
Ein autonom fliegender drahtloser kleiner Roboterwürfel "Bumble" des Astrobee-Projekts begann an Bord der ISS Flugtests zu unterziehen.
2019 ist das Jahr der Roboter auf der ISS. FEDOR ist noch nicht angekommen, aber die Kampftests der Roboter des Astrobee-Projekts haben bereits begonnen.

Zwei Roboter sind bereits auf der Station - dies sind Bumble and Honey, und im Juli wird der dritte Roboter, Queen, voraussichtlich auf der ISS eintreffen.

Ihre Namen sind nicht so leicht mit Miniatur zu assoziieren und haben eine "Bienen" -Disposition.
Hierbei handelt es sich um kleine autonome Serviceroboter, die speziell für die Schwerelosigkeit in den ISS-Modulen entwickelt wurden, die von der
NASA im Ames-Forschungszentrum entwickelt und hergestellt wurden. Sie sollten wie Bienen sein, die einen Teil der routinemäßigen Weltraumaufgaben übernehmen und die ISS-Besatzung von einfachen, aber häufigen Aktionen befreien.
Das Astrobee-Projekt ist daher ein frei fliegendes System eines Roboterkomplexes, dessen Hauptzweck darin besteht, kleine automatisierte Plattformen unter Schwerelosigkeitsbedingungen zu testen, Daten unter realen Bedingungen zu empfangen und zu analysieren und die Software und Funktionen von Robotern weiter zu aktualisieren und zu verbessern, um aktuelle und neue Aufgaben auszuführen auf der ISS.

