
In den letzten Jahren wollte ich ein Spielzeug auf dem Bedienfeld haben und immer mit einem Video. Aber kaufen Sie nicht fertig, sondern machen Sie es selbst. Und am Ende habe ich mir ein solches Spielzeug bestellt, mit einem einfachen Steuerungssystem, aber großem Modernisierungspotential. Es dauerte ca. 9 Monate, bis alle Arbeiten von Anfang bis fast abgeschlossen waren. Die meiste Zeit warteten Komponenten aus China.
Ich schreibe größtenteils einen Artikel für mich selbst, damit ich in Zukunft nicht vergesse, was ich getan habe, wie, warum und warum.
Es wird zwei Hauptteile enthalten: Hardware und Software und möglicherweise einen weiteren Teil über das Layout von Eisen. Zunächst beschreibe ich die Hardware, von der ich gesammelt habe, auf welche Probleme ich gestoßen bin und wie ich sie gelöst habe.
1. Hardware
Das System besteht aus einem Bedienfeld und Geräten, die auf einer Schreibmaschine installiert sind. Betrachten wir sie genauer.
1.1 Systemsteuerung
Komponenten
Spielhut
Spiel HAT wurde ausgewählt, weil Dies ist eine schlüsselfertige Lösung, die einen Bildschirm, einen Joystick und eine Tastatur kombiniert, die ausreichen, um die Maschine zu steuern.

Der Joystick auf diesem Board ist KY-023. Er entschied sich für anstelle des Lenkrads. Es stellte sich jedoch heraus, dass Raspberry keinen ADC hat und die einzigen Werte, die daraus erhalten werden könnten, 0 und 1 sind, was für eine reibungslose Drehung der Räder eindeutig nicht ausreicht.

ADS1115
Dieses Problem wurde vom ADS1115-Modul gelöst.
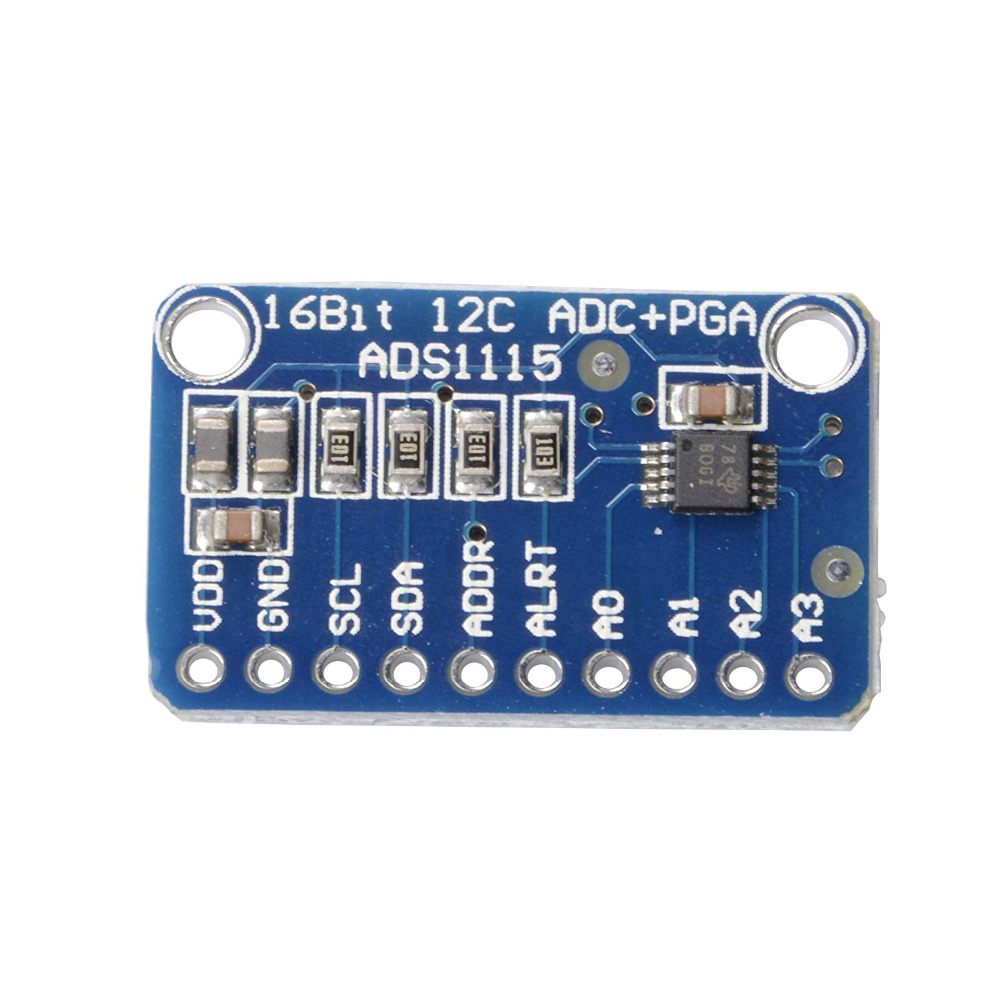
Das Modul wurde mit dem Game HAT verlötet und mit 3M-Band daran befestigt. Die Messwerte werden an den Mittelschenkeln der variablen Widerstände am Joystick gemessen. Es sieht so aus:

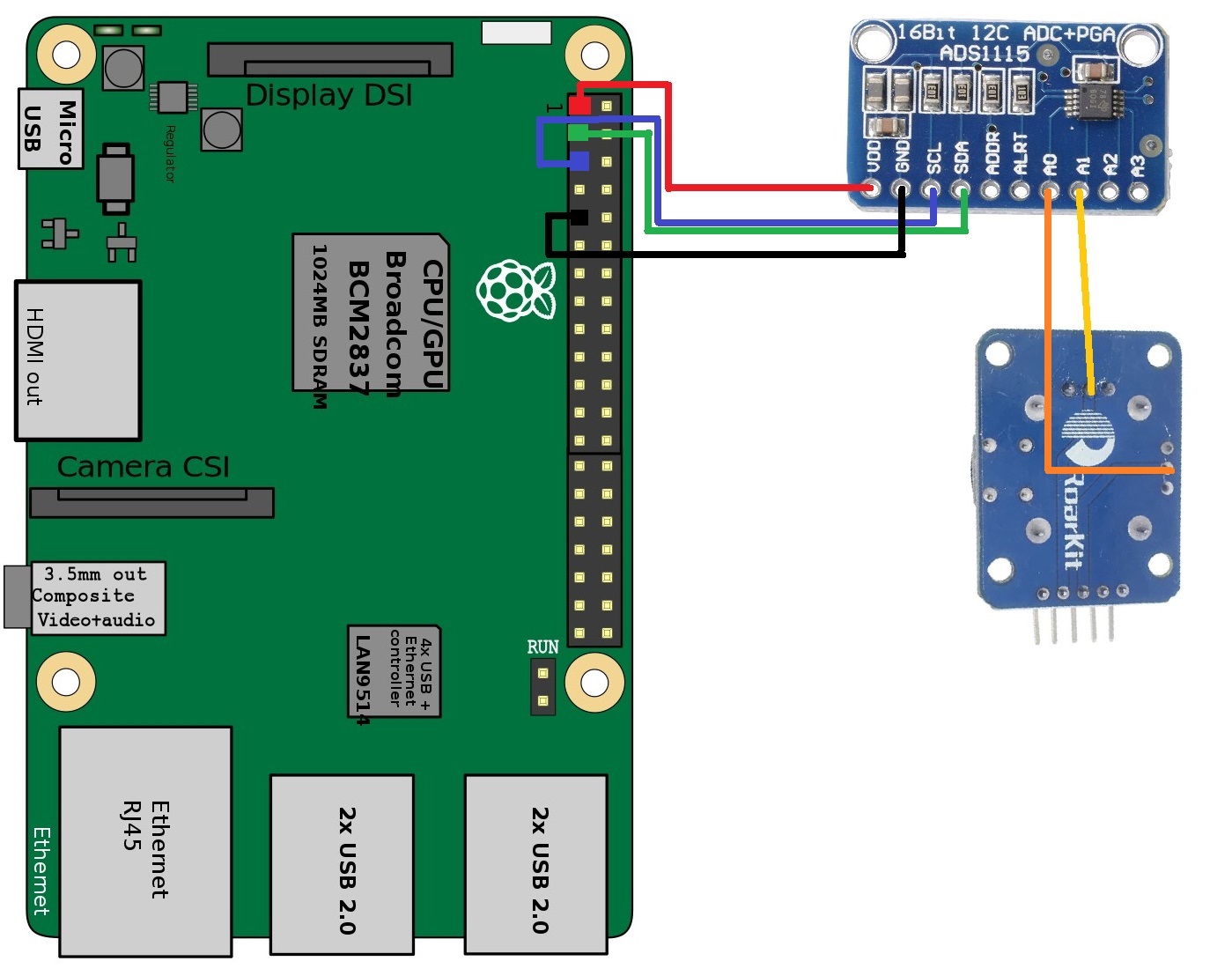
Der Joystick ist ebenfalls in den Game HAT eingelötet. Die Drähte sind mit den Game HAT-Anschlüssen verlötet, die den Stromversorgungs- und I2C-Anschlüssen der Himbeere entsprechen. Schaltplan:
Damit ist die Hardware-Sammlung des Bedienfelds abgeschlossen. Äußerlich hat er keine sichtbaren Veränderungen erfahren.
