Wenn Sie jemals Software geschrieben haben, um einen Roboterarm oder einen roboterähnlichen Mechanismus im Allgemeinen mit mehr als drei Freiheitsgraden zu steuern, wissen Sie, dass die meiste Zeit erforderlich ist, um die Bewegungen selbst zu programmieren. Stellen Sie sich nun vor, Sie hätten einen Roboterarm gebaut, indem Sie die Glieder und Antriebe nach Ihren Wünschen verbunden haben, und die Software hat die Länge der Glieder, ihre Position, Drehwinkel usw. bestimmt.
Genau das haben Forscher von Columbia Research getan, als
sie eine Software geschrieben haben, die
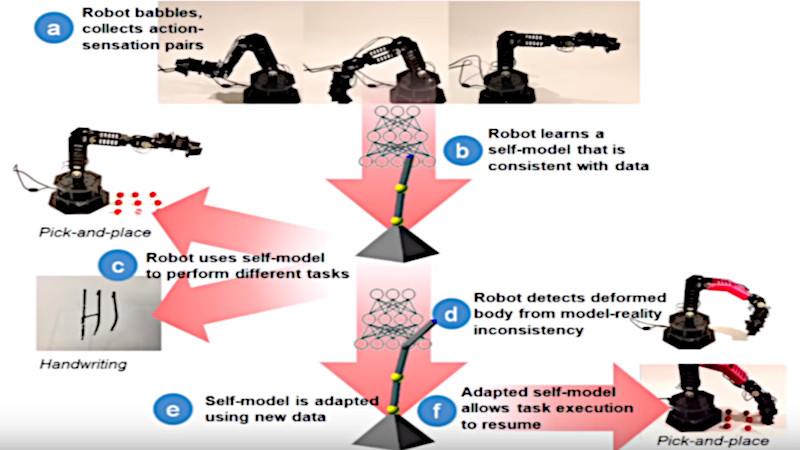
lernt, wie man einen von ihnen gesteuerten Roboterarm einrichtet , ohne eine anfängliche Vorstellung von der Physik, Geometrie oder den dynamischen Eigenschaften von Motoren zu haben. Unmittelbar nach dem ersten Start weiß er nicht, welche Form des Roboters, wie seine Motoren funktionieren, wie und was jeder von ihnen beeinflusst. Etwa anderthalb Tage lang konfiguriert die Software den eingebauten Simulator so, dass der virtuelle Roboter so physisch wie möglich ist, indem sie zunächst vorsichtige Bewegungen ausführt, die zufällig erscheinen, und Feedback über das Geschehen erhält.
Projektmanager Lipson und sein Doktorand Robert Kwiatkowski experimentieren mit einem Gelenkroboterarm mit vier Freiheitsgraden. Zu Beginn des Software-Trainings war das Modell ungenau und die Reihenfolge der Verbindung der Links wurde nicht bestimmt. Nach 35 Stunden Training entsprach das Modell der Realität mit einer Genauigkeit von nicht weniger als vier Zentimetern. Dann zwang die Software den Roboruk, Objekte aufzunehmen und zu bewegen, während nach jeder Bewegung eine zusätzliche Neukalibrierung gemäß dem Modell erfolgte, das nur durch unabhängiges Training gebildet wurde.
Um festzustellen, ob eine solche Software Schäden am Roborarm erkennen kann, wurde anstelle eines der Teile ein ähnliches, aber speziell verformtes Exemplar gedruckt. Die Software stellte fest, dass sie sich geändert hatte, und nahm entsprechende Änderungen am Modell vor. Bald erledigte es die Aufgaben des Hebens und Bewegens von Gegenständen nur geringfügig schlechter.
Da die interne Vorstellung der Software über das Gerät des Roboters nicht statisch ist, kann er nicht nur immer besser handeln, sondern sich auch an Schäden und strukturelle Veränderungen anpassen. Außerdem wird weiterhin alles mit dem allmählichen Verschleiß von Teilen und deren Ersatz durch leicht unterschiedliche Formen funktionieren.
Natürlich wird ein Roboruk, der von einer solchen Software verwaltet wird, nicht sehr bald so genau wie
Dexter, ein Roboruk mit traditioneller Software, der seinen Entwicklern beim Hackaday-Wettbewerb 2018 einen Preis verliehen hat , aber es ist interessant zu sehen, wie es funktioniert: