Eine der schwersten technologischen Katastrophen in der Geschichte der Menschheit ereignete sich am 26. April 1986. Und dann wiederholte es sich fast am 12. März 2011. Wie Sie vielleicht vermutet haben, handelt es sich um Unfälle im Kernkraftwerk Tschernobyl in der UdSSR und im Kernkraftwerk Fukushima-1 in Japan. Die von HBO gedrehte Serie "Tschernobyl" weckte erneut das Interesse an der Geschichte des Tschernobyl-Unfalls und erinnerte daran, wie schwierig es war, die Freisetzung von Radionukliden aus dem zerstörten Reaktor in die Atmosphäre zu stoppen. Unabhängig davon sprachen sie über den erfolglosen Einsatz von Robotern und den erzwungenen Einsatz von Menschen als Hilfe. Japan führt zahlreiche Experimente mit einer Vielzahl von Robotern durch, die die Notwendigkeit verzögern können, Menschen zur Ausrottung zu bewegen.
Die Unfälle im Kernkraftwerk Tschernobyl und in Fukushima haben unterschiedliche Ursachen und eine unterschiedliche Chronik der Ereignisse, aber eines haben sie gemeinsam: Das weite Gebiet um die Stationen ist infiziert, was einen langfristigen sicheren Aufenthalt unmöglich macht, und es besteht keine Frage einer vollständigen Räumung der Kraftwerke der Stationen. In beiden Fällen war die Menschheit nicht bereit, die Folgen zu beseitigen - Hunderttausende Menschen in der UdSSR arbeiteten an der Dekontamination der Sperrzone und dem Bau eines Schutzsarkophags über dem Reaktor. In Japan gingen sie den anderen Weg.
Referenz: Expositionsstandards
Der Satz über den Strahlungshintergrund aus der Tschernobyl-Reihe hat sich im fremden Internet zu einem Mem entwickelt: "3.6 Röntgenstrahlen sind nichts Gutes, aber nicht schrecklich." Lohnt es sich, Angst vor denselben 3,6 Röntgenstrahlen pro Stunde zu haben, oder ist dies wirklich kein schrecklicher Hintergrund? Um die im folgenden Beitrag angegebenen Messungen von Fukushima besser zu verstehen, müssen Sie zuerst die Dosierungsskala und ihre Auswirkungen auf den Körper verstehen.
Röntgen (P), das den Russen bekannt ist, ist eine veraltete Maßeinheit für den Strahlungshintergrund, die nicht im SI-System enthalten ist. Jetzt wird stattdessen Sievert (Sv) verwendet. Einfach ausgedrückt entspricht 1 Sv 100 R. Das heißt, 3,6 R / h sind 0,036 Sv / h oder 36 mSv / h. In Russland sehen Sie an einigen Forschungsinstituten ein Panel mit dem aktuellen Hintergrund, gemessen in Röntgenstrahlen. Im Durchschnitt schwankt der städtische Hintergrund in unserem Land zwischen 12 und 20 μR / h oder zwischen 0,12 und 0,2 μSv / h. Eine Person erhält eine Dosis von etwa 2,4 mSv pro Jahr aus dem natürlichen Strahlungshintergrund unseres Planeten (abhängig von Land und Höhe). Diese Strahlung kommt aus dem Weltraum, kommt aus dem Boden, Wasser, ist dank Radongas in der Luft vorhanden.
Und jetzt eine kleine Tabelle mit den Dosen, die wir während unseres gesamten Lebens erhalten (die unten angegebene Einzelexposition ist der Erhalt der geeigneten Dosis für bis zu 4 Tage):


Kehren wir zu den in der Serie erwähnten 3,6 U / h zurück. 0,036 Sv / h (36 mSv / h) ist im Falle eines Unfalls kein schrecklicher Hintergrund. Für die Entwicklung einer leichten Strahlenkrankheit ist es notwendig, länger als einen Tag in der Gefahrenzone zu bleiben, und Reparaturarbeiten für mehrere Stunden sind ziemlich sicher und akzeptabel. Und jetzt erinnern wir uns, wie wenig später sie in der Serie sagten, dass der Hintergrund am Reaktor nicht 3,6, sondern 15.000 Röntgenstrahlen (150 Sv / h) beträgt. Vier Minuten mit einem solchen Hintergrund bedeuten den unvermeidlichen Tod. Nach zwei Minuten kann nur die am schnellsten qualifizierte medizinische Versorgung eine Chance auf Erlösung geben, und 25 Sekunden reichen aus, um an Strahlenkrankheit zu erkranken.
