Die Geburt des Remote Reality-Konzepts
Die Geschichte unseres „verrückten“ Projekts begann vor drei Jahren, als meine Freundin Lesha über die Zukunftsaussichten der Entwicklung der Spielebranche nachdachte und sagte: „Stellen Sie sich eine Zukunft vor, in der Menschen in Form von Unterhaltung aus allen Teilen der Welt echte Roboter auf einem Spielfeld wie„ Avatare. "

Die Idee erschien uns zunächst recht interessant und nicht schwer umzusetzen. Wir setzten uns sofort auf die Suche nach ähnlichen Projekten und stellten überrascht fest, dass niemand so etwas getan hatte. Es schien seltsam, weil die Idee buchstäblich "an der Oberfläche" war. Wir haben viele Spuren von Amateur-Prototyping-Projekten in Form eines Chassis mit einer Arduino-basierten Kamera gefunden, aber niemand hat ein Projekt zu seinem logischen Abschluss gebracht. Später, als wir scheinbar endlose Schwierigkeiten und Probleme überwunden hatten, verstanden wir den Grund für das Fehlen von Analoga, aber anfangs schien uns die Idee äußerst einfach und schnell umzusetzen.
In der nächsten Woche widmeten wir uns der Entwicklung des Konzepts. Wir haben uns Dutzende von Robotervarianten mit unterschiedlichen Fähigkeiten und Hunderten von Spielbereichen vorgestellt, zwischen denen sich die Spieler sofort durch den "Teleport" bewegen können. Jeder, der auf der Grundlage unserer „Entscheidung“ wollte, hatte die Möglichkeit, ein eigenes Spieltrainingsgelände in verschiedenen Maßstäben zu errichten.
Wir haben sofort entschieden, dass diese Gedanken eher in das Konzept einer Unterhaltungsattraktion als in ein Computerspiel passen. Die Leute lieben Unterhaltung und wollen etwas Neues, und wir wussten, was wir ihnen bieten können. Wie in jedem Unternehmen tauchte das Problem der Rückzahlung sofort auf, denn auf den ersten Blick scheint unser physisches Modell durch die Anzahl der Roboter begrenzt zu sein. Aber multipliziert man die Roboter mit 24 Stunden und dem Preis für eine Stunde von 5-10 Dollar, verschwanden die Zweifel. Das Finanzmodell war nicht Klondike, aber es zahlte sich sogar bei 10% Last aus.
