Beiträge in der Reihe:
8. Wir steuern von der Telefon-ROS-Steuerung, GPS-Knoten7. Roboterlokalisierung: Gmapping, AMCL, Referenzpunkte auf der Raumkarte6. Kilometerzähler mit Radgebern, Raumkarte, Lidar5. Wir arbeiten in Rviz und Pavillon: Xacro, neue Sensoren.4. Erstellen Sie eine Robotersimulation mit den Editoren rviz und pavillon.3. Beschleunigen, Kamera wechseln, Gang fixieren2. Software1. EisenWenn Sie anfangen, ROS (Robotic Operation System) zu studieren, werden Sie zuerst erstaunt sein, wie „alles kompliziert ist“, von der Menge an Informationen über Themen, Knoten, Aktionen bis hin zu Ihrem Kopf. Und der erste Wunsch ist es, den Roboter wieder mit den guten alten Skripten zu verwalten. Aber nein. Jeder erwachsene Mann sollte etwas weniger für einen Mann sammeln, der fahren, blinzeln, quietschen würde. ROS wurde als Plattform ausgewählt, da dies immer noch der nächste Schritt in der Entwicklung von Robotern in der Welt des seelenlosen Arduino ist. Es wird vorgeschlagen, den ROS "Wagen" zusammenzubauen, der nicht nur billig, sondern auch funktional ist: Er kann mit Ihrer Katze, Ihrem Körper entlang der Linie auf dem Boden gehen :) Die ersten Schritte sind:
Noch ein paar Texte
Das zweite, was beim Studium von ROS auffällt, sind die Kosten für Plattformen auf dem Markt. Eine Reihe von Turtlebot-Burger (
als einer der erschwinglichen ) - $ 549 (34.500 p.). Alles andere ist noch teurer. Hier kann argumentiert werden, dass der Löwenanteil des Preises Lidar ist, ein Gerät zur Bestimmung der Position des Roboters im Weltraum. Was an sich unter 15k p steht. Alle anderen Komponenten sind jedoch auch nicht billig.
Berechnen wir, wie viel uns unser "Wagen" kosten wird:
Gesamt: 8000 p.
Der Preis ist ebenfalls hoch, aber um eine Größenordnung billiger als Turtlebot. Auf Wunsch können Autos auf einem 3D-Drucker gedruckt werden oder ein Stück Sperrholz nehmen. Dann bleibt nur noch Gleichstrommotoren zu nehmen. Die Batterie für Himbeere kann auch durch eine billigere analoge ersetzt werden. Hauptsache, sie gibt 5V 3A ab.
Wir sammelnDas Projekt basierte auf einem zuvor vorhandenen Projekt -
www.rosbots.com/build_it , jedoch mit wesentlichen Änderungen. Darüber hinaus wurde das Basisprojekt nach den Informationen auf der Website aufgegeben, sodass Sie sich alles selbst merken müssen.