1.2 Maschine
Wie schrecklich alles unter der Haube aussieht:
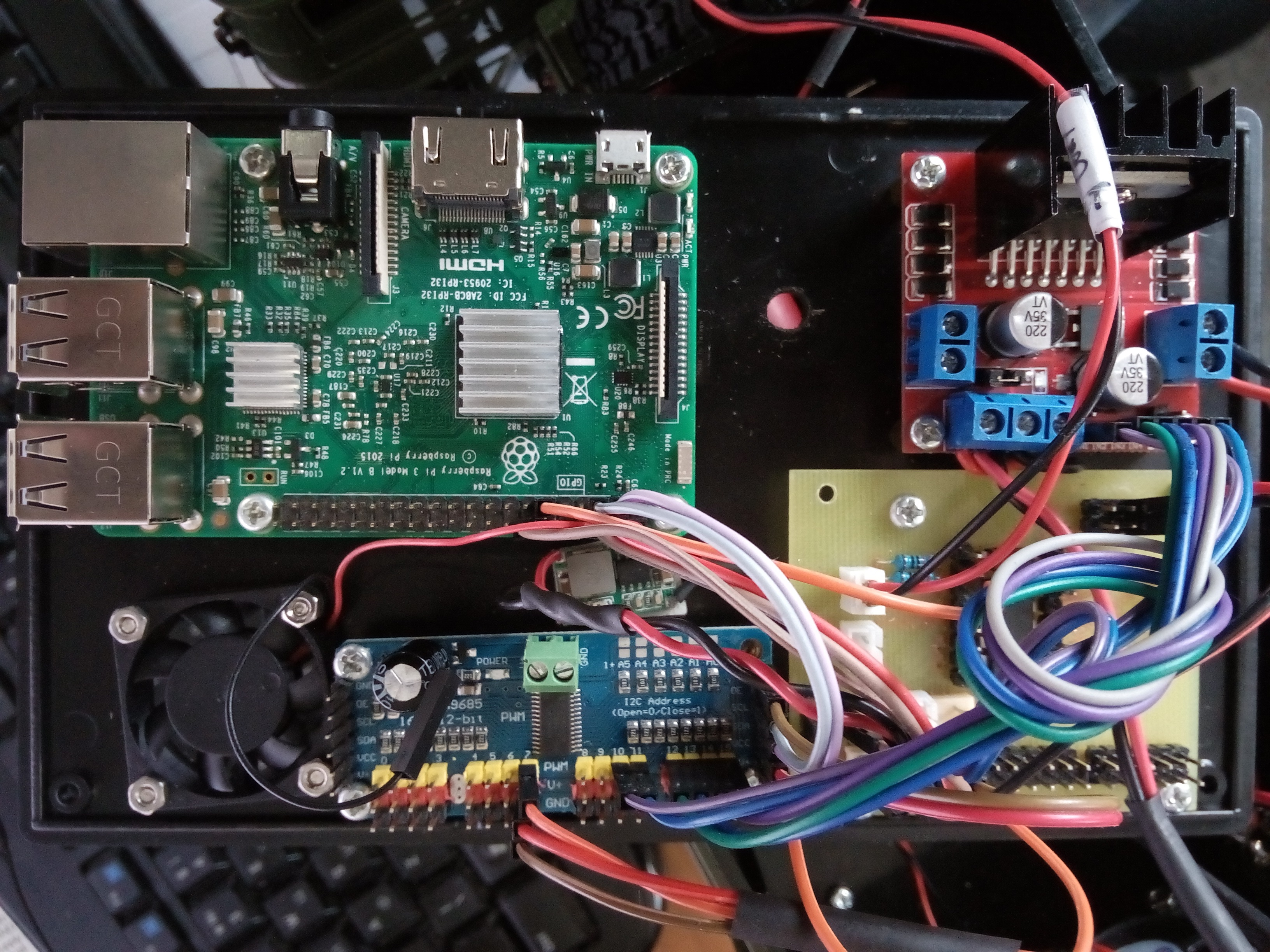
Lass es uns richtig machen.
