Hallo Habr. In diesem Artikel werde ich über einen einfachen kontrollierten Crawler-Roboter sprechen, der aus einem alten CD-Laufwerk hergestellt wurde. Ich möchte nur eine Idee vermitteln, kein bestimmtes Design, damit jeder auf Wunsch etwas Ähnliches aus den verfügbaren Details machen kann. Der Artikel enthält viele helle Bilder und drei Gifs mit insgesamt 25 MB.
Wenn jemand mehr Videos sehen möchte, ist
hier ein Video über diesen Roboter .
Viele Elektronikbegeisterte denken darüber nach, was mit veralteten CD-Laufwerken in unserer Zeit alles möglich ist. Die häufigste Anwendung ist ein Lasergravierer vom Laserkopf eines DVD-Brenners und eine Koordinatentabelle mit zwei Bewegungen von diesem Kopf. Automatische Türen werden normalerweise aus einem Schiebetisch für eine Scheibe hergestellt (zum Beispiel für Katzen oder Hamster). Ich habe zwei Spielsachen aus einem ausziehbaren Tisch gemacht: ein "nutzloses Auto" und einen kriechenden Roboter. Ich werde nicht über ein nutzloses Auto sprechen, weil es sehr einfach ist. Wen kümmert es, du kannst dir ein
