 Hinweis 16. Juli 2019 Elon Musk stellte die Technologie vor, die einer der ersten ernsthaften Versuche war, Neurointerfaces in die klinische Praxis einzuführen und langfristig echte transhumane Ziele zu erreichen. Dieser Artikel ist eine Übersetzung mit einigen Anmerkungen des Originalartikels, der die Technologie der Neurocomputer-Schnittstelle beschreibt. Ein Link dazu wird auch auf der Website der Neuralink- Entwicklerfirma veröffentlicht. Der Artikel beschreibt die Merkmale und Eigenschaften der Hauptmodule, die dieser Technologie zugrunde liegen, einschließlich: flexibler biokompatibler Mikroelektroden, eines neurochirurgischen Robotermanipulators zum Einführen von Elektroden in das Gehirn sowie spezialisierter Mikroelektronik, die den Empfang, die Verstärkung und die Digitalisierung des Signals aus neuronaler Aktivität ermöglicht.
Hinweis 16. Juli 2019 Elon Musk stellte die Technologie vor, die einer der ersten ernsthaften Versuche war, Neurointerfaces in die klinische Praxis einzuführen und langfristig echte transhumane Ziele zu erreichen. Dieser Artikel ist eine Übersetzung mit einigen Anmerkungen des Originalartikels, der die Technologie der Neurocomputer-Schnittstelle beschreibt. Ein Link dazu wird auch auf der Website der Neuralink- Entwicklerfirma veröffentlicht. Der Artikel beschreibt die Merkmale und Eigenschaften der Hauptmodule, die dieser Technologie zugrunde liegen, einschließlich: flexibler biokompatibler Mikroelektroden, eines neurochirurgischen Robotermanipulators zum Einführen von Elektroden in das Gehirn sowie spezialisierter Mikroelektronik, die den Empfang, die Verstärkung und die Digitalisierung des Signals aus neuronaler Aktivität ermöglicht.Anmerkung
Neuro-Computer-Schnittstellen (BMI - Brain-Machine-Schnittstelle) bieten die Möglichkeit, die sensorische und motorische Funktion sowie die Behandlung neurologischer Störungen wiederherzustellen. Bisher hat der BMI jedoch noch keine breite klinische Verbreitung erhalten, was teilweise auf die unzureichende Anzahl von Kanälen zurückzuführen ist, die ihr Potenzial einschränkten. In diesem Whitepaper beschreiben wir die ersten Schritte von Neuralink in Richtung eines skalierbaren BMI-Breitbandsystems. Wir haben Arrays aus kleinen und flexiblen „Fäden“ erstellt - Elektroden, in denen bis zu 3072 Elektroden auf 96 Fäden verteilt sind. Wir haben auch einen neurochirurgischen Roboter entwickelt, der sechs Stränge (192 Elektroden) pro Minute implantieren kann. Jeder Faden kann einzeln mit einer Genauigkeit von Mikrometern in das Gehirn eingeführt werden, um eine Schädigung des oberflächlichen Gefäßnetzwerks zu vermeiden und ein Ziel in einem genau definierten Bereich des Gehirns zu erreichen. Die Elektrodenanordnung ist in einem kleinen implantierbaren Gerät verpackt, das spezielle Mikroschaltungen für die integrierte Verstärkung und Digitalisierung des Signals mit geringem Stromverbrauch enthält: Das Gehäuse für 3072 Kanäle hat Abmessungen von 23 × 18,5 × 2 mm und ein Volumen von 0,851 cm3. Ein USB-C-Kabel ermöglicht das Streaming von Daten von einem Gerät mit voller Bandbreite und gleichzeitiger Aufzeichnung von allen Kanälen. Bis zu 85,5% der implantierten Elektroden zeichneten direkt Peaks der Neuronenaktivität auf. Der BMI-Ansatz von Neuralink weist eine beispiellose Elektrodendichte und Skalierbarkeit auf und ermöglicht die klinische Verwendung in der Baugruppe.
1. Einleitung
Das Brain-Machine Interface (BMI) kann Menschen mit einer Vielzahl klinischer Störungen helfen. Zum Beispiel demonstrierten die Forscher die Fähigkeit zur Steuerung mit Computercursorn für Neuroprothetik [1, 2, 3], Robotergliedern [4, 5] und Sprachsynthesizern [6], wobei in all diesen Beispielen nicht mehr als 256 Elektroden verwendet wurden. Während diese Fortschritte darauf hindeuten, dass die Übertragung hochpräziser Informationen zwischen Gehirn und Maschinen möglich ist, wurde die Entwicklung des BMI durch die Unfähigkeit, Signale von einer großen Anzahl von Neuronen aufzuzeichnen, kritisch eingeschränkt. Nicht-invasive Ansätze können durchschnittlich Millionen von Neuronen durch den Schädel aufzeichnen, aber dieses Signal ist verzerrt und unspezifisch [7, 8]. Invasive Elektroden, die sich auf der Oberfläche des Kortex befinden, können nützliche Signale aufzeichnen, sind jedoch insofern begrenzt, als sie die Aktivität von Tausenden von Neuronen mitteln und keine Signale tief im Gehirn aufzeichnen können [9]. Die meisten BMIs verwenden invasive Methoden, da für das genaueste Ablesen neuronaler Repräsentationen die Aufzeichnung einzelner Neuronenaktionspotentiale in verteilten, funktional verwandten Ensembles erforderlich ist [10].
Mikroelektroden sind der Goldstandard der Technologie zur Aufzeichnung von Aktionspotentialen, aber bisher gab es keine klinisch entwickelte Mikroelektrodentechnologie, die skaliert werden könnte, um die Aktivität einer großen Anzahl von Neuronen aufzuzeichnen [11]. Dies erfordert ein System aus Materialien mit besonderen Eigenschaften, die eine hohe Biokompatibilität, Sicherheit und Haltbarkeit bieten. Darüber hinaus erfordert dieses Gerät auch einen praktischen chirurgischen Ansatz sowie elektronische Geräte mit geringer Leistung und hoher Dichte, um letztendlich eine vollständig drahtlose Implantatleistung bereitzustellen.
Die meisten Geräte für die neuronale Langzeitaufzeichnung sind Anordnungen von Elektroden aus Hartmetallen oder Halbleitern [12, 13, 14, 15, 16, 17, 18]. Während steife Metallgitter das Eindringen in das Gehirn erleichtern, können Größe, Elastizitätsmodul und Fehlanpassung der Biegesteifigkeit zwischen steifen Sonden und Gehirngewebe Immunantworten stimulieren, die die Funktion und Haltbarkeit dieser Geräte einschränken [19, 11]. Darüber hinaus begrenzt die feste Geometrie dieser Arrays die Populationen von Neuronen, auf die zugegriffen werden kann, insbesondere aufgrund des Vorhandenseins des Gefäßsystems.
Ein alternativer Ansatz ist die Verwendung dünner flexibler Mehrelektroden-Polymersonden [20, 21]. Die geringere Größe und erhöhte Flexibilität dieser Sonden sollte eine größere Biokompatibilität bieten. Der Nachteil dieses Ansatzes besteht jedoch darin, dass dünne Polymersonden nicht starr genug sind, um direkt in das Gehirn eingeführt zu werden. Ihre Einführung sollte mit Versteifungen [22, 21], Injektionen [23, 24] oder anderen Ansätzen [25] versehen sein, und alle sind eher langsam [26, 27]. Um die funktionalen Anforderungen für NQIs mit hoher Bandbreite unter Verwendung von Dünnschichtgeräten zu erfüllen, haben wir einen Roboteransatz entwickelt, bei dem eine große Anzahl dünner und flexibler Polymersonden effektiv und unabhängig in verschiedene Regionen des Gehirns eingeführt werden [28].
