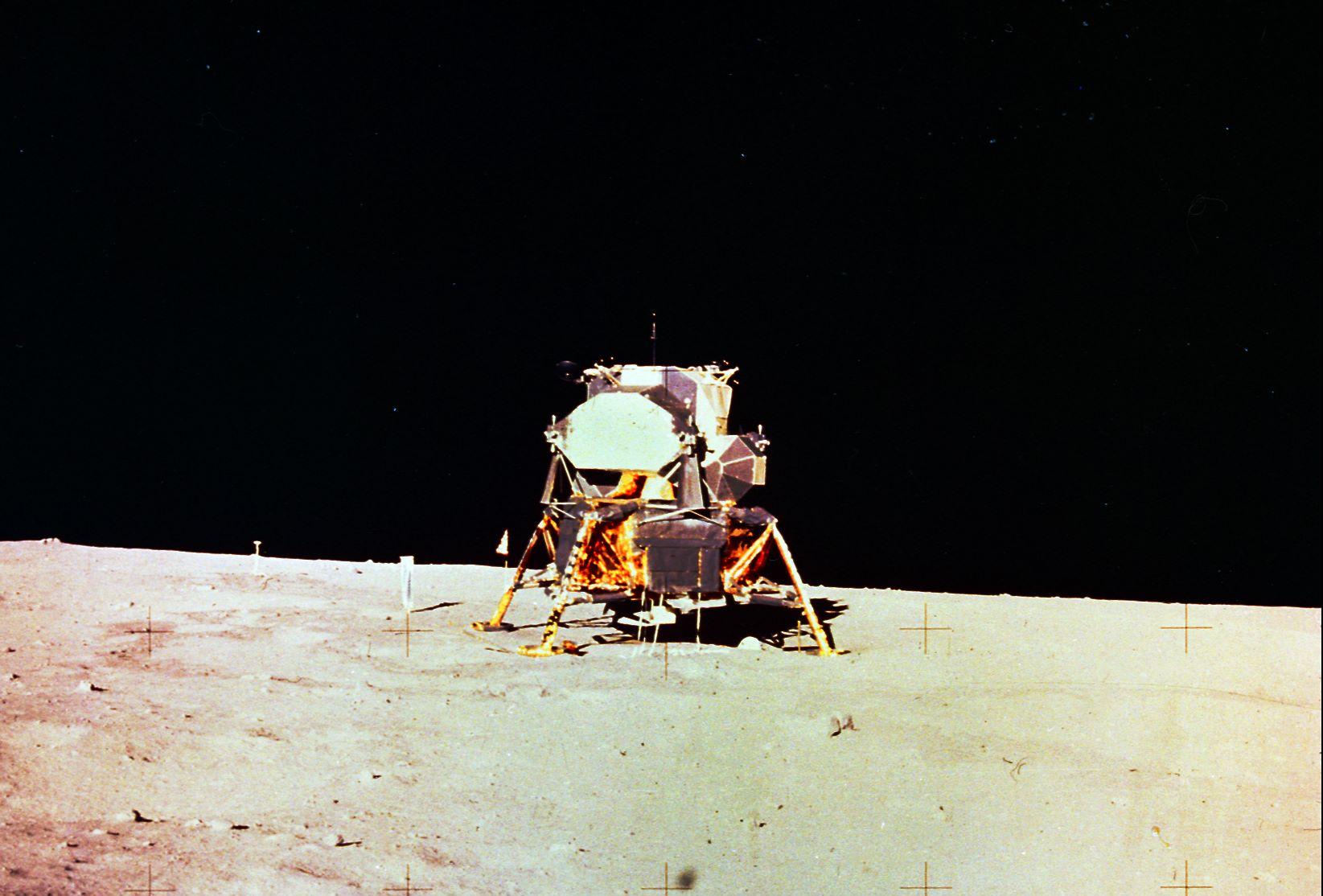
 Apollo 11 auf dem Mond
Apollo 11 auf dem MondFünf Monate später überlebte Apollo 12 einen Blitz während der Beschleunigung und saß auf dem Mond. Dank des neuen „Substantivs 69“, das wir dem Programm hinzugefügt haben, damit das Team seine Position basierend auf Bodenverfolgungsdaten ändern kann, konnten die Astronauten Pete Conrad und Alan Bean das Mondmodul in Gehweite des Unbemannten landen Das Schiff Surveyor, das im April 1967 auf dem Mond landete. Die präzise Landung von Apollo 12 ebnete den Weg für Landungen in einem komplexeren Gelände.
