In einem
früheren Artikel zum modellorientierten Design wurde gezeigt, dass nicht alle Techniken gleichermaßen nützlich sind. Und es erklärt, wie man es richtig macht, damit es nicht unerträglich schmerzhaft wird. Aber am Ende des Artikels wurde die Frage gestellt, provokativ, als Sharon Stone von den Ermittlern befragt wurde: Modellorientiertes Design ist sicherlich gut, aber wie kann man beweisen, dass das Modell zum Objekt passt? Was ist Ihr Beweis?
Eine allgemeine Antwort auf diese Frage wird noch vorbereitet, aber ich kann Ihnen derzeit ein echtes und frisches Beispiel für eine bestimmte geben. Wie immer zufällig stellte sich hier in meinen Händen der Text des führenden Spezialisten unseres Landes für Elektroantrieb Kalachev Yuri Nikolaevich heraus, Autor des Buches
Modellierung in einem Elektroantrieb. Anweisungen zum Verständnis. zusammen mit seiner freundlichen Erlaubnis zu veröffentlichen. Dieser Text wird noch für die Veröffentlichung in Fachpublikationen vorbereitet, aber die Leser des Habrir werden ihn zuerst sehen.
Weiter unter dem Schnitt
Kalachev Yu. N., Lantsev V.Yu., Okulov E.V.Bürstenloser Gleichstrommotor
(Praxis der Anwendung von Modellierung und Codegenerierung bei Aeroelectromash JSC)Hurra, Kameraden !!! Es ist passiert !!!
Schließlich sahen wir die Früchte progressiver Trends in der heimischen Antriebsindustrie.
Der Artikel beschreibt die Technologie zum Entwerfen eines elektrischen Antriebs mithilfe von Simulation und Codegenerierung. (Korrektes modellorientiertes Design )
Die Modellierung ist für unsere Treiber kein neues Problem. Aber nur wenige Menschen haben versucht, das Antriebssteuerungsprogramm automatisch aus seinem Modell zu generieren, und zwar auf globaler Ebene. ...
Wir wagen zu behaupten, dass sich dieser nützliche Trend (automatisches Schreiben eines Programms durch ein anderes Programm) in der zukünftigen digitalen Welt aktiv entwickeln wird .... Derjenige, der früher startet, wird gewinnen.
Wir möchten einen Vorbehalt machen, dass die Codegenerierung unserer Meinung nach nicht abbricht und den Programmierer nicht ersetzt, sondern ihm nur hilft. In diesem Fall glauben wir natürlich, dass der SI-Code des generierten Programms dafür offen sein sollte.
Das Ergebnis der automatischen Codegenerierung ist C-Code, der zur Anzeige und Analyse geöffnet ist.
In unserem Fall war das Steuerobjekt ein bestimmter elektrischer Antrieb mit einem bürstenlosen Gleichstrommotor (BDT), dessen Welle mit einem Getriebe verbunden ist, das die Drehung in eine Translationsbewegung der Stange umwandelt.
Die Aufgabe des elektrischen Antriebs ist ganz normal - die Welle der Stange vorzugsweise schneller und präziser zu positionieren ... Oft werden diese Antriebe zur Steuerung der Ruder unbemannter Luftfahrzeuge verwendet.
Das Gerätesteuergerät wurde in der Abteilung für elektrischen Antrieb von Aeroelectromash JSC auf der Basis des Mikrocontrollers 1986-1® (PKK Milander JSC) entwickelt und hergestellt. Es war notwendig, Algorithmen und ein Steuerungssteuerungsprogramm zu erstellen, um es bei praktischen Problemen weiter verwenden zu können.
Die Arbeiten wurden gemeinsam von Spezialisten des 3V-Serviceunternehmens und Mitarbeitern der Elektroantriebsabteilung von Aeroelectromash JSC durchgeführt.
Die erste Aufgabe unseres Teams war die Identifizierung des Kontrollobjekts. Hierzu wurden einige Messungen der Motoreigenschaften durchgeführt, die sich als recht spezifisch herausstellten.
Zum Beispiel hatte die gemessene Motor-EMK eine sehr bizarre Form, wie in Abbildung 1 gezeigt. <Br?

