
Es dauert noch etwas mehr als zwei Monate, bis der FEDOR-Roboter auf der ISS gestartet wird, und der Prozess seiner Umwandlung in einen Cyber-Kosmonauten ist fast abgeschlossen.
In
Fortsetzung dieser Veröffentlichung .
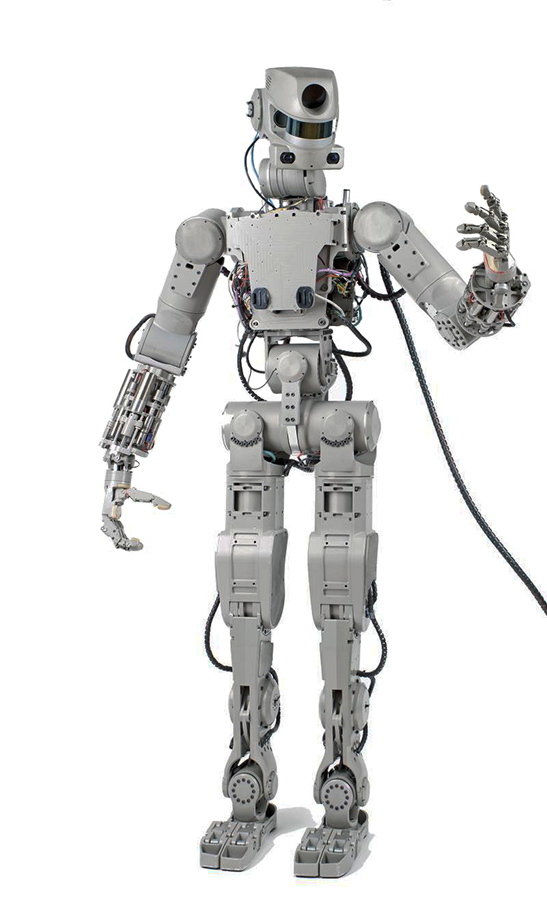
Der Fedor-Roboter oder FEDOR (Final Experimental Demonstration Object Research) ist ein anthropomorpher Roboter, der von der Android Technique NGO und der Advanced Research Foundation (FPI) entwickelt wurde und eine Person an Orten mit hohem Risiko ersetzen sollte.
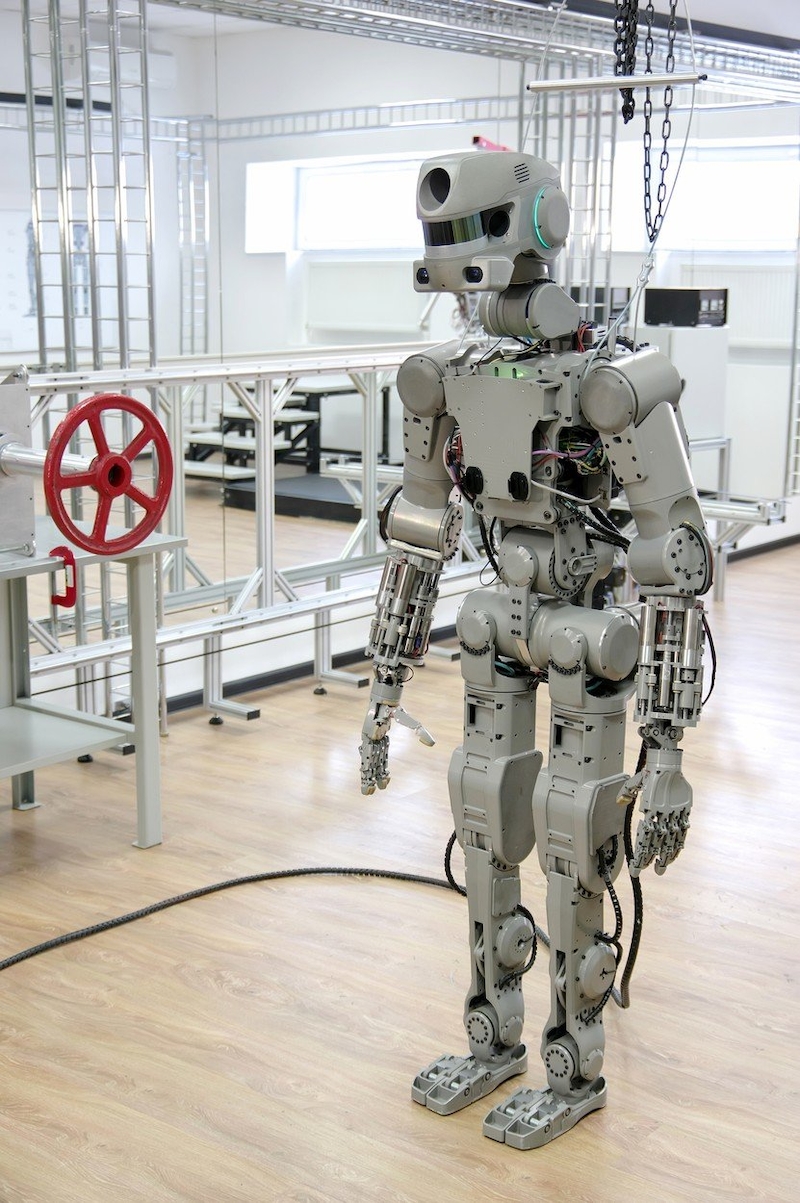 Eigenschaften des FEDOR-Roboters:
Eigenschaften des FEDOR-Roboters:- fast 190 cm groß;
- Gewicht bis zu 160 kg (abhängig von den verwendeten Modulen);
- Leistung bis zu 13,5 kW (20 PS), Batterie - externe Schulranzen- oder Kabelleistung;
- besteht aus 15 Tausend Teilen;
- Software: Echtzeit-Betriebssystem, entwickelt in St. Petersburg auf Basis von Linux, Steuerungssoftware in C ++, C # und Python;
- Offline-Arbeit bis zu 1 Stunde;
- Ausgestattet mit zwei Kameras, Wärmebildkamera, Mikrofon, GPS, GLONASS, 15 Entfernungsmesserlasern und einem speziellen System zur Bestimmung der Position Ihres Körpers;
- Die Videokanäle des stereoskopischen Bildverarbeitungssystems des Roboters können sowohl gemeinsam als auch getrennt arbeiten (durch gemeinsame Arbeit der Kanäle können Sie den Abstand zu Objekten bestimmen und getrennt - mindestens zwei Funktionsaufgaben gleichzeitig lösen, z. B. Arbeitsaktionen mit zwei verschiedenen Werkzeugen gleichzeitig ausführen).
- Betriebsarten: Standalone, Kopieren (wiederholt genau die Aktionen des Bedieners);
- Die Robotermechanik kann nahezu jede Bewegung des menschlichen Körpers reproduzieren, und Software, einschließlich nachgefüllter Bibliotheken, ermöglicht es Ihnen, die beruflichen Fähigkeiten des Roboters zu erweitern.
Es stellt sich heraus, dass in Roscosmos geplant war, am 22. August 2019 zwei FEDOR-Roboter gleichzeitig mit dem unbemannten Fahrzeug Sojus MS zur ISS zu schicken.