Sehr schnell tauchte in unserem Kopf der Name eines neuen Konzepts auf: Remote Reality, analog zu Virtual Reality und Augmented Reality.

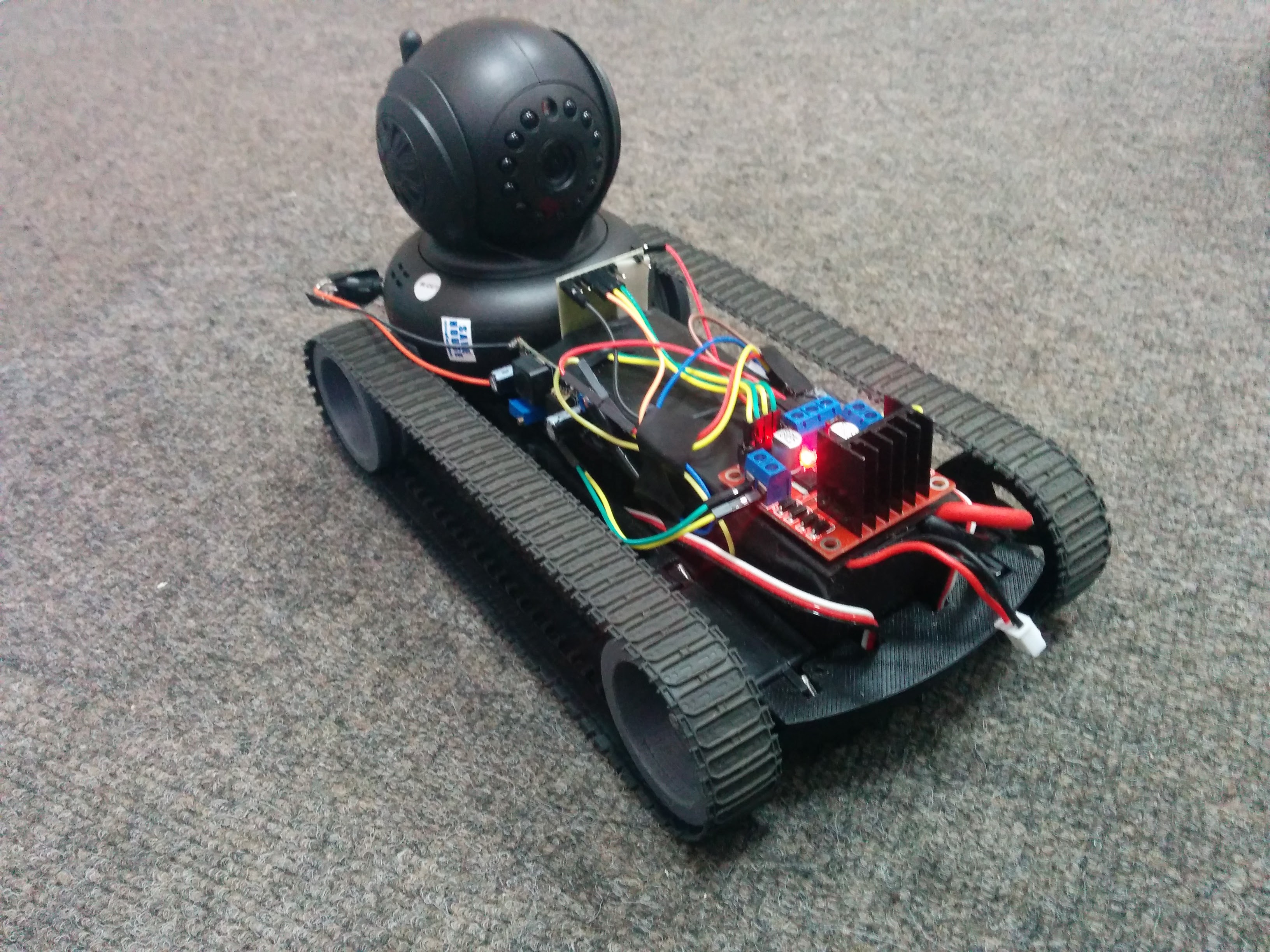
Wie der Rest der "Experimentatoren" nahmen wir zuerst die Maschine auf die Funksteuerung, setzten eine chinesische Wi-Fi-Kamera darauf, installierten das Arduino-Board und unser Roboter "ging". Wir haben unseren Freund aus den USA gebeten, sich über das Internet mit der Schreibmaschine zu verbinden. Er konnte in unserem Büro herumfahren und wir waren begeistert. Verzögerungen bei der Steuerung und beim Videostream in wenigen Sekunden schienen uns kein Problem zu sein.
Von diesem Moment an haben wir unsere Arbeit in zwei Bereiche unterteilt:
- Modellierung und Bau eines Spielplatzes
- Entwicklung und Entwicklung von Robotern und Steuerungssystemen
Gullivers in der Stadt Pripyat
Ich werde meine Geschichte mit einem Übungsplatz beginnen. Wir haben verstanden, dass die Leute irgendwo spielen mussten. Der Ort muss weltberühmt, „mysteriös“ und unkompliziert in der technischen Umsetzung sein. Als wir viele Optionen durchgingen, kamen wir plötzlich auf die Idee von Tschernobyl. Die Zone von Tschernobyl erfüllte alle unsere Anforderungen, und vor allem konnten alle möglichen zukünftigen Ausfälle und Schäden am Spielplatz auf den Apokalypseposten zurückgeführt werden.
Nachdem wir einen Raum mit einer Fläche von 200 Quadratmetern gefunden hatten, machten wir uns an die Arbeit, die schließlich zwei Jahre dauerte. Wir haben die Straßen und Texturen von Häusern gemalt und dreidimensionale Modelle von Gebäuden einschließlich Innenböden erstellt. Dann schnitten sie alles aus Spanplatten und Sperrholz, bauten Gebäude aus Hunderten verschiedener Teile zusammen.