Abbildung 1. Gemessene Motor-EMK.
Wenn der Leser mit dem Simulink-Programm vertraut ist, weiß er, dass im Modell des Motors mit Konstanten und Magneten zwischen einer sinusförmigen oder einer trapezförmigen EMF gewählt werden kann.
Nun, und wohin soll man zum armen Bauern gehen? Wo ist der Sinus hier und wo ist das Trapez? (Die richtigen Modellierungswerkzeuge müssen offen sein!). In der SimInTech-Umgebung können auch solche Motorfehler berücksichtigt werden. Wir haben die in Abb. 2 gezeigte EMF-Form eingestellt

Abbildung 2. In SimInTech erstellte Motor-EMF
Finden Sie die beiden Unterschiede in Abb. 1 und Abb. 2. Wir haben eine Sache gefunden - Farbe.
Das nächste Merkmal des Motors war sein signifikantes Zahnmoment aufgrund der Geometrie des Statormagnetkreises und der fehlenden Abschrägung der Schlitze der Rotormagnete. Der Moment wurde experimentell gemessen und in das Modell eingeführt. Das Diagramm des Zahnmoments ist in Abb. 3 dargestellt.

Abbildung 3. Zinkenmoment.
Zusätzlich wurden die Magnetisierungsverluste im Motormodell berücksichtigt, das in mathematischen Modellen anderer Entwickler von Simulationsprogrammen fehlt.
Ferner wurde der Betrieb des elektrischen Antriebs mit den Simulationsergebnissen in Testmodi verglichen. Unten in Abb. Die Abbildungen 4 und 5 zeigen die Ergebnisse eines Leerlauftests (maximale Frequenz ohne Last).

Abbildung 4. Leerlauf. Echter Motor.

Abbildung 5. Phasenstromleerlauf. Simulationsergebnis.
Fazit:
Oszillogramme von Real- und Modellleerlauf fallen zusammen. Optisch ist der Unterschied nicht sichtbar.
Nach einem erfolgreichen Leerlauftest wurde ein dynamischer Aufpralltest an einem Motor mit angebautem Getriebe durchgeführt. In diesem Experiment wurde eine konstante Spannung an die Motorwicklungen mit einer Umkehrung bei einer Frequenz von 30 Hz angelegt. In diesem Fall schwang die Ausgangsverbindung mit derselben Frequenz. Abbildung 6 zeigt die Ergebnisse dieses Experiments:
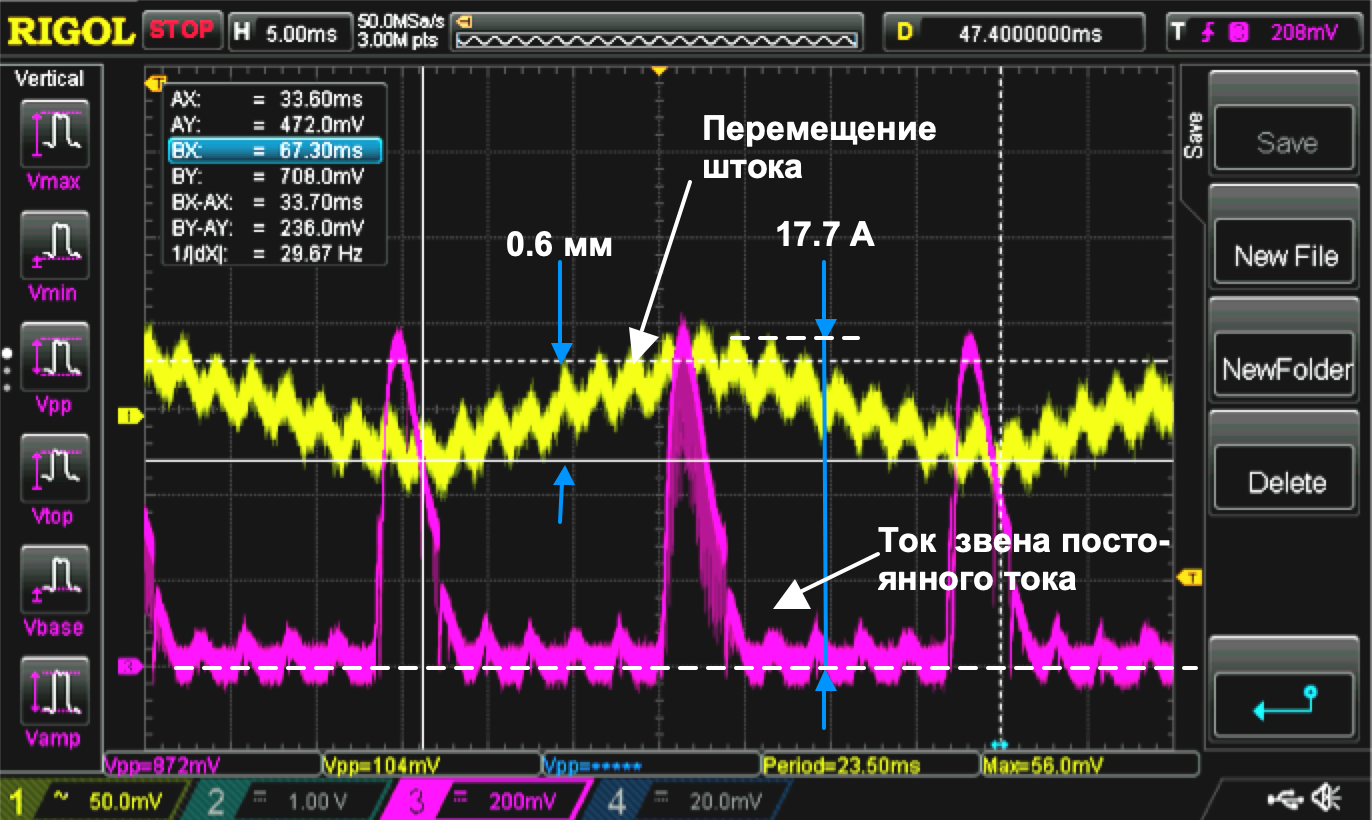
Abbildung 6. Realer Motor unter Last
(Die Signale wurden mit Interferenz aufgenommen. Hochfrequenzjitter und Unschärfe sind Interferenzen in den Signalen der Positions- und Stromsensoren.)
Die erhaltenen Daten wurden mit einem Antriebsmodell verglichen, das in einem ähnlichen Modus arbeitet (Fig. 7).