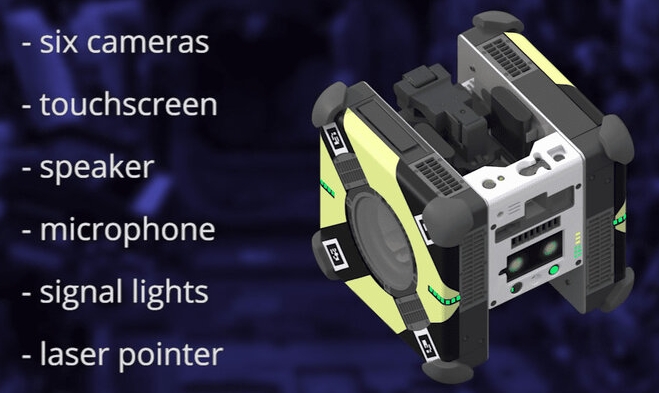
 Eigenschaften der Roboter des Astrobee-Projekts:
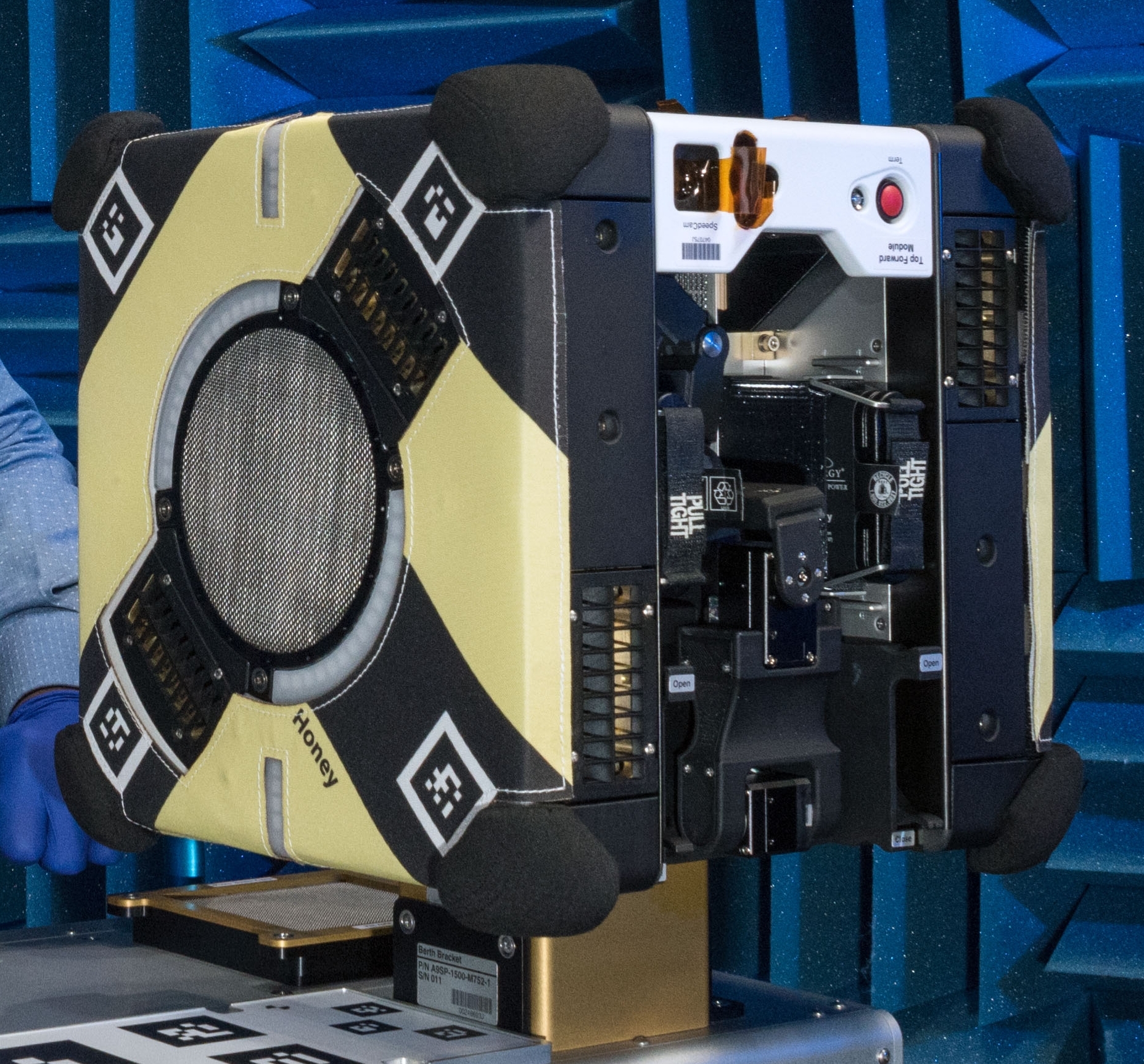
Eigenschaften der Roboter des Astrobee-Projekts:- Die Größe eines Roboters beträgt 30 x 30 x 30 Zentimeter (1 x 1 x 1 Fuß).
- Der Körper des Roboters ist mit weichem Material bedeckt, um mögliche Schäden zu minimieren, wenn er auf ein Objekt oder Element auf der ISS trifft.
- Ein Teil der Flächen des Roboters ist für die Arbeit mit kleinen Lasten ausgelegt. Es gibt sogar ein System zum Erfassen und Befestigen von Objekten mit einem Faltmanipulator, sodass der Roboter ein Objekt halten und sicher von einem Ende der Station zum anderen bewegen kann. Mithilfe dieser Erfassung kann der Roboter seine Position festlegen, wenn notwendig, Handläufe oder andere Elemente der ISS zu fangen;

- Roboter haben eine separate externe Ladestation, die zum Laden der Roboterbatterien und zum Aufnehmen von Telemetriedaten dient.

- Roboter können sich innerhalb der ISS nur unter Schwerelosigkeitsbedingungen bewegen, wenn sich im Arbeitsmodul mit dem Roboter eine Atmosphäre befindet. Ihr reaktives System nutzt die Luft der Station, um sich zu bewegen.
