Teil 2Teil 3Einige der Fotos stammen von der
Hack The Moon- Website.
Dieser Artikel wurde auf der 27. Jahreskonferenz für Navigation und Navigation der American Society of Astronautics (AAS) am 6. Februar 2004 in Breckenridge, Colorado, vorgestellt. Die von Ihnen angebotene Version enthält zusätzliche Abbildungen, Kommentare und kleinere Korrekturen.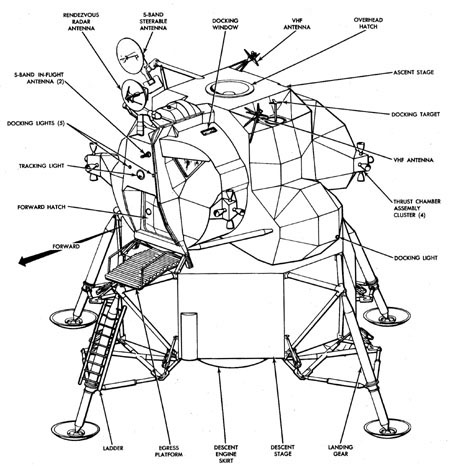
ZUSAMMENFASSUNG: Mission Apollo 11 landete erfolgreich auf dem Mond, trotz zweier Computerprobleme, die das Mondmodul während der kontrollierten Landung betrafen. Ein ungelöstes Problem in der Proximity-Radar-Schnittstelle dauerte etwa 13% der Zykluszeit des Bordcomputers, was zu fünf Programmabstürzen und Neustarts führte. Ein weniger bekanntes Problem wurde durch fehlerhafte Daten verursacht, die zu Schwankungen des Schubes des Landemotors des Mondmoduls führten, da sich der Schubsteuerungsalgorithmus an der Stabilitätsgrenze befand. Eine Erklärung dieser Probleme ermöglicht es, das Betriebssystem des Apollo-Bordcomputers und das Mondlandesteuerungsprogramm zu beschreiben.
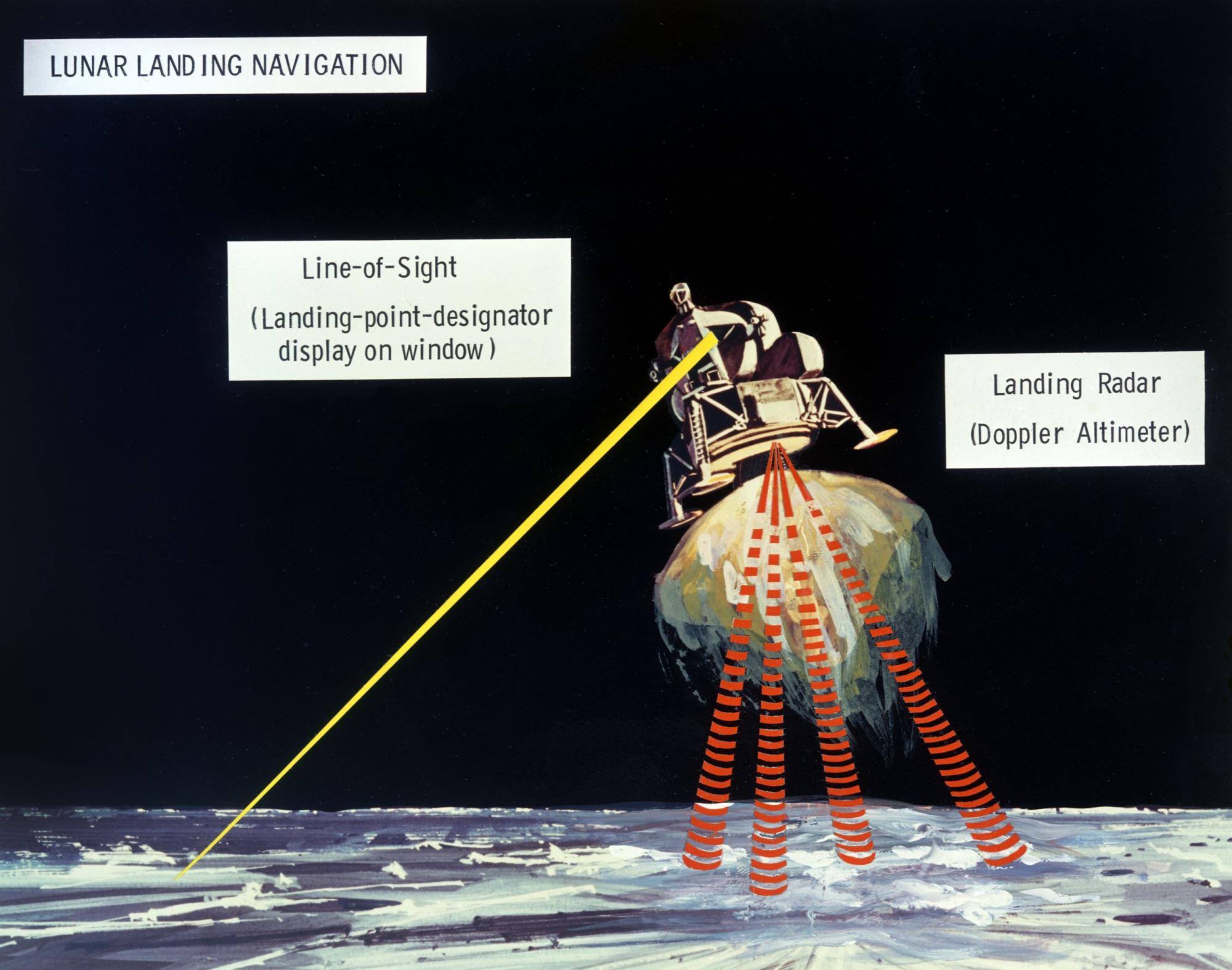 Abbildung der Landung des Lunar Excursion Module (LEM) auf der Mondoberfläche. Der LEM-Pilot verwendete das Landeradar und visuelle Messungen durch das LEM-Fenster, um den Landeplatz zu verfolgen und zu verifizieren.