Abbildung 7. Modell unter Last
Schlussfolgerungen:
- Die Bewegungen der Stange in der Realität und auf dem Modell stimmen vollständig überein
- Spitzenwerte des realen Motorstroms und des Modells stimmen mit der Genauigkeit des Messfehlers überein.
Der Typ des verifizierten Modells der Leistung und der mechanischen Teile des elektrischen Antriebs, die auf Standardbibliothekselementen des SimInTech-Programms basieren, ist in Abb. 8 dargestellt.
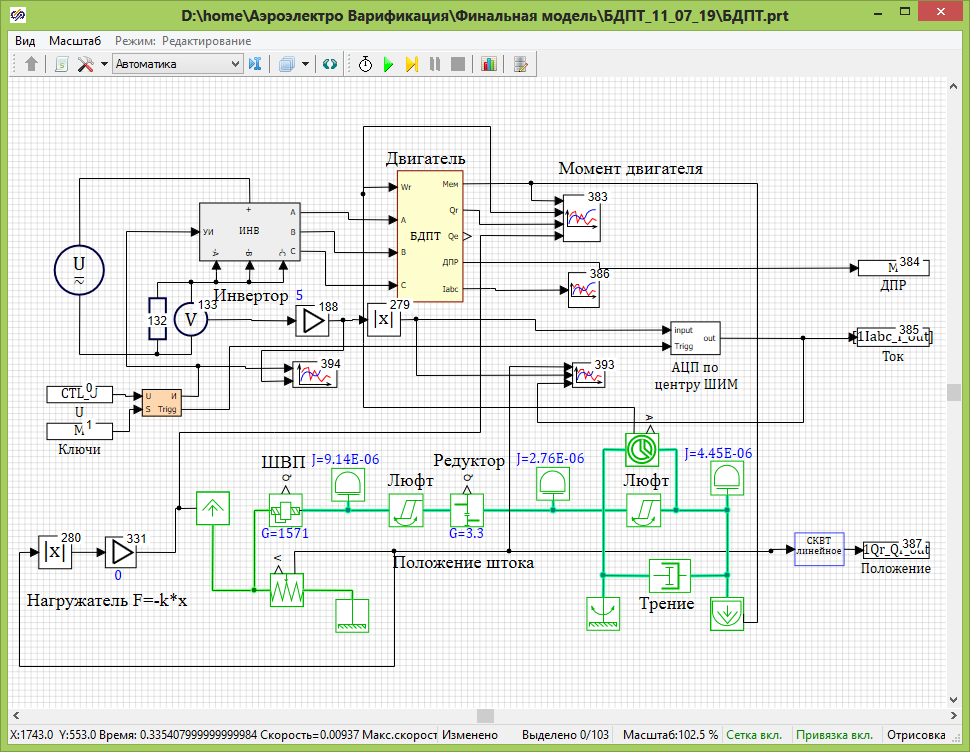 Abbildung 8. Schema eines komplexen Modells eines elektrischen Antriebs einschließlich des mechanischen Teils.
Abbildung 8. Schema eines komplexen Modells eines elektrischen Antriebs einschließlich des mechanischen Teils.Es besteht aus Modellen:
- Wechselrichter
- Motor mit Rotorpositionssensor (DPR)
- mechanisches Getriebe
- Stromsensor
- Lader
Nachdem Sie sichergestellt haben, dass das Verhalten des Modells mit dem Verhalten des realen Produkts übereinstimmt, können Sie gemäß den Simulationsergebnissen die erforderliche Struktur des Steuerungssystems (CS) auswählen und für die verschiedenen in der technischen Aufgabe aufgeführten Eingabetypen konfigurieren.
In unserem Fall wurden gute Ergebnisse durch ein Zweikreis-Lageregelungssystem mit Dämpfungskopplung in der Geschwindigkeit gezeigt. Eine Modellansicht dieser Struktur ist in 9 gezeigt.
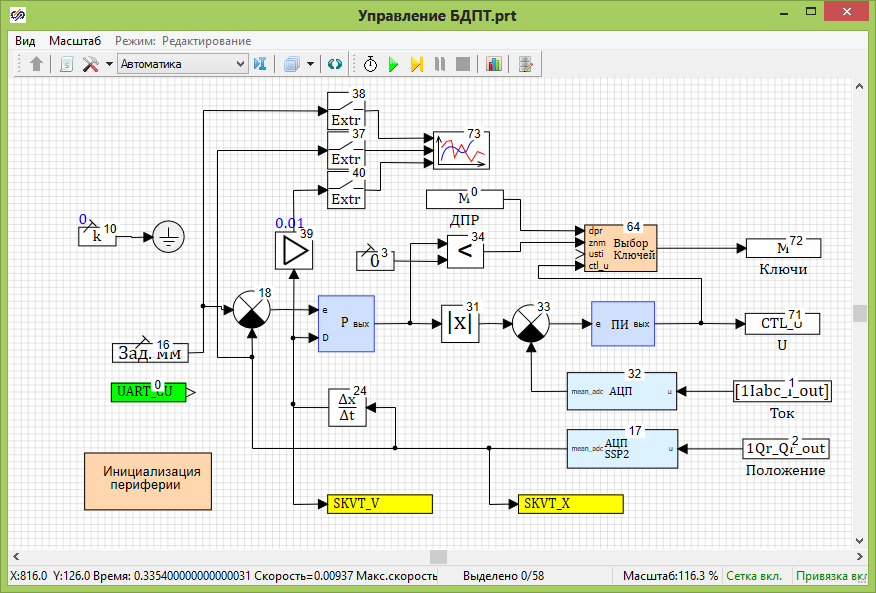
Abbildung 9. Das Entwurfsschema des Antriebssteuerungsprogramms.