Wir haben versucht, alle Texturen von Pripyat so genau wie möglich wiederherzustellen und auf Google Maps "auszuspionieren". Natürlich erlaubte uns die Größe des Raumes nicht, alles genau zu gestalten, und wir wollten die Details nicht missen, deshalb mussten wir zum Beispiel das KKW Tschernobyl näher an Pripyat heranrücken.
Es ist schwierig zu berechnen, wie viele Hundert Bretter, Dutzende Sperrholzplatten, Faserplatten und andere "Verbrauchsmaterialien" wir ausgegeben haben. In den letzten drei Monaten sind wir buchstäblich mit Pinseln und Farben auf alle viere gekrochen und haben Häuser und Böden dekoriert. Wir wollten das maximale Detail. Der Maßstab der Stadt betrug 1:16 und die 9 Stockwerke hohen Häuser befanden sich ungefähr auf der Höhe der Brust des Erwachsenen. In dieser Stadt fühlten wir uns wie echte Giganten.

Ein bisschen über uns
Dann ist es wahrscheinlich Zeit, über unser Team zu sprechen. Anfangs hatten wir nur zwei Ingenieurfreunde. Als wir über das Projekt nachdachten, verstanden wir, dass es schwierig sein würde, einen Investor für solch eine „abenteuerliche“ Idee zu finden, und beschlossen, alles für unser Geld zu tun. Während der Arbeit haben uns viele Menschen geholfen. Jemand ist frei, jemand, den wir um Hilfe gebeten haben.

Ein gutes Beispiel für Teamarbeit war die Geschichte des 3D-Drucks. Wir haben unseren Drucker zusammengebaut und die Teile zum ersten Mal selbst gedruckt, bis wir zu dem Schluss kamen, dass Sie nicht auf alles spezialisiert sein können. Das Drucken hat uns viel Zeit gekostet, Teile der Teile waren groß und eine unerwartete Ehe am Ende des Drucks von Teilen hat alle unsere Pläne verdorben. Als Ergebnis fanden wir einen „engen“ 3D-Druckspezialisten, der später Teil unseres Teams wurde. Nachdem er unsere Träume geteilt hatte, half er uns, Roboterkörper einfach auf Kosten von Plastik herzustellen.
Beim Sammeln von Robotern konnten wir nicht auf die Hilfe eines Drehers verzichten. Einer unserer Freunde hat uns dabei geholfen. Die Bauarbeiten auf der Deponie erforderten oft nicht standardmäßige und komplexe Lösungen. Wir hatten großes Glück, die Leute kennenzulernen, die uns auch in diesen Angelegenheiten aktiv geholfen haben.
Das Projekt hatte großes Glück mit dem Designer, dem Künstler, sein Talent war von unschätzbarem Wert.



Um beim Bau der Spielarena so viel wie möglich zu sparen, mussten wir fast alles selbst machen. Neben einem großen Übungsplatz gab es aber auch einen technischen Teil ...
Videoverzögerung besiegen
Sicherlich sind Fragen zur technischen Umsetzung des Projekts für Sie interessanter als die Beschreibung unserer „Stadtplanung“.
Kehren wir zu dem Moment zurück, in dem wir, wie Sie sich erinnern, die Kamera auf den „Wagen“ gestellt haben und sie steuern konnten. Anschließend war es an der Zeit, die Hardware und Technologie für die Herstellung unserer Roboter auszuwählen. Hier wartete die erste Überraschung auf uns: Nachdem wir ein Dutzend Kameras durchlaufen hatten, konnten wir keine Signalverzögerung erreichen, bei der die Steuerung des Roboters über das Internet bequem wäre. Alles war kompliziert, als es dauerte, Kameraproben in China zu bestellen und zu testen.
Wir wollten das Robotersteuerungssystem vollständig im Browser erstellen, ohne „unseren wunderbaren Client herunterladen“ und veraltete Flash-Player. Dies hat die Liste der Technologien und Kameras, die sie unterstützen, erheblich eingeschränkt. Wir haben lange mit der Übertragung eines Videostreams im MJPEG-Format experimentiert, aber am Ende haben wir diese Idee aufgegeben. Diese Experimente haben uns sechs Monate gekostet. Wir haben sogar die ersten fünf Roboter komplett zusammengebaut und offene Tests für alle gestartet, aber ...