Video über sie ansehen.
Die Idee eines kriechenden Roboters ist jedoch auch sehr einfach. Wenn jemand mit dem Design eines CD-Laufwerks nicht vertraut ist,
können Sie dies auf Wikipedia nachlesen .
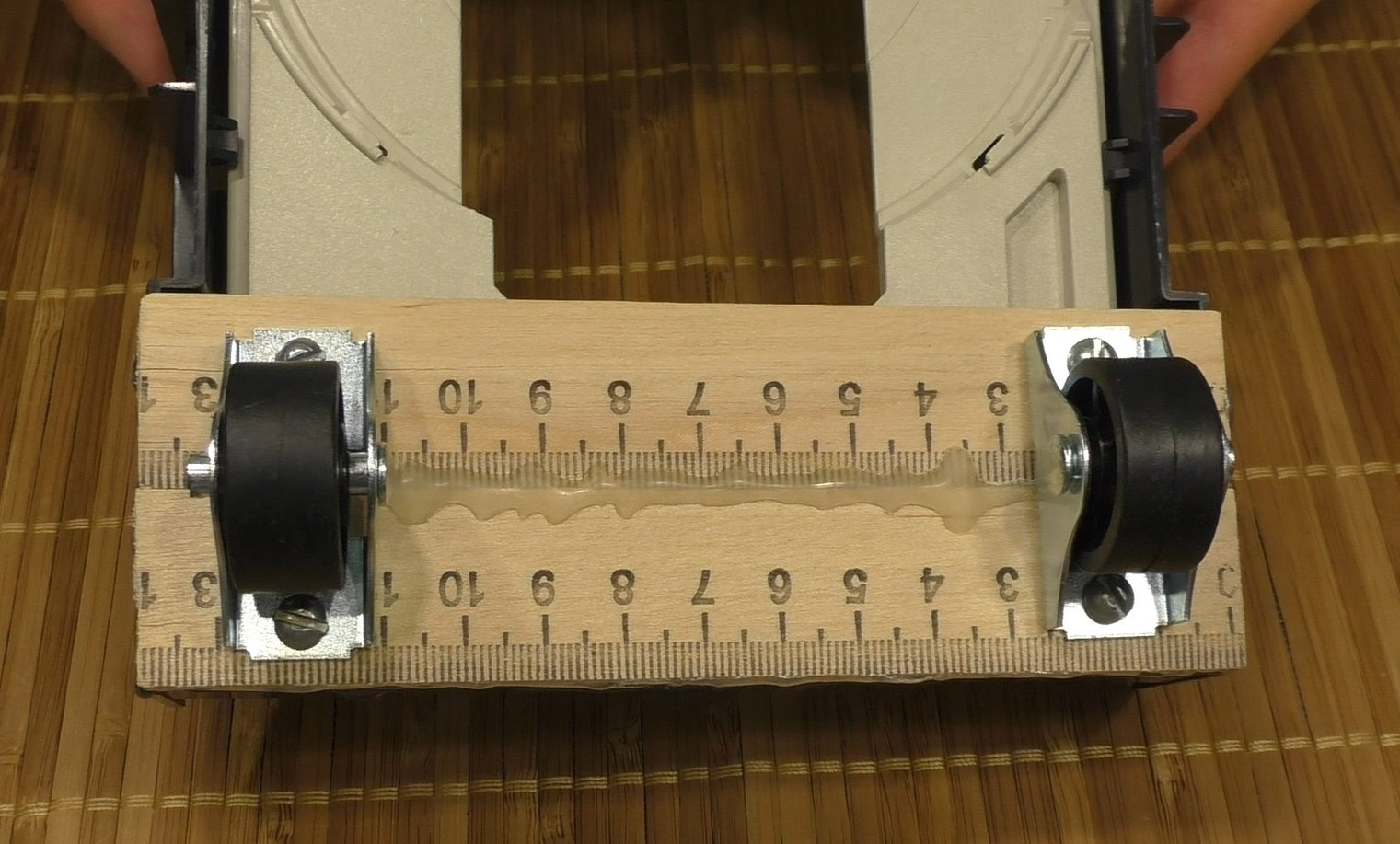
Ich werde mit einer theoretischen Beschreibung beginnen. Die folgende Abbildung zeigt ein seitlich kriechendes CD-Laufwerk. Er hat zwei frei drehbare Räder hinten, die "Stützräder" genannt werden. Vorne befindet sich ein „Lenkrad“ mit eigenem Motor. Darunter befinden sich zwei ausziehbare Stützen zum Anheben des Lenkrads.
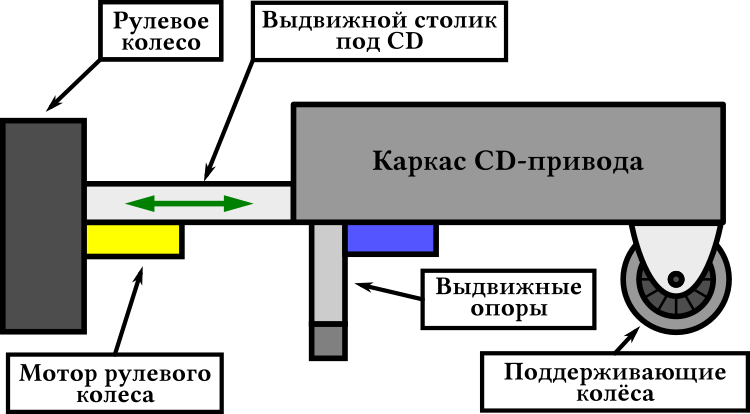
In der folgenden Abbildung erwies sich die Vorderansicht jedoch als wenig verstanden.

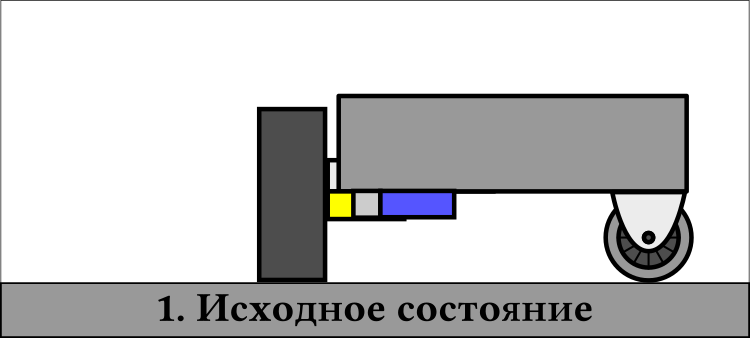
Wie sich dieses System einschleicht, ist auch in den Abbildungen dargestellt. Es gibt also einen Anfangszustand, in dem der Schiebetisch von der CD und die Stützen hineingedrückt werden. Von dieser Position aus beginnt sich der Roboter vorwärts und rückwärts zu bewegen und führt eine Drehung durch.
