Um die Robotererfassung zuverlässiger zu machen, entwickeln Forscher Objekte, deren Manipulation so komplex wie möglich ist.
 Inspiriert vom Konzept der Wettbewerbsbilder untersuchen Forscher der University of California in Berkeley physische Wettbewerbsobjekte, die sorgfältig so konstruiert sind, dass sie mit Standard-Robotergriffen nur schwer erfasst werden können
Inspiriert vom Konzept der Wettbewerbsbilder untersuchen Forscher der University of California in Berkeley physische Wettbewerbsobjekte, die sorgfältig so konstruiert sind, dass sie mit Standard-Robotergriffen nur schwer erfasst werden könnenIn letzter Zeit ist eine große Menge an Forschung zum Thema "Wettbewerbsbilder" erschienen, bei denen es sich um Bilder von Objekten handelt, die so modifiziert sind, dass es für Computer-Vision-Algorithmen besonders schwierig ist, sie zu erkennen. Die Idee ist, diese Bilder zu verwenden, um robustere Computer-Vision-Algorithmen zu entwickeln, da ihre "kontroverse" Natur eine speziell implementierte "Worst-Case" -Option ist - und wenn Ihr Algorithmus mit kontroversen Bildern umgehen kann, wird er wahrscheinlich die meisten verarbeiten andere Aufgaben.
Forscher des Labors für Automatisierung und Technik (
AUTOLAB ) der University of California in Berkeley unter der Leitung von Professor Ken Goldberg haben dieses Konzept auf Robotergriffe ausgeweitet. Sie entwarfen speziell physische Wettbewerbsobjekte, so dass sie mit herkömmlichen Roboterarmen nur schwer zu heben waren. Die üblichen dreidimensionalen Figuren müssen nur geringfügig korrigiert werden, und der Standard-Zweifingergriff stößt auf alle möglichen Schwierigkeiten, wenn versucht wird, das Objekt richtig zu erfassen.
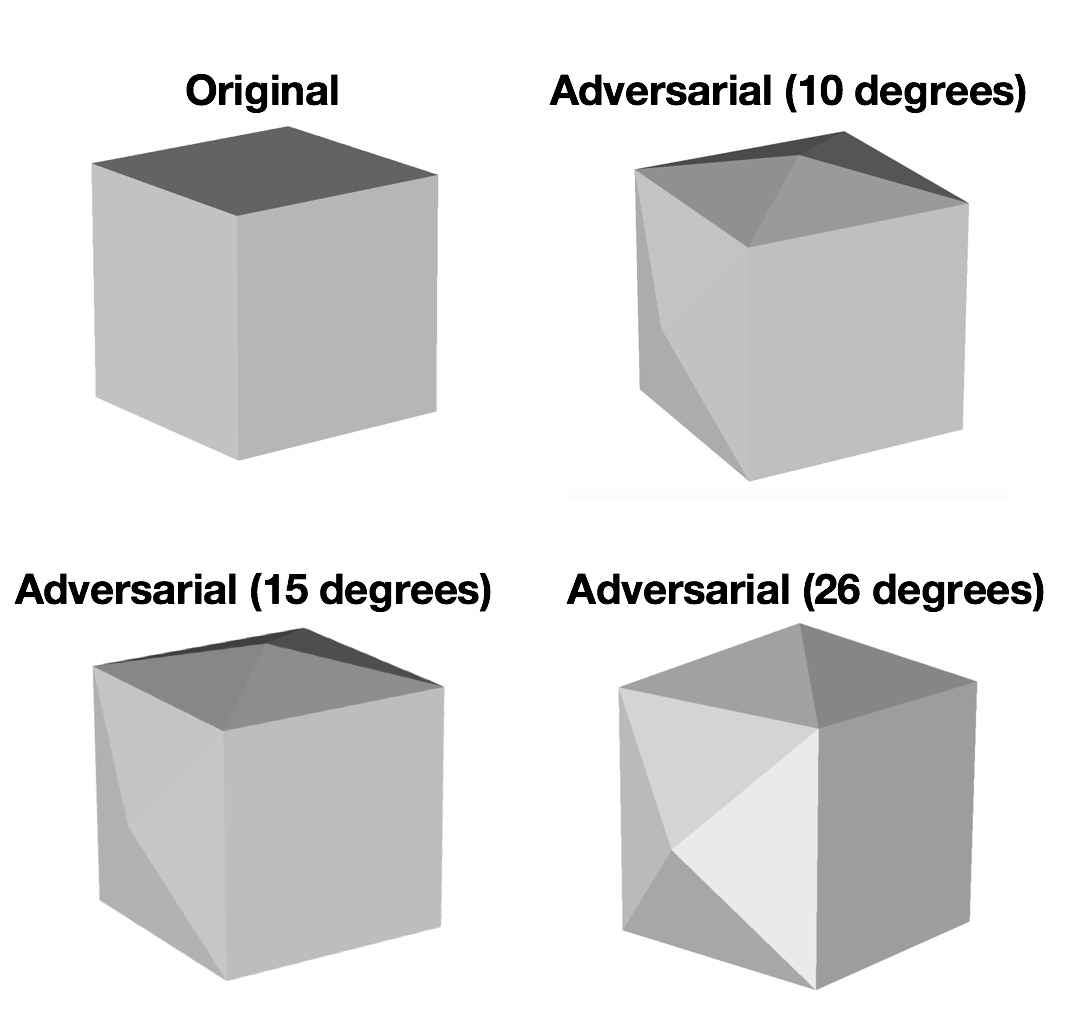 Ausgehend von einem Würfel entwickelt sich ein Konkurrenzobjekt, das mit einer Zwei-Finger-Klammer immer schwieriger zu erfassen ist. Wenn versucht wird, eine eckige Oberfläche zusammenzudrücken, dreht sich das Objekt und rutscht heraus.