Hier berichten wir über die Fortschritte von Neuralink bei der Schaffung eines flexiblen, skalierbaren BMI, der die Anzahl der Kanäle im Vergleich zur vorherigen Arbeit um eine Größenordnung erhöht. Unser System besteht aus drei Hauptkomponenten: ultradünnen Polymersonden (Abschnitt 2 dieses Berichts), einem neurochirurgischen Roboter (Abschnitt 3) und einer speziellen Elektronik mit hoher Dichte (Abschnitt 4). Wir demonstrieren eine Technologie, die die schnelle Implantation von 96 Polymerfilamenten mit jeweils 32 Elektroden für insgesamt 3072 Elektroden ermöglicht.
Wir haben eine spezialisierte Miniaturelektronik entwickelt, mit der wir alle Daten der Breitbandelektrophysiologie gleichzeitig von all diesen Elektroden übertragen können (Abschnitt 5). Wir haben dieses System so verpackt, dass es langfristig implantiert werden kann, und eine spezielle Software zur Online-Erkennung von Neuronenaktivitätspeaks entwickelt, mit der Aktionspotentiale mit geringer Latenz erkannt werden können. Zusammen dient dieses System als moderne Forschungsplattform und als erster Prototyp einer vollständig implantierbaren menschlichen Neurocomputer-Schnittstelle.
2. Themen
 Abbildung 1
Abbildung 1 : Unsere neuen Polymersonden (Gewinde). A. Linearkantensonde mit 32 Elektrodenkontakten im Abstand von 50 Mikrometern. B. Eine "baumartige" Sonde mit 32 Elektrodenkontakten im Abstand von 75 Mikrometern. C. Größeres Bild der einzelnen Elektroden für Struktur A, wobei ihre kleine geometrische Oberfläche hervorgehoben wird. D. Elektrodenimpedanzverteilung (gemessen bei 1 kHz) für zwei Oberflächenbehandlungen: PEDOT (n = 257) und IrOx (n = 588).
Wir haben ein individuelles Verfahren zur Herstellung neuronaler Sonden mit einem Mindestabstand zwischen den Elektroden entwickelt, bei denen verschiedene biokompatible Dünnschichtmaterialien verwendet werden. Das in diesen Sonden verwendete Hauptsubstrat und Dielektrikum ist Polyimid, das einen dünnen Goldfilm bedeckt. Jede Dünnschichtmatrix besteht aus einem "Filament" -Bereich mit Kontakten, Elektrodenspuren und einem "Sensor" -Bereich, in dem ein Dünnfilm mit nicht standardmäßigen Mikroschaltungen verbunden ist, die Signalverstärkung und -empfang bereitstellen. Der Mikroproduktionsprozess auf Waferebene gewährleistet deren hohe Produktivität. Jede Platte ist mit zehn Dünnschichtgeräten beschichtet, die ein Signal von insgesamt 3072 Elektrodenkontakten empfangen.
An jedes Array sind 48 oder 96 Threads angeschlossen, von denen jedes wiederum 32 unabhängige Elektroden enthält. Die integrierten Schaltkreise werden über den Flip-Chip-Bonding-Prozess mit den Kontakten im Bereich des Dünnschichtsensors verbunden (Hinweis: https: //en.wikipedia.org/wiki/Flip_chip).
Eines der Ziele dieses Ansatzes ist es, die kleinstmögliche Querschnittsfläche des Fadens zu erreichen, um die Gewebeverschiebung im Gehirn zu minimieren. Um dies zu erreichen, werden unter Beibehaltung einer hohen Anzahl von Kanälen schrittweise Projektionslithographie und andere Mikroverarbeitungsverfahren verwendet, um einen Metallfilm mit einer Auflösung im Submikronbereich zu erhalten.
Wir haben über 20 verschiedene Arten von Filamenten und Elektroden für unsere Arrays entworfen und hergestellt. Zwei Konstruktionsbeispiele sind in den Feldern A und B in Abb. 1 dargestellt. 1. Wir haben Filamente mit einer Breite von 5 bis 50 Mikrometern hergestellt, die Aufnahmeorte mit mehreren Geometrien enthalten (Abb. 1). Die Dicke des Gewindes beträgt 4 bis 6 Mikrometer, einschließlich bis zu drei Isolationsschichten und zwei Leiterschichten. Die typische Garnlänge beträgt ca. 20 mm. Vor dem Einsetzen wird Parylen-C auf die Fäden aufgetragen, um einen Film zu bilden, auf dem die Fäden haften bleiben, bis der chirurgische Roboter sie entfernt. Jeder Faden endet mit einer Schlaufe (16 × 50) μm2, um das Einfädeln der Nadel zu ermöglichen.
Da einzelne Abschnitte der Goldelektrode kleine geometrische Oberflächen aufweisen (Abb. 1C), verwenden wir Oberflächenmodifikationen, um die Impedanz für die Elektrophysiologie zu verringern und die effektive Tragfähigkeit der Oberfläche zu erhöhen (Abb. 1D). Zwei dieser von uns verwendeten Behandlungen sind elektrisch leitfähiges Polymer Polyethylendioxythiophen, das mit Polystyrolsulfonat (PEDOT: PSS) [29, 30] und Iridiumoxid (IrOx) [31, 32] dotiert ist. Im Tischtest erreichten wir Impedanzen von 36,97 ± 4,68 kOhm (n = 257 Elektroden) und 56,46 ± 7,10 kOhm (n = 588) für PEDOT: PSS bzw. IrOx. Die niedrigere Impedanz von PEDOT: PSS ist vielversprechend, aber die Langzeitstabilität und Biokompatibilität von PEDOT: PSS ist weniger zuverlässig als für IrOx. Diese Verfahren und Verfahren können verbessert und auf andere Arten von leitfähigen Elektrodenmaterialien und Beschichtungen erweitert werden.
3. Neurochirurgischer Roboter
 Abbildung 2 : Größe der NPC-Patrone (Needle Pincher Cartridge) im Vergleich zu einer Penny-Münze.
Abbildung 2 : Größe der NPC-Patrone (Needle Pincher Cartridge) im Vergleich zu einer Penny-Münze.Dünnschichtpolymere wurden früher für Elektrodensonden verwendet [21], aber ihre geringe Biegesteifigkeit erschwerte den Einführvorgang. Neuralink hat einen Ansatz mit dem Robotereinführen flexibler Sonden entwickelt [28], der das schnelle und zuverlässige Einführen einer großen Anzahl von Polymersonden ermöglicht, um eine Schädigung des Gefäßsystems und Aufzeichnungen aus kleinen Bereichen des Gehirns zu verhindern. Der Injektionskopf des Roboters wird mit einer Genauigkeit von 10 Mikrometern auf einer dreiachsigen Plattform von 400 mm × 400 mm × 150 mm positioniert und enthält eine kleine, schnell austauschbare „Nadelhalter“ -Baugruppe (Abb. 2, Abb. 3A).