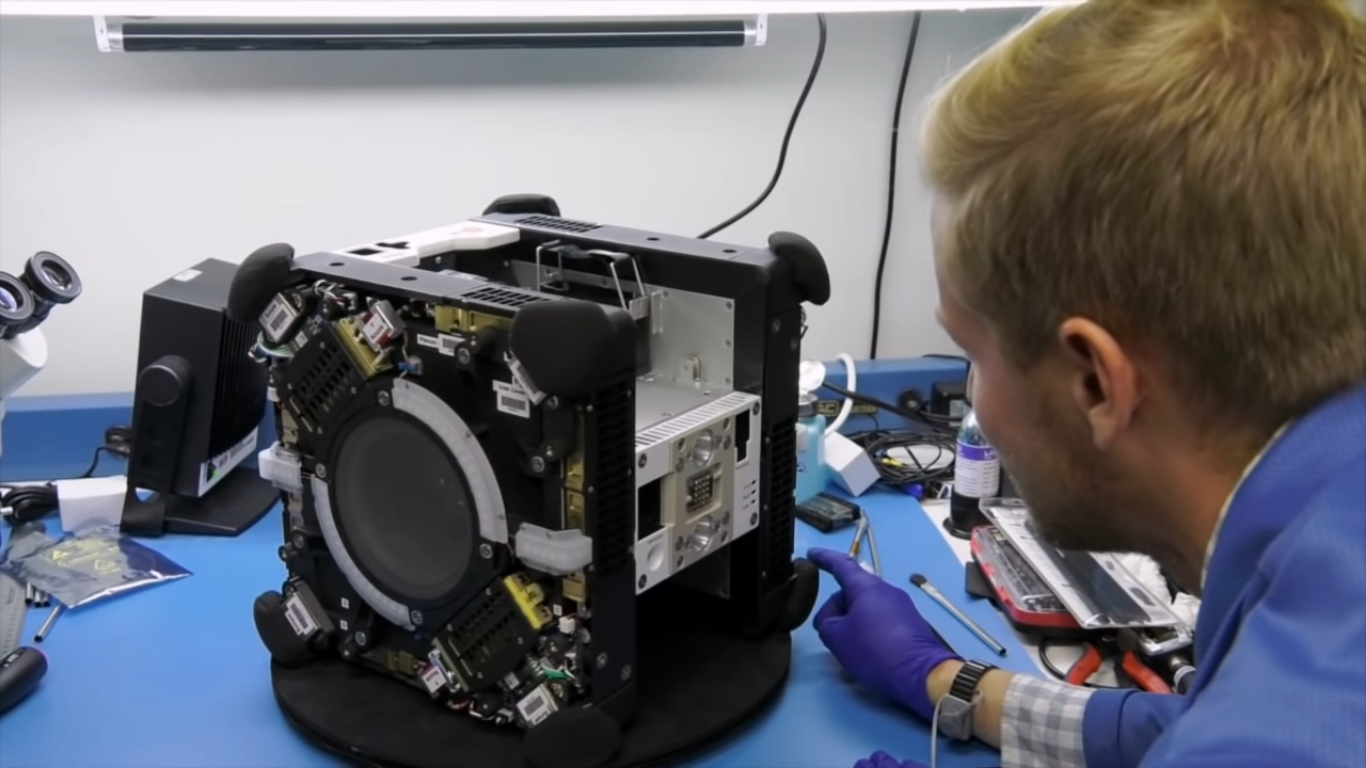
- Jeder Roboter verfügt über ein eigenes Computersteuerungssystem für das integrierte Lüftersystem, mit dem Sie Luft durch 12 Düsen in entgegengesetzter Richtung zum beabsichtigten Bewegungsvektor erfassen und ablassen können. Dadurch kann sich der Roboter in jede Richtung bewegen und in der Schwerelosigkeit frei um die ISS fliegen.
- Die Roboterventilatoren befinden sich hinter einer speziellen Schutzwand an den Seiten des Würfels.
- Das Computersystem des Roboters läuft unter Linux, und das Modul, das für das Arbeiten und Verschieben von Objekten verantwortlich ist, arbeitet auf der Basis von Android, sodass Sie die Funktionalität des Systems bei Bedarf schnell erweitern können.
-
Link zum Github-Repository mit der Astrobee-Projektsoftware.
- Jeder Roboter hat an Bord: Die Hauptnavigationskamera mit einem Sichtfeld von 116 °, mehrere HD-Kameras mit Autofokus, die in Echtzeit Informationen von der ISS zur Erde übertragen können, und die integrierte CamBoard Pico Flexx-Kamera ermöglichen dem Roboter das Erkennen von Objekten und Hindernisse aus einer Entfernung von vier Metern;
-
Jeder Roboter verfügt über einen optischen Detektor zur Bestimmung der Geschwindigkeit und des Not-Aus-Verfahrens.
- Betriebsarten von Robotern: Autonom, sie können auch ferngesteuert, sicher aufgenommen, bei Bedarf aufgeladen und ausgeschaltet werden.
 Funktionen von Robotern des Astrobee-Projekts:
Funktionen von Robotern des Astrobee-Projekts:- Die Hauptaufgabe von Robotern besteht darin, der Besatzung auf der ISS zu helfen, eine Reihe von Routineaufgaben auszuführen, damit sich das Personal auf wichtigere Aufgaben konzentrieren kann (Durchführung von Experimenten und verschiedenen Studien).