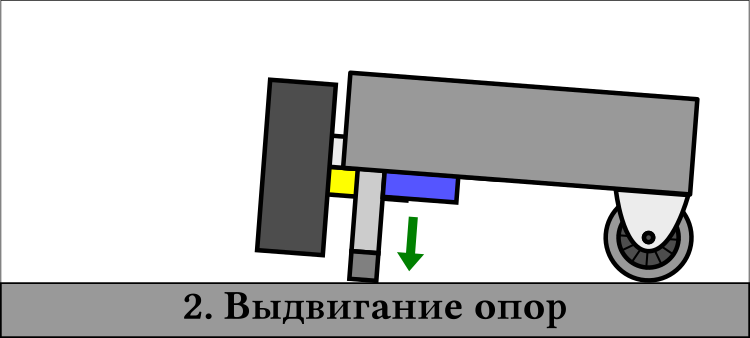
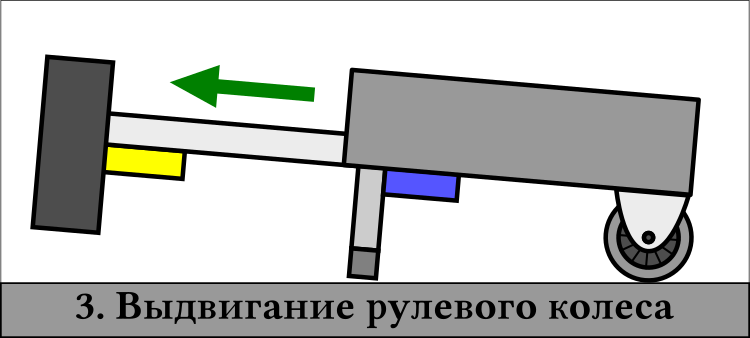
Um sich vorwärts zu bewegen, werden die Stützen zuerst ausgefahren, wodurch das Lenkrad angehoben wird.
Dann erstreckt sich der CD-Tisch zusammen mit dem Lenkrad.
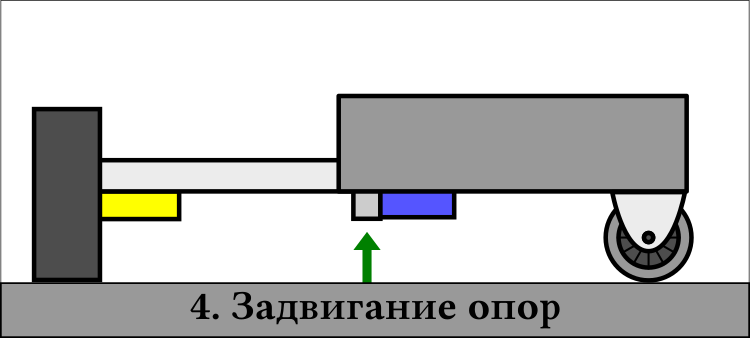
Ferner ziehen sich die Stützen zurück und das Lenkrad senkt sich.
Jetzt muss der ursprüngliche Zustand wiederhergestellt werden, indem die Tabelle für die CD verschoben wird.
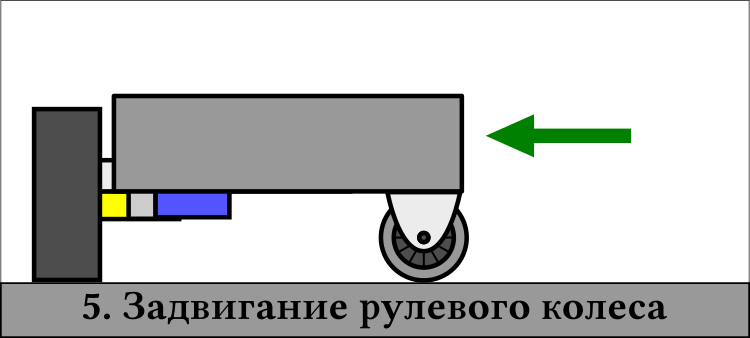
In diesem Fall haftet das Lenkrad an der Bodenfläche, sodass der gesamte Rahmen des CD-Laufwerks zum Lenkrad gezogen wird. Als nächstes wiederholt sich der Zyklus.