Die Nadel wird aus einem Wolfram-Rhenium-Draht mit einem Durchmesser von 40 & mgr; m gefräst und durch elektrochemisches Ätzen wird ihr Durchmesser entlang der eingegebenen Länge auf 24 & mgr; m reduziert (2A). Die Nadelspitze dient zum Einführen von Schlaufen zum Einführen - zum Transportieren und Einführen einzelner Fäden - und zum Eindringen in die Hirnhäute und das Gehirngewebe. Die Nadel wird von einem Linearmotor angetrieben, der eine variable Eingangsgeschwindigkeit und eine schnelle Rückzugsbeschleunigung (bis zu 30.000 mm s –2) bietet, um die Trennung von Sonde und Nadel zu erleichtern. Der Pincher ist ein Wolframdraht mit einem Durchmesser von 50 μm, der an der Spitze gebogen ist und sowohl in axialer als auch in Drehrichtung angetrieben wird (Abb. 2B). Es dient als Unterstützung für die Sonden während des Transports und als Führung, um sicherzustellen, dass die Fäden entlang des Nadelwegs eingeführt werden. Fig. 4 zeigt eine Folge von Fotografien des Prozesses des Einführens von Strängen in eine agare Simulation von Gehirngewebe.
 3
3 : Robotervorrichtung zum Einführen von Elektroden; Eine vergrößerte Ansicht des Eingangskopfs ist im Einschub dargestellt. A. Beladener Nadelhalter. B. Kontaktsensor der Gehirnposition mit geringem Aufprall. C. Lichtmodule mit mehreren unabhängigen Wellenlängen. D. Nadelmotor. E. Eine von vier Kameras, die beim Einführen auf die Nadel fokussieren. F. Kamera mit einem weiten Betrachtungswinkel des Operationsfeldes. G. Stereoskopische Kameras.
Der Kopf der Robotervorrichtung zum Einführen von Fäden verfügt auch über einen Stapel von Kameras zum Erfassen von Bildern (Abb. 3E-G), mit denen die Nadel in die Schleife des Fadens geführt, vor dem Betreten gerichtet, die Eingabe in Echtzeit angezeigt und überprüft wird. Zusätzlich enthält der Kopf der Vorrichtung sechs unabhängige Lichtmodule, von denen jedes unabhängig mit einer Wellenlänge von 405 nm, 525 nm und 650 nm oder weißem Licht beleuchten kann (Fig. 3C). Die Beleuchtung bei 405 nm regt die Fluoreszenz von Polyimid an und ermöglicht es dem optischen Stapel und der Bildverarbeitung, eine 16 × 50 μm2-Filamentschleife zuverlässig zu lokalisieren und eine visuelle Submikron-Servosteuerung durchzuführen, um eine lichtgeführte 650-nm-Nadel durch die Schleife zu lenken. Stereoskopische Kameras, monokulare Softwareberechnungen mit erweiterter Schärfentiefe und 525-nm-Lichtbeleuchtung ermöglichen die genaue Beurteilung der Position eines Teils der Oberfläche der Großhirnrinde.
Der Roboter registriert Positionen in einem gemeinsamen Koordinatengitter auf dem Schädel, das in Kombination mit der Tiefenverfolgung genau auf anatomisch definierte Gehirnstrukturen abzielt. Mit einem integrierten benutzerdefinierten Softwarepaket können Sie alle Einfügepunkte vorab auswählen und so den Einfügepfad planen, Verwirrung und Belastung für jeden Thread minimieren. Eine der wichtigsten Planungsfunktionen ist die Fähigkeit, eine Schädigung des Gefäßnetzwerks während des Einführens zu vermeiden. Dies ist einer der Hauptvorteile des separaten Einführens der Elektroden. Dies ist besonders wichtig, da angenommen wird, dass eine Schädigung der Blut-Hirn-Schranke eine Schlüsselrolle bei der Entzündungsreaktion des Gehirns auf Fremdkörper spielt [33].
Der Roboter verfügt über einen automatischen Einführmodus, mit dem Sie bis zu 6 Fäden (192 Elektroden) pro Minute einführen können. Trotz der Tatsache, dass der gesamte Injektionsvorgang automatisiert werden kann, behält der Chirurg die volle Kontrolle und kann, falls gewünscht, vor jeder Einführung in die Kortikalis eine manuelle Mikroeinstellung der Position des Fadens vornehmen. Der neurochirurgische Roboter ist mit einem sterilen Gehäuse kompatibel und verfügt über Funktionen, die erfolgreiche und schnelle Injektionen ermöglichen, wie z. B. die automatische Ultraschall-Nadelsterilisation. Die Nadelhalterpatrone (NPC; Abbildung 2C) ist der Teil des Einsatzkopfs, der in direktem Kontakt mit dem Gehirngewebe steht und ein Verbrauchsartikel ist, der während der Operation in weniger als einer Minute ausgetauscht werden kann.
 Abbildung 4
Abbildung 4 : 1. Ein Gerät zur Eingabe mit einem Thread, der sich der Simulation von Gehirngewebe nähert. ich. Nadel und Kanüle (Hinweis: Hohlnadel). ii. zuvor eingefügter Thread. 2. Der Einsatz berührt die Oberfläche und simuliert das Gehirngewebe. 3. Die Nadel dringt in das Nachahmungsgewebe ein und liefert den Faden bis zu einer vorbestimmten Tiefe. iii. Gewindeeinführung. 4. Das Fadeneingabegerät fährt ab und belässt den Faden im Stoff. iv. implantierter Faden.
Mit diesem System konnten wir den Erfolg der Verabreichung in 87,1 ± 12,6% der Fälle (Mittelwert ± Standardabweichung) nach 19 Operationen nachweisen. Während der Studie wurden genaue manuelle Anpassungen vorgenommen, um eine Beschädigung der Mikrovaskulatur der Kanäle auf der Oberfläche des Kortex zu vermeiden, was die Gesamtverabreichungszeit von der schnellsten verlängerte. Selbst unter Berücksichtigung dieser Korrekturen betrug die Gesamtverabreichungszeit für diese Studie durchschnittlich ~ 45 Minuten bei einer ungefähren Einführungsrate von 29,6 Elektroden pro Minute (Abb. 6). Die Einführung wurde mit bilateraler Kraniotomie von Stellen mit einer Fläche von (4 × 7) mm2 mit einem Intervall> 300 μm zwischen den Filamenten durchgeführt, um die kortikale Abdeckung zu maximieren. Dies zeigt, dass das robotergesteuerte Einsetzen dünner Polymerelektroden ein effektiver und skalierbarer Ansatz zur Aufzeichnung der Aktivität einer großen Anzahl von Neuronen in anatomisch definierten Bereichen des Gehirns ist.
4. Elektronik
Die kontinuierliche Aufzeichnung von Signalen von Tausenden von Elektroden ist mit erheblichen Problemen bei Elektronik und Verpackung verbunden. Die Dichte der Aufzeichnungskanäle erfordert die Platzierung des Verstärkungsmoduls und die Digitalisierung des Signals in der Baugruppe des Geräts selbst, da sonst die Anforderungen an Kabel und Stecker zu hoch sind. Dieses Aufzeichnungsmodul sollte schwache neuronale Signale (<10 μVRMS) verstärken, gleichzeitig Out-of-Band-Rauschen unterdrücken, verstärkte Signale abtasten und digitalisieren sowie Ergebnisse für die Echtzeitverarbeitung ausgeben - alles mit der kleinstmöglichen Leistung und Größe.