Komponenten
- Himbeer pi 3
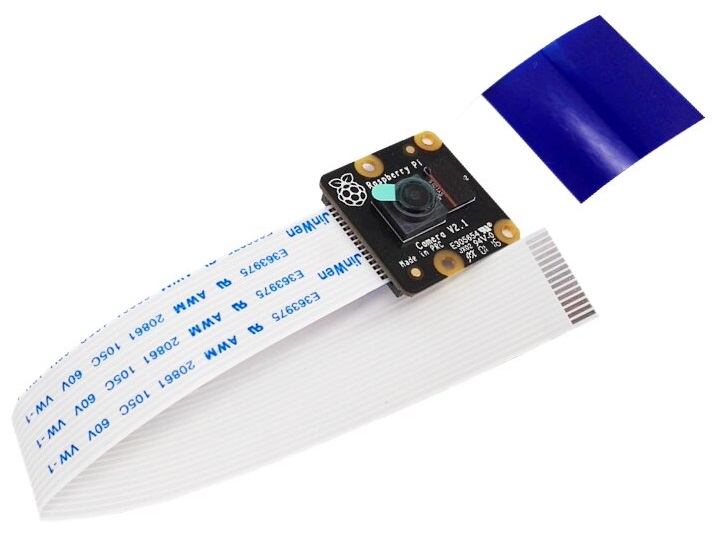
- Himbeer-Pi-Kamera v2 NoIR
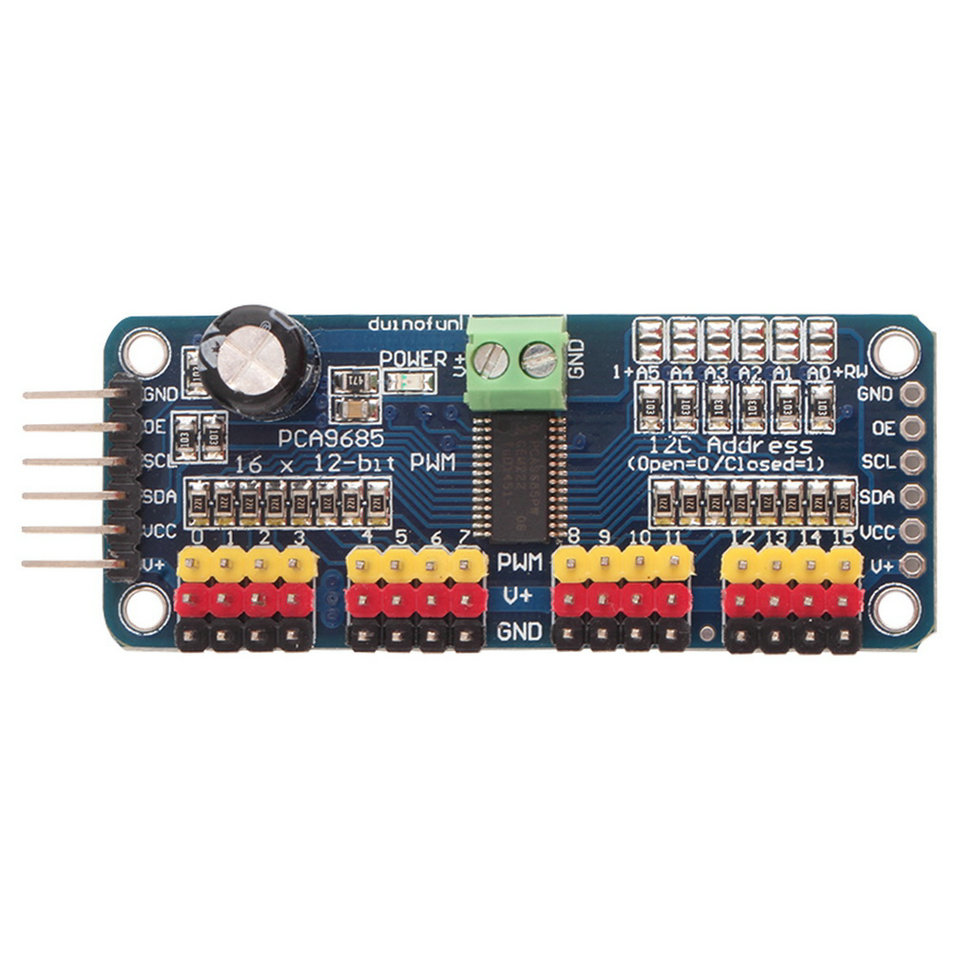
- PCA9685 PWM-Generator
- Mini-360-Abwärtswandler
- Laderegler BMS CF-4S30A-A
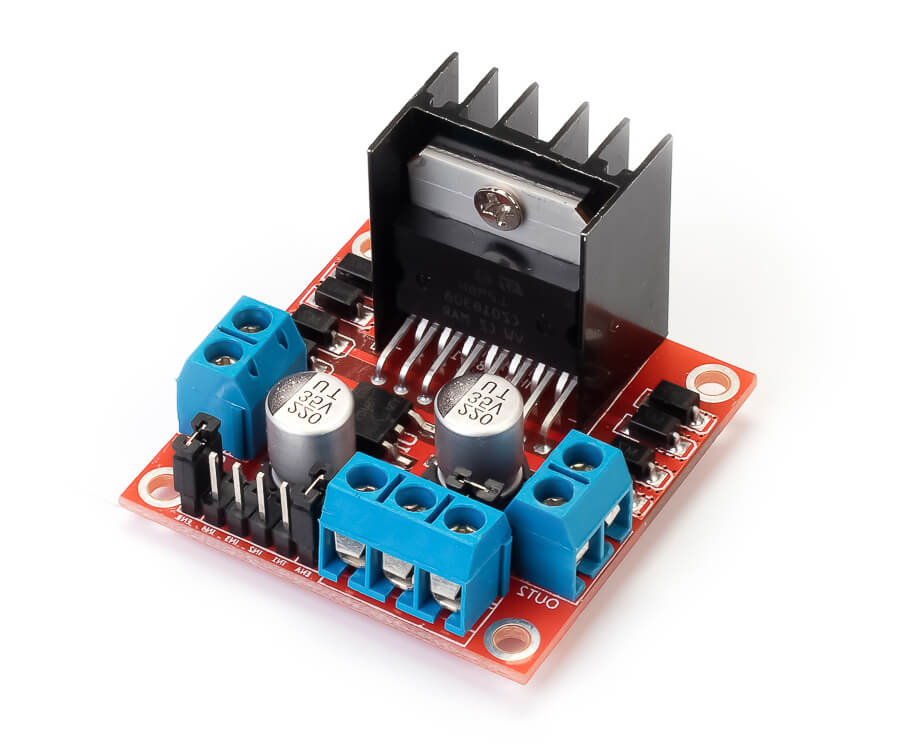
- Motorsteuerungstreiber L298N
- Meine Lichtsteuerkarte basiert auf dem L293-Treiber