Erst nach Apollo 12 begannen wir andere ernsthafte Probleme zu verstehen.
Ich begann, als Clint Tillman von Grumman Aerospace (der Firma für den Bau von Mondmodulen) Drosselvibrationen bemerkte, während er die letzte Landestufe simulierte, als der Motorschub etwa 5% betrug. Dies veranlasste Tilman, die Telemetriedaten von Apollo 11 und 12 zu untersuchen, wo er Schwankungen im Endstadium der Landung mit einer Amplitude von 25% von Spitze zu Spitze feststellte (siehe Abb. 12). Dies war eine Zeit, in der der Schiffskommandant gleichzeitig den ROD-Schalter verwenden konnte, um die Abstiegsgeschwindigkeit zu steuern, und den Joystick, um das Schiff zu manövrieren. Da die Grafiken dieser Daten den Mauern und Türmen des Schlosses (oder der Burgmutter) ähnelten, wurde dieses Problem als "Drosselfestung" bezeichnet.
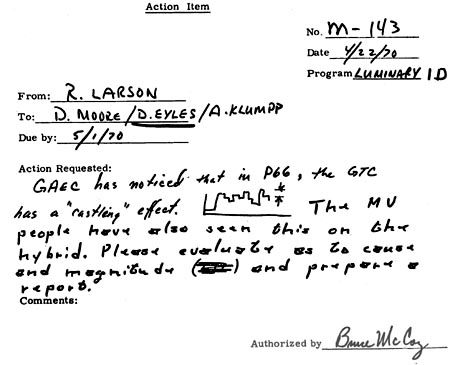
Abb. 11: Erster Drosselungsbericht
Clamp in Cambridge beschrieb eine Quelle der Anregung von Schwingungen zu einem unbekannten Phänomen, das er "IMU Bob" nannte [18]. Die IMU befand sich oben und vier Fuß vor dem Massenschwerpunkt des Schiffes. Kleine, aber schnelle Manöver, wie während der letzten Landung, warfen das Schiff so, dass die Beschleunigungsmesser dies als Änderung der vertikalen Geschwindigkeit des Schiffes interpretierten. Dies beeinflusste wiederum die Berechnung der Vertikalgeschwindigkeit und die Beurteilung der erforderlichen Traktion.
Diese Theorie erklärt jedoch nur teilweise das in Flugdaten beobachtete Drosselverhalten.
Drosselraketenmotoren waren und sind eine Seltenheit, aber für eine sanfte Landung auf dem Mond wurde ein Gasmotor benötigt. Ein Motor mit festem Schub und sehr einfache Bewegungsgleichungen können ein Schiff über den gewünschten Punkt auf der Mondoberfläche hinaus landen. Um jedoch kopfüber zu sitzen, sich reibungslos zu bewegen, den Landeplatz in der Sichtzone zu halten und die Möglichkeit zu haben, über dem Landeplatz zu schweben, brauchten wir einen Motor, der die Schwerkraft des Mondes ausgleichen, die Traktion ändern kann, wenn die Fahrzeugmasse abnimmt, und den Schubvektor während der Manöver ändert und als die Astronauten die Geschwindigkeit des Abstiegs ändern wollten.
Die Bewegungsgleichungen bestimmen, welche Beschleunigung der Vorrichtung mit welcher Größe und in welche Richtung gegeben werden soll. Der Autopilot führt Manöver durch, so dass die Zugkraft einer bestimmten Richtung entspricht. Die Aufgabe des Drosselklappensteuerprogramms besteht darin, die Traktion zu steuern. Die Drosselungssteuerung beginnt mit der Berechnung der Masse des Mondmoduls. In Kenntnis der Masse bestimmen wir den Betrag der Drosselklappenkorrektur, der erforderlich ist, um die Beschleunigung des Schiffes relativ zu der von Beschleunigungsmessern gemessenen auf den Wert zu ändern, der zur Einhaltung der Bewegungsgleichungen erforderlich ist, und konvertieren den resultierenden Wert in die von der Drosselklappenbaugruppe verwendeten Einheiten (etwa 2,8 Pfund pro Impuls). und senden Sie sie an die Hardware-Schnittstelle.