Die Elektronik basiert auf unserer speziellen integrierten Schaltung (ASIC) für Neuralink-Anwendungen, die aus 256 einzeln programmierbaren Verstärkern („analogen Pixeln“), eingebauten Analog-Digital-Wandlern (ADCs) und einer peripheren Steuerschaltung zur Serialisierung digitalisierter Ausgangssignale besteht.
Das analoge Pixel ist leicht einstellbar: Verstärkungs- und Filtereigenschaften können kalibriert werden, um Änderungen der Signalqualität aufgrund von Prozessvariabilität und elektrophysiologischer Umgebung zu berücksichtigen.
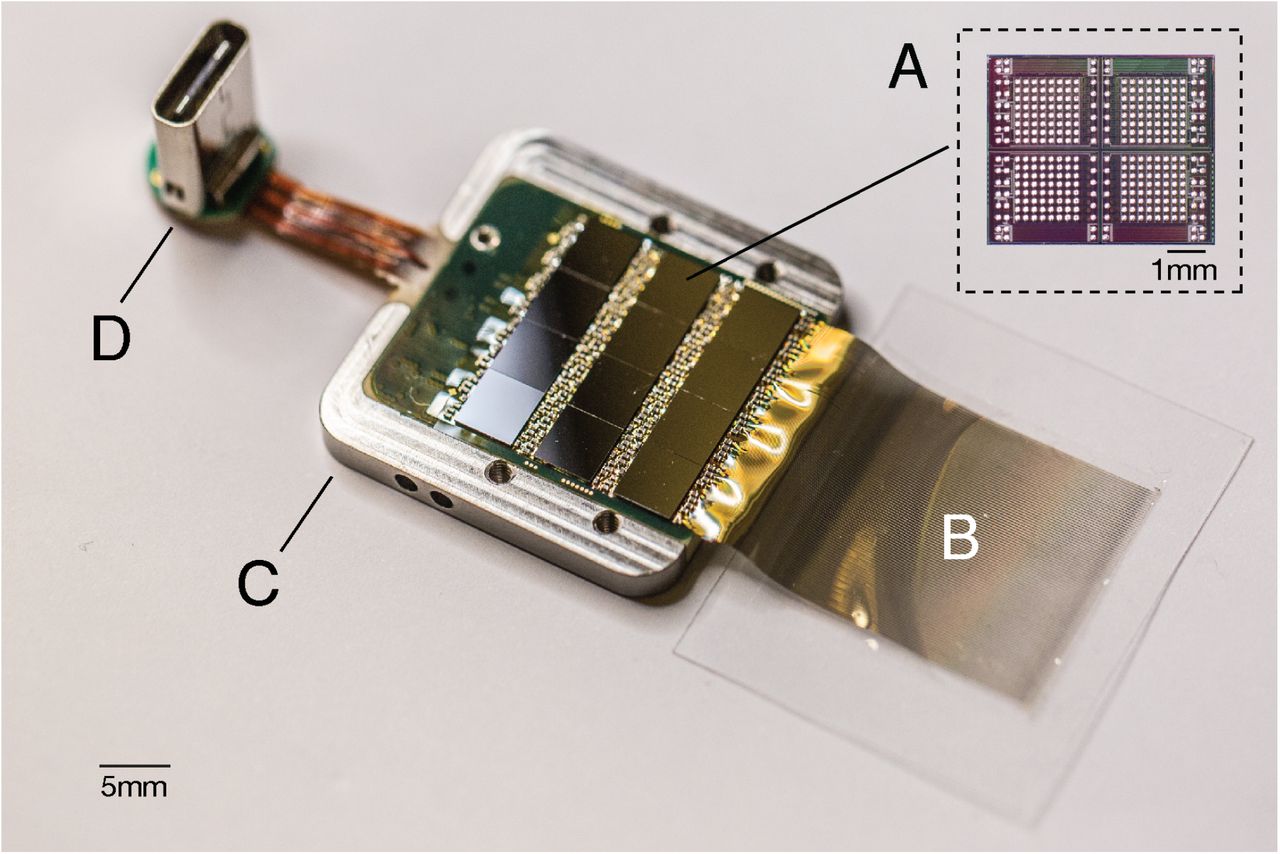
Der eingebaute ADC führt eine Abtastung mit einer Frequenz von 19,3 kHz mit einer Auflösung von 10 Bit durch. Jedes analoge Pixel verbraucht 5,2 μW, und der gesamte ASIC verbraucht etwa 6 mW, einschließlich der Takttreiber. Die Eigenschaften von ASIC Neuralink sind in Tabelle 1 gezeigt, und eine Fotografie des hergestellten Geräts ist in Fig. 1 gezeigt. 5A. Abbildung 5 : Touch-Gerät in der Verpackung. A. Jeder einzelne Chip in einem ASIC kann 256 Datenkanäle verarbeiten. Die gesamte Gerätebaugruppe enthält 12 solcher Chips, was insgesamt 3072 Kanälen entspricht. B. Polymergarne auf Parylenbasis. C. Titangehäuse (Abdeckung entfernt). D. Digitaler USB-C-Anschluss für Strom- und Datenübertragung.Neuralink ASIC ist der Kern einer modularen Aufzeichnungsplattform, mit der Komponenten für Forschung und Entwicklung einfach ausgetauscht werden können (Abb. 5). In den hier diskutierten Systemen werden mehrere ASICs unter Verwendung des Flip-Chip-Verbindungsverfahrens in eine Standard-Leiterplatte (PCB) integriert. Jedes System besteht aus einem vom Benutzer programmierbaren Gate-Array (ca. FPGA); Temperatursensoren, Beschleunigungsmesser, Magnetometer in Echtzeit und ein USB-C-Anschluss für die Datenübertragung mit voller Bandbreite. Die Systeme sind in Titangehäusen verpackt, die mit C-Parylen beschichtet sind, das als Feuchtigkeitsbarriere dient, um das Eindringen von Flüssigkeit zu verhindern und die Lebensdauer zu verlängern.In Tabelle 2 haben wir die erstellten Konfigurationen beschrieben: das Aufzeichnungssystem auf 1536 Kanälen (System A) und das Aufzeichnungssystem auf 3072 Kanälen (System B). Während System A den ASIC Neuralink der aktuellen Generation verwendet, verwendet System B das frühere Version mit vergleichbarer Funktionalität, aber mit geringeren Leistungsmerkmalen. System B wurde zur Maximierung der Kanaldichte entwickelt und wird für Anwendungen verwendet, die eine extrem große Anzahl von Kanälen erfordern. Im Gegensatz dazu wurde System A entwickelt, um eine schnellere und zuverlässigere Installation zu ermöglichen. Es kann fünfmal schneller installiert werden als System B, was effizienter ist.