- 3 Lithium-Ionen-Batterien 18650
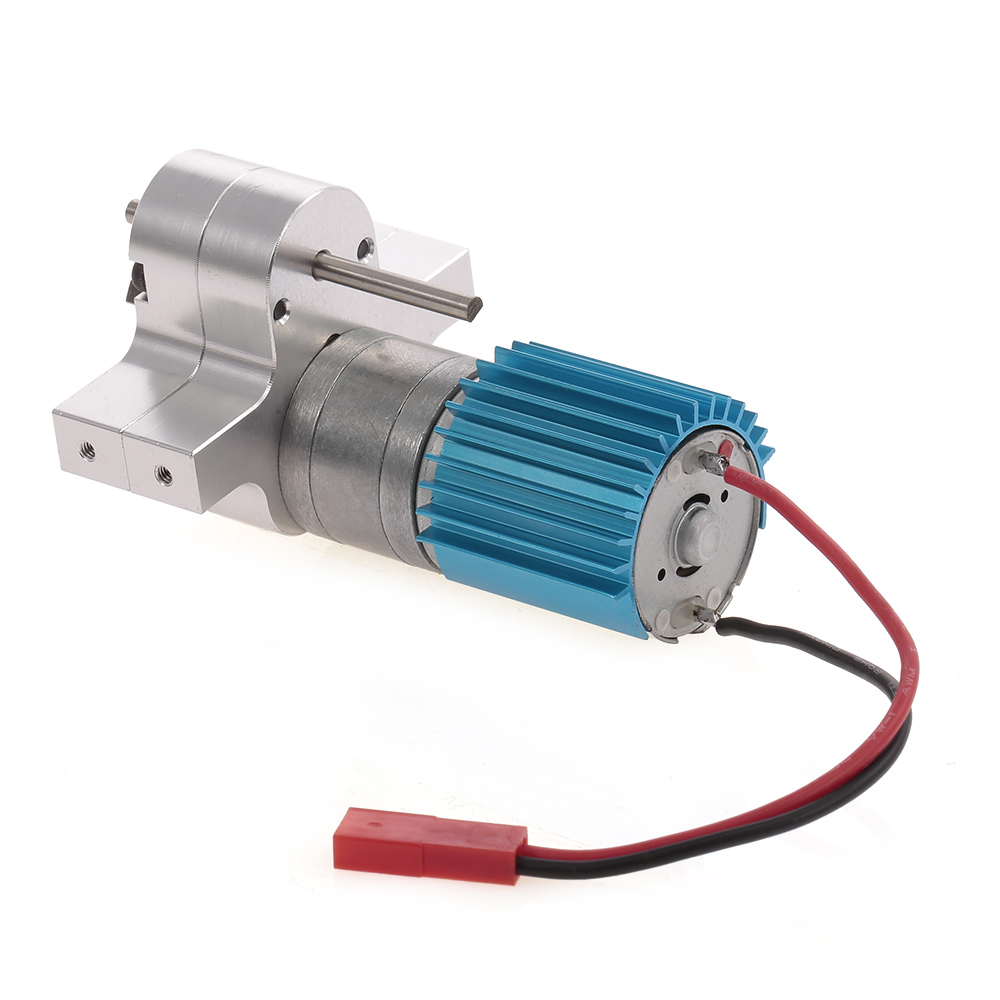
- 370 Motor
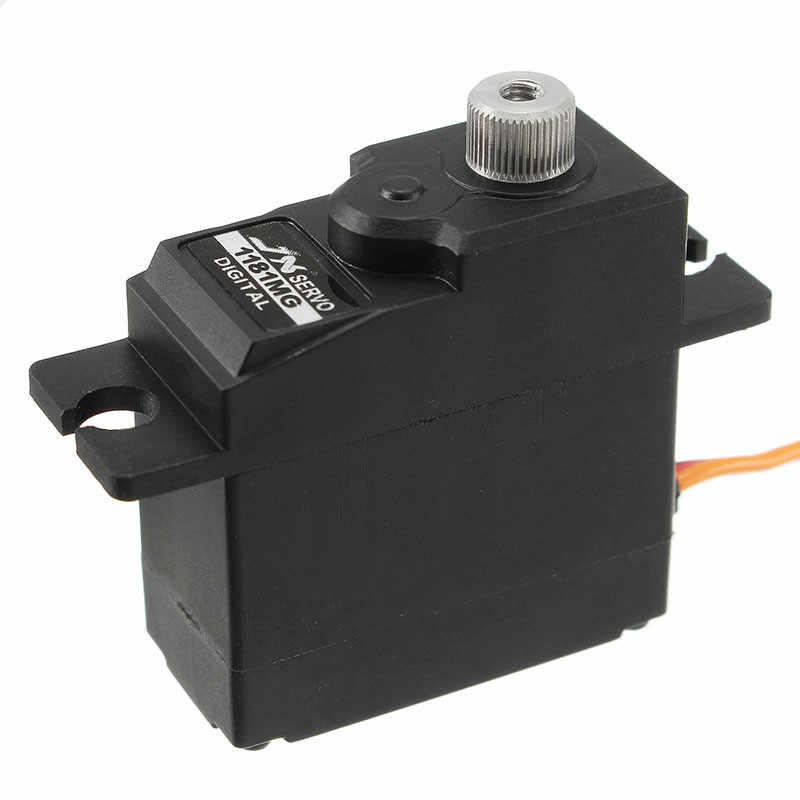
- DI-1181MG Servo
Ernährung
Beginnen wir mit der Stromversorgung, die von drei 18650-Batterien geliefert wird, die in Reihe geschaltet sind und ~ 12 Volt liefern.