Die Beschleunigungsmesser in der IMU messen nicht die Beschleunigung, sondern das Geschwindigkeitsinkrement relativ zum letzten Messwert. Da Drosselungsänderungen während der vorherigen Iteration irgendwann zwischen den Ablesungen der Beschleunigungsmesser auftreten, zeigt das gemessene Delta-V nicht die volle Wirkung der letzten Änderung.
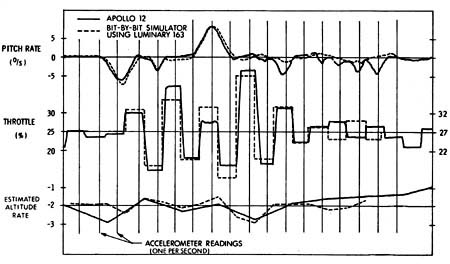
Abb. 12: Drosselungsänderungen während der P66-Phase des Apollo 12-Fluges [19]
Die Drosselklappensteuerung sollte diesen Effekt ausgleichen. Eine Reihe von Kompensationen hing davon ab, wann der Drosselbefehl während des Zeitraums gesendet wurde, und auch von der Geschwindigkeit, mit der der Motor Drosselbefehle ausführt. Experimentelle Studien haben gezeigt, dass die Drosselung eine Verzögerung von 0,3 s hat.
Dies ermöglichte es dem Autor, das Gassteuerungsprogramm zu programmieren und zu testen. In den Simulationsgraphen des exakten DPS-Modells mit einer Verzögerung von 0,3 s beobachtete ich Schwingungen im realen Schub, die nach einer großen Änderung der Drosselklappenposition auftraten, ohne die Drosselklappenverzögerung zu kompensieren. Als ich die Kompensation für 0,1 s einschaltete, sah ich, wie die Schwingungen abnahmen. Als ich die Kompensation auf 0,2 s einstellte, verschwanden die Schwingungen fast. Das war alles vorbei. Klump erinnerte sich, wie ich sagte: "Es ist wie ein Medikament, Sie müssen nicht mehr Entschädigung als nötig geben."
Klump wusste, dass es nicht „wie eine Heilung“ war, aber er bestand nie darauf, dass ich den richtigen Wert programmiere. Klump erklärt seine Motivation nach 15 Jahren und schreibt:
„Ich fand es wichtig, Selbstvertrauen aufzubauen, damit Kollegen Entscheidungen über kleine Probleme treffen können, auch wenn diese nicht optimal sind. Deshalb habe ich meine Gedanken zurückgehalten und die geltende Entscheidung von Don bestätigt, zumindest bis er sie selbst überarbeitet hat. “[20]
Wenn ich meine eigenen Motive erkläre, glaube ich, dass mich die Entschädigung im bereits überlasteten Drosselungsprogramm irritiert hat, und dies könnte zu dem Wunsch geführt haben, die Entschädigung so gering wie möglich zu halten. Wie dem auch sei, sowohl Apollo 11 als auch Apollo 12 flogen mit einer Kompensation von 0,2 s mit einer Drosselverzögerung von 0,3 s.
Nun kamen sowohl Klumps Analyse [21] als auch ein unabhängiger Bericht von JA Sorensen bei Bellcomm [22] zu dem Schluss, dass „die Schwingung des Drosselbefehls P66 offensichtlich auf der Tatsache beruht, dass der tatsächliche Wert Die Zeitkonstante des Landemotors ist geringer als erwartet “(Sorensen). Klump überprüfte die Daten erneut. Die Parameter des Landungsmotors wurden verbessert, die entsprechenden Änderungen wurden jedoch nicht an der Dokumentation vorgenommen. Die tatsächliche Verzögerung für den Landemotor betrug etwa 0,075 s. Es stellte sich heraus, dass wir es sogar überkompensiert haben. Infolgedessen stand der Gashebel kurz vor der Stabilität.