Abbildung 5 : Touch-Gerät in der Verpackung. A. Jeder einzelne Chip in einem ASIC kann 256 Datenkanäle verarbeiten. Die gesamte Gerätebaugruppe enthält 12 solcher Chips, was insgesamt 3072 Kanälen entspricht. B. Polymergarne auf Parylenbasis. C. Titangehäuse (Abdeckung entfernt). D. Digitaler USB-C-Anschluss für Strom- und Datenübertragung.Neuralink ASIC ist der Kern einer modularen Aufzeichnungsplattform, mit der Komponenten für Forschung und Entwicklung einfach ausgetauscht werden können (Abb. 5). In den hier diskutierten Systemen werden mehrere ASICs unter Verwendung des Flip-Chip-Verbindungsverfahrens in eine Standard-Leiterplatte (PCB) integriert. Jedes System besteht aus einem vom Benutzer programmierbaren Gate-Array (ca. FPGA); Temperatursensoren, Beschleunigungsmesser, Magnetometer in Echtzeit und ein USB-C-Anschluss für die Datenübertragung mit voller Bandbreite. Die Systeme sind in Titangehäusen verpackt, die mit C-Parylen beschichtet sind, das als Feuchtigkeitsbarriere dient, um das Eindringen von Flüssigkeit zu verhindern und die Lebensdauer zu verlängern.In Tabelle 2 haben wir die erstellten Konfigurationen beschrieben: das Aufzeichnungssystem auf 1536 Kanälen (System A) und das Aufzeichnungssystem auf 3072 Kanälen (System B). Während System A den ASIC Neuralink der aktuellen Generation verwendet, verwendet System B das frühere Version mit vergleichbarer Funktionalität, aber mit geringeren Leistungsmerkmalen. System B wurde zur Maximierung der Kanaldichte entwickelt und wird für Anwendungen verwendet, die eine extrem große Anzahl von Kanälen erfordern. Im Gegensatz dazu wurde System A entwickelt, um eine schnellere und zuverlässigere Installation zu ermöglichen. Es kann fünfmal schneller installiert werden als System B, was effizienter ist.
 Eine mit einem lokalen Ethernet-Netzwerk verbundene Basisstation konvertiert Datenströme von diesen Systemen in 10G-Ethernet-Multicast-Pakete, mit denen nachfolgende Benutzer Daten auf verschiedene Weise verarbeiten können, z. B. Echtzeit-Datenvisualisierung [34] oder Aufzeichnung auf Festplatte. Jede Basisstation kann bis zu drei Implantate gleichzeitig verbinden. Die Geräte werden zusätzlich von einem Software-Ökosystem unterstützt, das eine einfache Bedienung nach dem Prinzip „Plug and Play“ ohne Konfiguration bietet: Der Datenstrom wird automatisch aktiviert, wenn das Kabel angeschlossen wird.
Eine mit einem lokalen Ethernet-Netzwerk verbundene Basisstation konvertiert Datenströme von diesen Systemen in 10G-Ethernet-Multicast-Pakete, mit denen nachfolgende Benutzer Daten auf verschiedene Weise verarbeiten können, z. B. Echtzeit-Datenvisualisierung [34] oder Aufzeichnung auf Festplatte. Jede Basisstation kann bis zu drei Implantate gleichzeitig verbinden. Die Geräte werden zusätzlich von einem Software-Ökosystem unterstützt, das eine einfache Bedienung nach dem Prinzip „Plug and Play“ ohne Konfiguration bietet: Der Datenstrom wird automatisch aktiviert, wenn das Kabel angeschlossen wird.5. Elektrophysiologie
Wir implantierten beide Systeme A und B männlichen Long-Evans-Ratten, wie in Abschnitt 3 beschrieben. Alle Tierverfahren wurden gemäß den Richtlinien des Nationalen Forschungsrats für die Pflege und Verwendung von Labortieren durchgeführt und vom Neuralink Animal Care and Use Committee genehmigt. Elektrophysiologische Aufzeichnungen wurden gemacht, als Tiere eine Arena frei erkundeten, die mit einem Kabel ausgestattet war, das unbegrenzte Bewegung ermöglichte. System A kann 1344 von 1536 Kanälen gleichzeitig aufnehmen, die genaue Konfiguration des Kanals kann während der Aufnahme willkürlich festgelegt werden; System B kann von allen 3072 Kanälen gleichzeitig aufnehmen. Die digitalisierten Breitbandsignale wurden in Echtzeit verarbeitet, um die Aktionspotentiale von Neuronen (Peaks) unter Verwendung des Online-Erkennungsalgorithmus zu bestimmen. Abbildung 6 : Implantation und Montage des Gewindes. A. Ein Beispiel für ein Livebild, das die Oberfläche der Kortikalis mit implantierten Fäden und minimalen Blutungen zeigt. B. Sensoranordnung („System B“), dauerhaft in die Ratte implantiert.Die Anforderungen an die Echtzeit-Peakerkennung für NQR unterscheiden sich von den meisten herkömmlichen neurophysiologischen Studien. Während die meisten Elektrophysiologen Daten offline schalten und erhebliche Anstrengungen unternehmen, um falsch positive Spitzenereignisse zurückzuweisen, sollten NQI-Ereignisse in Echtzeit erkannt werden und Spitzenerkennungsparameter sollten die Decodierungsleistung maximieren. Unter Verwendung unserer speziellen Online-Peakerkennungssoftware haben wir festgestellt, dass ein Auflösungsfilter, der falsch positive Ergebnisse von ± 0,2 Hz zulässt, besser ist als die Festlegung strenger Schwellenwerte, mit denen echte Peaks zurückgewiesen werden können (Daten nicht gezeigt).Angesichts dieser Überlegungen legen wir einen Schwellenwert von> 0,35 Hz fest, um die Anzahl der Elektroden zu bestimmen, die Peaks aufgezeichnet haben. Da wir Daten normalerweise nicht nach Peaks sortieren, melden wir nicht mehrere Einheiten pro Kanal. BMI-Decoder arbeiten normalerweise ohne Sortierung mit minimalem Leistungsverlust [36, 37]. Darüber hinaus zeigen neuere Ergebnisse, dass eine Peaksortierung für eine genaue Beurteilung der Dynamik einer neuronalen Population nicht erforderlich ist [38].Die Daten eines kürzlich durchgeführten Experiments unter Verwendung von System A sind in Fig. 4 gezeigt. 7 und Abb. 8. In diesem Experiment waren 40 von 44 Insertionsversuchen erfolgreich (90%) für insgesamt 1280 implantierte Elektroden, von denen 1020 gleichzeitig aufgezeichnet wurden. Von den vorgestellten Filamenten aufgezeichnete Breitbandsignale zeigen sowohl lokale Potentiale als auch Spitzenaktivität von Fig. 7. Ein Beispiel für die Ausgabe des Peak-Detektionssystems ist in Abb. 1 als Raster dargestellt. In diesem Beispiel wurden zwei überlappende Aufzeichnungskonfigurationen verwendet, um von allen 1.280 implantierten Kanälen aufzuzeichnen. Bei diesem Array betrug unsere Peakausbeute 53,4% der Kanäle, und viele Peaks traten auf mehreren benachbarten Kanälen auf, wie in anderen Experimenten mit einer hohen Elektrodendichte beobachtet wurde [16, 17, 21]. Auf anderen Arrays von System A erhielten wir ein Ergebnis von 59,10 ± 5,74% (Mittelwert ± Standardfehler des Mittelwerts) in 19 Operationen mit maximal 85,5%.