- eine Bestandsaufnahme durchführen, Experimente dokumentieren, die ISS-Systeme überprüfen und Lasten, Gegenstände und Werkzeuge durch die engen Korridore der Station und zwischen den Modulen bewegen;

- Wartung der ISS-Module durchführen, wenn sich kein Personal in ihnen befindet oder an Orten, an denen die Besatzung nicht schnell erreichen kann;
- Überwachung des Betriebs der ISS-Systeme und -Sensoren;
- Überwachung der Luftqualität, Analyse der Kohlendioxidkonzentration an verschiedenen Orten der ISS so oft wie erforderlich.
 Die Geschichte des Auftretens von Robotern des Astrobee-Projekts auf der ISS:
Die Geschichte des Auftretens von Robotern des Astrobee-Projekts auf der ISS:- Die Ladestation wurde am 17. November 2018 an Bord der ISS geliefert und am 15. Februar 2019 installiert.


ABB Leistungsschalter wird verwendet:

- Hummel- und Honigroboter wurden am 17. April 2019 von der Erde zur ISS gestartet.

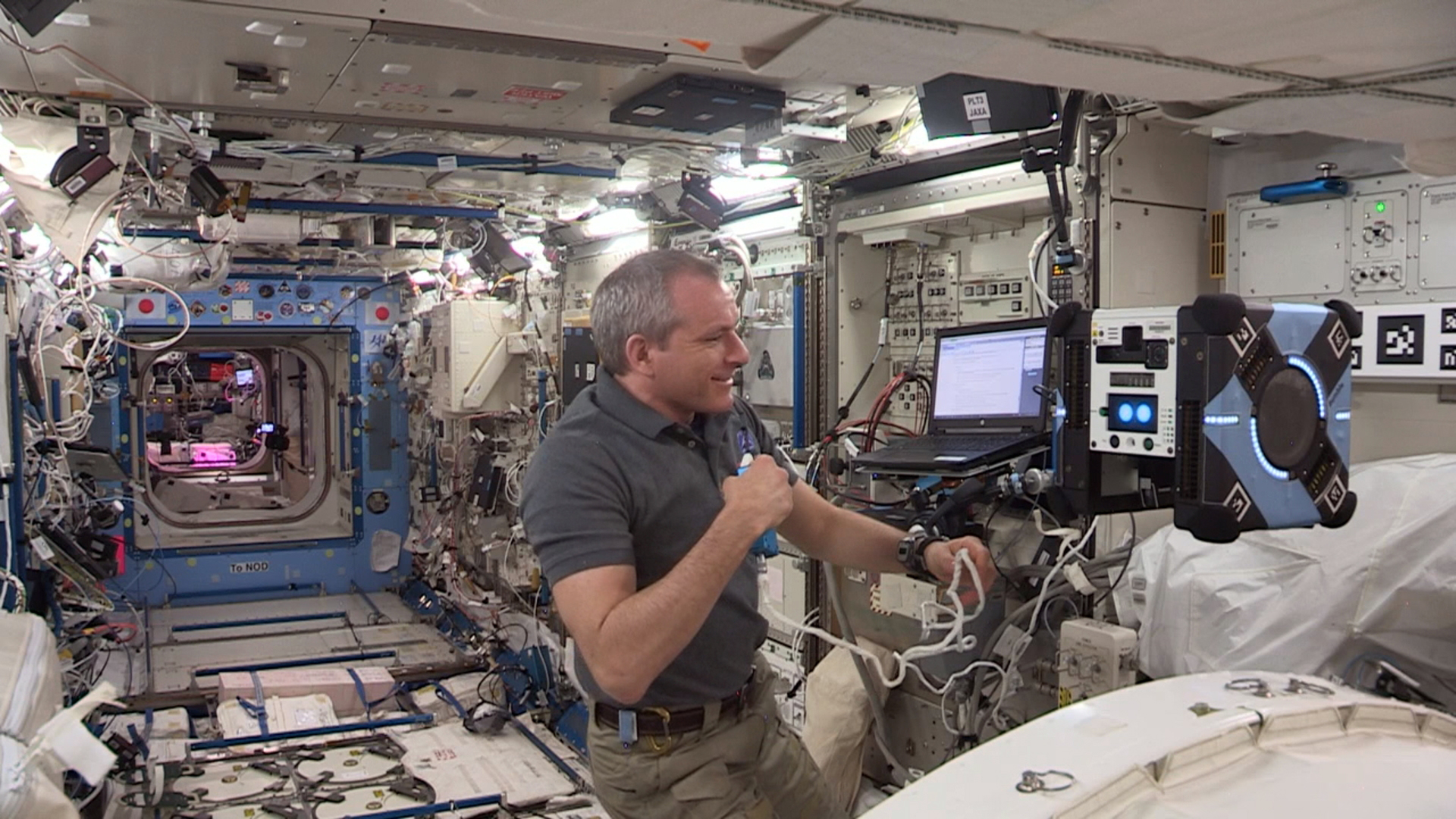