Ausgehend von einem Würfel entwickelt sich ein Konkurrenzobjekt, das mit einer Zwei-Finger-Klammer immer schwieriger zu erfassen ist. Wenn versucht wird, eine eckige Oberfläche zusammenzudrücken, dreht sich das Objekt und rutscht heraus.Das Hauptmerkmal dieser Wettbewerbsobjekte ist, dass sie so aussehen, als wären sie leicht zu greifen, aber mit mindestens einer Zwei-Finger-Klammer stellt sich heraus, dass es schwierig ist. Der Unterschied zwischen dem Aussehen der Objekte und ihrer tatsächlichen Geometrie ist unbedeutend: In einem Beispiel handelt es sich um einen Würfel mit niedrigen Pyramiden auf drei der sechs Seiten - die kleinste von ihnen hat einen Neigungswinkel der Kanten von nur 10 Grad. Und gegenüber jeder Pyramide befindet sich eine gewöhnliche flache Fläche, daher hat der Würfel keine gegenüberliegenden flachen Flächen. Aus diesem Grund treten bei den Zwei-Finger-Griffen, die an der Klemme von Objekten arbeiten, Probleme auf. Wenn Sie versuchen, die Oberfläche in einem Winkel zu klemmen, führt die Druckkraft dazu, dass sich das Objekt dreht und es häufig aus der Klemme fällt.
 Die parallele Erfassung mit Punktkontakten erfasst erfolgreich einen regulären Würfel (links) und kann einen von Forschern entwickelten Wettbewerbswürfel (rechts) nicht bewältigen.
Die parallele Erfassung mit Punktkontakten erfasst erfolgreich einen regulären Würfel (links) und kann einen von Forschern entwickelten Wettbewerbswürfel (rechts) nicht bewältigen.Capture-Planer suchen häufig nach glatten gegenüberliegenden Oberflächen, die geklemmt werden können. Da der Unterschied zwischen einem wettbewerbsfähigen und einem normalen Würfel klein genug ist, um einen 3D-Sensor zu übersehen, werden die meisten Robotersysteme denken: „Oh, das ist ein Würfel, es ist sehr einfach ! " Und dann werden sie die Aufgabe sicherlich nicht bestehen, wenn der Würfel herauskommt und aus ihrem Griff rutscht.