Abbildung 6 : Implantation und Montage des Gewindes. A. Ein Beispiel für ein Livebild, das die Oberfläche der Kortikalis mit implantierten Fäden und minimalen Blutungen zeigt. B. Sensoranordnung („System B“), dauerhaft in die Ratte implantiert.Die Anforderungen an die Echtzeit-Peakerkennung für NQR unterscheiden sich von den meisten herkömmlichen neurophysiologischen Studien. Während die meisten Elektrophysiologen Daten offline schalten und erhebliche Anstrengungen unternehmen, um falsch positive Spitzenereignisse zurückzuweisen, sollten NQI-Ereignisse in Echtzeit erkannt werden und Spitzenerkennungsparameter sollten die Decodierungsleistung maximieren. Unter Verwendung unserer speziellen Online-Peakerkennungssoftware haben wir festgestellt, dass ein Auflösungsfilter, der falsch positive Ergebnisse von ± 0,2 Hz zulässt, besser ist als die Festlegung strenger Schwellenwerte, mit denen echte Peaks zurückgewiesen werden können (Daten nicht gezeigt).Angesichts dieser Überlegungen legen wir einen Schwellenwert von> 0,35 Hz fest, um die Anzahl der Elektroden zu bestimmen, die Peaks aufgezeichnet haben. Da wir Daten normalerweise nicht nach Peaks sortieren, melden wir nicht mehrere Einheiten pro Kanal. BMI-Decoder arbeiten normalerweise ohne Sortierung mit minimalem Leistungsverlust [36, 37]. Darüber hinaus zeigen neuere Ergebnisse, dass eine Peaksortierung für eine genaue Beurteilung der Dynamik einer neuronalen Population nicht erforderlich ist [38].Die Daten eines kürzlich durchgeführten Experiments unter Verwendung von System A sind in Fig. 4 gezeigt. 7 und Abb. 8. In diesem Experiment waren 40 von 44 Insertionsversuchen erfolgreich (90%) für insgesamt 1280 implantierte Elektroden, von denen 1020 gleichzeitig aufgezeichnet wurden. Von den vorgestellten Filamenten aufgezeichnete Breitbandsignale zeigen sowohl lokale Potentiale als auch Spitzenaktivität von Fig. 7. Ein Beispiel für die Ausgabe des Peak-Detektionssystems ist in Abb. 1 als Raster dargestellt. In diesem Beispiel wurden zwei überlappende Aufzeichnungskonfigurationen verwendet, um von allen 1.280 implantierten Kanälen aufzuzeichnen. Bei diesem Array betrug unsere Peakausbeute 53,4% der Kanäle, und viele Peaks traten auf mehreren benachbarten Kanälen auf, wie in anderen Experimenten mit einer hohen Elektrodendichte beobachtet wurde [16, 17, 21]. Auf anderen Arrays von System A erhielten wir ein Ergebnis von 59,10 ± 5,74% (Mittelwert ± Standardfehler des Mittelwerts) in 19 Operationen mit maximal 85,5%. Abbildung 7 : Links: Breitbandige neuronale Signale (ungefiltert), die gleichzeitig von einem Strang (32 Kanäle) erhalten wurden, der in die Hirnrinde der Ratte implantiert wurde. Jeder Kanal (Reihe) entspricht einem Teil der Elektrode auf dem Filament (Diagramm links; Abschnitte mit einem Abstand von 50 μm). Spitzen und lokale Feldpotentiale sind offensichtlich. Rechts: prospektive Wellenformen (unsortiert); Zahlen geben die Position des Kanals im Stream an. Die mittlere Wellenform ist schwarz dargestellt.
Abbildung 7 : Links: Breitbandige neuronale Signale (ungefiltert), die gleichzeitig von einem Strang (32 Kanäle) erhalten wurden, der in die Hirnrinde der Ratte implantiert wurde. Jeder Kanal (Reihe) entspricht einem Teil der Elektrode auf dem Filament (Diagramm links; Abschnitte mit einem Abstand von 50 μm). Spitzen und lokale Feldpotentiale sind offensichtlich. Rechts: prospektive Wellenformen (unsortiert); Zahlen geben die Position des Kanals im Stream an. Die mittlere Wellenform ist schwarz dargestellt.6. Diskussion
Wir haben ein NIR mit einer hohen Anzahl von Kanälen und einer Auflösung von einem Peak beschrieben. Es basiert auf flexiblen Polymersensoren, einem Robotereingabesystem und einer speziellen Elektronik mit geringem Stromverbrauch. Dieses System dient zwei Hauptzwecken: Es ist eine Forschungsplattform für Nagetiere und dient als Prototyp für zukünftige klinische Implantate beim Menschen. Durch die Möglichkeit, Strukturen schnell zu iterieren und Nagetiere zu testen, können Sie Geräte, Produktionsprozesse und Software schnell verbessern. Da es sich um eine Forschungsplattform handelt, verwendet das System eine Kabelverbindung, um den Durchsatz für das Streaming von Rohdaten zu maximieren. Dies ist wichtig für die Bewertung der Leistung und für die Entwicklung von Signalverarbeitungs- und Decodierungsalgorithmen. Im Gegensatz dazuDie klinischen Geräte, die auf dieser Plattform hergestellt werden, sind vollständig implantierbar, was eine hermetische Verpackung erfordert. Sie verfügen über eine integrierte Signalkomprimierung, einen reduzierten Stromverbrauch, eine drahtlose Energieübertragung und eine Telemetrie von Daten durch die Haut ohne Verwendung von Kabeln. Abbildung 8 : Unsere Geräte ermöglichen die Erkennung einer weit verbreiteten neuronalen Aktivität, die auf mehrere Bereiche des Gehirns und der kortikalen Schichten verteilt ist. Links: Die Injektionsstellen (farbige Kreise) sind auf dem Bild des Nagetiergehirns angegeben. [35] Rechts: Raster von 1020 gleichzeitig aufgezeichneten Kanälen, sortiert nach Streams (Farbe entspricht der Einfügemarke). Seitenleiste: Ein vergrößertes Bild von Peaks aus einem Thread. Dieser Thread entspricht dem in Abb.
Abbildung 8 : Unsere Geräte ermöglichen die Erkennung einer weit verbreiteten neuronalen Aktivität, die auf mehrere Bereiche des Gehirns und der kortikalen Schichten verteilt ist. Links: Die Injektionsstellen (farbige Kreise) sind auf dem Bild des Nagetiergehirns angegeben. [35] Rechts: Raster von 1020 gleichzeitig aufgezeichneten Kanälen, sortiert nach Streams (Farbe entspricht der Einfügemarke). Seitenleiste: Ein vergrößertes Bild von Peaks aus einem Thread. Dieser Thread entspricht dem in Abb. 7.