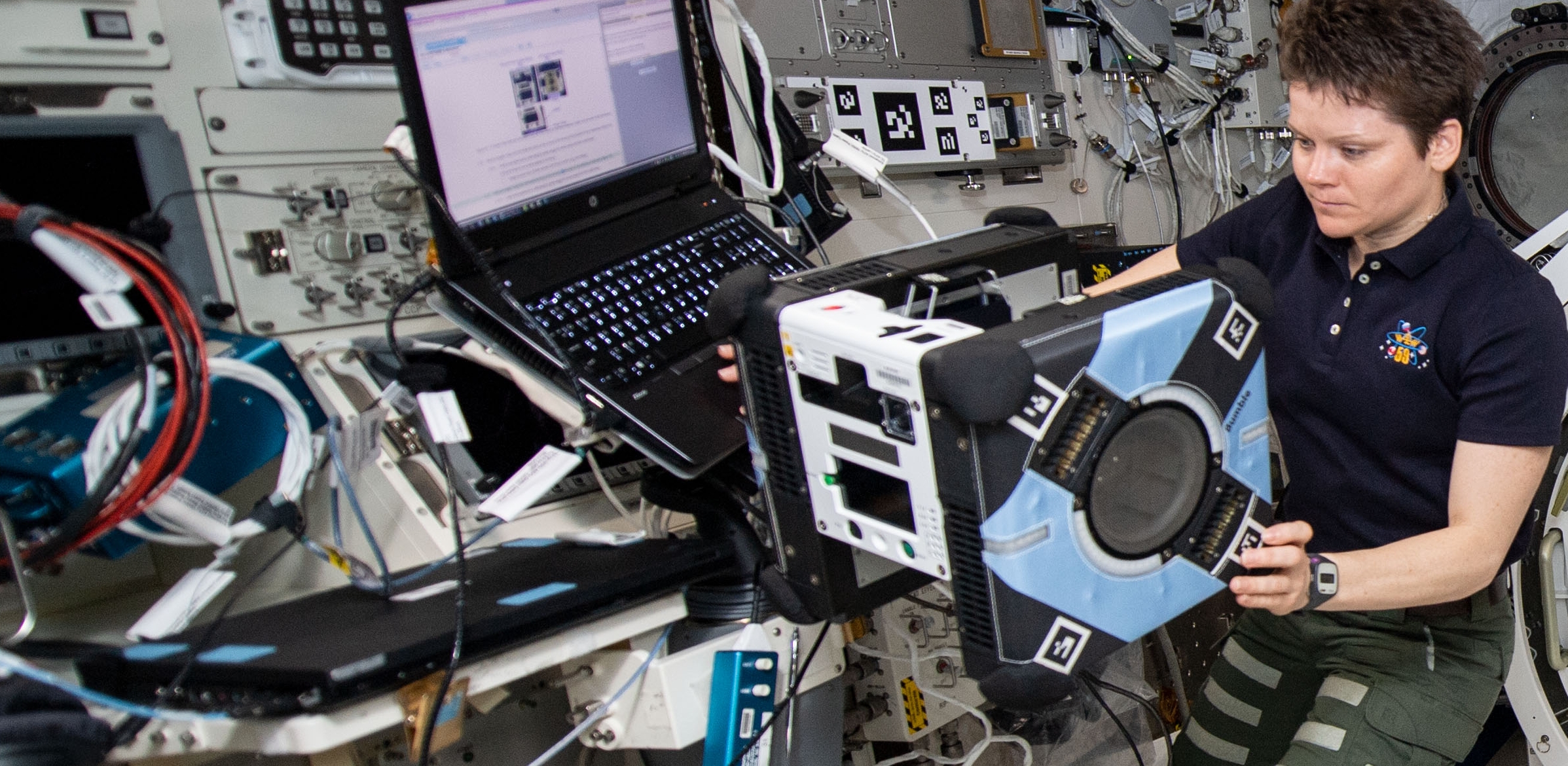
- Am 30. April 2019 packte Ann McClain (ISS-Astronautin) eine Schachtel mit dem Bumble-Roboter aus und testete mit Unterstützung des NASA-Entwicklungsteams des Astrobee-Projekts im Ames Research Center alle Hilfssysteme des Roboters - Avionik, Videokameras, Antriebssysteme und Datenübertragung und Laden der Batterien;





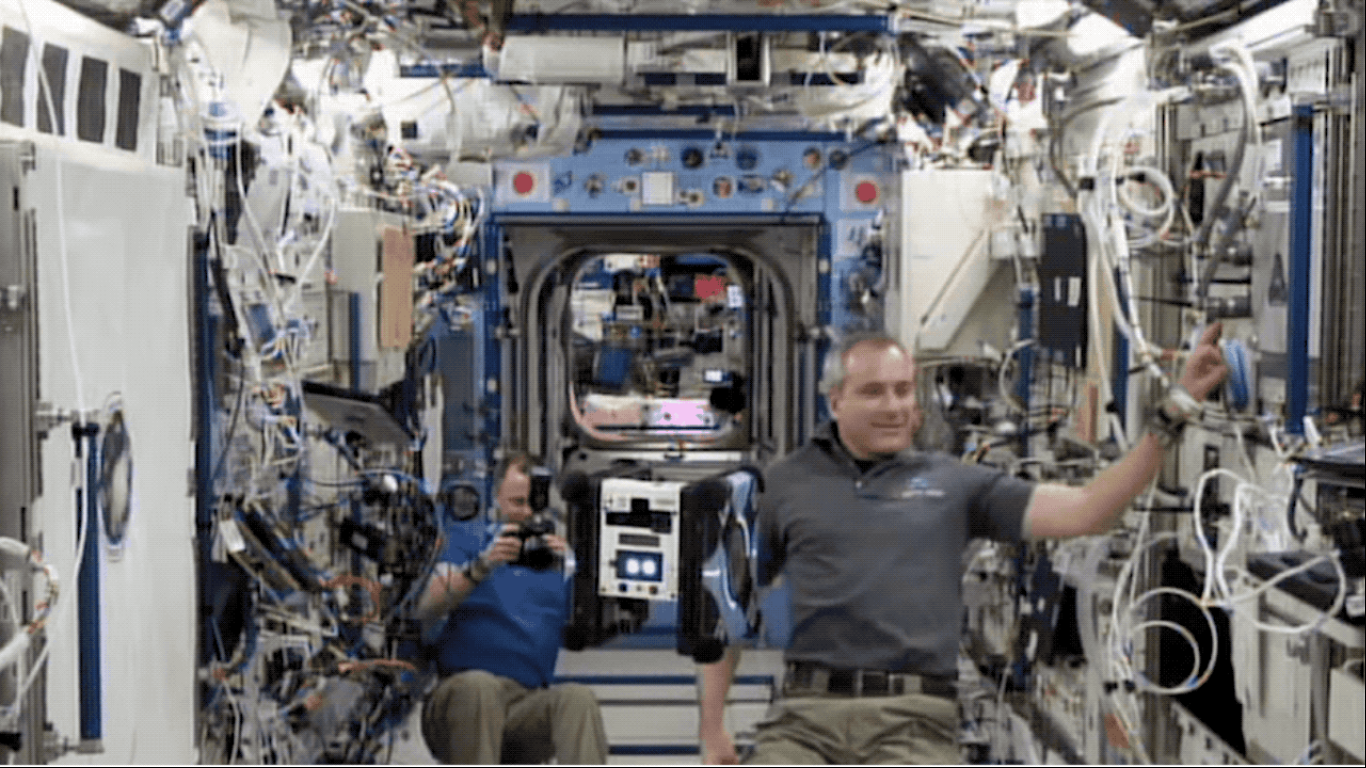
- Am 14. Juni 2019 begannen die Flugtests mit dem Bumble-Roboter.