Clampps Analyse ergab ein noch auffälligeres Ergebnis. Er zeigte, dass das Gas instabil wäre, wenn die Apollo 11-Software 0,3 s kompensieren würde. Die Gasvibrationen würden größer werden, anstatt sich zu beruhigen. Nach dem Drosseln in P63 oder möglicherweise in P66, wenn die IMU eingeschaltet war, pendelte der DPS-Motor schnell zwischen minimalem und maximalem Schub. Zweifellos würde die Flugsteuerung das Drosselverhalten logischerweise mit den Alarmen 1202 in Verbindung bringen, die völlig unabhängige Ursachen hatten.
Ein Unfall wäre unvermeidlich. Meiner bescheidenen Meinung nach hätte sich Apollo 11 niemals hingesetzt, wenn der Autor den „richtigen“ Wert im Gassteuerungsprogramm codiert hätte. Ich lade jemanden ein, der kein persönliches Interesse hat und sich mit Mathematik auskennt, diese Theorie zu überprüfen.
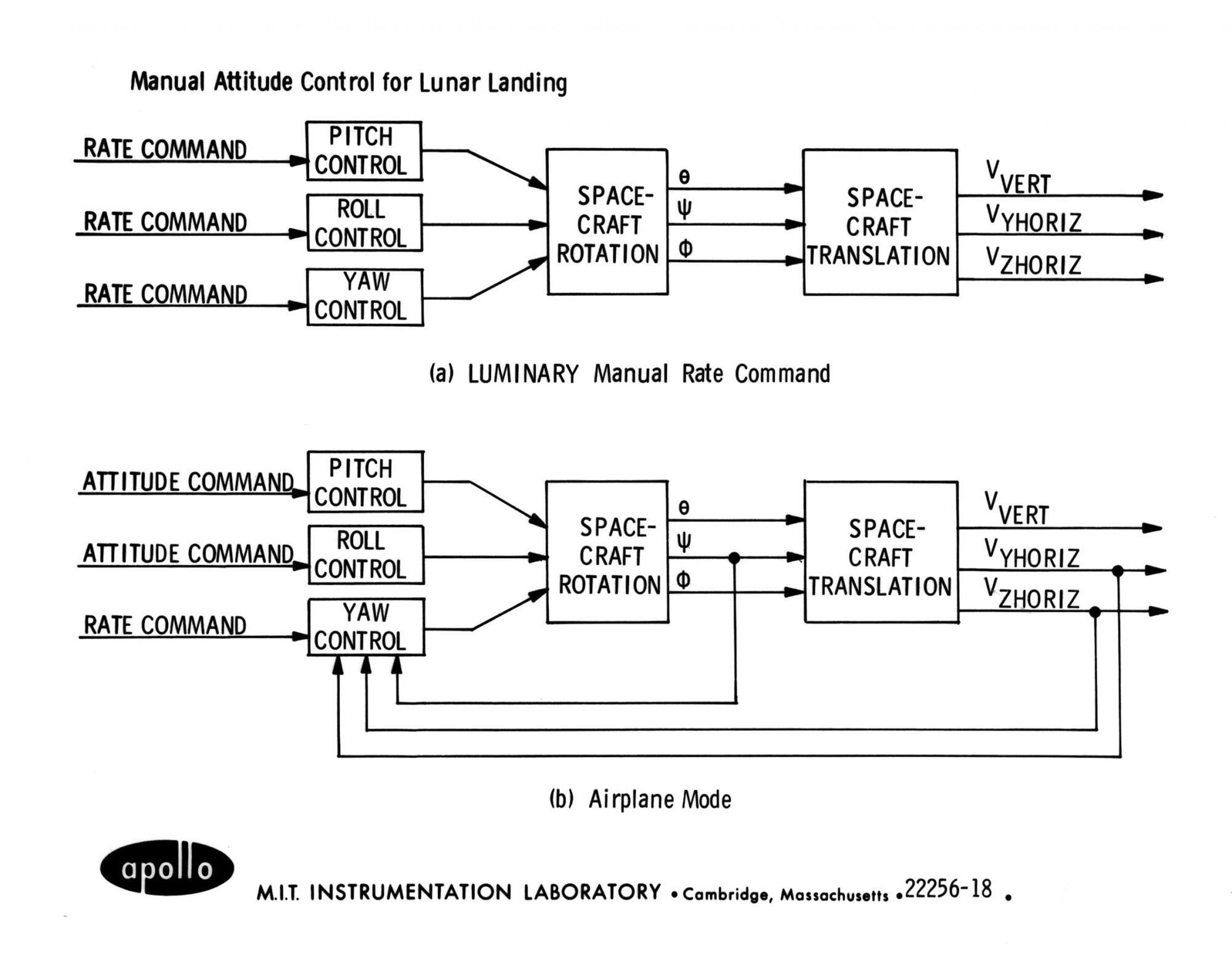
Manuelle Mondlandung
* * *
Wir haben die Drosselklappenverzögerung angepasst und die Simulation hat gezeigt, dass die Instabilität der Drosselklappenposition verschwunden ist. Es wurden Änderungen an der Apollo 13-Missionssoftware vorgenommen, aber diese Mission landete nicht auf dem Mond.