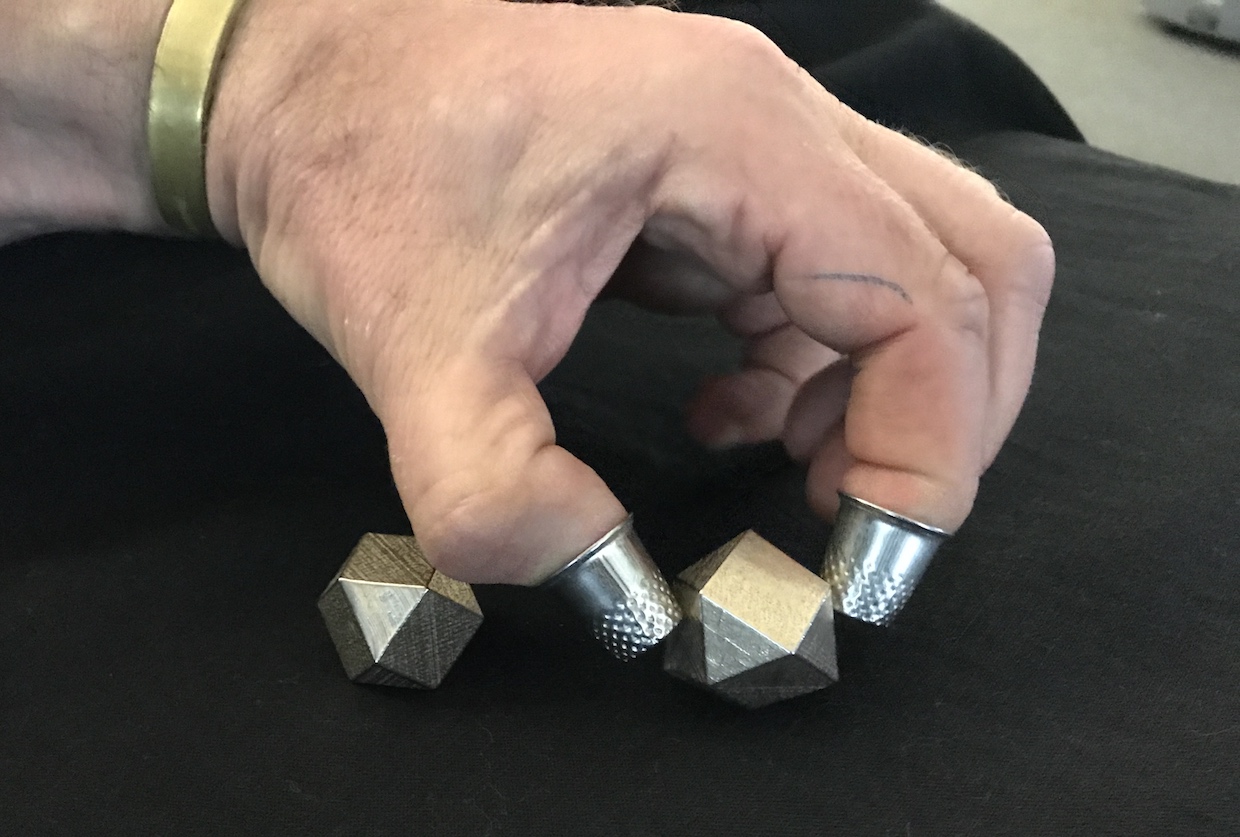 Widersprüchliche Formen wirken auch beim Menschen - mit Fingerhüten, die den kalten, unempfindlichen Stahl des Roboters emulieren, und mit zwei Fingern zum Festklemmen des Objekts bestätigten die Forscher, dass es schwierig ist, diese Objekte anzuheben
Widersprüchliche Formen wirken auch beim Menschen - mit Fingerhüten, die den kalten, unempfindlichen Stahl des Roboters emulieren, und mit zwei Fingern zum Festklemmen des Objekts bestätigten die Forscher, dass es schwierig ist, diese Objekte anzuhebenMit der zunehmenden Komplexität des Formulars wird es immer schwieriger, eine wettbewerbsfähige Version zu entwickeln. Mit dem Kuboktaeder (einem Polyeder mit acht dreieckigen und sechs quadratischen Flächen) änderten die Forscher die Eckpunkte der Figur (in der Simulation) zufällig, bis sie eine Form erhielten, die keine direkt gegenüberliegenden Flächen aufweist. Und für komplexere Formen, wie sich kreuzende Zylinder, wurden Wettbewerbsbeispiele unter Verwendung des Deep-Learning-Algorithmus erhalten.
 Für komplexere Formen, wie z. B. sich kreuzende Zylinder, wurden Wettbewerbsbeispiele unter Verwendung von Deep-Learning-Algorithmen erhalten
Für komplexere Formen, wie z. B. sich kreuzende Zylinder, wurden Wettbewerbsbeispiele unter Verwendung von Deep-Learning-Algorithmen erhaltenIn
Vorversuchen in der realen Welt wurde durch parallele Punkterfassung versucht, einige dieser kontroversen Objekte anzuheben. In jedem Fall betrug die geschätzte Wahrscheinlichkeit, das Objekt zu erfassen, 100% (basierend auf der in der Simulation getesteten
Dex-Net- Richtlinie). Tatsächlich stellte sich jedoch heraus, dass erfolgreiche Erfassungen von Wettbewerbswürfeln und Kuboktaedern nur in 13% der Fälle erfolgreich waren.
Die Forscher planen, diese Objekte mit verschiedenen Arten von Griffen sowie mit Vakuumgriffen zu testen, um festzustellen, ob sie die wettbewerbsfähigsten Objekte von allen herstellen können. Und denken Sie daran, dass das Ziel all dessen nicht nur darin besteht, die unglücklichen Erfassungsalgorithmen zu täuschen, sondern Tools zu entwickeln, mit denen die Robotererfassung für die reale Welt (hoffentlich) ausreichend zuverlässig funktioniert.