 Quelle: xkcd
Quelle: xkcdDie lineare Regression ist einer der grundlegenden Algorithmen für viele Bereiche der Datenanalyse. Der Grund dafür liegt auf der Hand. Dies ist ein sehr einfacher und verständlicher Algorithmus, der seit vielen zehn, wenn nicht Hunderten von Jahren zu seiner weit verbreiteten Verwendung beigetragen hat. Die Idee ist, dass wir eine lineare Abhängigkeit einer Variablen von einer Reihe anderer Variablen annehmen und dann versuchen, diese Abhängigkeit wiederherzustellen.
In diesem Artikel geht es jedoch nicht um die Anwendung der linearen Regression zur Lösung praktischer Probleme. Hier werden wir interessante Funktionen der Implementierung verteilter Algorithmen für deren Wiederherstellung diskutieren, die beim Schreiben eines maschinellen Lernmoduls in
Apache Ignite aufgetreten sind. Ein wenig grundlegende Mathematik, die Grundlagen des maschinellen Lernens und des verteilten Rechnens helfen Ihnen dabei, herauszufinden, wie Sie die lineare Regression wiederherstellen können, selbst wenn die Daten auf Tausende von Knoten verteilt sind.
Worüber sprichst du?
Wir stehen vor der Aufgabe, die lineare Abhängigkeit wiederherzustellen. Als Eingabe werden viele Vektoren vermeintlich unabhängiger Variablen angegeben, von denen jeder einem bestimmten Wert der abhängigen Variablen zugeordnet ist. Diese Daten können in Form von zwei Matrizen dargestellt werden:
\ begin {pmatrix} a_ {11} & a_ {12} & a_ {13} & ... & a_ {1n} \\ a_ {21} & a_ {22} & a_ {23} & ... & a_ {2n} \\ ... \\ a_ {m1} & a_ {m2} & a_ {m3} & ... & a_ {mn} \\ \ end {pmatrix} \ begin {pmatrix} b_ {1} \\ b_ {2} \\ ... \\ b_ {m} \\ \ end {pmatrix}
Da nun die Abhängigkeit angenommen wird und außerdem linear ist, schreiben wir unsere Annahme in Form eines Matrizenprodukts auf (um die Notation hier und unten zu vereinfachen, wird angenommen, dass der freie Term der Gleichung dahinter verborgen ist
und die letzte Spalte der Matrix
enthält Einheiten):