Die Modulation der neuronalen Aktivität wird ein wichtiger Bestandteil der klinischen Schnittstelle zwischen Gehirn und Maschine der nächsten Generation sein [39], um beispielsweise einen Tastsinn oder eine Propriozeption für die Steuerung neuroprothetischer Bewegungen bereitzustellen [40, 41]. Aus diesem Grund haben wir einen ASIC-Neuralink entwickelt, der auf jedem Kanal elektrisch stimulieren kann, obwohl wir diese Fähigkeiten hier nicht demonstriert haben.Dieses NQI-System hat gegenüber früheren Ansätzen mehrere Vorteile. Die Größe und Zusammensetzung von Dünnschichtsonden sind besser für die Eigenschaften von Hirngewebematerial geeignet als üblicherweise verwendete Siliziumsonden und können daher eine erhöhte Biokompatibilität aufweisen [28, 21]. Die Möglichkeit zu wählen, wo unsere Sonden eingesetzt werden sollen, einschließlich in die subkortikalen Strukturen, ermöglicht es uns außerdem, unsere eigenen Geometrien von Arrays zu erstellen, um auf bestimmte Bereiche des Gehirns abzuzielen, ohne die Gefäßnetzwerke zu beschädigen. Diese Funktion ist wichtig für die Erstellung eines Hochleistungs-NKI, da die Verteilung der Elektroden je nach den Anforderungen der Aufgabe angepasst werden kann. EndlichDie Miniaturisierung und das Design von Neuralink ASIC bieten große Flexibilität beim Systemdesign und unterstützen eine sehr hohe Anzahl von Kanälen bei praktischer Größe und geringem Stromverbrauch.Grundsätzlich ist unser Ansatz für Gehirn-Maschine-Schnittstellen erweiterbar und skalierbar. Hier berichten wir über die gleichzeitige Breitbandaufzeichnung von mehr als 3.000 eingeführten Elektroden bei einer frei beweglichen Ratte. In einem größeren Gehirn können mehrere Geräte mit dieser Architektur leicht implantiert werden, und daher könnten wir ohne ernsthaftes Reengineering mit einer viel größeren Anzahl von Neuronen interagieren. Durch die Weiterentwicklung der chirurgischen Robotik können wir dies auf die gleiche Weise erreichen, ohne die Operationszeit wesentlich zu verlängern.Bevor ein Gerät mit hoher Bandbreite für den klinischen Einsatz geeignet wird, muss eine Reihe schwerwiegender technologischer Probleme gelöst werden. Jetzt ist es leicht vorstellbar, dass mit einem solchen Gerät Patienten mit Rückenmarksverletzungen eine digitale Maus und Tastatur geschickt steuern können. In Kombination mit sich schnell verbessernden Methoden der Rückenmarkstimulation [42] könnte dieser Ansatz in Zukunft die motorische Funktion wiederherstellen. Neuronale Schnittstellen mit hohem Durchsatz müssen viele neue therapeutische Optionen bieten.7. Danksagung
Wir möchten uns bei Livermore National Laboratory bedanken. Lawrence (LLNL), Berkeley Marvell Nanotechnologielabor, Berkeley Wireless Research Center (BWRC), Stanford Nanotechnology Center und ehemalige und aktuelle Neuralink-Mitarbeiter für ihre Beiträge zu der hier beschriebenen Arbeit.8. Zusätzliche Videos
Video 1 : Eine Serie von sechs Einsätzen eines neurochirurgischen Roboters in einer Agarose-Imitation von Hirngewebe. Das Einfangen des Fadens durch eine Nadel erfolgt außerhalb des Rahmens. Änderungen der Hintergrundfarbe werden durch Beleuchtung mit unterschiedlichen Lichtfrequenzen in verschiedenen Phasen des Abricht- und Einführvorgangs verursacht. Ein Thread wurde vor dem Start des Videos eingefügt. Video .Video 2 : Dreidimensionale Visualisierung des Fadenimplantationsprozesses (gleiche Daten wie in Abb. 8). Der Thread-Einsatz wird in der gleichen Reihenfolge wie im realen Betrieb angezeigt, jedoch im Schnellwiedergabemodus. Gewindegröße und Einstecktiefe sind typisch. Die stereotaktischen Koordinaten jedes Inserts werden in einem Datensatz dargestellt, der von Calabrese et al. Bereitgestellt wurde [35]. Video .9. Quellen[1] Leigh R. Hochberg et al. "Neuronale Ensemble-Kontrolle von Prothesen durch einen Menschen mit Tetraplegie." In: Nature 442 (2006), p. 164. issn: 1476-4687.
[2] Wei Wang et al. "Eine elektrokortikographische Gehirnschnittstelle bei einer Person mit Tetraplegie." In: PLoS ONE 8 (2013), e55344.
[3] Tyson Aflalo et al. "Entschlüsselung motorischer Bilder aus dem hinteren parietalen Kortex eines tetraplegischen Menschen." In: Science 348 (2015), pp. 906–910. Ausgabe: 0036-8075.
[4] Leigh R. Hochberg et al. "Menschen mit Tetraplegie mit einem neuronal gesteuerten Roboterarm erreichen und erfassen." In: Nature 485 (2012), p. 372. issn: 1476-4687.
[5] Jennifer L. Collinger et al. "Hochleistungs-neuroprothetische Kontrolle durch eine Person mit Tetraplegie." In: The Lancet 381 (2013), pp. 557-564. Ausgabe: 0140-6736.
[6] Gopala K. Anumanchipalli, Josh Chartier und Edward F. Chang. "Sprachsynthese aus der neuronalen Dekodierung gesprochener Sätze." In: Nature 568 (2019), pp. 493–498. Ausgabe: 0028-0836.
[7] György Buzsáki, Costas A. Anastassiou und Christof Koch. "Der Ursprung extrazellulärer Felder und Ströme - EEG, EKG, LFP und Spikes." In: Nature Reviews Neuroscience 13 (2012), p. 407. issn: 1471-0048.
[8] Bijan Pesaran et al. "Untersuchung der Gehirndynamik in großem Maßstab mithilfe von Feldpotentialaufzeichnungen: Analyse und Interpretation." In: Nature Neuroscience 21 (2018), pp. 903–919. Ausgabe: 1097-6256.
[9] Taro Kaiju et al. "EKoG-Aufzeichnung von somatosensorisch evozierten Potentialen mit hoher räumlich-zeitlicher Auflösung mit flexiblen Mikroelektrodenarrays." In: Frontiers in Neural Circuits 11 (2017), p. 20.
[10] Rafael Yuste. "Von der Neuronenlehre zu neuronalen Netzen." In: Nature Reviews Neuroscience 16 (2015), pp. 487–497. Issn: 1471-003x.
[11] Guosong Hong und Charles M. Lieber. "Neuartige Elektrodentechnologien für neuronale Aufzeichnungen." In: Nature Reviews Neuroscience (2019), pp. 1-16. Ausgabe: 1471-003X.
[12] Edwin M. Maynard, Craig T. Nordhausen und Richard A. Normann. "Das Utah Intracortical Electrode Array: Eine Aufzeichnungsstruktur für potenzielle Gehirn-Computer-Schnittstellen." In: Electroencephalography and Clinical Neurophysiology 102.3 (1997), pp. 228–239. Ausgabe: 0013-4694.
[13] Miguel AL Nicolelis et al. "Chronische Aufnahmen mit mehreren Standorten und mehreren Elektroden bei Makakenaffen." In: Proceedings of the National Academy of Sciences 100.19 (2003), pp. 11041-11046. Ausgabe: 0027-8424. eprint:
www . pnas.org/content/100/19/11041.full.pdf.
[14] KD Wise et al. "Mikroelektroden, Mikroelektronik und implantierbare neuronale Mikrosysteme." In: Proceedings of the IEEE 96.7 (2008), pp. 1184-1202. Ausgabe: 0018-9219.