- Juli 2019 - Der dritte Queen-Roboter wird voraussichtlich auf der ISS eintreffen.
Über den
ersten Flug des Astrobee
Bumble-Roboters auf der ISS:
Am 14. Juni 2019 wurde der Bumble-Roboter der erste Roboter des Astrobee-Projekts, das den ersten Testflug in Schwerelosigkeit durchführte.
Vor dem ersten Flug des Bumble-Roboters überprüfte das Astrobee-Projektteam des Ames Research Center alle Bordsysteme aus der Ferne, erhielt von der Erde die Bestätigung, dass der Roboter seinen Standort identifizieren kann und bereit ist, innerhalb der ISS zu navigieren.
Der Astronaut der kanadischen Weltraumbehörde, David Saint-Jacques, leistete praktische Unterstützung bei Preflight-Tests, indem er den Bumble-Roboter manuell im ISS-Wissenschaftslabor im Kibo-Modul bewegte, damit das Roboternavigationssystem nachträglich in der neuen Umgebung kalibrieren konnte.
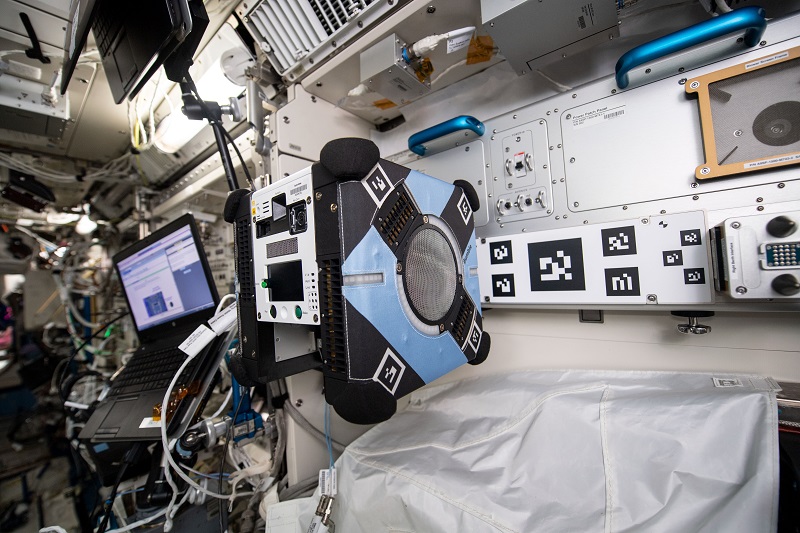
Das Navigationssystem des Bumble-Roboters verwendet Vollzeitkameras zur Überwachung und Überwachung des Außenraums und vergleicht dann die empfangenen Bilder mit der zuvor in den Roboter geladenen ISS-Innenkarte.

Die Roboter des Astrobe-Projekts sind so konzipiert, dass sie sich in jede Richtung bewegen und sich an Bord der ISS im Weltraum um ihre Achsen drehen.
Als nächstes begannen Tests zum Betrieb der Flugsysteme des Bumble-Roboters im automatischen Modus und im gesteuerten Modus (von der Erde entfernt).
Während des ersten Testfluges des Bumble-Roboters wurde die Funktion seiner Hauptkomponenten an Bord überprüft und ein Komplex grundlegender Bewegungen ausgeführt, z. B. "30 Zentimeter vorwärts fliegen" oder "45 Grad nach rechts drehen", Ausrichtung im Raum ISS und so weiter.

Die NASA plant, die Flugfähigkeiten des Bumble-Roboters mit einer Reihe immer komplexer werdender Manöver weiter zu testen, um festzustellen, wie gut seine Elemente in der Schwerelosigkeit funktionieren und welche Anpassungen an der Software für die weitere Verwendung vorgenommen werden müssen.
Basierend auf den Ergebnissen des Komplexes dieser Flugtests werden Grundeinstellungen für das Antriebssystem von Robotern des Astrobe-Projektprojekts erstellt, mit deren Hilfe die Bumble-, Honey- und Queen-Roboter bei der Vorbereitung auf die Rolle neuer ISS-Besatzungsmitglieder unterstützt werden sollen.
Der erste Flug des Roboters "Bumble" 