Toshiba in Fukushima
Die Partnerschaft zwischen Toshiba und der Tokyo Energy Company (TEPCO) begann bereits in der Bauphase des Kernkraftwerks Fukushima-1. Toshiba war für den Bau von Reaktoren vom Typ BWR für das dritte bzw. fünfte Aggregat verantwortlich, die 1976 bzw. 1978 in Betrieb genommen wurden. Zu den Vorteilen von BWR-Reaktoren zählen ein niedrigerer Dampfdruck im Primärkreis als beispielsweise der sowjetische VVER und niedrigere Betriebstemperaturen. Zu den Nachteilen gehören die Komplexität der Herstellung, die Notwendigkeit eines sehr großen Gehäuses, die Komplexität der Steuerung und Radiolyse in Brennelementen, die die Erzeugung von explosivem Wasserstoff zur Folge hat.
Wenn der Unfall im Kernkraftwerk Tschernobyl auf die mangelnde Auslegung des RBMK-Reaktors zurückzuführen war, die sich während der Verstöße während der Tests bemerkbar machte, führten zwei Naturkatastrophen zum Vorfall in Fukushima. Ein Erdbeben mit einer Rekordstärke von 9,0 bis 9,1 führte zum Abschalten der Reaktoren, und der darauf folgende Tsunami überschwemmte das Gebiet von Fukushima-1 und Notstromaggregate, die die Reaktorkühlpumpen versorgten. Die Reaktoren der Station, die selbst im Falle eines Notstopps nicht sofort abkühlen, blieben ohne Einströmen von kaltem Wasser, wodurch es abkochte, den Dampfdruck und die Temperatur im Inneren erhöhte, Wasserstoff durch den Kontakt von Zirkoniumdampf in den Brennelementen (Dampf-Zirkonium-Reaktion) und dessen anschließende Explosion erzeugte . Im ersten, zweiten und dritten Aggregat schmolz der Reaktorkern und Kernbrennstoff trat aus. In Fukushima fließen Radionuklide zusammen mit Kühlwasser in den Ozean. Im Kernkraftwerk Tschernobyl gelangten sie während eines Brandes in die Atmosphäre und verbreiteten sich in ganz Europa.
 Chronik dessen, was bei drei Aggregaten passiert ist. Das vierte Aggregat war ebenfalls betroffen, aber es gab keinen Kernbrennstoff in seinem Reaktor, so dass es nur ein Feuer gab. Quelle: Roulex_45 / Wikimedia
Chronik dessen, was bei drei Aggregaten passiert ist. Das vierte Aggregat war ebenfalls betroffen, aber es gab keinen Kernbrennstoff in seinem Reaktor, so dass es nur ein Feuer gab. Quelle: Roulex_45 / Wikimedia
Um den Fukushima-Unfall zu beseitigen, ist es notwendig, eine Schadenskarte zu erstellen, geschmolzenen Brennstoff und seine Leckstellen zu finden, abgebrannten Kernbrennstoff aus Reaktoren zu entfernen und Pools zu halten, die Trümmer zu zerlegen - das heißt, enorme Arbeit unter einem ebenso kolossalen Strahlungshintergrund auszuführen. Jetzt wird diese Arbeit auf der FAES von Robotern und ferngesteuerten Autos erledigt - das Versenden von Personen in die Unfallzone ist zu gefährlich. An einigen Stellen der Station kann der Hintergrund eine Person in nur wenigen Minuten töten.
Toshiba entwickelt zusammen mit dem Internationalen Forschungsinstitut für die Stilllegung von Kernreaktoren (IRID) Roboter für bestimmte Aufgaben - Inspektion von Fukushima-Kraftwerken und Dekontamination (Reinigung) von Räumen von radioaktiver Kontamination. Wir werden über einige der bemerkenswertesten Toshiba-Roboter sprechen, die ihren kleinen, aber wichtigen Beitrag zur Unfallursache geleistet haben.