Abbildung der Landung des Lunar Excursion Module (LEM) auf der Mondoberfläche. Der LEM-Pilot verwendete das Landeradar und visuelle Messungen durch das LEM-Fenster, um den Landeplatz zu verfolgen und zu verifizieren.LM-1, auch bekannt als Apollo 5, war eine 6-stündige unbemannte Mission im terrestrischen Orbit, an der nur das Mondmodul beteiligt war. Es fand am 22. Januar 1968 statt. Für diejenigen von uns, die die Bordcomputersoftware LGC (Lunar Module Guidance Computer) entwickelt haben, war dies der erste Flug. Ein Ereignis, das uns jetzt unendlich fern erscheint.
Die Mission umfasste zwei Starts des Motors des reaktiven Landesystems des Mondmoduls (LM's Descent Propulsion System, DPS). Bei der zweiten Zündung entwickelte Allan Klumpp, der die Gleichungen zur Steuerung der Mondlandung [1] auf der Grundlage der Arbeit von George Cherry [2] entwickelte, einen Weg, um eine Mondlandung für die Erdumlaufbahn zu simulieren. Es bestand aus drei Phasen: der Bremsphase, der Sichtbarkeitsphase und der letzten Landephase des Landemoduls. Der erste Start des Motors war notwendig, um das Manöver des Übergangs in die Sinkbahn vor der Landung zu simulieren. Dies war die erste Zündung des Mondmodulmotors im Flug, die etwa 38 Sekunden dauerte.
Das LGC (Mondmodul-Bordcomputer) befand sich in der 9. Phase der LM-1-Mission, einem Programm, das die erste Zündung des DPS kontrollierte. Spätere Missionen wurden flexibler organisiert und die erste Zündung des DPS wurde in Schritt P40 des Programms durchgeführt. (Ein detaillierteres Flugprogramm finden Sie
hier .
Ca. Transl. ) LM-Manöver in die Zündposition. Der Computer startet den Countdown bis zur Zündung. In der 30. Sekunde wird die READACCS-Task zum ersten Mal ausgeführt. Sie liest die Messwerte der Beschleunigungsmesser im Trägheitsmodul des Raumfahrzeugs, legt die auszuführende SERVICER-Aufgabe fest, die sofort startet, und stellt sich mit einer Verzögerung von 2 Sekunden auf die Ausführung ein. Es wird durch den Zustandsvektor aus dem Orbitalintegrationsprogramm initialisiert, und die Navigationsgleichungen beginnen, Beschleunigungsmesserdaten zur Berechnung der Positions- und Beschleunigungsvektoren zu verwenden. READACCS und SERVICER starten während der gesamten Flugphase alle zwei Sekunden bei eingeschaltetem Motor. Siebeneinhalb Sekunden vor der Zündung begann das „schmutzige“ Brennen von RCS (Reaction Control System). Wir alle näherten uns dem Kommunikationssystem, das uns mit dem Flugkontrollzentrum von Houston verband.
Wir hörten "Der Motor ist an" ... und nach ein paar Sekunden ... "Der Motor ist aus."
Bald wurde uns klar, was passiert war. Ein kleiner Code in SERVICER, der als "Delta-V-Monitor" bezeichnet wurde, entschied, dass der Motor fehlerhaft war, und schickte einen Befehl zum Abstellen des Motors. Aber warum? Damit der Motor in den Schubmodus wechseln kann, hat dieser Code nach dem Einschalten des Motors immer eine bestimmte Zeit gewartet, bevor mit der Überwachung des Motors begonnen wurde. Diesmal, am Ende dieses Zeitraums, gab der Motor jedoch immer noch nicht genügend Traktion, um die Kriterien des Motortraktionsmonitors zu erfüllen.