Es ist merkwürdig, dass eine Änderung in der Apollo 13-Software vorgenommen wurde, bevor das Gasproblem bekannt wurde. Dies könnte zu einem Fallback führen, wenn die Automatisierung der Gassteuerung nicht funktionieren würde. Es wurde ein neues „Substantiv 92“ definiert, mit dem die Besatzung den vom Steuerungssystem erzeugten Drosselklappenpegel anzeigen kann. Die Logik, die die automatische Steuerung stoppen würde, wenn der Gashebel in den MANUELLEN Modus wechseln würde, wurde gelöscht. Diese Änderungen [23] ermöglichen es dem Astronauten, das Gas während der Phasen P63 und P64 zu steuern, während das Steuerungssystem weiterhin die Bewegung des Schiffes steuert. Ich weiß nicht, ob diese komplexen Verfahren jemals angewendet wurden.
Überlastungsalarme von Führungskräften wurden mehrfach angesprochen.
Der Näherungsradarschalter befand sich während des Starts in der LGC-Position. In nachfolgenden Missionen wurde die Checkliste geändert. Wir haben dem LUMINARY eine Logik hinzugefügt, um den Näherungsradar-Betriebsmodus zu überprüfen. Wenn dies nicht LGC war, wurden die Näherungsradarzähler auf Null zurückgesetzt.
Alan Clump studierte Executive aus einer anderen Perspektive. Er stellte fest, dass das TLOSS eines Computers, wenn es regelmäßig auftritt oder sich die Aktivitätsstufe des Computers bei Vorhandensein von TLOSS ändert und die SERVICER-Aufgabe nicht abgeschlossen wurde und zum Zeitpunkt der Ausführung der Positionsberechnungsbefehle zum Senden an den Autopiloten unterbrochen wurde, nicht durch einen Neustart der Software gelöscht wurde später wiederhergestellt werden - unter diesen Bedingungen bestand die Möglichkeit einer falschen Positionsberechnung für den Autopiloten. Für den Flug von Apollo 13 entwickelte Klump eine Lösung, bei der alle SERVICER-Arbeiten zurückgesetzt wurden, um bei Bedarf aufzuholen.