Übrigens gibt es eine falsche Meinung, dass die Liquidation von Fukushima die wertvollen Erfahrungen von Tschernobyl nicht berücksichtigt hat. Das ist grundsätzlich falsch. Unmittelbar nach dem Unfall wurde eine Gruppe japanisch-russischer Experten auf dem Gebiet der Kernenergie gebildet, die sich mit den Folgen des Unfalls von Fukushima-1 befasste, darunter Larion Aleksandrovich Lebedev, seit Sommer 1986 direkter Teilnehmer am Kernkraftwerk Tschernobyl, der Mitglied des Moskauer Instituts für technische Physik war und einen großen Beitrag leistete bei der Untersuchung der Strahlenbedingungen und des Aufbaus des Sarkophags. Nach dem Unfall in Japan verbesserte Larion Lebedev die Technologie zur Trennung von Tritium von radioaktivem Wasser, wodurch wir die riesigen Mengen an schwerem Wasser reinigen konnten, die nach dem Abkühlen der zerstörten Reaktoren übrig geblieben waren. Im Auftrag der japanischen Regierung wurde Larion Alexandrovich der Orden der aufgehenden Sonne verliehen, der für militärische und zivile Verdienste verliehen wurde.
Vierbeiniger Scout
Der erste Toshiba-Roboter, der in die FAES eintrat, war die namenlose vierbeinige Drohne, deren Entwicklung unmittelbar nach dem Unfall begann. Seine Mission war, wie alle Roboter, die in den Anfangsjahren im Kraftwerk gestartet wurden, die Strahlungsaufklärung und Schadensbewertung in Triebwerken.
Ein Dosimeter und sechs Kameras wurden am Chassis installiert, um das Gelände der Station zu inspizieren. Geschützte Elektronik wurde für den Betrieb mit einer Strahlung von 100 mSv / h für ein Jahr (mit einem 10-Stunden-Arbeitstag) und mit einem viel größeren Hintergrund für kurze Zeiträume entwickelt. Eine Batterieladung reichte zwar nur für 2 Stunden autonomer Existenz. Der Roboter bewegte sich mit einer Geschwindigkeit von ca. 1 km / h, was bei der Untersuchung eines zerstörten Aggregats ausreicht. Das Management wurde im Falle einer Störung redundant über Funk durchgeführt.
Am unteren Ende des Geräts war eine kleine Aufklärungsdrohne angebracht, die sich von ihrem Träger lösen und an enge Stellen kriechen konnte, an denen ein großer Roboter nicht durchkommen konnte. Es sollte verwendet werden, um nach Leckagen von Kühlwasser unter den Rohrleitungen des Reaktors zu suchen.
Dies bedeutet nicht, dass große Hoffnungen auf den Roboter gesetzt wurden: Bereits in der Phase der Demonstration wiesen die Journalisten auf die Langsamkeit der Maschine hin - es dauerte bis zu einer Minute, um jeden Schritt der Leiter zu erklimmen, und wenn der Fuß auf eine instabile Oberfläche gestellt wurde, konnte der Roboter auf die Seite rollen.
Der erste experimentelle Toshiba-Mechanismus für die FAES gelang es jedoch immer noch, in das Gebäude des zweiten Triebwerks einzudringen und eine kleine Aufklärung durchzuführen. TEPCO veröffentlichte am 11. Dezember 2012 einen Bericht. Der Roboter machte Fotos von einem der Rohre und bestätigte das Fehlen von Lecks. Im März 2013 ging er noch fünf Mal hinein. Doch bald verlor der Roboter beim Versuch, die Räumlichkeiten weiter zu inspizieren, das Gleichgewicht auf der Treppe und fiel auf die Seite. Aufgrund des Fehlens eines Drehmechanismus blieb der vierbeinige Späher im zweiten Block liegen.