Veröffentlichte Berechnungen [3] führten den langsamen Austritt von DPS auf den vollen Schub zurück, da die Tanks des Mondmoduls nicht unter vollem Druck standen. Die Untersuchung des Autors zeigt jedoch, dass das Problem anders war. Bei einem DPS-Kraftstoffsystem würde sich während des normalen Betriebs ein Ventil öffnen, durch das Kraftstoff einige Sekunden vor der Zündung in die Rohrleitung gelangt, wenn der Motor betriebsbereit ist. Aber im Mondmodul ist wahrscheinlich das Ventil undicht, das den Kraftstofffluss von der Rohrleitung in den Motor regelt. Um ein mögliches vorzeitiges Eindringen von
hypergolischem Kraftstoff in das Triebwerk (das mit Explosionen behaftet ist) zu verhindern, wurde kurz vor dem Flug beschlossen, den Kraftstofffluss in das Triebwerk bis zum Zeitpunkt der Zündung zu verzögern [4].
Der Motor startete langsam, nicht weil die Tanks unter niedrigem Druck standen, sondern weil der Kraftstoff den Motor noch nicht erreicht hatte. Es wäre sehr einfach für uns, eine Parametereinstellung festzulegen, wie lange der Delta-V-Monitor warten soll, bevor der Motor überprüft wird - aber niemand hat uns davon erzählt.
Houston schickte ein Signal, um den Bordcomputer auszuschalten. Die Hauptziele der Mission LM-1 wurden mit Kontrolle von der Erde aus erreicht. Wir, diejenigen, die den Mondmodul-Computer programmierten, gerieten in Verzweiflung und Enttäuschung, was durch die Reaktion der Öffentlichkeit verstärkt wurde, die nicht zwischen einem Fehler im Programm und falschen Daten unterschied. Und dies war nicht der letzte Fall, in dem der scheinbar sichere Parameter in Bezug auf die Eigenschaften des Landemotors die Mission fast an den Rand des Scheiterns brachte.
* * *
Die Entwicklung des Navigationssystems für das Apollo-Schiff wurde dem Massachusetts Institute of Technology (MIT Instrumentation Laboratory) in Cambridge übertragen. Unter der Leitung seines Gründers spielte das Labor „Dock“ Charles Stark Draper (Charles Stark Draper) seit 1939 eine wichtige Rolle bei der Entwicklung von Trägheitsnavigationssystemen. Der Vertrag mit uns über die Entwicklung des Apollo Primary Guidance Navigations- und Kontrollsystems PGNCS, ausgesprochen „Pings“, war der erste Vertrag, der im Rahmen des Apollo-Programms unterzeichnet wurde. Doc selbst hat sich für diese Mission angemeldet.
1970 wurde das Instrumentation Laboratory in Charles Stark Draper Laboratory umbenannt und 1973 vom MIT unabhängig, obwohl es Verbindungen dazu hatte. Drapers Labor ist immer noch aktiv an den bemannten Weltraumprogrammen der NASA beteiligt.
 Rendezvous-Navigation. Die Abbildung zeigt die Konvergenz und das Andocken des LEM und des Befehlsmoduls in der Mondumlaufbahn nach dem Abheben von der Mondoberfläche.
Rendezvous-Navigation. Die Abbildung zeigt die Konvergenz und das Andocken des LEM und des Befehlsmoduls in der Mondumlaufbahn nach dem Abheben von der Mondoberfläche.Das Programm zur Steuerung des Fluges des Mondmoduls hieß SUNBURST. Zum Zeitpunkt des Fluges LM-1 arbeiteten wir bereits an SUNDANCE, dem Apollo 9-Missionsmanagementprogramm im Orbit um die Erde. SUNDANCE wiederum wurde zu LUMINARY, einem Programm für Apollo 10 und der Mission, auf dem Mond zu landen. Die Mission von Apollo 11 im Juli 1969 wurde vom LUMINARY-Programm Version 99 gesteuert. Version 116 wurde im Dezember von Apollo 12 usw. gesteuert.
Dieser Artikel entspricht den im Apollo-Programm verwendeten Namen. Die Namen von Programmen, die Namen von Variablen in Programmen, die wir normalerweise in Großbuchstaben geschrieben haben.
Programme für diesen Computer haben wir inoffiziell "Seile" genannt, da sie im Bordcomputer in einem ROM gespeichert waren, das einem Seil aus geflochtenen Kupferdrähten ähnelt. Für Mondmissionen war der Programmspeicher auf 36 KB Wörter, jeweils 16 Bit plus ein Paritätsbit und plus 2 KB RAM-Wörter begrenzt. Unter Berücksichtigung des Speichers des Apollo AGC-Computers und des Befehlsmoduls (CM), das das COLOSSUS-Programm enthält, ist es richtig zu sagen, dass wir mit 152 KB Speicher auf dem Mond saßen.
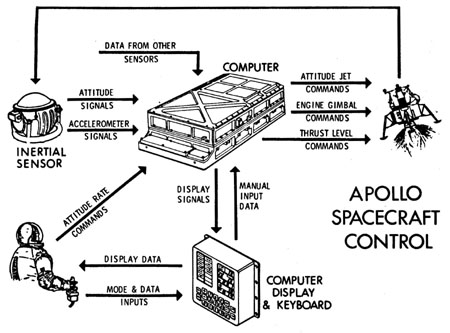
Abbildung 2.