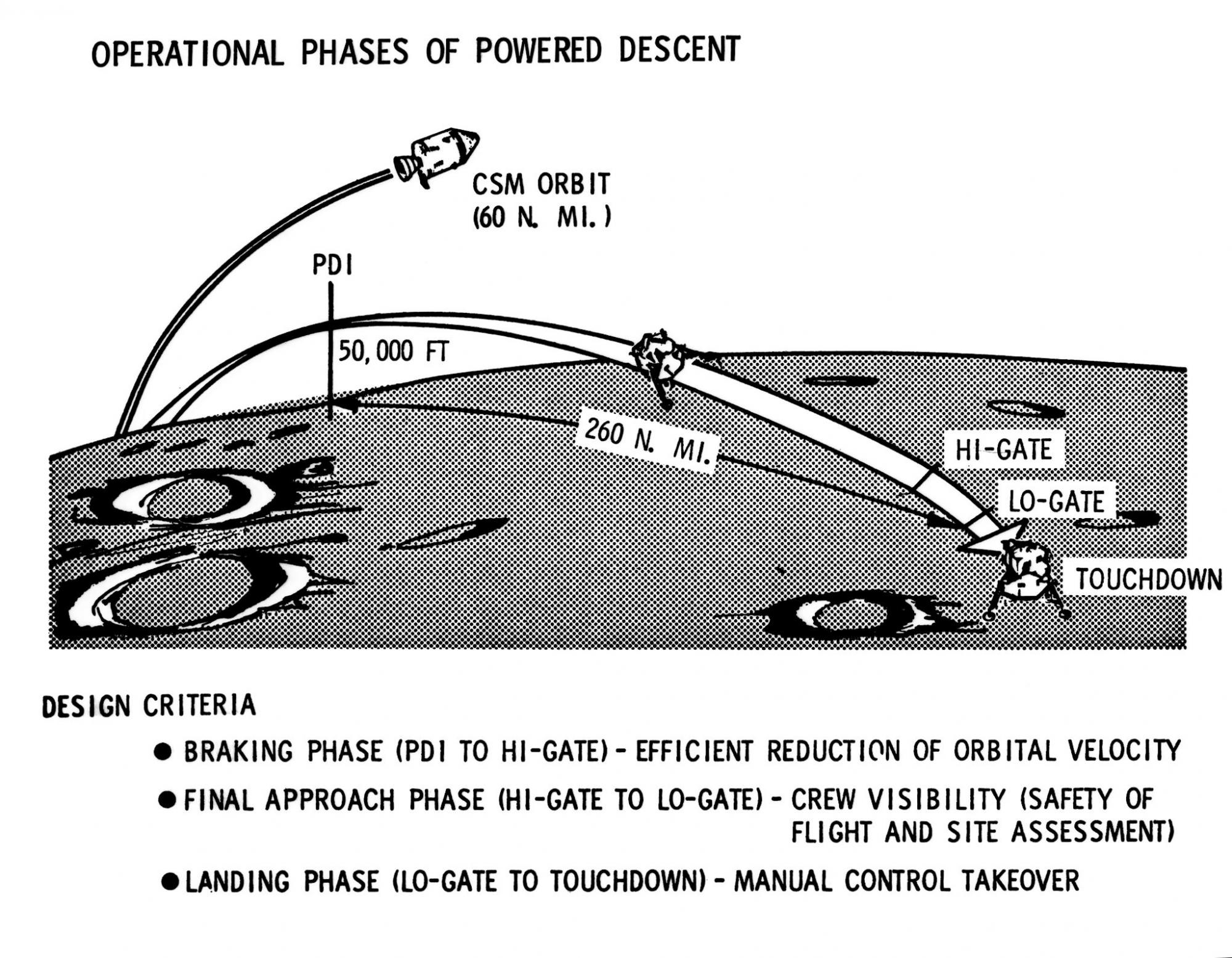 Mondlandephasen
MondlandephasenAber in Zukunft hat uns keine dieser Änderungen von den Einschränkungen einer festen Zwei-Sekunden-Periode des Orientierungssystems befreit. Um auf schwierigem Gelände zu landen, musste dem Radarprogramm ein Geländemodell hinzugefügt werden. Änderungen am Orientierungssystem wurden für später vorgenommen. Wir hatten nicht für alles Zeit.
Wir haben ein Konzept entwickelt, das wir als „SERVICER-Variable“ bezeichnet haben und in dem der Zeitraum des Orientierungsprogramms bei Bedarf verlängert werden kann. Die Befürchtung, dass das Zwei-Sekunden-Intervall in die Software integriert ist, erwies sich als unbegründet. Es war nur erforderlich, die Betriebsdauer des Orientierungssystems zu messen und diesen Wert anstelle des Zwei-Sekunden-Werts zu verwenden, der nur in wenigen Formeln verwendet wird. Wir haben die Arbeitsversion von SERVICER in der Offline-Version von LUMINARY implementiert und ihre sehr hohe Beständigkeit gegen TLOSS demonstriert [25].