Der Beginn der Montage und Montage der Motoren ähnelt den obigen Anweisungen:
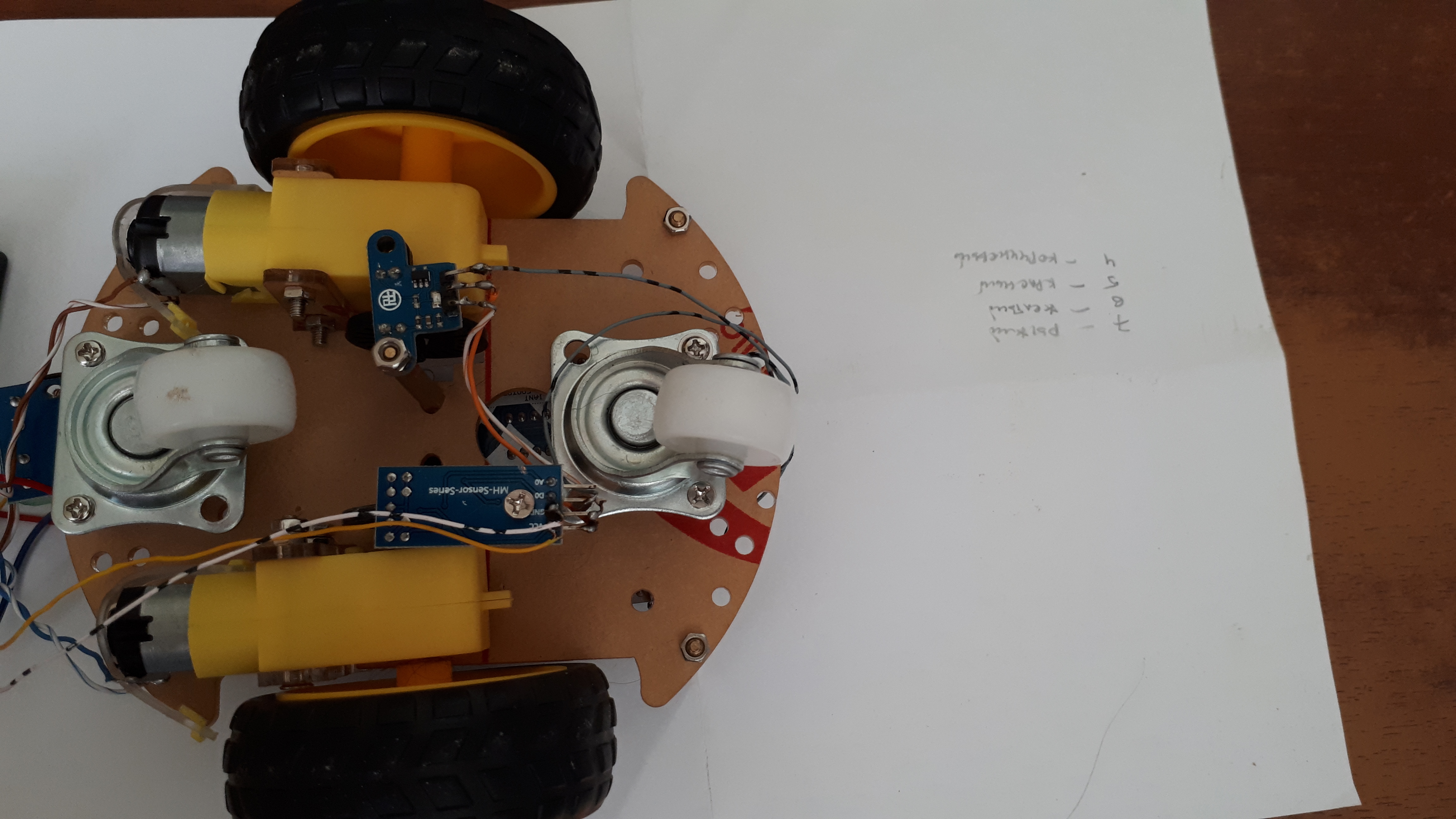
Hier müssen Sie auf die Encoder achten, die so montiert sind, dass sie die Scheiben mit Schlitzen "bedecken", die auf Motoren gekleidet sind:
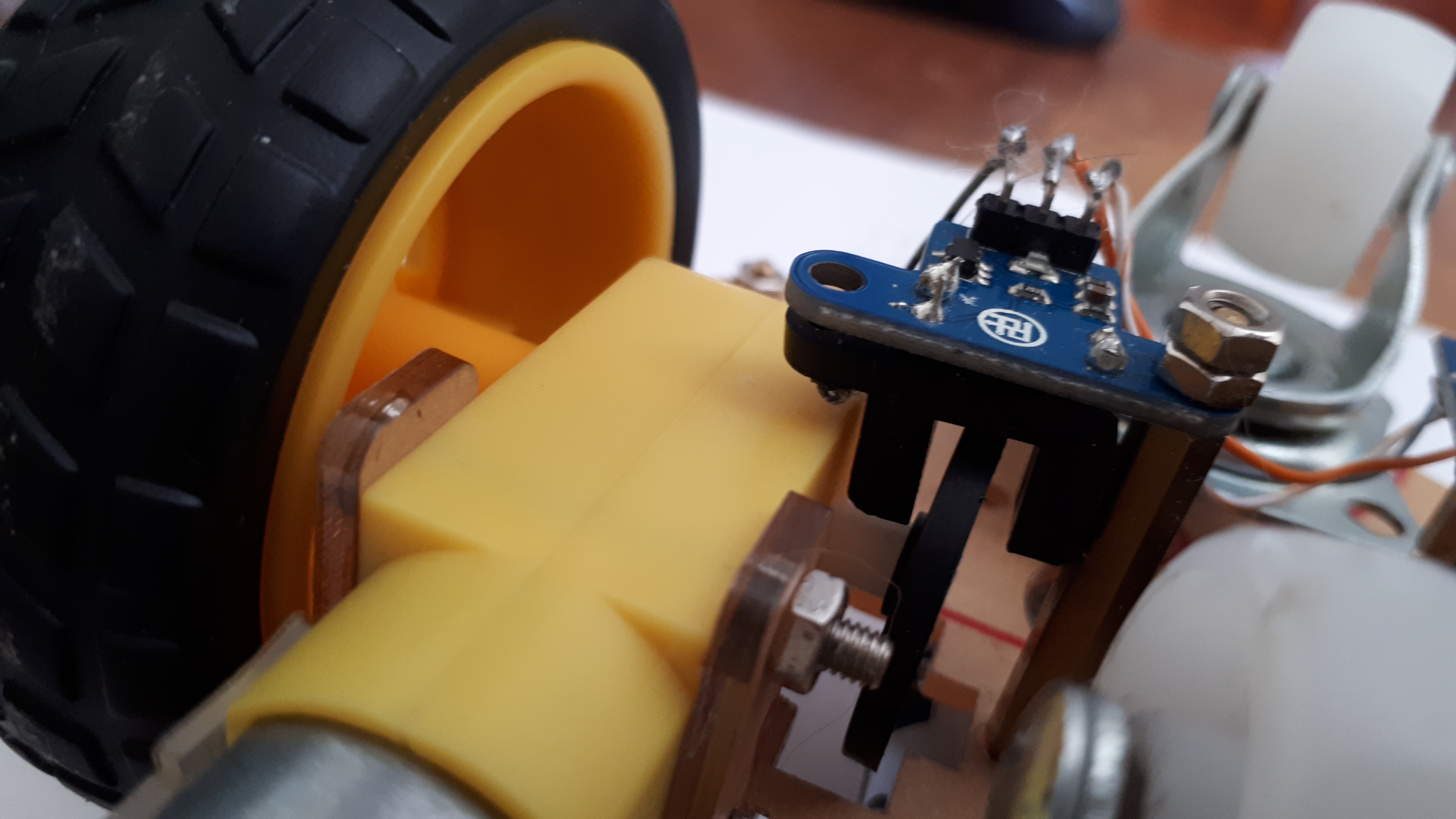
* Im Allgemeinen sind Encoder nicht sehr nützlich und können nicht montiert werden. Mit optischen Encodern können Sie die zurückgelegte Strecke bestimmen, aber leider können Sie die Bewegungsrichtung nicht bestimmen.