Apollo Lunar Module, primäres Leit- und Navigationssystem, PGNSDie AGC ist in einem robusten, luftdichten Aluminium-Magnesium-Gehäuse montiert, das goldfarben eloxiert ist, ungefähr sechs Zoll mal einen Fuß mal zwei Fuß misst, 70 Pfund wiegt und ungefähr 55 Watt verbraucht. Seine Logikschaltung bestand aus 5600 ODER-NICHT-Elementen mit drei Eingängen, die in zwei in flachen integrierten Schaltkreisen verpackt waren. Eldon Hall (Eldon Hall), der Hauptentwickler der Maschine, traf trotz der Unreife dieser Technologie in den frühen 60er Jahren die mutige Entscheidung, Mikrochips für den Computer zu verwenden [5].
LGC (mit allen Geräten) befand sich hinter den Astronauten hinter dem Mondmodul-Cockpit. Vor den Astronauten gab es eine starre Struktur namens „Navigationsbasis“, auf der das Zeigerteleskop und das Trägheitsmessmodul (IMU) in festen geometrischen Koordinaten montiert waren. Ein Tastatur- und Anzeigemodul (DSKY) wurde zwischen den Sitzen der Astronauten montiert. Abbildung 2 zeigt die Komponenten und Schnittstellen auf hoher Ebene des primären Navigationssystems des Mondmoduls.
Das IMU-System (Trägheitsmessgerät), das in einem kugelförmigen Körper mit einem Durchmesser von etwa einem Fuß zusammengebaut ist, ist das Herzstück des Navigationssystems. Ihr eigenes Herz, umgeben von drei ineinander eingebetteten Aufhängungen, ist ein „festes Element“, eine kleine Plattform, auf der drei Präzisionsgyroskope und drei Beschleunigungsmesser montiert sind, die sich für die Trägheitsausrichtung des Schiffes in einer bestimmten Position befinden müssen. Jegliche Abweichungen in der Position des Schiffes werden von Gyroskopen aufgezeichnet, und die Aufhängungen werden bewegt, um die Position zu korrigieren. Dies alles geschieht mit hoher Genauigkeit und hängt (fast) nicht von der Position des Schiffes ab. Das "feste Element" gibt eine konstante Referenzposition an. Die REFSMMAT-Matrix drückt die Verschiebung des festen Terms relativ zum Trägheitsreferenzrahmen aus. Beschleunigungsmesser messen das Geschwindigkeitsinkrement während der Flugphase bei eingeschaltetem Motor im Koordinatensystem des festen Elements.
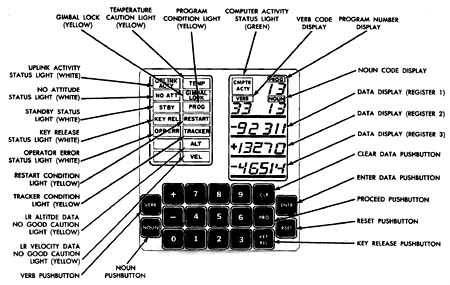
Abbildung 3:
Anzeige des Mondmoduls und Tastaturmodul (DSKY)DSKY war die wichtigste Mensch-Maschine-Schnittstelle für LGC. Für eine Anzeige mit drei Universalregistern, in denen jeweils ein fünf Dezimalstellen langes Vorzeichen gespeichert war, drei Register mit zwei Dezimalstellen zur Anzeige der aktuellen Flugphase (Zahlen von 63 bis 68 für die Landung auf dem Mond) sowie ein „Verb“ und "Nomen". Verben und Substantive werden für die primitive Sprache der Kommunikation zwischen dem Team und dem Computer benötigt. Die Flugphase und die Verb / Nomen-Kombination werden in einigen Fällen vom Programm festgelegt und in anderen Fällen von der Besatzung über die Tastatur mit 19 Tasten eingegeben. Der Inhalt der drei allgemeinen Register hängt vom eingegebenen Substantiv und Verb ab. DSKY enthält außerdem eine Reihe von Anzeigelampen, die vom Computer gesteuert werden, und Computeraktivitätsanzeigen, die leuchten, wenn sich die LGC nicht im Standby-Modus befindet.
Der AGC-Computer im Mondmodul und im Befehlsmodul wurde in zwei Sprachen programmiert. Eine, die wir "Basic" oder genauer "Yul" nannten, war ein Assembler mit etwa 40 Teams [6], verfasst von Hugh Blair-Smith. Der zweite war ein Interpreter, der die Sprache interpretiert (in der Tat eine Reihe von Unterprogrammen), um Navigationsberechnungen zu vereinfachen, einschließlich Vektoren und Matrizen von Zahlen mit doppelter Genauigkeit (30-Bit-Festkommazahlen), aber sehr langsam. "The Interpreter" wurde von Charles Muntz geschrieben.