Live-Tests haben gezeigt, dass der Router nicht in der Lage ist, einen riesigen Videostream von mehreren Robotern im MJPEG-Format über Funk zu verarbeiten, sobald wir versucht haben, die Bildauflösung zu optimieren. Der Videostream von einem Roboter konnte nicht unter 20-30 Mbit liegen, was den stabilen gleichzeitigen Betrieb der von uns geplanten 20 Roboter unmöglich machte. Außerdem konnten wir nicht ohne Verzögerung eine fertige Schallübertragungslösung finden. Dies führte dazu, dass wir erneut nach der für unsere Aufgaben geeigneten Technologie suchen mussten.
Infolgedessen haben wir uns für WebRTC entschieden. Dies sicherte uns die Übertragung von Videobildern und Ton mit einer Verzögerung von nur 0,2 Sekunden.

Dann ist es Zeit, Roboter zu simulieren und zusammenzubauen. Um weniger von externen Lieferanten abhängig zu sein, haben wir alle Details unserer Bots auf einem 3D-Drucker gedruckt. Auf diese Weise konnten wir das kompakteste Modell des Roboters erstellen und die gesamte Elektronik und die leistungsstarken Batterien optimal einsetzen.
Stromversorgungssystem
Die nächste Frage bezog sich auf die Stromversorgung, weil wir die Batterien wirklich so wenig wie möglich wechseln wollten. Nachdem wir viele vorgefertigte Optionen durchlaufen hatten, entschieden wir uns für unseren eigenen Akku, der aus Elementen der Panasonic 18650B zusammengesetzt war. Eine Batteriespannung von 17 Volt und eine Kapazität von 6800 mAh ermöglichten es unseren Robotern, 10-12 Stunden mit einer einzigen Ladung zu fahren.

Während der Experimente haben wir hundert Elemente erfolgreich „getötet“, weil wir die Kapazität der Elemente maximal nutzen wollten und die Spannung am Ende der Entladung sehr schnell abfiel und unsere einfache Spannungsanzeige, die auf einem Teiler montiert war, nicht immer genaue Messwerte lieferte. Am Ende haben wir jedoch den Schwellenwert für die minimal zulässige Spannung von 2,5 Volt auf 3,2 Volt erhöht und einen Mikrokreis für eine präzise Spannungsregelung eingestellt, und die Panasonic-Fälle von „Tod“ wurden eingestellt.
Als Ladegeräte haben wir die bei Modellierern beliebten iMax B6-Geräte mit der Option zum Laden im Elementausgleichsmodus ausgewählt. Wir haben einige der Batterien aufgrund einer unsachgemäßen Kalibrierung chinesischer Kopien des iMax B6 „getötet“. Wir haben fünf Dosen angeschlossen und im Ausgleichsmodus aufgeladen. Am Ende des Ladevorgangs wurde die Gesamtspannung der Batterie überprüft, ohne sie in Zellen zu zerlegen, aber tatsächlich war eine Bank nicht vollständig aufgeladen und "starb" zuerst.
Motoren für Roboter
Sicherlich haben sich viele von Ihnen die Frage gestellt: Warum 17 Volt? Die Antwort liegt in den Motoren. Motoren sind der zweite Teil unserer „chinesischen Qual“ nach der Auswahl von Kameras. Wir haben viele verschiedene Motoren durchgesehen. Zu unserem Entsetzen hatten fast alle eine kleine Ressource und scheiterten schnell. Nach 3-4 Monaten gelang es uns während der Experimente, einen Hersteller von „normalen“ Motoren in Bezug auf Zuverlässigkeit zu finden, aber es gab immer noch keine endgültige Lösung.
Bei einer herkömmlichen Maschine spielt das Getriebe eine Schlüsselrolle bei der Kraftübertragung vom Motor auf die Räder. Wir hatten es nicht. Durch die Reduzierung der Spannung an den Motoren haben wir die Geschwindigkeit des Roboters erfolgreich reduziert, aber gleichzeitig ging seine Leistung verloren und unsere „Panzer“ konnten sich nicht langsam drehen. Bald haben wir dieses Problem gelöst.
Oh, ich sagte, dieses Wort ist "Tanchiki".
Warum sind die "Panzer"?