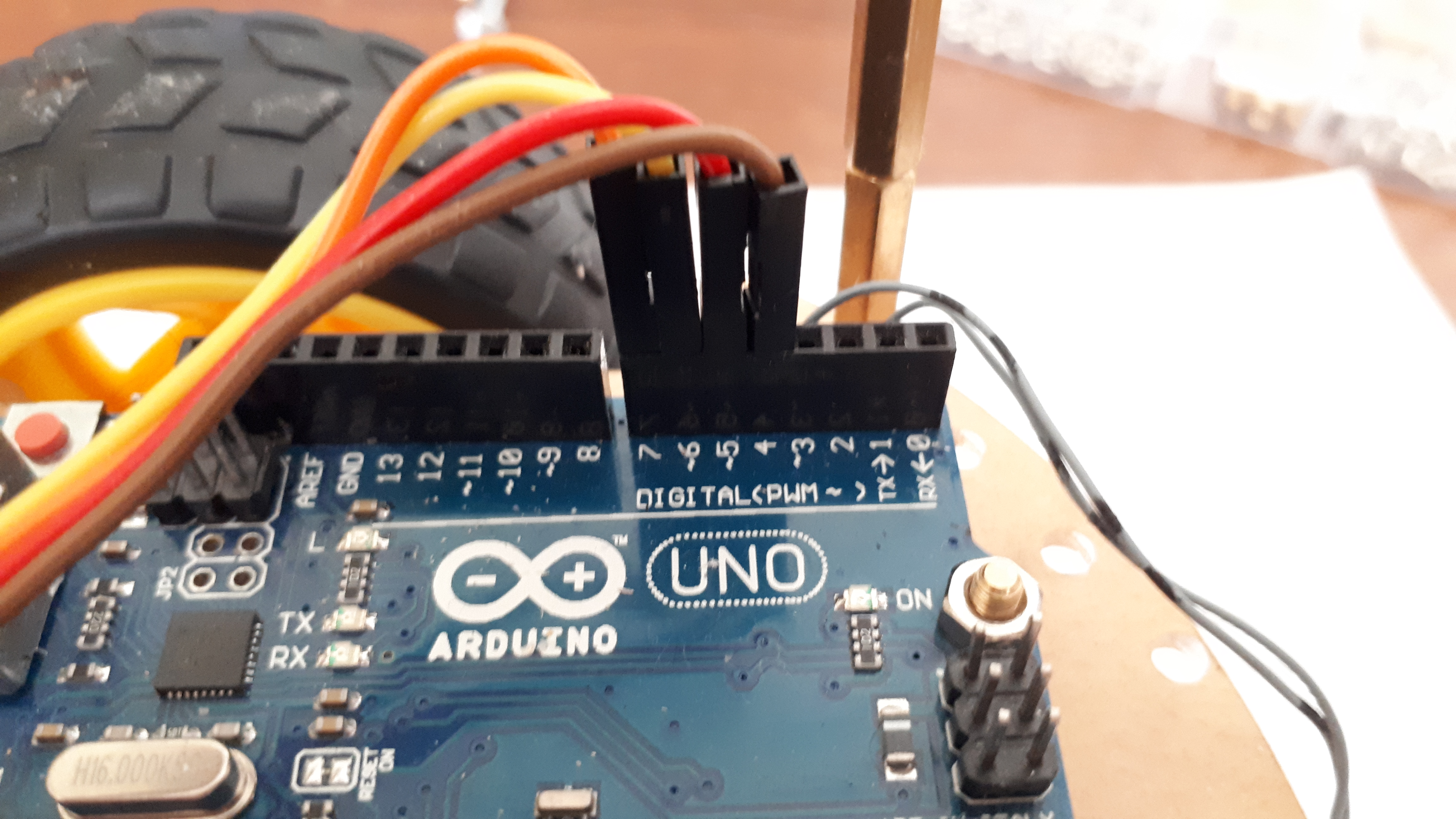
Nach der Montage der Motoren und Encoder (optional) verbinden wir die Drähte mit dem Uno Arduino, dem Motortreiber, dem Batteriefach von 2 18650 Batterien. Der Anschlussplan ähnelt dem auf der Basisprojekt-Website angegebenen mit einer Ausnahme:

5 V für Encoder können mit Arduino aufgenommen werden (VCC vom rechten Geschwindigkeitssensor und vom linken Geschwindigkeitssensor bei 5 V Arduino).
Wir reparieren das Arduino und den Motortreiber, Leistung für den Fahrer:

Nudeln näher:
Lokführer. Die grünen Klemmen enthalten Adernpaare von den Motoren:

Arduino wird nicht mit Batterien betrieben, sondern über USB mit Himbeeren verbunden.