\ begin {pmatrix} a_ {11} & a_ {12} & a_ {13} & ... & a_ {1n} \\ a_ {21} & a_ {22} & a_ {23} & ... & a_ {2n} \\ ... \\ a_ {m1} & a_ {m2} & a_ {m3} & ... & a_ {mn} \\ \ end {pmatrix} \ times \ begin {pmatrix} x_ { 1} \\ x_ {2} \\ ... \\ x_ {n} \\ \ end {pmatrix} = \ begin {pmatrix} b_ {1} \\ b_ {2} \\ ... \\ b_ {m} \\ \ end {pmatrix}
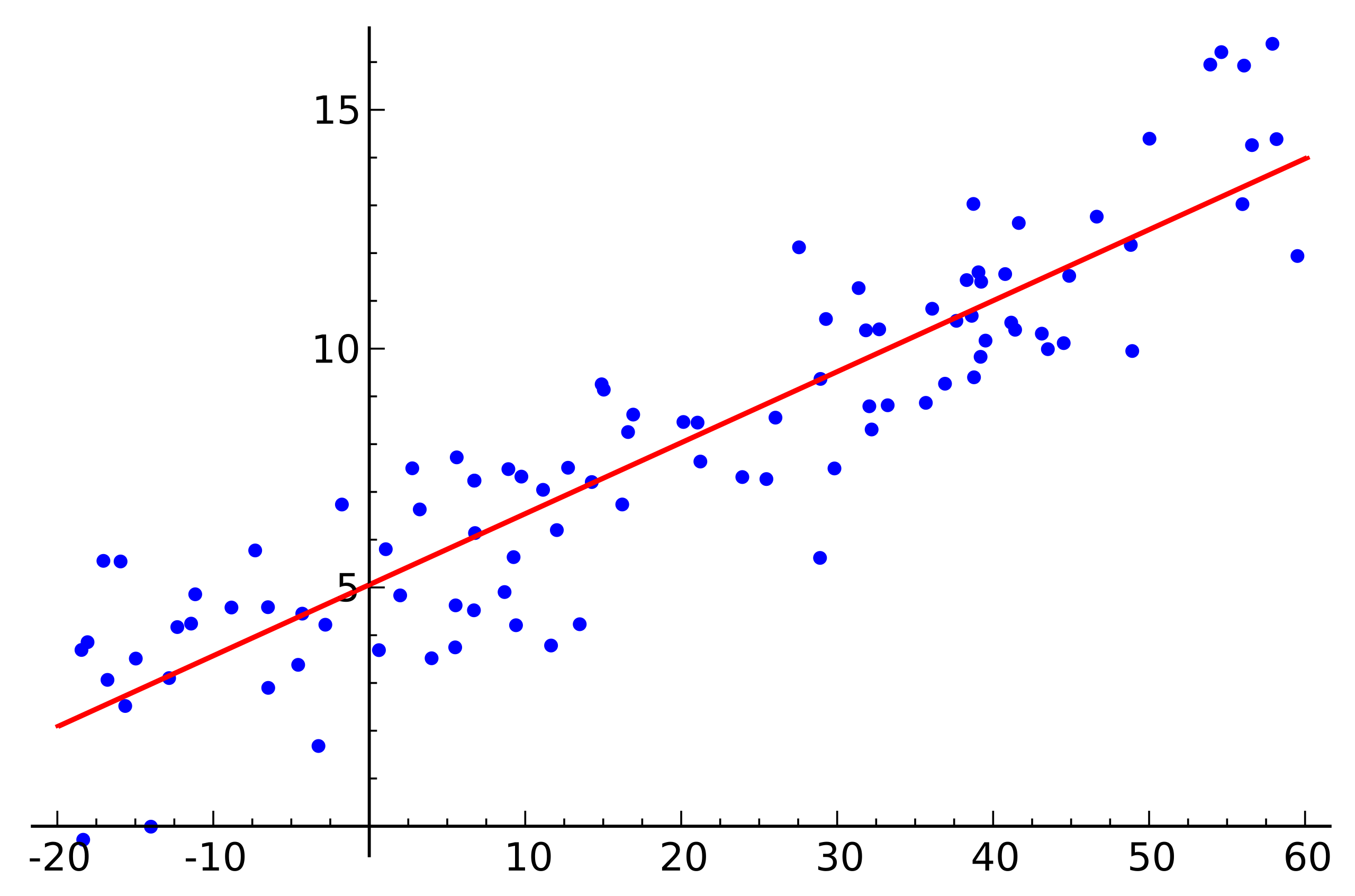
Sehr ähnlich einem linearen Gleichungssystem, oder? Es scheint, aber höchstwahrscheinlich wird es keine Lösungen für ein solches Gleichungssystem geben. Der Grund dafür ist das Rauschen, das in fast allen realen Daten vorhanden ist. Der Grund kann auch das Fehlen einer linearen Beziehung als solche sein, die Sie bekämpfen können, indem Sie zusätzliche Variablen einführen, die nichtlinear von der Quelle abhängen. Betrachten Sie das folgende Beispiel:
 Quelle: Wikipedia
Quelle: WikipediaDies ist ein einfaches lineares Regressionsbeispiel, das die Abhängigkeit einer Variablen (entlang der Achse) zeigt
) von einer anderen Variablen (entlang der Achse
) Damit das diesem Beispiel entsprechende lineare Gleichungssystem eine Lösung hat, müssen alle Punkte genau auf einer geraden Linie liegen. Aber das ist nicht so. Sie liegen jedoch nicht gerade aufgrund von Rauschen auf einer geraden Linie (oder weil die Annahme des Vorhandenseins einer linearen Abhängigkeit falsch war). Um eine lineare Abhängigkeit von realen Daten wiederherzustellen, ist es normalerweise notwendig, eine weitere Annahme einzuführen: Die Eingabedaten enthalten Rauschen und dieses Rauschen hat eine
Normalverteilung . Man kann Annahmen über andere Arten der Geräuschverteilung treffen, aber in den allermeisten Fällen wird später auf die Normalverteilung eingegangen.
Maximum-Likelihood-Methode
Wir haben also angenommen, dass zufälliges normalverteiltes Rauschen vorhanden ist. Wie kann man in einer solchen Situation sein? Für diesen Fall gibt es in der Mathematik
die Maximum-Likelihood-Methode, die weit verbreitet ist. Kurz gesagt, sein Wesen liegt in der Wahl
der Wahrscheinlichkeitsfunktion und ihrer anschließenden Maximierung.