Dieses Weltraumtestprojekt wurde Cyber Crew genannt. Die vollständige Umsetzung dieses Projekts ist jedoch noch fraglich.
Das Problem ist, dass der FEDOR-Roboter in diesem Fall nach Konstruktionsberechnungen nicht als wissenschaftliche Ausrüstung durchläuft, die kompakt im Frachtraum platziert und ausgepackt und an Bord der ISS verwendet werden kann, sondern als vollwertiges humanoides Konstrukt, das wie gewöhnliche Astronauten im Schiff platziert werden muss "Union MS-14."
Da Astronauten auf der ISS erstens nicht darauf trainiert sind, ein derart komplexes Gerät zusammenzubauen, können sie es gemäß den Anweisungen der Erde zusammenbauen, aber dafür wird wertvolle Raumzeit aufgewendet.
Zweitens sollte dieser erste Testflug der "Cyber-Crew" auf jeden Fall viele Probleme und Probleme aufdecken, die sowohl an Bord der ISS im aktuellen Betriebsmodus gelöst als auch berücksichtigt und analysiert werden, um die wissenschaftlichen Projekte weiterer Missionen anzupassen.
Es bestand also sofort die Notwendigkeit, die Roboterstrukturelemente für Weltraumstandards fertigzustellen.
Nachdem die erste Version des FEDOR-Roboters an Roscosmos und die SP Korolev Rocket und Space Corporation Energia (RSC Energia) übertragen worden war, um die Möglichkeit ihrer Verwendung in bemannten Programmen zu untersuchen, hatten Raumfahrtingenieure von Roscosmos neue Aufgaben vorzubereiten FEDOR Roboter für eine Weltraummission in relativ kurzer Zeit.
Der auf Roscosmos übertragene Komplex umfasst Elemente: einen mobilen Roboter, Bedienfelder, Integrationswerkzeuge und das Bodensegment.
Platzbedarf für Astronauten:
 Die Weltraumversion des FEDOR-Roboters wurde im Gegensatz zur zivilen Version verbessert:
Die Weltraumversion des FEDOR-Roboters wurde im Gegensatz zur zivilen Version verbessert:- reduziertes Robotergewicht auf 105 kg;
- Der Schultergürtel wurde um einige Zentimeter verkleinert (um den Abstand entlang des Durchmessers der Luke zu vergrößern, der sechs bis sieben Zentimeter betrug, und in Tests stellte sich heraus, dass es unpraktisch war, ihn zu entfernen).