Warum genau die "Panzer"? Die Antwort ist einfach. Wenn wir der Kameraverzögerung eine unbekannte Verzögerung des Internetkanals hinzufügen, kann ein Einwohner Australiens nur etwas relativ Langsames bequem steuern. Dies war das erste Argument für die Auswahl von Panzern, und das zweite Argument, das uns schließlich überzeugte, bestand in der komfortablen Steuerung des Roboters. Eine Person gewöhnte sich daran, indem sie auf den „Pfeil“ rechts klickte, um darauf zu warten, dass sich der Roboter nach rechts drehte. Ohne Raupen war dies unmöglich, da sich nur die Panzer „an Ort und Stelle“ drehten. Wir haben uns auch über die erwartete „Super-Cross-Country-Fähigkeit“ gefreut. Nachdem wir in China eine Schachtel Gummiketten bestellt hatten, begannen wir, "Rad-Rollen" unter die Ketten zu drucken.

Die allerersten Tests haben unsere Träume in Stücke gerissen, Raupen flogen oft aus dem Tank, wenn sie auf niedrige Hindernisse stießen. Nachdem wir die Grundlagen der Tankmechanik studiert und verschiedene Spanner und Hilfsräder ausprobiert hatten, konnten wir dieses Problem immer noch nicht lösen. Ich musste mich von den Raupen trennen. Da die Roboter bereits gedruckt und zusammengebaut waren, mussten wir nach einer schnellen und unkomplizierten Lösung suchen, aber es war eine Sache - gute Räder mit einem Gummiprofil. Und wie drehst du dich an der Stelle um, die du fragst? Wir sind "ausgestiegen", indem wir die beiden Achsen mit einem dünnen Riemen eines 3D-Druckers miteinander verbunden haben. Im Allgemeinen haben wir einen Radroboter mit Allradantrieb und einer Rotation installiert.