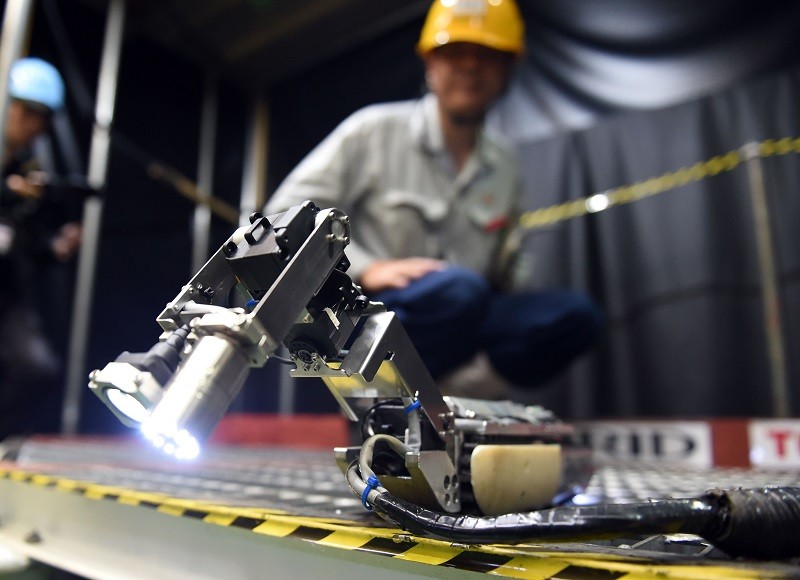
Faltbarer Explorer Scorpion
Der nächste Roboter des Unternehmens, der alle Mängel des Vorgängermodells berücksichtigte, war der nach seiner Form benannte Toshiba Scorpion (Titelfoto). Es wurde für eine sehr schwierige Aufgabe entwickelt - den Boden des Reaktors zu untersuchen und nach Brennstäben zu suchen. Diese Mission beinhaltet die Arbeit mit einem riesigen Strahlungshintergrund. Scorpion blieb die Beine erspart, die durch Schienen ersetzt wurden, und aus Gründen der Kompaktheit klappte das Design - das Auto sollte durch die Durchgänge zum Laden von Brennstäben in den Reaktor geworfen werden. In der Betriebsart hebt der Roboter seinen Heckmanipulator an und bewegt sich wie ein Skorpion entlang drei Achsen, an deren Ende anstelle des Stichs eine Kamera und LEDs für die Hintergrundbeleuchtung angebracht sind. Eine weitere Kamera ist vorne montiert und schaut immer nach vorne.
Scorpion wird vom Bediener über ein Kabel gesteuert, sodass keine Probleme mit der Strom- und Signalübertragung auftreten. Außerdem wird der Roboter wiederverwendbar gemacht, er sollte nach Übermittlung des Zeugnisses nicht im Reaktor verbleiben. Wenn Sie ihm ein Trinkgeld geben, haben Sie keine Angst, der „Schwanz“ mit der Kamera bringt den Roboter in seine normale Position zurück.
Für mehrere Jahre wurde Scorpion fertiggestellt, um endlich in die FAES einzudringen - im Laufe der Zeit erhielt er einen kleinen Wasserwerfer, um den Weg freizumachen, einen Eimer und einen Cutter für die Arbeit mit Corium. Im Februar 2017 ging der Roboter zum Reaktor, wo er den Hintergrund maß und ein Video drehte. Das Dosimeter zeigte beeindruckende 210 Sv / h (21.000 R). Im nächsten Raum, in dem Arbeiter den Roboter in das Rohr luden, betrug der Hintergrund 6 mSv / h.
ROV: kleines U-Boot
 Ein kleines U-Boot mit Videokameras, die hohe Erwartungen haben. Quelle: Toshiba
Ein kleines U-Boot mit Videokameras, die hohe Erwartungen haben. Quelle: Toshiba
Ein ferngesteuertes Unterwasserwerkzeug, kurz ROV, ist der erste schwimmende Roboter von Toshiba, der zur Untersuchung des Reaktors des dritten Aggregats gebaut wurde, dessen unterer Teil unter einer sechs Meter langen Wassersäule verborgen ist. Dieses kleine U-Boot mit Abmessungen von 30 x 13 cm und einem Gewicht von 2 kg trägt zwei Kameras und eine Hintergrundbeleuchtung, wird per Kabel gesteuert und kann sich mit hoher Genauigkeit unter Wasser in jede Richtung bewegen. Das Gerät wird vom Bediener gesteuert und das Signal und die Stromversorgung erfolgen über ein langes Kabel. Um zu verhindern, dass sich der Draht verheddert und an Schmutz haftet, hat Toshiba eine spezielle Beschichtung mit minimaler Reibung entwickelt. Am ROV selbst wurden zwei leistungsstarke Motoren installiert, damit der Roboter das Kabel problemlos mitziehen kann.