- Ersetzte normale Batterie, um die Sicherheitsanforderungen des Raumfluges zu erfüllen;
- neue Laufwerke installiert;
- Das Design des Roboters wird auf einem Vibrationsständer getestet.
Derzeit sind alle Systeme des angepassten Roboters der FEDOR-Kosmonaut-Version betriebsbereit und flugbereit.
Mit der Fertigstellung des regulären Stuhls für den FEDOR-Roboter mussten die Ingenieure von RSC Energia basteln.

Derzeit ist dieses Problem behoben. Der FEDOR-Astronaut wird mit dem Raumschiff Sojus MS-14 zur ISS fliegen, nicht in der regulären Unterkunft des Astronauten (es stellte sich heraus, dass es für den Roboter selbst im am besten angepassten Zustand nicht ausreicht), sondern in einem speziell angefertigten „Stuhlrahmen“. aus Aluminiumlegierungen, die die Komponenten und Mechanismen des Roboters während des Fluges vor äußeren Einflüssen schützen.
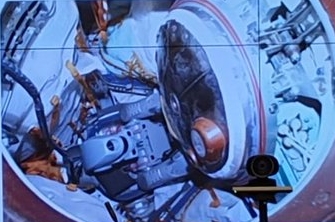
Die erste Version des „Stuhlrahmens“ für den Roboter sah folgendermaßen aus:
Nach dem Andocken an die ISS in Schwerelosigkeit müssen die Astronauten den Roboter ohne Anpassungen vom Raumschiff zur ISS übertragen und weiter damit arbeiten. Daher versuchen sie in Roscosmos und RSC Energia, diese Aufgabe so weit wie möglich zu vereinfachen und die Transportzeit des Roboters so gering wie möglich zu halten. und in Zukunft, wenn unter Weltraumbedingungen getestet.
Im Allgemeinen hat der anthropomorphe Roboter Fedor die ISS noch nicht bestiegen, aber bereits viele Aufgaben für Ingenieure auf der Erde und Astronauten an Bord des Orbitalkomplexes gestellt.
Der Start der Trägerrakete Sojus-2.1a mit dem unbemannten Fahrzeug Sojus MS-14 ist für den 22. August 2019 geplant. Das Raumschiff bleibt ungefähr anderthalb Wochen in der ISS und kehrt dann automatisch zur Erde zurück.
Im Rahmen dieses Testfluges ist übrigens geplant, das Zusammenspiel des digitalen Raketensteuerungssystems und der analogen "Füllung" des Rettungssystems zu testen. Wenn etwas schief geht, sollte der Roboter weiterhin funktionsfähig bleiben.
Und die ISS wechselt jetzt die Besatzung.
Der russische Kosmonaut Oleg Kononenko, der Kanadier David Saint-Jacques und die Amerikanerin Anne McClain werden von der ISS auf die Erde zurückkehren. Sie kamen im Dezember 2018 am Bahnhof an.
Die Übergangsluken zwischen der ISS und Sojus werden am 24. Juni um 23.10 Uhr Moskauer Zeit geschlossen. Das Abdocken von der Station ist für den 25. Juni 2019 um 2.25 Uhr geplant, die Einbeziehung der Schiffsmotoren für den Abstieg aus der Umlaufbahn um 4.54 Uhr.
Am 20. Juli 2019 ist geplant, die ISS an Bord der Sojus-Besatzung MS-13 zu schicken, die aus Alexander Skvortsov, Andrew Morgan und Luca Parmitano besteht.
So treffen Alexei Ovchinin (Russland), Tyler Nicholas Haig und Kristina Koch (beide aus den USA) sowie die neuen drei Astronauten vom Start im Juli auf der ISS auf FEDOR-Roboter.
Der FEDOR-Astronaut wird auf drei Arten gesteuert: über Funk, Glasfaser oder ein gewöhnliches Elektrokabel.
Nicht nur Astronauten an Bord der ISS können den Roboter steuern, sondern auch technische Spezialisten auf der Erde, die über einen externen Kommunikationskanal eine Verbindung zum Roboter herstellen und einen speziellen Kontrollanzug mit 3D-Brille verwenden, um die Situation mit den Augen des Roboters zu sehen.
Es ist sehr interessant, welche wissenschaftlichen Aufgaben und Experimente auf der ISS mit dem FEDOR-Roboter geplant sind und durchgeführt werden.
Obwohl bereits im Jahr 2016 festgelegt wurde, dass der FEDOR-Roboter in den Weltraum gehen, Wartungsarbeiten und andere geplante Arbeiten durchführen kann.
Nach Abschluss zusätzlicher Tests zur elektromagnetischen Verträglichkeit des Roboters auf der ISS wird der Kommunikationskanal getestet und der FEDOR-Kosmonaut führt eine Reihe von Befehlen aus, die von der Erde kommen.