Wir kehren zur Wiederherstellung der linearen Abhängigkeit von Daten mit normalem Rauschen zurück. Beachten Sie, dass die angenommene lineare Beziehung eine mathematische Erwartung ist
verfügbare Normalverteilung. Gleichzeitig ist die Wahrscheinlichkeit, dass
nimmt den einen oder anderen Wert an, sofern Observable vorhanden sind
sieht wie folgt aus:
Wir ersetzen jetzt stattdessen
und
Variablen, die wir brauchen:
Es bleibt nur der Vektor zu finden
bei der diese Wahrscheinlichkeit maximal ist. Um eine solche Funktion zu maximieren, ist es zweckmäßig, zuerst den Prologarithmus zu verwenden (der Logarithmus der Funktion erreicht sein Maximum an derselben Stelle wie die Funktion selbst):
Was wiederum darauf hinausläuft, die folgende Funktion zu minimieren:
Dies wird übrigens als Methode der
kleinsten Quadrate bezeichnet. Oft werden alle oben genannten Überlegungen weggelassen und diese Methode wird einfach verwendet.
QR-Zersetzung
Das Minimum der obigen Funktion kann gefunden werden, wenn Sie den Punkt finden, an dem der Gradient dieser Funktion gleich Null ist. Und der Farbverlauf wird wie folgt geschrieben:
Die QR-Zerlegung ist eine Matrixmethode zur Lösung des Minimierungsproblems, das bei der Methode der kleinsten Quadrate verwendet wird. In dieser Hinsicht schreiben wir die Gleichung in Matrixform um:
Also legen wir die Matrix an
auf Matrizen
und
und führen Sie eine Reihe von Transformationen durch (der QR-Zerlegungsalgorithmus selbst wird hier nicht berücksichtigt, sondern nur seine Verwendung in Bezug auf die Aufgabe):
\ begin {align} & (QR) ^ T (QR) x = (QR) ^ Tb; \\ & R ^ T Q ^ T Q R x = R ^ T Q ^ T b; \\ \ end {align}
Matrix
ist orthogonal. Dies ermöglicht es uns, die Arbeit loszuwerden.
::
\ begin {align} & R ^ T R x = R ^ T Q ^ T b; \\ & (R ^ T) ^ {- 1} R ^ T R x = (R ^ T) ^ {- 1} R ^ T Q ^ T b; \\ & R x = Q ^ T b. \ end {align}
Und wenn Sie ersetzen
auf
es wird sich herausstellen
. Angesichts dessen
ist die obere Dreiecksmatrix, es sieht so aus:
\ begin {pmatrix} r_ {11} & r_ {12} & r_ {13} & r_ {14} & ... & r_ {1n} \\ 0 & r_ {22} & r_ {23} & r_ { 24} & ... & r_ {2n} \\ 0 & 0 & r_ {33} & r_ {34} & ... & r_ {3n} \\ 0 & 0 & 0 & r_ {44} & .. . & r_ {4n} \\ ... \\ 0 & 0 & 0 & 0 & ... & r_ {nn} \\ \ end {pmatrix} \ times \ begin {pmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \\ ... \\ x_n \ end {pmatrix} = \ begin {pmatrix} z_1 \\ z_2 \\ z_3 \\ z_4 \\ ... \\ z_n \ end {pmatrix}
Dies kann durch die Substitutionsmethode gelöst werden. Artikel
ist wie
vorheriger Artikel
ist wie
usw.
Es ist hier anzumerken, dass die Komplexität des resultierenden Algorithmus durch die Verwendung der QR-Zerlegung ist
. Darüber hinaus ist es trotz der Tatsache, dass die Matrixmultiplikationsoperation gut parallelisiert ist, nicht möglich, eine effektive verteilte Version dieses Algorithmus zu schreiben.
Gefälle Abstieg
Wenn man über die Minimierung einer bestimmten Funktion spricht, lohnt es sich immer, an die Methode des (stochastischen) Gradientenabfalls zu erinnern. Dies ist eine einfache und effektive Minimierungsmethode, bei der der Gradient einer Funktion an einem Punkt iterativ berechnet und dann auf die dem Gradienten gegenüberliegende Seite verschoben wird. Jeder dieser Schritte bringt die Lösung auf ein Minimum. Der Farbverlauf sieht gleich aus:
Diese Methode ist aufgrund der linearen Eigenschaften des Gradientenoperators auch gut parallelisiert und verteilt. Beachten Sie, dass in der obigen Formel unabhängige Begriffe unter dem Vorzeichen der Summe stehen. Mit anderen Worten, wir können den Gradienten unabhängig für alle Indizes berechnen
von zuerst bis
Berechnen Sie parallel dazu den Gradienten für Indizes mit
vorher
. Fügen Sie dann die resultierenden Verläufe hinzu. Das Ergebnis der Addition ist das gleiche, als hätten wir sofort den Gradienten für die Indizes vom ersten bis zum berechnet
. Wenn also die Daten auf mehrere Teile der Daten verteilt sind, kann der Gradient für jeden Teil unabhängig berechnet werden, und dann können die Ergebnisse dieser Berechnungen summiert werden, um das Endergebnis zu erhalten:
In Bezug auf die Implementierung passt dies in das
MapReduce- Paradigma. Bei jedem Schritt des Gradientenabfalls wird eine Aufgabe zum Berechnen des Gradienten an jeden Datenknoten gesendet, dann werden die berechneten Gradienten zusammen gesammelt und das Ergebnis ihrer Summierung wird verwendet, um das Ergebnis zu verbessern.