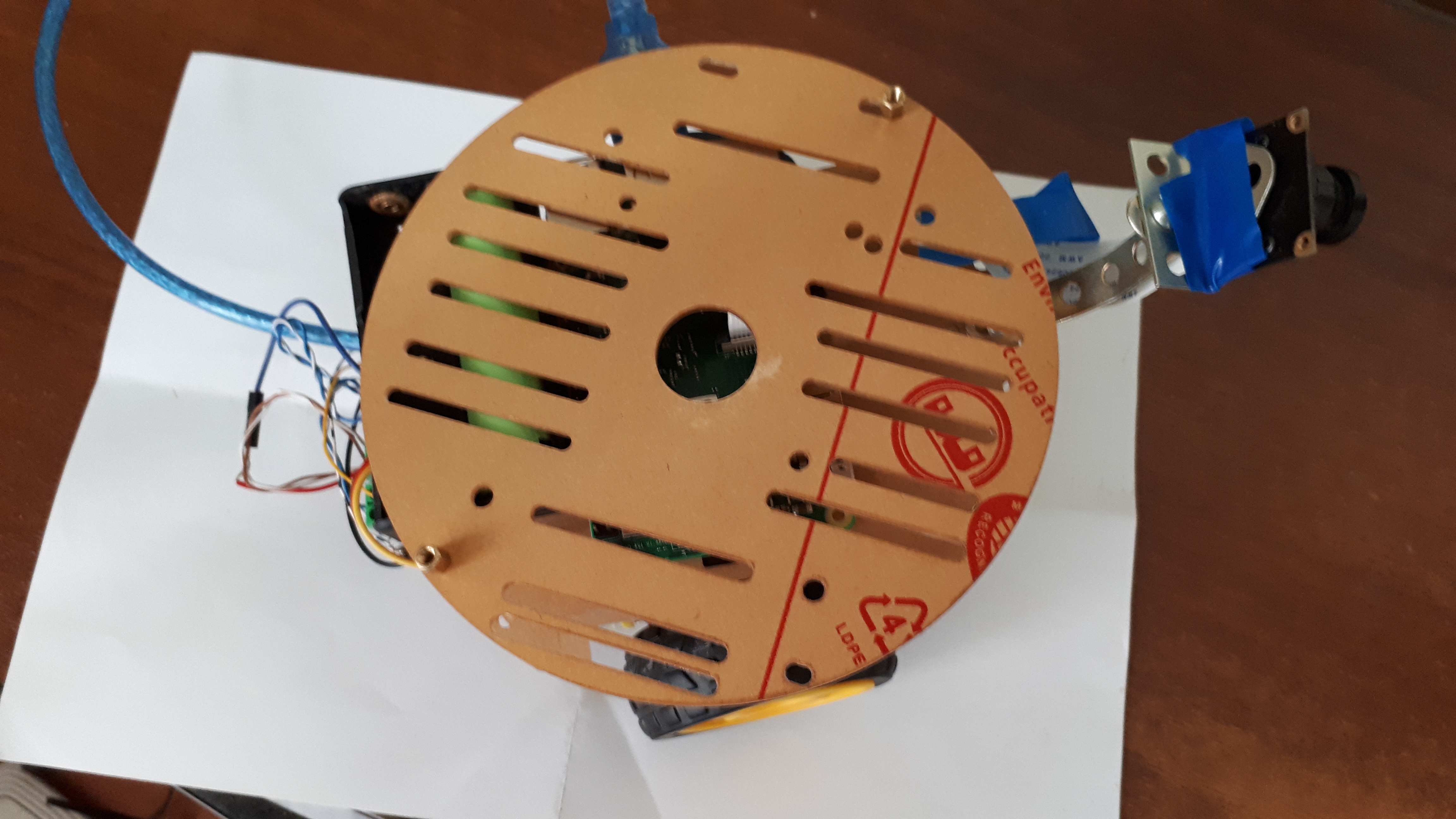
Wir setzen die zweite Schicht der Maschine
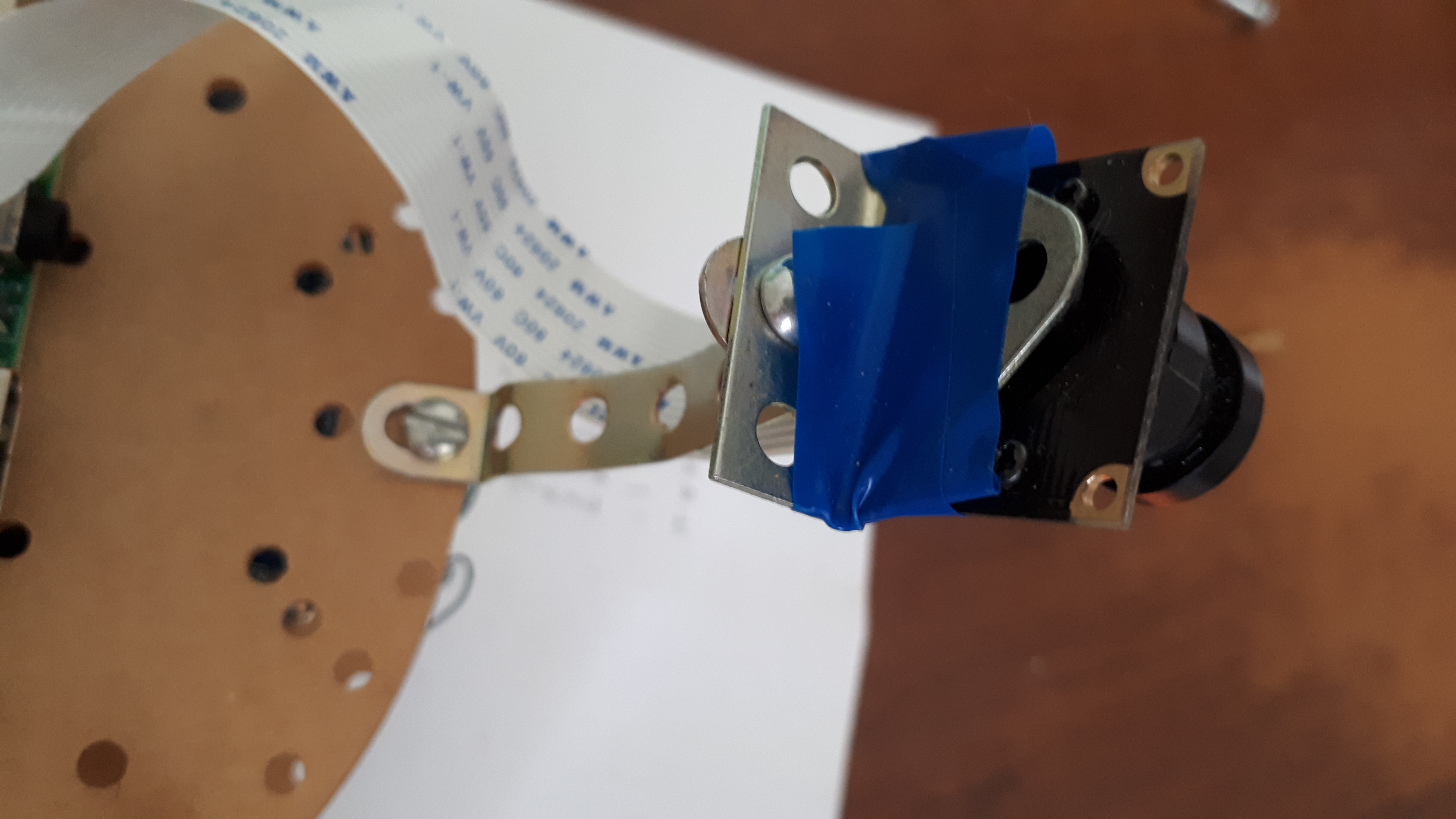
Hier befindet sich das Batteriefach, Himbeer-Pi, die Kamera auf den Details des sowjetischen Designers:
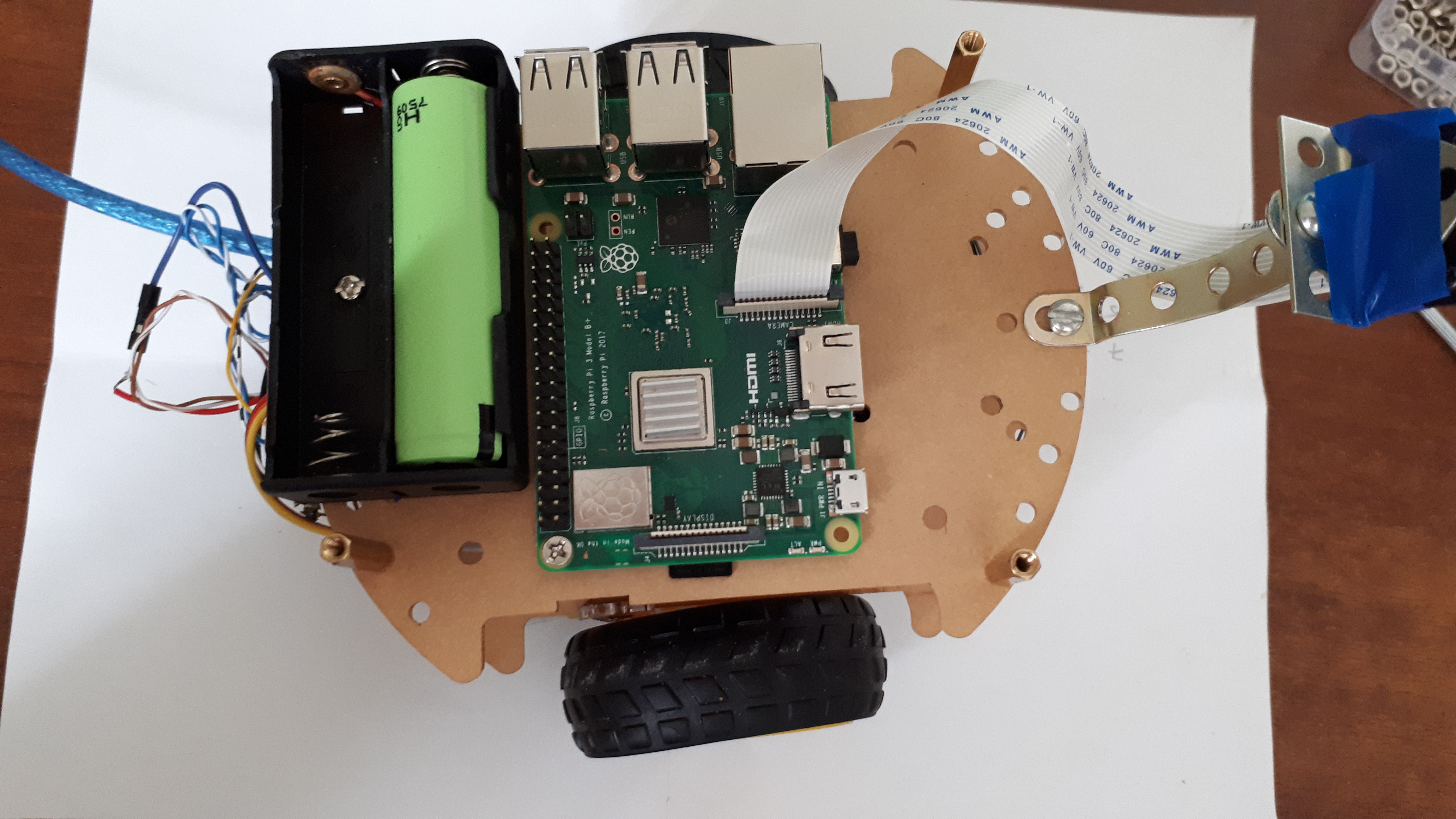
Vergessen Sie nicht, das Kabel von der Kamera richtig in Himbeere zu stecken:

Sowjetischer Designer in:
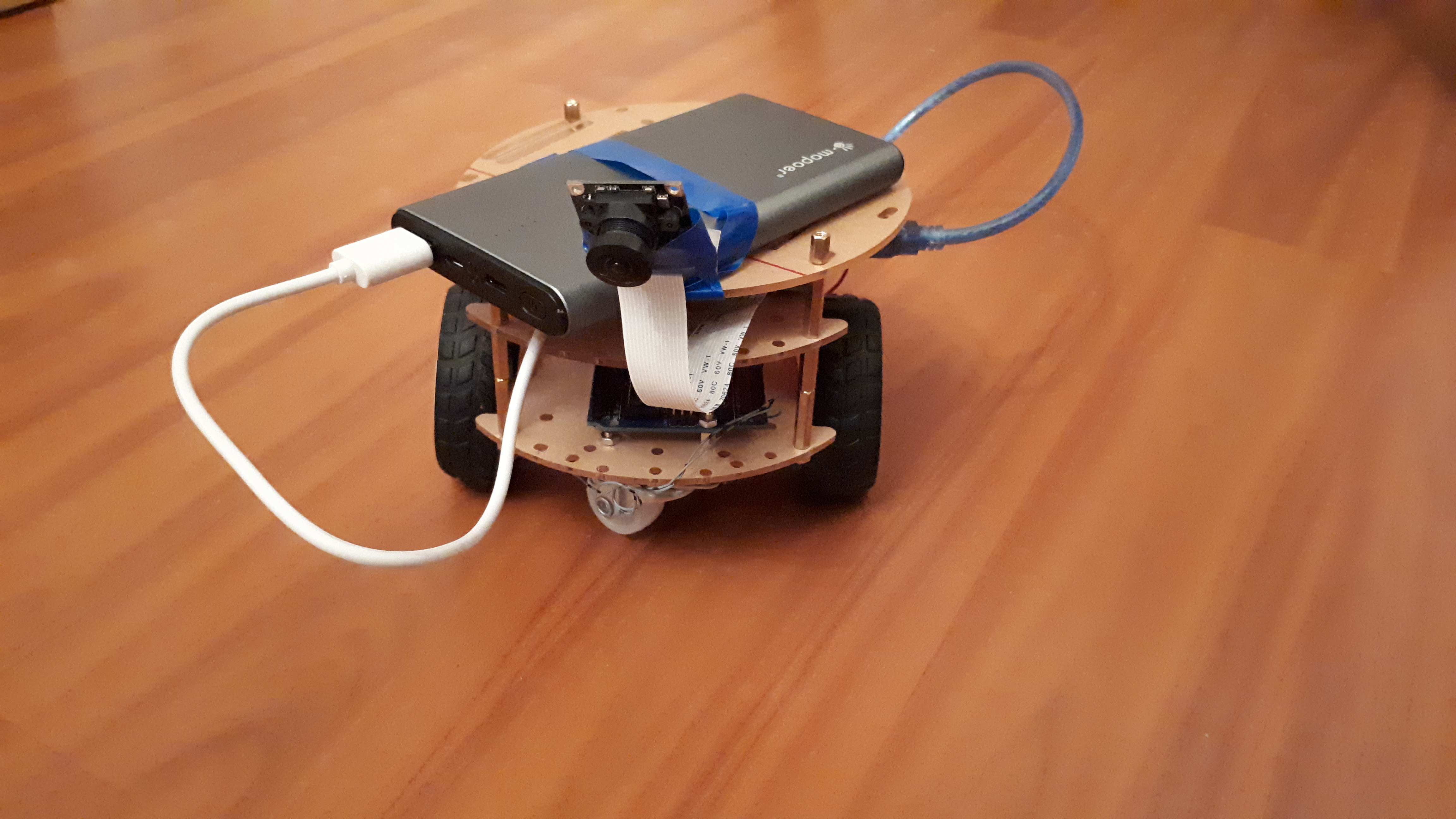
 Schließen Sie den Burger, die dritte Schicht des "Wagens"
Schließen Sie den Burger, die dritte Schicht des "Wagens" .
Hier wird eine Powerbank für Himbeere fahren:

* Ein bisschen über Powerbank, um Himbeer-Pi anzutreiben:
::
Alles, das Auto ist fertig!
In den folgenden Beiträgen werden wir direkt über ROS, Linien, Körper, Katzen und Lächeln sprechen.
Tipps und gnadenlose Kritik sind willkommen!
* Der Schaltplan wird aktualisiert.