Um den Roboter in den Ausgangszustand zu bringen, wird der Lenkradmotor eingeschaltet, während sich das gesamte System um 360 Grad um eine Achse dreht, die sich irgendwo zwischen den Stützrädern befindet.
Wenn Sie verstehen, wie dieses Ding funktioniert, fällt es Ihnen nicht schwer, sich vorzustellen, wie die Rückwärtsbewegung ausgeführt wird.
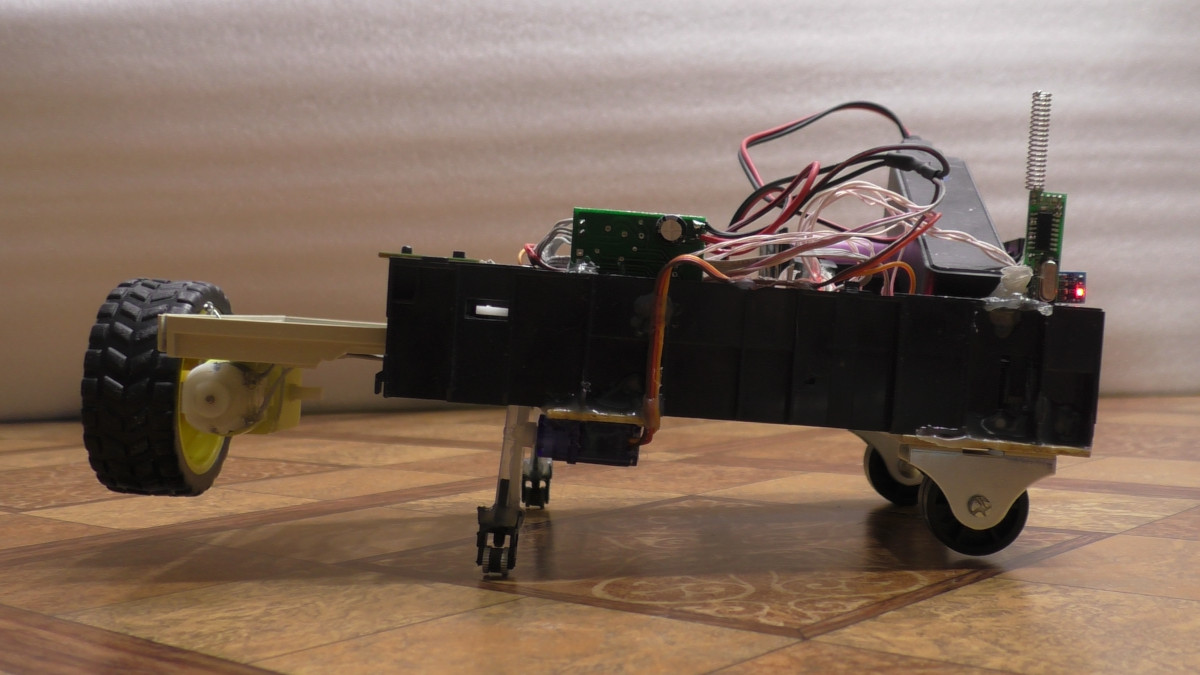
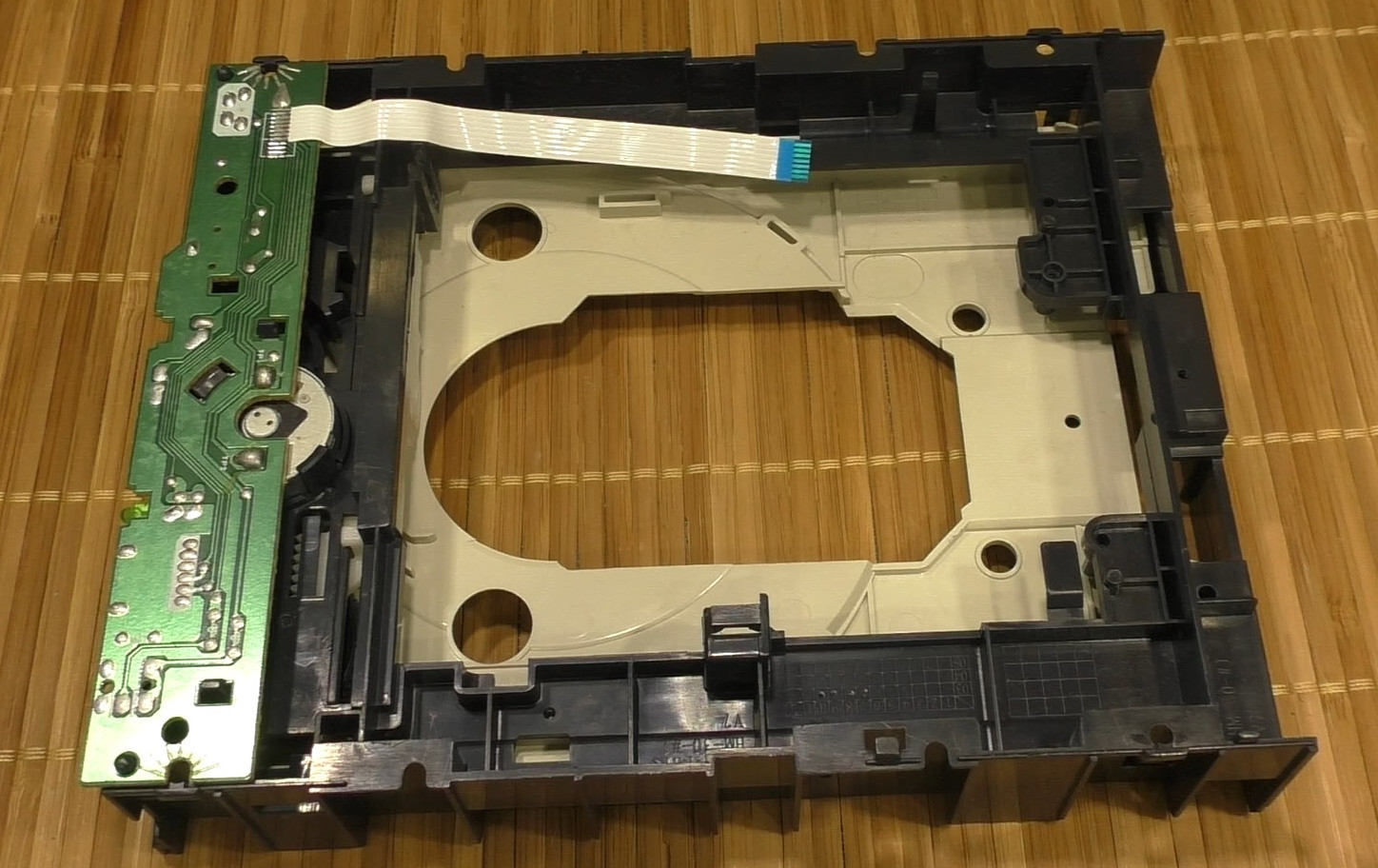
Nun ein wenig zu meiner Implementierung. Ich werde es nicht im Detail erzählen, da alles willkürlich gemacht wurde, nur um die Arbeitsfähigkeit der Idee zu überprüfen. Ich benutzte ein einfaches CD-Laufwerk als Basis, nahm die gesamte Optik mit einem Schieber heraus, es gab nur einen Kunststoffrahmen mit einem versenkbaren Tisch, einem Motor und Knopfendschaltern für den Tisch.
Angebrachte Möbelräder als Stützräder.