Der ROV-Durchmesser von 14 cm war übrigens auf einen engen Einlass im Reaktorbehälter des dritten Aggregats zurückzuführen, sodass die Ingenieure von Toshiba hart arbeiten mussten, um Elektronik, Schutz und Motoren in ein so kompaktes Gehäuse einzubauen. Am Ende eines zweimonatigen Intensivkurses für Bediener ging Toshiba ROV zur FAES. Der Roboter besuchte den Reaktor am 19., 21. und 22. Juli 2017 und inspizierte erfolgreich die zerstörten Eingeweide.
Magnetisches SC-ROV
Ein anderer unzugänglicher Ort, an dem sich Wasser mit Radionukliden ansammelte, waren toroidale Druckentlastungskammern, die sich unterhalb des Reaktors befanden. Es war notwendig, einen Roboter zu schicken, um nach Lecks unter der Kamera zu suchen, aber die Angelegenheit wurde durch die Tatsache erschwert, dass der Sicherheitsbehälter überflutet war - der Roboter musste Rohre inspizieren, die in schlammiges Wasser getaucht waren. Schwimmende Geräte waren dafür nicht geeignet, es wurde eine Sonde benötigt, die am Rohr befestigt war und sich entlang dieses bewegen konnte, ohne auch in einem großen Winkel zu gleiten.
Wie befestige ich den Roboter an einem Stahlrohr, damit er nicht rollt? Mit Hilfe von Magneten. Das SC-ROV von Toshiba wurde speziell für die Druckentlastungskammer entwickelt. Es ist ein Chassis mit Rädern aus leistungsstarken Neodym-Magneten. Mit vier Kameras und einem Marker kann sich der Bediener entlang der Oberfläche eines unter Wasser getauchten Rohrs bewegen und die gefundenen Löcher markieren.
 Während der Demonstration hielt SC-ROV die Magnete perfekt an der geneigten Oberfläche. Aber die realen Bedingungen waren viel schwieriger. Quelle: IRID
Während der Demonstration hielt SC-ROV die Magnete perfekt an der geneigten Oberfläche. Aber die realen Bedingungen waren viel schwieriger. Quelle: IRID
Nach den Ergebnissen von SC-ROV im Jahr 2014 wurden keine Lecks gefunden, es wurden jedoch Probleme beim Betrieb des Geräts festgestellt. Erstens überschritt der Sichtbereich aufgrund der Trübung des Wassers 30-35 cm nicht, was die Suche erheblich verlangsamte. Zweitens rutschte der Roboter aufgrund einiger Defekte in der Oberfläche des Rohrs dennoch aus, wenn er auf 120 ° geneigt war.
Corium-Suchkamera
Frühere Suchmissionen haben ein bedrückendes Bild gezeigt - der Kernbrennstoff im Reaktor des zweiten Triebwerks ist über das Reaktorgefäß hinausgegangen. Die Fotos des geschmolzenen Rosts am Boden des Sicherheitsbehälters machten deutlich, dass sich der Kraftstoff bereits irgendwo am Boden befand. Aber hat das Containment es zurückgehalten oder ist das Corium in den Boden gesunken? Es war notwendig, einen neuen Roboter in die "Hölle" des ehemaligen Reaktors zu schicken, um den Brennstoff unglaublich zu verblassen.
 Der geschmolzene Rost im Sicherheitsbehälter des zweiten Reaktors befindet sich genau über dem Antrieb der Steuer- und Schutzsystemstangen. Quelle: TEPCO
Der geschmolzene Rost im Sicherheitsbehälter des zweiten Reaktors befindet sich genau über dem Antrieb der Steuer- und Schutzsystemstangen. Quelle: TEPCO
Raupenroboter arbeiten nur auf flachem Boden, und ein U-Boot benötigt eine Wasserdicke. Toshiba entwickelte eine Telekontrollkamera, die am Ende eines fünf Meter langen Teleskoprohrs angebracht war. Unabhängig vom Eintrittswinkel des Rohrs in das Sicherheitsbehälter nimmt die Kamera eine streng vertikale Position ein - die Haupteinheit wird von einem Steuerkabel gehalten, dh die Kamera scheint "am Draht zu hängen". Das Objektiv dreht sich horizontal um 360 ° und vertikal um 120 °. Tatsächlich befinden sich zwei Kameras gleichzeitig auf dem Gerät - direkt arbeitend und eine Kamera zur Orientierung. Zusätzlich zu den Linsen sind am Gerät eine Hintergrundbeleuchtung, ein Dosimeter und ein Thermometer installiert. Das Gerät hält der absorbierten Dosis von bis zu 1000 Grau stand.