Der AGC-Speicherzyklus hatte eine Dauer von 11,7 μs. Die Addition mit einfacher Genauigkeit im Assembler dauerte zwei Zyklen. Die Vektormultiplikation mit doppelter Genauigkeit im Interpreter dauerte etwa 5 ms. Eine der Herausforderungen bei der AGC-Programmierung bestand darin, zwei Sprachen zu jonglieren, um von Fall zu Fall das beste Gleichgewicht zwischen Geschwindigkeit und Kompaktheit zu erreichen.
Apollos Computerprogramme waren klein genug, um in eine einzelne Liste zu passen, normalerweise gefaltetes Papier mit 11 x 15 Zoll großen Seiten und einer 6 Zoll großen Bündeldicke. Die Auflistung enthielt eine Zeichentabelle, die während der Ausführung des Streams verfolgt werden kann. Mit einer Auflistung wussten wir immer, dass die Antwort darin war, als wir nach einem Fehler suchten, obwohl es manchmal teuflisch schwer zu finden war.

Abb. 4.
Auflistung des Programms des Mondmoduls LUMINARY 131Die LGC-Architektur war modular, aber vielseitig. Im Computer haben wir das metrische System zumindest für Navigationsaufgaben verwendet. Die NASA-Betreiber und insbesondere die Astronauten bevorzugten jedoch das englische Maßsystem. Dies bedeutet, dass vor der Anzeige die Höhe und die vertikale Geschwindigkeit (zum Beispiel) vom metrischen System in Fuß und Fuß / s umgerechnet werden. Masse und Traktion werden in Pfund ausgedrückt. Da der Zweck dieses Artikels darin besteht, teilweise zu zeigen, was wir in dieser Ära der Raumschiffe Dinge nannten, werde ich die Einheiten verwenden, die zu dieser Zeit akzeptiert wurden.
 Cartoon auf Draper's Dock
Cartoon auf Draper's Dock* * *
Jetzt wurde die Missionsüberwachungsabteilung auf dem Cambridge Parkway 75 in einen größeren Raum verlegt. Am 20. Juli 1969 war der Raum trotz der Reinigungsbemühungen derjenigen von uns, die am meisten an dieser Phase der Mission beteiligt waren, überfüllt. Wir hörten eine Squaw-Box (Kommunikationsgerät) im Klassenzimmer, während eine Viertelmillion Meilen von hier entfernt ein bemanntes Raumschiff den Mond verließ und sich dem unteren Punkt seiner Umlaufbahn (Perilune) in einer Höhe von etwa 50.000 Fuß über den gepunkteten Kratern näherte Oberfläche und Landemotoren eingeschaltet.
Das Team tippte „Verb 37“ auf dem Computer ein, was die P63-Phase bedeutete, die Vorbereitung auf den kontrollierten Abstieg, und blieb im Befehlsmodul, bis der Motor verbrannt war. Der Computer führte einen Algorithmus aus, der die genaue Zündzeit und die Position berechnet, an der sich das Mondmodul zu diesem Zeitpunkt befinden sollte. Als nächstes dreht sich das Raumschiff in die gewünschte Position. Zum Zeitpunkt der Zündung sollte die Motordüse fast nach vorne gegen den Umlaufgeschwindigkeitsvektor des Schiffes gerichtet sein.
Jetzt gab der Computer einen Fehlercode von 500 aus. Er glaubte, dass sich die Radarantenne in der falschen Position befand. Das Team sah, dass sich die Schalter in der richtigen Position befanden, schaltete sie aber dennoch um und der Fehler verschwand. Dies hing nicht mit den Ereignissen zusammen, die als nächstes geschahen, sondern verstärkte unseren Verdacht, dass die Signale, die dem Computer die Position der Antenne oder der Schalter mitteilen, manchmal liegen.
Die Steuerung wird an das Programm BURNBABY übertragen, das Hauptprogramm zur Zündsteuerung, das wir nach LM-1 geschrieben haben, um Speicher zu sparen, indem ähnliche Algorithmen in der Zeit vor der Zündung verwendet werden. Auf DSKY wird "Verb 6, Substantiv 62" angezeigt. Das mittlere Register enthält die Zeit in Minuten und Sekunden, der Countdown bis zur Zündung beginnt. In 35 Sekunden erlischt die Anzeige, in 30 Sekunden leuchtet sie wieder auf. Dies ist ein Signal dafür, dass der Algorithmus „Average-G“ gestartet wurde. In 7,5 s beginnt das „schmutzige“ Brennen. 5 Sekunden vor dem Start blinkt die Anzeige und wartet auf den Startbefehl der Besatzung. Buzz Aldrin, der Pilot des Mondmoduls, steht rechts vom Cockpit und trägt die Hauptverantwortung für die Arbeit mit DSKY. Er drückt "PROCEED".