Die Batterien werden über die BMS CF-4S30A-A-Karte angeschlossen, damit sie auf dem Pokatushki aufgeladen und nicht auf Null entladen werden können.
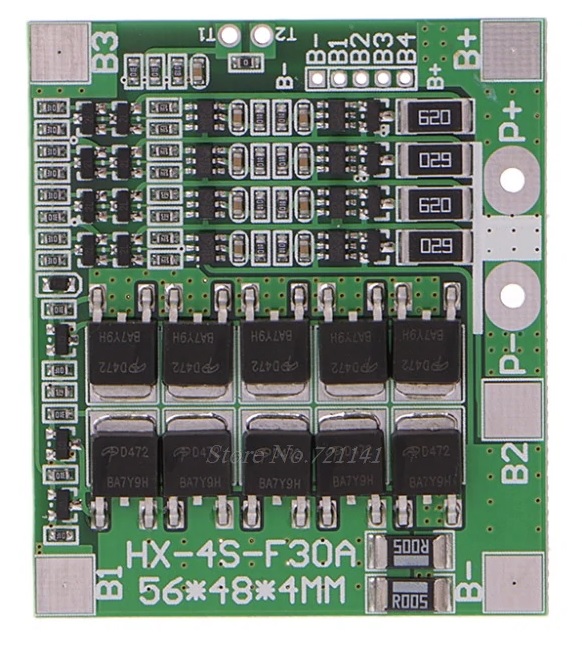
Dieses Board ist jedoch für 4 Batterien ausgelegt und wurde für die Arbeit mit 3 Batterien überarbeitet. Warum wurde sie genommen und nicht 3S 40A BMS. Weil sie zur Hand war.