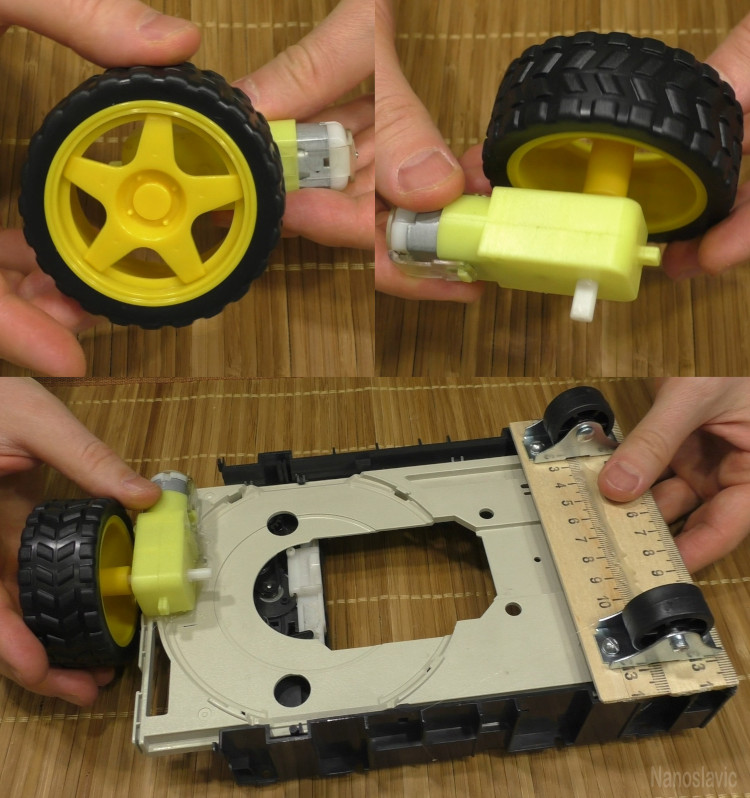
Ich habe das Lenkrad irgendwo im Internet separat gekauft. Er hat einen Motor und ein Plastikgetriebe.
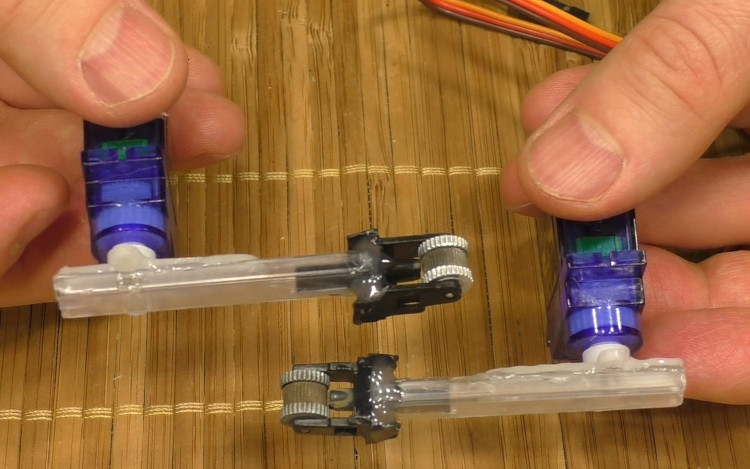
Versenkbare Stützen aus Kunststoffrohren, die im Gehäuse SO8 in Bulk-Chips verkauft werden. Ich befestigte einen Stuhl von den Feuerzeugen an ihnen, nachdem ich zuvor den Feuerstein entfernt und von ihnen gefedert hatte, damit sich der Stuhl frei drehen konnte. Zur Verlängerung der Stützen wurden zwei billige Servos verwendet. Alles wird hauptsächlich auf Schmelzkleber montiert.
Die Elektronik wurde aus dem gemacht, was sie war, daher ist sie nicht optimal. Zur Steuerung der Motoren des CD-Tisches und des Lenkrads wurde eine Brückenschaltung mit Transistoren verwendet. Dies ermöglichte es, die Drehrichtung zu ändern. Als Logik - eine Art Arduino-Board. Um die Bewegung zu steuern, nahm er einen Schlüsselanhänger und eine Empfängerantwortschaltung mit einer Frequenz von 434 MHz.