Die Befreiung von der Zwei-Sekunden-Grenze ermöglichte die Berücksichtigung anderer Ideen. Der Astronaut John Young schlug eine Verbesserung vor, die wir P66 LPD nannten. Zu diesem Zeitpunkt war P66 jedoch ein viel flexibleres Programm als in Armstrongs Apollo 11-Flug. Eine der neuen Funktionen war, dass das Orientierungssystem bei einer Umschaltung des ATT HOLD-Modus auf AUTO zu einer horizontalen Geschwindigkeit von Null führen würde. Young hatte die Idee, dass die LGC den LPD-Winkel (wie in der sichtbaren Phase) anzeigt, der dem Kommandanten den Punkt anzeigt, über dem das Mondmodul fliegt, wenn in diesem Moment der Autopilot auf AUTO geschaltet wird [26].
Um die Genauigkeit bei der Ausführung dieser Funktion zu gewährleisten, musste die Software sofort reagieren, wenn der Astronaut auf AUTO umschaltete, schneller als zwei Sekunden und sogar schneller als die zweite zulässige Zeitspanne, mit der einige Teile von P66 arbeiteten. Wir haben eine Version entwickelt, in der die Aufgabe jede Viertelsekunde gestartet wurde, die Änderung des Autopilot-Modus überprüft, Orientierungs- und Gasbefehle gesendet und so schnell und genau wie möglich auf die Eingabe vom ROD-Schalter reagiert hat. In einer bemannten Simulation, die auf dem Mondmodul-Simulator (LM Mission Simulator, LMS) auf Cape Canaveral ausgeführt wird und dessen fabelhafte Geländemodelle in den Fenstern sichtbar sind, haben wir gezeigt, dass dieses System eine sehr genaue Landung ermöglicht.
Weder die "SERVICER-Variable" noch die P66-LPD wurden jemals gepatcht. Die NASA hat entschieden, dass Apollo 17 der letzte sein wird. Bei so wenigen verbleibenden Missionen traf der Regierungsrat eine konservative Entscheidung - es sollte keine wesentlichen Änderungen an der Landungssoftware geben. Durch die Synchronisierung der vom Landeradar empfangenen Daten mit dem Ablesen der Beschleunigungsmesser konnte Robert Covelli genügend Zeit frei machen, um das Geländemodell für Apollos 15, 16 und 17 dort anzupassen.
 Inertial Module (IMU) am MIT Lab
Inertial Module (IMU) am MIT LabApollo 14 brachte dem Autor kurzfristigen Ruhm. Der Dashboard-Interrupt-Schalter sendete ein periodisches Signal, das Alan Shepard und Ed Mitchell daran hinderte, sich zu setzen. Ich habe Code geschrieben, der diese Fälle überwacht. Diese „Krücke“ änderte einfach mehrere Register, wobei der erste den Missionsunterbrechungsmonitor dazu verleitete, zu glauben, dass die Unterbrechung bereits aufgetreten war, und sich dann selbst löschte, damit die Landung ohne Konsequenzen fortgesetzt werden konnte. Der Patch wurde über Funk ausgestrahlt und von den Astronauten fehlerfrei in Aktion gesetzt. Dieses Verfahren umfasste 61 Tastenanschläge auf DSKY. Der vielleicht interessanteste Teil des Apollo 14-Vorfalls war die Anzahl der verschiedenen Versionen dieser Geschichte. Aber Apollo 14 ist eine andere Geschichte.
Im Dezember 1972 ging ich nach Cape Canaveral, um das Apollo 17-Schiff zu starten. Dieser Raumflug war fantastisch. Der Schriftsteller Tom Wolfe schrieb zusammen mit der Fotografin Annie Leibovitz eine vierteilige Kurzgeschichte für das Rolling Stone-Magazin, das der Vorläufer von „The Right Stuff“ war [27]. Es war der einzige Start von Apollo über Nacht. Floridas nebliger Himmel brennt von Horizont zu Horizont orange, als der riesige Saturn V auf einer Viertelmeilen Flammensäule aufsteigt, die am Ende wie eine Lötlampe schwankte.
