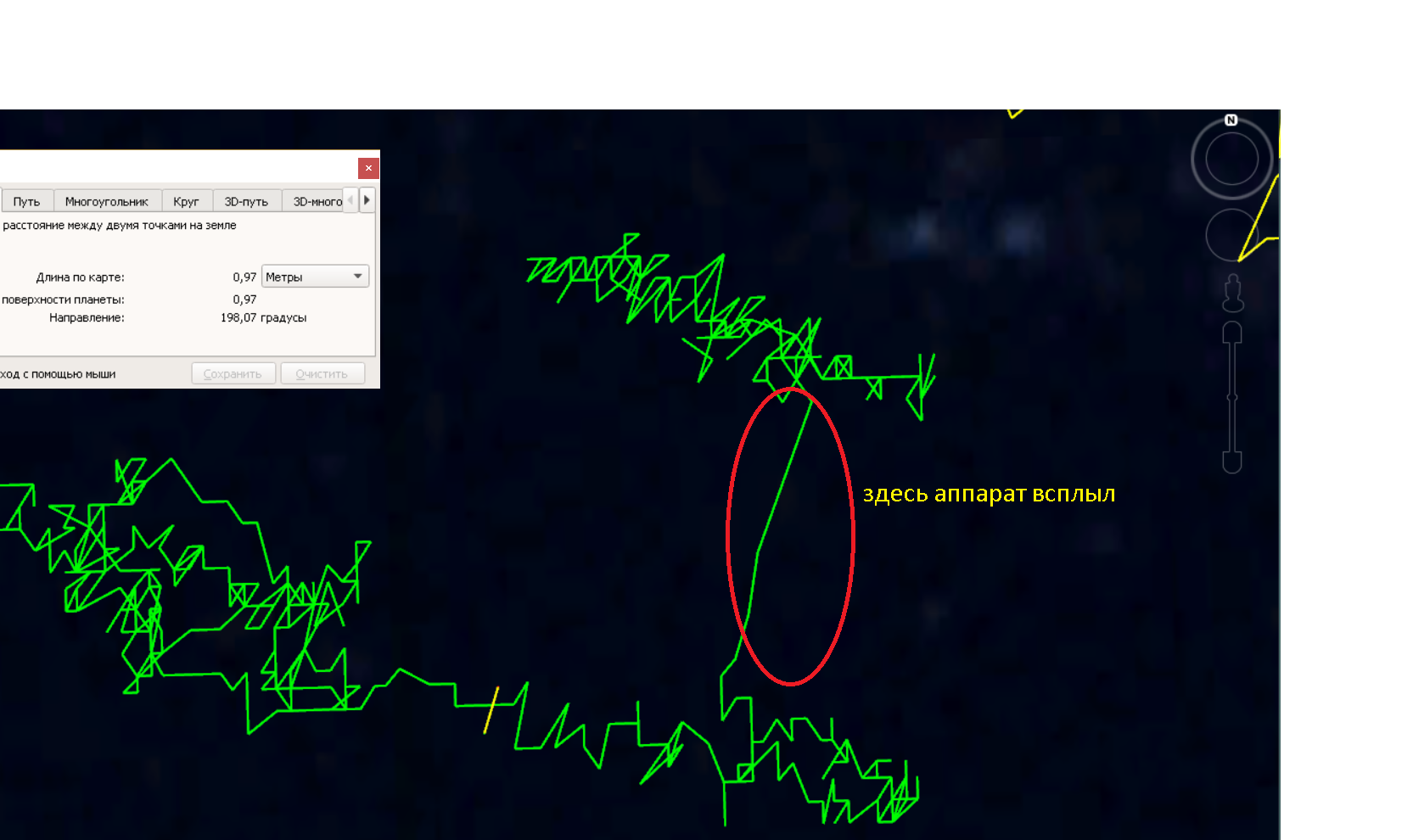
Und in einem der Gänge kam das Gerät dem vorgeschlagenen Ort der Überflutung des Objekts sehr nahe:

Bei sorgfältiger Betrachtung einer Stunde oder länger des von der Bordkamera des Fahrzeugs aufgenommenen Videos haben wir jedoch nie unser gewünschtes Objekt gesehen.
Dafür kann es mehrere Gründe geben: Erstens ist dies für uns buchstäblich die erste Erfahrung mit der Steuerung des Geräts in einem realen Gewässer, und zweitens hat uns der Blendbildschirm die Möglichkeit genommen, online zu "beobachten", was im Wasser in der Nähe des Geräts geschieht. Drittens reagiert das Gerät
heftig und heftig auf die „Lenkraddrehung“, und es ist sehr schwierig, es aus einer ungewohnten Position heraus zu steuern. Es ist sogar schwierig, eine unkomplizierte Bewegung aufrechtzuerhalten.
Nur für den Fall, ich lege den
resultierenden Track bei, damit diejenigen, die selbst interessiert sind, ihn verdrehen können.
Unten
Abschließend möchte ich sagen, dass wir alle wie ein Stein aus der Seele gefallen sind - wir haben das System schließlich auf seinen beabsichtigten Zweck getestet.
Wir haben ein sehr gutes Ergebnis (und Erfahrung!) Erhalten, ein Unterwasserfahrzeug verwaltet, Pilzsuppe auf Holzkohle gekocht, ein Foto gemacht und im Allgemeinen einen positiven Tag gehabt.Vielen Dank für Ihre Aufmerksamkeit, wie immer, wir sind unendlich dankbar für das Feedback und die konstruktive Kritik!UPD!
Wir haben ein kurzes Video mit einigen Erklärungen zusammengestellt . Einschließlich des Prozesses der Anzeige der Flugbahn des Geräts in Echtzeit in SAS.Planet