Um die Motoren mit Strom zu versorgen, habe ich drei Lithium-Ionen-Batterien ohne Schutz in Reihe geschaltet. Deshalb habe ich sie mit Vorsicht eingeschaltet und manchmal ihre Ladung überprüft. Um den digitalen Teil und das Radio mit Strom zu versorgen, habe ich eine kleine billige Powerbank verwendet, die 5 V ausgibt.
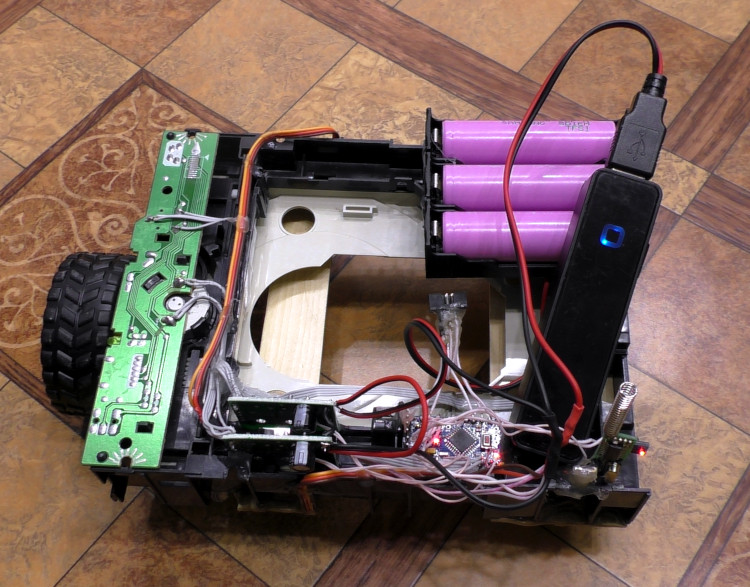
Die Batterien auf der Rückseite sind sehr praktisch, da das Lenkrad beim Vorwärtsschieben stark überwiegt.
Wenn das Steuerprogramm eingeschaltet ist, überprüft es die Enden der CD-Schublade und stellt den ursprünglichen Zustand des Systems wieder her. Zur Steuerung werden 4 Tasten verwendet. Wenn Sie die Taste "Vorwärts" drücken, beginnt die Vorwärtsbewegung. Das Anhalten und Zurückkehren in den Ausgangszustand des Systems erfolgt, wenn Sie eine beliebige Taste auf der Fernbedienung drücken. Wenn die Taste „Zurück“ gedrückt wird, bewegt sie sich rückwärts, auch mit einem Stopp, wenn eine Taste gedrückt wird. Die Tasten Links und Rechts funktionieren nur im Ausgangszustand und nur während sie gedrückt werden.
Als Ergebnis stellte sich heraus, dass nur die Vorwärtsbewegung normal funktioniert. Wenn Sie sich rückwärts bewegen, verschiebt sich der Schwerpunkt stark, wenn das Lenkrad ausgefahren ist, sodass die Stützen es nicht normal anheben können. Benötigen Sie stärkere Servos. Da das System immer in seinen ursprünglichen Zustand zurückkehrt, ist eine Bewegung nur mit den „Schritten“ möglich, die durch die Länge der Tabelle für die CD bestimmt werden. Dies ist jedoch eine reine Softwareeinschränkung.
Und zum Schluss noch ein paar Gifs.
Vorwärtsbewegung, Seitenansicht, 6,8 MB Vorwärtsbewegung, Draufsicht, 7,8 MB Drehen, Ansicht von oben, 6,3 MB Ich denke, dass das gesamte System vereinfacht werden kann, indem ein Bedienfeld in einer Schleife erstellt und die Motoren mit Tasten und Schaltern gesteuert werden. Um die Servos zu steuern, können Sie einen einfachen Generator für die Timer 555 herstellen. Die Stromversorgung kann mit normalen Batterien erfolgen und in die Fernbedienung eingelegt werden, wodurch das Gewicht des Roboters verringert wird. Mit einer solchen Fernbedienung können Sie den Roboter vollständig manuell steuern.
Vielen Dank für Ihre Aufmerksamkeit und Ihr gutes Handwerk.