Roboterherz
Wir haben bereits über die meisten Elemente unseres Roboters gesprochen und nichts über die wichtigste Komponente gesagt.
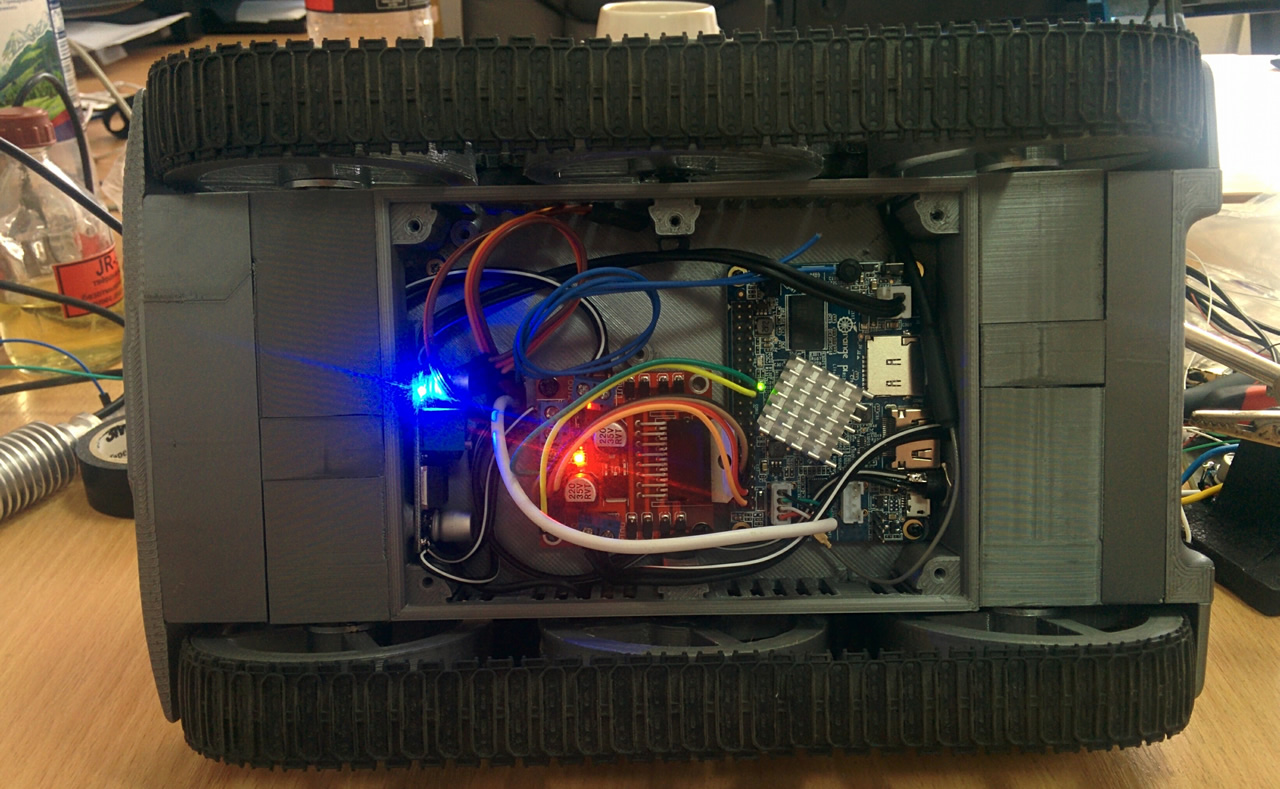
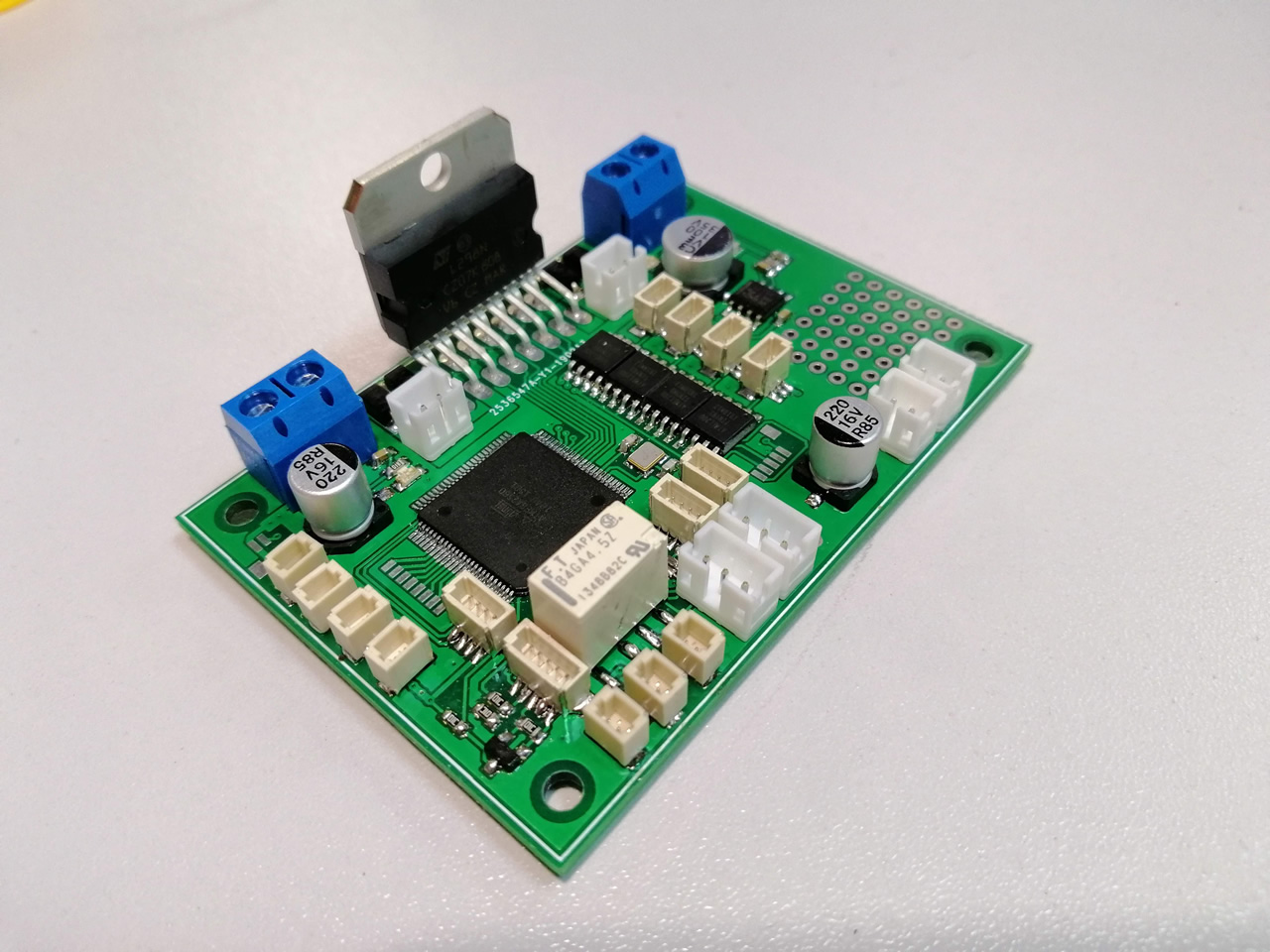
Unser Bot basierte auf dem Raspberry Pi Mini-Computer unter Linux und einer speziell entwickelten Software, mit der der Roboter mit dem Server kommunizieren kann. Der Raspberry Pi arbeitet mit unserer Überwachungs- und Steuerkarte zusammen. Die Karte enthält einen Mikrocontroller, einen Motortreiber, Signalverarbeitungschips von verschiedenen Sensoren und ein Modul zur präzisen Steuerung der Batteriespannung. Zur Vereinfachung der Montage haben wir absolut alle Peripherieanschlüsse auf separaten Anschlüssen implementiert.
Wie ich bereits erwähnt habe, mussten wir häufig Komponenten wechseln, wenn wir mit unvorhergesehenen Problemen konfrontiert waren. Diesmal ist es auch passiert. Zunächst haben wir die ersten Roboter auf dem Orange Pi zusammengebaut, um Geld zu sparen. In Zukunft mussten wir sie durch einen Raspberry Pi 2 B ersetzen. Dies war jedoch nicht das Ende. Wir mussten diesen Mini-Computer bald wieder durch eine Version des Raspberry Pi 3 B + ersetzen, die ein 5-GHz-Modul an Bord des WiFi hatte. Aber dazu später mehr.
Wi-Fi-Setup