Änderungsschema:

Diese Spannung speist den 370-Motor über den L298N-Treiber.
Für die Stromversorgung der Himbeere wird die Spannung derselben Batterien verwendet, die jedoch vom Mini-360-Modul auf 5 Volt reduziert wird.

Himbeere direkt auf den Beinen.
Bewegung
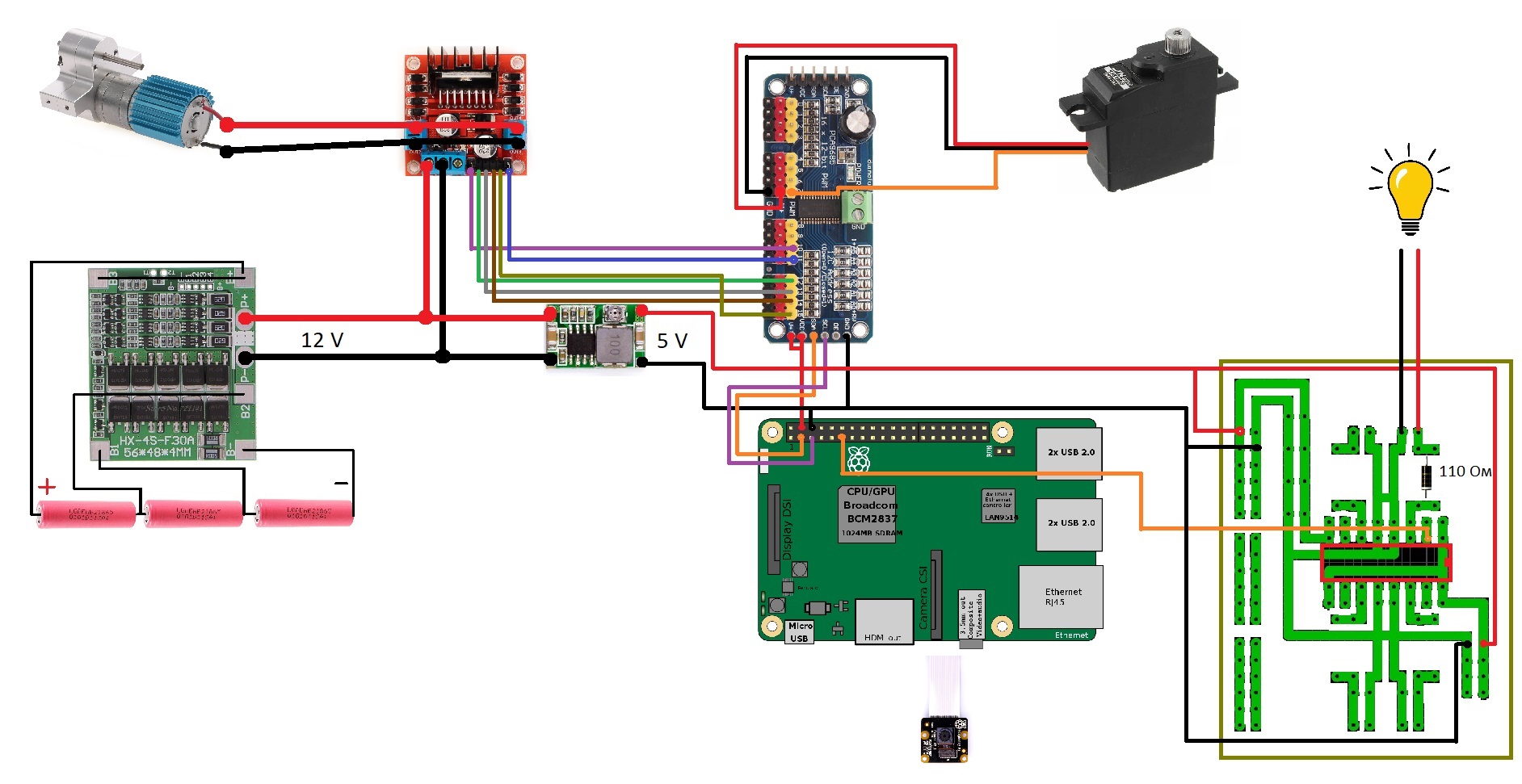
Sprechen wir jetzt darüber, wie das Auto fährt. Zur Steuerung des Lenkmechanismus wird ein DI-1181MG-Servoantrieb verwendet, der über den PCA9685 gesteuert wird. PCA9685 ist auch für die Steuerung des Motors verantwortlich, indem seine Geschwindigkeit und Drehrichtung über den L298N-Treiber angepasst werden. Raspberry steuert auch den PCA9685 am I2C-Bus. Der PCA9685 wird mit einem Abwärtswandler mit 5 Volt betrieben. Dies reicht für Servos und Motorsteuerung. Der Motor ist an zwei L298N-Ausgänge angeschlossen, um die Leistung zu erhöhen.