[15] Nicholas M. Dotson et al. "Ein großformatiges halbchronisches Microdrive-Aufzeichnungssystem für nichtmenschliche Primaten." In: Neuron 96 (2017), 769–782.e2. Ausgabe: 0896-6273.
[16] James J. Jun et al. "Voll integrierte Siliziumsonden zur Aufzeichnung der neuronalen Aktivität mit hoher Dichte." In: Nature 551 (2017), p. 232. issn: 1476-4687.
[17] Gian Nicola Angotzi et al. "SiNAPS: eine implantierbare CMOS-Sonde mit aktivem Pixelsensor für simultane großflächige neuronale Aufzeichnungen." In: Biosensors and Bioelectronics 126 (2018), pp. 355-364. Ausgabe: 0956-5663.
[18] Felix Deku et al. "Ultramikroelektroden-Arrays aus amorphem Siliziumkarbid zur neuronalen Stimulation und Aufzeichnung." In: Journal of Neural Engineering 15.1 (2018), p. 016007.
[19] Aziliz Lecomte, Emeline Descamps und Christian Bergaud. "Ein Überblick über mechanische Überlegungen für chronisch implantierte neuronale Sonden." In: Journal of Neural Engineering 15 (2018), p. 031001. issn: 1741-2552.
[20] Dion Khodagholy et al. "NeuroGrid: Aufzeichnung von Aktionspotentialen von der Oberfläche des Gehirns." In: Nature Neuroscience 18 (2014), pp. 310-315. Ausgabe: 1097-6256.
[21] Jason E. Chung et al. "Elektrophysiologische Aufzeichnungen mit hoher Dichte, langer Lebensdauer und mehreren Regionen unter Verwendung von Polymerelektrodenarrays." In: Neuron 101 (2019), 21-31.e5. Ausgabe: 0896-6273.
[22] Stephan L. Chorover und Anne-Marie Deluca. "Eine süße neue Mehrfachelektrode für die chronische Einzelaufzeichnung bei sich bewegenden Tieren." In: Physiology & Behavior 9 (1972), pp. 671–674. Ausgabe: 0031-9384.
[23] Jia Liu et al. "Spritzeninjektierbare Elektronik". In: Nature Nanotechnology 10 (2015), pp. 629-636. Ausgabe: 1748-3387.
[24] Tian-Ming Fu et al. "Stabile chronische Langzeit-Hirnkartierung auf Einzelneuronenebene." In: Nature Methods 13 (2016), pp. 875–882. Ausgabe: 1548-7091.
[25] Flavia Vitale et al. "Fluidische Mikroaktivierung flexibler Elektroden für die neuronale Aufzeichnung." In: Nano Letters 18.1 (2018), pp. 326–335. eprint:
doi.org/10.1021/acs.nanolett.7b04184 .
[26] Lan Luan et al. "Ultraflexible nanoelektronische Sonden bilden eine zuverlässige, glia-narbenfreie neuronale Integration." In: Science Advances 3 (2017), e1601966. Ausgabe: 2375-2548.
[27] Marc D. Ferro et al. "NeuroRoots, ein bioinspiriertes, nahtloses Brain Machine Interface-Gerät für die Langzeitaufzeichnung." In: bioRxiv (2018), p. 460949.
[28] Timothy L. Hanson et al. "Die" Nähmaschine "für die minimalinvasive neuronale Aufzeichnung". In: bioRxiv (2019). eprint:
www.biorxiv.org/content/early/2019/03/14/578542.full.pdf .
[29] Kip A. Ludwig et al. "Chronische neuronale Aufzeichnungen unter Verwendung von Silizium-Mikroelektroden-Arrays, die elektrochemisch mit einem Poly (3,4-ethylendioxythiophen) (PEDOT) -Film abgeschieden wurden." In: Journal of Neural Engineering 3 (2006), p. 59. Ausgabe: 1741-2552.
[30] Seth J. Wilks et al. "Poly (3,4-ethylendioxythiophen) als mikro-neuronales Grenzflächenmaterial für die Elektrostimulation." In: Frontiers in Neuroengineering 2 (2009), p. 7. Ausgabe: 1662-6443.
[31] JD Klein, SL Clauson und SF Cogan. "Morphologie und Ladekapazität von gesputterten Iridiumoxidfilmen." In: Journal of Vacuum Science & Technology A: Vakuum, Oberflächen und Filme 7 (1989), pp. 3043-3047. Ausgabe: 0734-2101.
[32] SF Cogan, TD Plante und J. Ehrlich. "Gesputterte Iridiumoxidfilme (SIROFs) für niederohmige neuronale Stimulations- und Aufzeichnungselektroden." In: Die 26. Internationale Jahreskonferenz der IEEE Engineering in Medicine and Biology Society 2 (2004), pp. 4153-4156.
[33] Tarun Saxena et al. "Der Einfluss einer chronischen Verletzung der Blut-Hirn-Schranke auf die intrakortikale Elektrodenfunktion". In: Biomaterials 34 (2013), pp. 4703–4713. issn: 0142-9612.
[34] Joshua H. Siegle et al. "Open Ephys: eine Open-Source-Plattform auf Plugin-Basis für die Mehrkanal-Elektrophysiologie." In: J. Neural Eng. 14 (2017), pp. 1–13.
[35] E. Calabrese et al. "Ein quantitativer Magnetresonanz-Histologie-Atlas der postnatalen Rattenhirnentwicklung mit regionalen Schätzungen von Wachstum und Variabilität." In: NeuroImage 71 (2013), pp. 196–201.
[36] Sonia Todorova et al. "Sortieren oder nicht sortieren: Der Einfluss der Spike-Sortierung auf die Leistung der neuronalen Decodierung." In: Journal of Neural Engineering 11 (2014), p. 056005. issn: 1741-2552.
[37] Breanne P. Christie et al. "Vergleich der Spike-Sortierung und des Schwellenwerts von Spannungswellenformen für die Leistung der intrakortikalen Gehirn-Maschine-Schnittstelle." In: Journal of Neural Engineering 12 (2015), p. 016009. issn: 1741-2552.
[38] Eric M. Trautmann et al. "Genaue Schätzung der Dynamik neuronaler Populationen ohne Spike-Sortierung." In: Neuron (2019). Ausgabe: 0896-6273.
[39] Andy Zhou et al. "Ein drahtloses und artefaktfreies 128-Kanal-Neuromodulationsgerät zur Stimulation und Aufzeichnung in geschlossenen Kreisläufen bei nichtmenschlichen Primaten." In: Nature Biomedical Engineering 3 (2019), pp. 15–26.
[40] Joseph E. O'Doherty et al. "Aktive taktile Erforschung über eine Gehirn-Maschine-Gehirn-Schnittstelle". In: Nature 479 (2011). Ausgabe: 1476-4687.
[41] Sharlene N. Flesher et al. "Das wiederhergestellte Tastgefühl verbessert die neuroprothetische Armkontrolle." In: bioRxiv (2019), p. 653428.
[42] Fabien B. Wagner et al. "Durch gezielte Neurotechnologie wird das Gehen bei Menschen mit Rückenmarksverletzungen wiederhergestellt." In: Nature 563 (2018), pp. 65–71. Ausgabe: 0028-0836.