Zum Zeitpunkt 102: 33: 05 nach Beginn der Mission tritt selbstentzündlicher Kraftstoff in den Landemotor ein und wird mit einer Drosselrate von 10% gezündet. Armstrong spürte nicht einmal einen leichten Ruck - die Beschleunigung betrug weniger als 1/25 g. Die Anzeige hob das „Nomen 63“ hervor und die drei Registeranzeigen zeigen jetzt eine volle Geschwindigkeit von 5559,7 Fuß / s und eine vertikale Geschwindigkeit von -2,2 Fuß / s, eine Höhe über der Oberfläche von 49971 Fuß [8]. Die Motorlager richteten den Schubvektor des Landemotors im Massenmittelpunkt des Schiffes aus. 26 Sekunden nach der Zündung liefert die DPS-Software einen maximalen Schub von 43.900 N (9.870 Pfund), 94% der offiziell angekündigten 10.500 Pfund, und gleichzeitig beginnt das Landemanöver.
Der P63 war eine Bremsphase, deren einziger Zweck darin bestand, die vertikale Geschwindigkeit zu unterdrücken. Es endete 8 Minuten nachdem das Schiff die Endbedingungen erreicht hatte, die als "hohes Tor" bei 7.400 Fuß bekannt sind. Abb. 5 zeigt Phasen der Mondlandung.
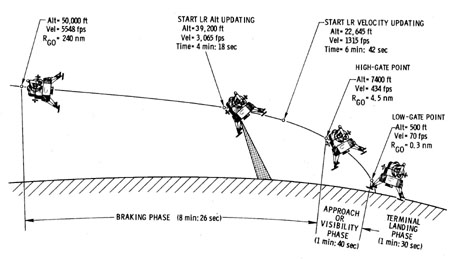
Abb. 5.
Phasen der Landung auf dem Mond (ungefähre Anzahl)Zum Zeitpunkt 102: 36: 55 von Beginn der Mission an stand Neil Armstrong, der Kommandant, auf der linken Seite des Mondmodul-Cockpits und drehte das Raumschiff mit dem Joystick um die Schubachse, so dass das Fenster des Raumfahrzeugs es den Astronauten ermöglichte, seitdem auf die Oberfläche hinunterzuschauen in dem Moment, als es in den Weltraum gerichtet war und die Erde darin sichtbar war. Aber das Schiff drehte sich zu langsam. Armstrong stellte die Geschwindigkeitsbegrenzung des Autopiloten von 5 ° / s auf 25 ° / s um [9]. Unmittelbar vor diesem Manöver signalisierte das Landeradar "Daten sind normal".
Es ist unmöglich, so genau zu navigieren, dass man sicher auf der Mondoberfläche landet, ohne die aktuelle Entfernung und Geschwindigkeit zu kennen. Diese Informationen werden vom Landeradar bereitgestellt. Trotz der von der Software durchgeführten Wahrscheinlichkeitsprüfungen konnten die Radardaten ohne Bestätigung des Befehls und der Flugsteuerzentrale nicht in den Zustandsvektor aufgenommen werden. Ungefähr fünf Minuten nach der Zündung gab Aldrin "Verb 16, Substantiv 68" ein - eine Aufforderung zur Anzeige des "Substantivs", in der das dritte Register den Unterschied zwischen der Höhe, die das Radar sieht, und dem berechneten Computer anzeigt. Diese Variable, DELTAH genannt, war ungefähr -2900 Fuß. Dies lag innerhalb der Fehlergrenze. Die Radardaten wurden in das Navigationssystem eingegeben, ohne die Flugbahn nachteilig zu beeinflussen.
Dann hörten wir die Worte "Software-Warnung". In Cambridge haben wir uns angesehen. An Bord des Raumfahrzeugs sah Aldrin, wie das PROG-Signal aufleuchtete und auf dem Display erneut „Verb 6, Substantiv 63“ angezeigt wurde. Er drückte schnell "Verb 5 Nomen 9".