Video
Für das Video, das ich mit Camera v2 NoIR verwendet habe, kann es problemlos mit Raspberry verbunden werden. Es gab jedoch einige Verbesserungen. Die Standardschlaufe der Kamera war 15 cm lang, was für Installationsarbeiten nicht ausreichte. Diese Schleife ist ebenfalls nicht Standard, sie hat 15 Pins. Auf aliexpress wollen die Chinesen für eine lange Schleife für diese Kamera mehr als 1000 Rubel. Daher wurde ein Satz von 10 Standard-16-Pin-Schleifen für 300 Rubel gekauft. Mithilfe der Hightech-Technologie für die Verwendung von Büroscheren wurde ein 15-poliges Kabel für die Kamera überarbeitet.

Zum Zeitpunkt des Schreibens, im 2. Monat, warte ich auf die Halterung für die Kamera in der Kabine. Bisher zeigt die Maschine nur die Decke)
Das Licht
Die Maschine hat bereits reguläres Licht installiert, bestehend aus Scheinwerfern mit 2 gelben LEDs. Es bleibt nur, um sie anzutreiben.
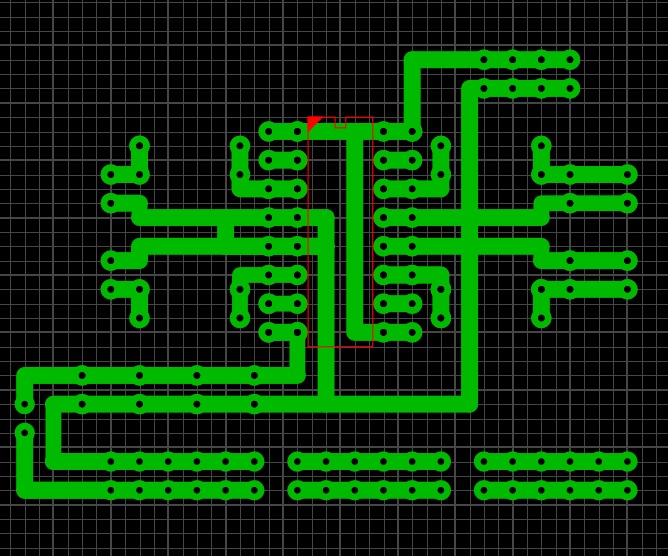
Das Licht wird über mein Board gesteuert, das auf dem L293-Treiber basiert. Die Stromversorgung der Dioden erfolgt über einen Widerstand. Die Platine wird mit LUT-Technologie hergestellt. Es hat auch eine Reihe von Spuren für die Stromverkabelung.
Es wäre möglich, PCA9685 zur Steuerung des Lichts zu verwenden. Zu der Zeit, als ich mein eigenes machte, wusste ich nichts über PCA9685 und konnte darauf verzichten.
Leiterplatte:
Ich werde das allgemeine Verbindungsdiagramm vorstellen:
Aber das stand in der Schreibmaschine, bis ich kletterte))

Zum Zeitpunkt des Schreibens hatte ich bereits begonnen zu vergessen, was ich tat und wie. Obwohl seit dem Berg nicht mehr als ein Monat vergangen ist.
Alles ist in Hardware. In meinem nächsten Artikel werde ich den Softwareteil des animierten Eisens beschreiben.
Dankbarkeit
Meine Arbeitskollegen: Andrei und Nikolai für die Hilfe beim Eisen, Anton und Eugene für die Hilfe beim Video. Samodelkin-22 für LUT meines Boards. Und Murzik.
Referenzen
Teil 2
Teil 3