Bei weiterer Verwendung der Codegenerierung ist keine manuelle Codierung von Steuerungssystemalgorithmen erforderlich - ein abgeschlossenes Projekt in der Entwicklungsumgebung von Keil uVision wird automatisch erstellt. Nach dem Zusammenstellen des Binärbilds des Programms kann es in unseren Prozessor (1986BE1T) übersetzt werden.
Beachten Sie, dass die Modellblöcke „Key Choice“, „Peripheral Initialization“, „ADC“ und „SSP2 ADC“ im Simulationsmodus die entsprechenden mathematischen Modelle implementieren und während der Codegenerierung durch Bibliotheken für die Arbeit mit den Peripheriegeräten des verwendeten Prozessors ersetzt werden.
Nachdem wir die Struktur des Steuerungssystems und seine Einstellungen ausgewählt hatten, mussten wir:
- Führen Sie eine automatische Codegenerierung des Programms durch
- Schreiben Sie das empfangene Programm in die Steuerung
- Erfassen Sie großartige Ergebnisse
In Abb. 10 können Sie den Betrieb des Modells und des realen Laufwerks vergleichen. Als Positionsreferenz wurde eine Sinuskurve mit einer Frequenz von 3 Hz und einer Amplitude von 3 mm verwendet.
Um Daten von der Steuerung zu erhalten, wurde in ihrem Programm ein spezieller Teil bereitgestellt, der das Lesen interner Signale über eine serielle Schnittstelle ermöglichte. Während das Laufwerk ausgeführt wird, sieht der Benutzer die Ergebnisse der Firmware im SimInTech-Fenster.

Abbildung 10. Vergleich des Modells und des realen Laufwerks.
Nun, auch die Farbe ist hier gleich ....
Hurra, Kameraden !!! Es ist passiert !!!
Jeder, der sich für das Thema Elektroantrieb interessiert, empfiehlt, das kostenlose Buch
Kalachev Yu.N. Modeling in the electric drive herunterzuladen
.