Der Warncode 1202 erschien auf der DSKY-Anzeige. Diese Warnung erschien, wenn der Computer überlastet war, d. H. Es werden mehr Aufgaben ausgeführt, als genügend Zeit für sie vorhanden ist. In Cambridge sagten sie: "Warnung vor Hinrichtung, es gibt keinen Platz in der Erinnerung." Armstrong sagte dann mit Härte: "Geben Sie uns Anweisungen zur Warnung 1202" [10].Die Ereignisse begannen sich schnell zu entwickeln, zu schnell, als dass wir Daten aus Cambridge übertragen könnten. Dies wurde von der Flugsicherung in Houston durchgeführt. Die Geschichte von dem, was als nächstes geschah, wurde oft wiederholt - was sagte der 26-jährige Offizier Steve Bales „weiter“ oder „abbrechen“. Bailes nahm an einer kürzlich durchgeführten Analyse von LGC-Alarmen teil, bei der beschlossen wurde, die Mission mit dem Fehler 1202 fortzusetzen, falls sie nicht zu häufig auftritt und die Flugbahn nicht von der berechneten abweicht. Er wurde von Jack Garman von der NASA und Russ Larson vom MIT im Hinterzimmer unterstützt. Garman sagte "weiter" und Signalmann Charlie Duke gab seine Worte an die Besatzung des Schiffes weiter. Als wir am MIT feststellten, dass etwas Geheimnisvolles Computerzeit verschwendete, saßen wir mit angehaltenem Atem da.Zwischen dem Auftreten des Fehlersignals und der Antwort „Weiter“ aus Houston verging eine halbe Minute. Während dieser Zeit überprüfte das Flugkontrollzentrum den DELTAH-Wert und Aldrin wählte „57“, einen Code, mit dem das Navigationssystem Radardaten empfangen kann. Dann versuchte er erneut, „Verb 16, Substantiv 68“ einzugeben und sah, wie DELTAH auf 900 Fuß abnahm. Das Fehlersignal blinkte erneut. Wieder leuchtete "Verb 5 Nomen 9 - 1202". Wieder von der Erde antworteten sie "weiter".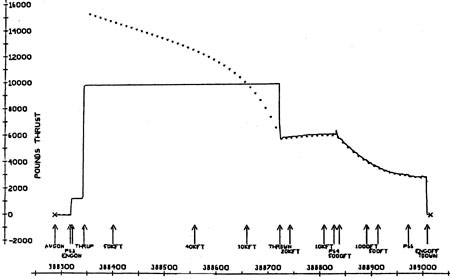
Abb.
6. Die erwartete (Punkte) und reale (durchgezogene Linie) Traktion im Landeprozess (Simulationsdaten)Flugzeit - 102: 39: 31, alles läuft so gut wie möglich - die Drosselklappe schließt pünktlich. „Aha! Der Gashebel schließt besser als im Simulator “, kommentierte Audrin. "Der Gashebel schließt pünktlich!", Rief Armstrong mit offensichtlicher Aufregung aus. In der offiziellen Abschrift der Gespräche zwischen dem Raumschiff und der Erde während der Landephase gibt es nur ein Ausrufezeichen - an dieser Stelle [11].Die Düse des Landemotors unterliegt einer starken Erosion, wenn im Modus von 65% bis maximalem Schub gearbeitet wird. Die Drosselklappe schließt, wenn der für die Landung erforderliche Schub auf ein Niveau reduziert wird, bei dem eine Rückkehr zum Maximalwert bis zum Ende der Bremsphase nicht mehr erforderlich ist. Wenn Sie den Gashebel sehr gut schließen, funktioniert das Steuerungssystem ordnungsgemäß. Es ist auch wahr, dass, wenn der Verschluss in der geöffneten Position stecken bleibt, die Mission unterbrochen werden muss, da das Schiff nach 40 Sekunden gemäß den Navigationsgleichungen eine Kurve machen muss.Während das Mondmodul nach vorne auf die Mondoberfläche gerichtet war, zählte Armstrong Orientierungspunkte aus, die darauf hinwiesen, dass das Modul mehr als erforderlich zurückgegangen war. Er stellte fest, dass der Computer nicht weiß, dass das Landemodul zu stark abgenommen hat [12]. Andernfalls würde der Motor länger bei maximalem Schub bleiben als tatsächlich passiert. Simulator des Mondmoduls.Missionszeit 102: 41: 32, das Schiff überquerte die Marke von 7400 Fuß und sank mit einer Geschwindigkeit von 125 Fuß / s ab, das "hohe Tor" wurde erreicht. Das Navigationssystem muss jetzt andere Aufgaben ausführen. Das Mondmodul ist nach vorne gerichtet, so dass die Mondoberfläche entlang des Kurses sichtbar ist. Auf DSKY zeigte das Modusregister 64, was "Sichtbarkeitsphase" bedeutete, und "Nomen 64" wurde in "Nomen 63" geändert. Anstelle der Geschwindigkeit werden jetzt zwei zweistellige Zahlen in Großbuchstaben angezeigt. Eine davon ist die Bezeichnung des Landepunkts (LPD), ein Winkel, der angibt, welche Markierung auf dem Fenster Armstrong sehen soll, um zu sehen, wo das Schiff landen wird, wenn eine automatische Landung zulässig ist. Das Leitsystem kontrollierte das Gieren, um den Landeplatz entlang der Sichtlinie zu halten.Die Besatzung kann den Landeplatz mit einer Handsteuerung wechseln. (Armstrong sagte vor dem Flug, dass er diese Gelegenheit nicht nutzen wolle, aber anscheinend dauerte die „Phase der Sichtbarkeit“ zu lange). Die zweite Zahl zeigte die verbleibende Zeit an, während der der Landeplatz geändert werden konnte. In dieser Phase ist ein Algorithmus enthalten, mit dem Sie den Landeplatz ändern können. Es war die stressigste Landezeit.Missionszeit 102: 42: 17, Fehler 1201 tritt erneut auf. Executive-Fehler ( Computersystemsoftware bestand aus zwei Subsystemen: Executive - Echtzeitbetriebssystem und The Interpreter - virtuelle Maschine, tatsächlich ein Interpreter von Befehlen zum Arbeiten mit Zahlen mit doppelter Genauigkeit. ) - Es gibt keinen freien Speicher. Nach ca. 24 Sekunden erneut Fehler 1202. Das Kontrollzentrum in Houston sagt in beiden Fällen "Weiter". Neil Armstrong, dessen Herz in dieser Zeit 120 bis 150 Schläge schlug [13], befolgte diese Anweisungen.