Das nächste Problem, das uns erwartete, war der Wi-Fi-Funkkanal. Wir haben davon erst erfahren, indem wir die Tests sofort mit 10 Robotern in Bewegung gestartet haben. Unsere Deponie befand sich in einem geschlossenen Keller und die "Reflexion" von Stahlbetonwänden war einfach schrecklich. Die Steuerbefehle gingen in Ordnung, aber der Videostream wurde wild "langsamer", als einer der Roboter in die hinterste Ecke des Raums ging.
Der Übergang von 2,4 GHz auf 5 GHz half uns, die Kanalbelastung zu bewältigen. Aber die Schwierigkeiten endeten nicht dort. Wenn der Roboter um eine Ecke fuhr, fiel das Signal unter -80 dBm und die Bremsen starteten. Schließlich haben wir das Problem gelöst, indem wir eine Sektorantenne mit Diversity-Empfang installiert und die Sendeleistung auf ein halbes Watt erhöht haben. Natürlich musste der Router mit einem leistungsstarken Prozessor aus dem Segment Business Solutions "abgeholt" werden.
Es ist erwähnenswert, dass wir lange Zeit versucht haben, den "nahtlosen" Roaming-Modus basierend auf der Ubiquity-Lösung zu konfigurieren, anstatt die Leistung zu erhöhen. Leider hat das Wi-Fi-Modul, das wir "abgelehnt" haben mussten, dies unterstützt, aber das iPhone funktionierte perfekt und bewegte sich zwischen mehreren Zugriffspunkten.


Nachdem wir „zehn“ Roboter gesammelt und den Überwachungs- und Steuerungsserver gestartet hatten, gingen wir im November 2018 mit dem Projekt Isotopium Chernobyl zu Kickstarter. Wir wussten nicht einmal, dass Zehntausende von Menschen unser Spiel bald ausprobieren würden.
Lesen Sie in unserem nächsten Artikel über unseren zukünftigen Artikel und warum wir das Projekt fast abgeschlossen haben: Online-Spiel mit RC-Modellen, die über das Internet gesteuert werden