Die erste Version der Kamera arbeitete im Januar 2018 in Fukushima, wo sie das Corium erfolgreich fand und den Hintergrund mit 530 Sv / h (53.000 Röntgenstrahlen) maß. Aber die Arbeit endete nicht dort - es mussten Proben zur Analyse entnommen werden. In der aktualisierten Version des Geräts wurde die Hintergrundbeleuchtung verbessert und ein Schiebearm hinzugefügt. Im Februar 2019 erhielt die ferngesteuerte Kamera von Toshiba erstmals eine Coriumprobe vom zweiten Netzteil.
Reinigungsmaschine
Die Räumlichkeiten von Kraftwerken müssen früher oder später deaktiviert werden, aber zuerst müssen Sie eine Karte der Verschmutzung erstellen. Die Ergebnisse zahlreicher Forschungsmissionen zeigten ein sehr düsteres Bild: Entgegen den Erwartungen siedelten sich die meisten Radionuklide nicht am Boden oder an den Wänden an, sondern an den Elementen der oberen Ebene wie Rohrleitungen und Lüftung - sie machten bis zu 70% der gesamten Strahlung aus. Die Dekontamination des Bodens ist relativ einfach, die Wände sind etwas komplizierter, aber wie kommt man zum Schmutz an der Decke und in die Feinheiten von Rohren, wenn die Deckenhöhe im ersten Stock 7 bis 8 Meter beträgt?
 Toshiba Radionuklid "Reiniger" - steigt 8 Meter hoch und kratzt fleißig an den Wänden. Quelle: IRID
Toshiba Radionuklid "Reiniger" - steigt 8 Meter hoch und kratzt fleißig an den Wänden. Quelle: IRID
Toshiba hat einen Roboter entwickelt, der eine Kanone mit Trockeneis betreibt - Eispulver bedeckt die Oberfläche, bindet radioaktive Partikel und der Roboter kratzt sie und absorbiert sich selbst. Der Mechanismus hebt die Struktur auf eine Höhe von 8 Metern. Da es sich um eine andere ferngesteuerte Maschine handelt, empfängt der Bediener gleichzeitig ein Bild von 22 Kameras. Die Maschine begann im Januar 2016 mit der Reinigung von Aggregaten. Die Produktivität ist gering, aber auch ein kleiner Beitrag zur Dekontamination der Station ist wertvoll.
Hilfe aber keine Lösung
Seit dem Unfall im Kernkraftwerk Tschernobyl sind 33 Jahre vergangen, seitdem hat die Technologie einen enormen Durchbruch erzielt. Jetzt beteiligen sich Dutzende von Robotern und Arten von ferngesteuerten Baumaschinen an der Beseitigung der Folgen in Fukushima. Auf der TEPCO-Website wurden viele Berichte veröffentlicht, deren Daten insgesamt ein sehr trauriges Bild ergeben: Es gibt Roboter und Technologien, aber alle kamen der Wirksamkeit der Tschernobyl-Liquidatoren nicht nahe. Die Entwicklung und Erprobung von Robotern dauert Monate und Jahre. Das Ergebnis ihrer Arbeit ist ein Fortschritt um ein Dutzend Meter, die Erfassung dosimetrischer Daten, ein schlammiges Video und die häufige Beendigung von Missionen aufgrund unvorhergesehener Probleme.
Jeder Roboter in Fukushima ist ein gerettetes Volk, und jedes menschliche Leben ist es wert, sich an der Entwicklung von Robotern zu beteiligen. Die aktuellen Pläne von TEPCO machen jedoch deutlich, dass es nach vorsichtigen Schätzungen mindestens 30 bis 40 Jahre dauern wird, bis die Folgen des Unfalls behoben sind. Und dies bestätigt nur den Heldentum und das Ausmaß der Leistung der sowjetischen Liquidatoren von Tschernobyl.