Simulator des Mondmoduls.Missionszeit 102: 41: 32, das Schiff überquerte die Marke von 7400 Fuß und sank mit einer Geschwindigkeit von 125 Fuß / s ab, das "hohe Tor" wurde erreicht. Das Navigationssystem muss jetzt andere Aufgaben ausführen. Das Mondmodul ist nach vorne gerichtet, so dass die Mondoberfläche entlang des Kurses sichtbar ist. Auf DSKY zeigte das Modusregister 64, was "Sichtbarkeitsphase" bedeutete, und "Nomen 64" wurde in "Nomen 63" geändert. Anstelle der Geschwindigkeit werden jetzt zwei zweistellige Zahlen in Großbuchstaben angezeigt. Eine davon ist die Bezeichnung des Landepunkts (LPD), ein Winkel, der angibt, welche Markierung auf dem Fenster Armstrong sehen soll, um zu sehen, wo das Schiff landen wird, wenn eine automatische Landung zulässig ist. Das Leitsystem kontrollierte das Gieren, um den Landeplatz entlang der Sichtlinie zu halten.Die Besatzung kann den Landeplatz mit einer Handsteuerung wechseln. (Armstrong sagte vor dem Flug, dass er diese Gelegenheit nicht nutzen wolle, aber anscheinend dauerte die „Phase der Sichtbarkeit“ zu lange). Die zweite Zahl zeigte die verbleibende Zeit an, während der der Landeplatz geändert werden konnte. In dieser Phase ist ein Algorithmus enthalten, mit dem Sie den Landeplatz ändern können. Es war die stressigste Landezeit.Missionszeit 102: 42: 17, Fehler 1201 tritt erneut auf. Executive-Fehler ( Computersystemsoftware bestand aus zwei Subsystemen: Executive - Echtzeitbetriebssystem und The Interpreter - virtuelle Maschine, tatsächlich ein Interpreter von Befehlen zum Arbeiten mit Zahlen mit doppelter Genauigkeit. ) - Es gibt keinen freien Speicher. Nach ca. 24 Sekunden erneut Fehler 1202. Das Kontrollzentrum in Houston sagt in beiden Fällen "Weiter". Neil Armstrong, dessen Herz in dieser Zeit 120 bis 150 Schläge schlug [13], befolgte diese Anweisungen., , .. 64 , LPD. , , , . , , , . , , , .
Armstrong konnte jedoch feststellen, dass das LPD-System zeigte, dass „wir in der Nähe eines großen felsigen Kraters mit sehr großen Steinen landen, die den größten Teil der Oberfläche bedecken“ [15]. Zum Zeitpunkt von 102: 43: 08 vom Beginn der Mission (Höhe 650 Fuß) stellte Armstrong daher fest, dass er nicht in der Nähe des Kraters sitzen konnte, und schaltete den Autopilot-Modusschalter von AUTO auf ATT HOLD, um die Position des Mondmoduls manuell zu steuern. Er manövrierte mit einem Winkel von Null, um die horizontale Geschwindigkeit aufrechtzuerhalten, und fuhr über felsiges Gelände.(ATT HOLD bedeutete, dass der digitale Autopilot die Fluggeschwindigkeit im Attitude-Hold-Modus steuerte, in dem der Astronaut die Fluggeschwindigkeit durch Auslenken des Joysticks steuern konnte. Nachdem der Joystickgriff losgelassen wurde, setzt der Autopilot die Geschwindigkeit auf Null, um seine aktuelle Position beizubehalten.)Missionszeit 102: 43: 20, Höhe 430 Fuß, Armstrong schaltete den Eingangs-Kippschalter mit der linken Hand (P66) in den Modus zur Steuerung der Abstiegsgeschwindigkeit. Der Computer steuerte nun den Schiffsschub, um die vom ROD-Schalter gesteuerte Sinkgeschwindigkeit aufrechtzuerhalten. Das Hochbewegen des Schalters verlangsamte sich um einen Fuß pro Sekunde. Die Abwärtsbewegung erhöhte die Abstiegsgeschwindigkeit um den gleichen Betrag. Mit dem Joystick kippte Armstrong das Modul auf horizontale Geschwindigkeit Null und schickte es an einen sicheren Ort zur Landung. Nach mehreren „möglicherweise unfreiwilligen“ Steuerbewegungen aufgrund der Tatsache, dass der durch den Auspuff des Motors aufgewirbelte Staub seine Wahrnehmung der Geschwindigkeit verzerrte, landete Armstrong um 102: 45: 40 Uhr ein Raumschiff im Meer der Ruhe.