Trotz der Einfachheit der Implementierung und der Fähigkeit, das MapReduce-Paradigma auszuführen, hat der Gradientenabstieg auch seine Nachteile. Insbesondere ist die Anzahl der Schritte, die erforderlich sind, um eine Konvergenz zu erreichen, im Vergleich zu anderen spezialisierteren Methoden erheblich größer.
LSQR
LSQR ist eine weitere Methode zur Lösung des Problems, die sowohl zur Rekonstruktion der linearen Regression als auch zur Lösung linearer Gleichungssysteme geeignet ist. Das Hauptmerkmal ist, dass es die Vorteile von Matrixmethoden und einen iterativen Ansatz kombiniert. Implementierungen dieser Methode finden Sie sowohl in der
SciPy- Bibliothek als auch in
MATLAB . Eine Beschreibung dieser Methode wird hier nicht gegeben (sie ist im
LSQR- Artikel zu finden
: Ein Algorithmus für spärliche lineare Gleichungen und spärliche kleinste Quadrate ). Stattdessen wird ein Ansatz demonstriert, um den LSQR an die Ausführung in einer verteilten Umgebung anzupassen.
Die LSQR-Methode basiert auf dem Bidiagonalisierungsverfahren. Dies ist eine iterative Prozedur, deren Iteration aus den folgenden Schritten besteht:
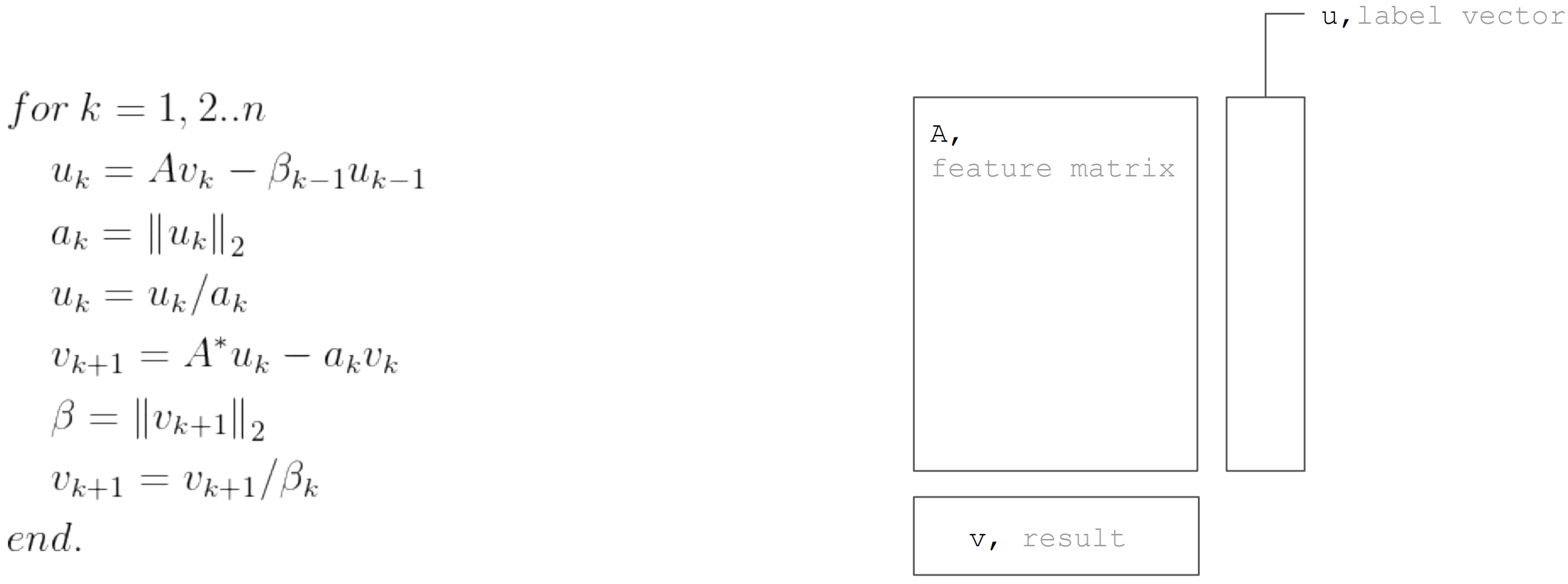
Aber basierend auf der Tatsache, dass die Matrix
horizontal partitioniert, kann jede Iteration als MapReduce in zwei Schritten dargestellt werden. Somit ist es möglich, die Datenübertragungen während jeder Iteration zu minimieren (nur Vektoren mit einer Länge, die der Anzahl der Unbekannten entspricht):
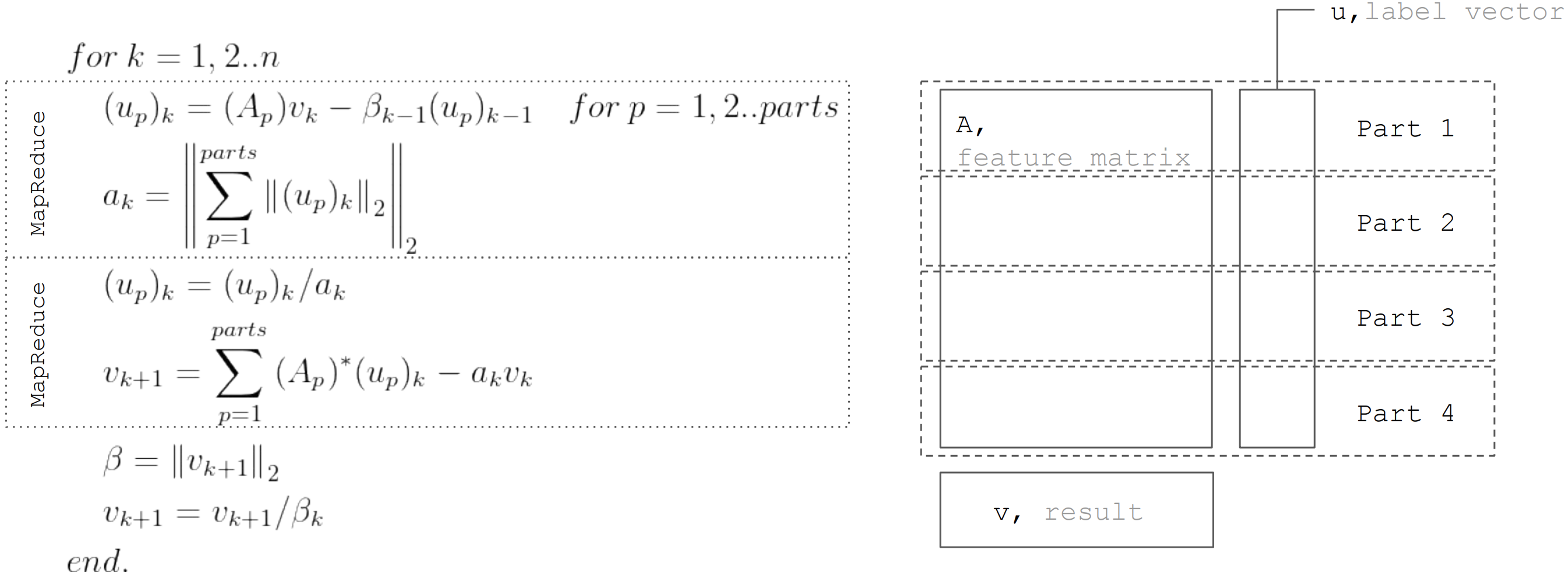
Dieser Ansatz wird bei der Implementierung der linearen Regression in
Apache Ignite ML verwendet .
Fazit
Es gibt viele lineare Regressionswiederherstellungsalgorithmen, aber nicht alle können unter allen Bedingungen angewendet werden. Die QR-Zerlegung eignet sich daher hervorragend für eine genaue Lösung kleiner Arrays. Der Gradientenabstieg wird einfach implementiert und ermöglicht es Ihnen, schnell eine ungefähre Lösung zu finden. Und LSQR kombiniert die besten Eigenschaften der beiden vorherigen Algorithmen, da es verteilt werden kann, im Vergleich zum Gradientenabstieg schneller konvergiert und im Gegensatz zur QR-Zerlegung auch ein vorzeitiges Stoppen des Algorithmus ermöglicht, um eine ungefähre Lösung zu finden.