Ich habe mehrere Tage damit verbracht, einige der LMS-Funktionen zu testen, die wir als "löschbare Speicherprogrammierung" bezeichnet haben. Dies waren Patches, die unbenutzte VACs verwenden und einige Fehler beheben sollten, das Erbe des Vorfalls mit Apollo 14. Dann flog ich nach Cambridge, um die Landung zu beobachten.
Danach hörte ich gerne Gene Cernan und Jack Schmitt zu, einem Geologen, der trainierte und den Mond in einem Mondrover erkundete, nachdem er mehr als 3 Meilen außer Sichtweite des Raumfahrzeugs gereist war. Und dies war das letzte Mal, dass jemand auf dem Mond ging.
Abb. 13: Einige der Teilnehmer.
Tolles Foto, erste Reihe: Vince Megna, "Doc" Charles Stark Draper, Autor, Dave Moore, Tony Cook; hintere Reihe: Phil Felleman, Larry Berman, Allan Klumpp, Bob Werner, Robert Lones, Sam Drake. Kleines Foto, erste Reihe: Larry Berman, Peter Volante, der Autor; hintere Reihe: Sam Drake, Bruce McCoy. An den Veranstaltungen nahmen auch Steve Copps, Romilly Gilbert, Ken Goodwin und Russ Larson teil.
Referenzen[1] Klumpp, AR; "Apollo Lunar Descent Guidance"; MIT Charles Stark Draper Laboratory, R-695; Juni 1971.
[2] Cherry, GW; "E-Guidance - Ein allgemeines explizites, optimierendes Guidance-Gesetz für raketengetriebene Raumfahrzeuge"; MIT Instrumentation Laboratory, R-456; August 1964.
[3] Brooks, Courtney G. et al.; "Streitwagen für Apollo, eine Geschichte bemannter Mondraumschiffe"; NASA 1979.
[4] Silber, George; private Kommunikation; 2004.
[5] Hall, Eldon C.; Reise zum Mond: Die Geschichte des Apollo Guidance Computer; AIAA, 1996.
[6] Blair-Smith, Hugh; "Block II Anweisungen"; MIT Instrumentation Laboratory, AGC4 Memo 9; 1. Juli 1966.
[7] Muntz, Charles A.; "Benutzerhandbuch zum Block II AGC / LGC-Interpreter"; MIT Instrumentation Laboratory, R-489; April 1965.
[8] Apollo 11-Downlink-Daten.
[9] Nachbesprechung der technischen Besatzung von Apollo 11; NASA, 31. Juli 1969 [Nachbesprechung].
[10] Apollo 11 Technische Luft-Boden-Sprachübertragung; NASA, Juli 1969 [Stimme].
[11] Stimme.
[12] Nachbesprechung.
[13] Apollo 11-Missionsbericht; NASA, SP-238.
[14] Nachbesprechung.
[15] Nachbesprechung.
[16] Stimme.
[17] Klumpp, A.; Memo ohne Titel zum Echtzeitdiagramm zur Überwachung der Computeraktivität; MIT Charles Stark Draper Laboratory, 9. April 1970.
[18] Klumpp, A. und Kalan, G.; „Beseitigung von Rauschen und Verbesserung der Stabilität und des dynamischen Ansprechverhaltens des Apollo LM-Abstiegsratenprogramms“; MIT Charles Stark Draper Laboratory, E-2543, Oktober 1970 [Lärm].
[19] Lärm.
[20] Klumpp, Allan; private Kommunikation; 1985.
[21] Lärm.
[22] Sorensen, JA; "Lineare Stabilitätsanalyse von LM-Abstiegsleitungsgleichungen"; Bellcomm Inc., B70 06074, 25. Juni 1970.
[23] Tindall, HW und Garman, Jack; "Entfernen Sie die Überprüfung von Auto Throttle Discrete"; LUMINARY 1C Program Change Request (PCR) 285, 30. September 1969.
[24] Eyles, D.; "Verhindern, dass RR-ECDUs LGC-Speicherzyklen stehlen"; LUMINARY 1B PCR 848, 23. Juli 1969.
[25] Eyles, Don; "Beschreibung des variablen Servicers"; MIT Charles Stark Draper Laboratory, Luminary Memo 139, 3. März 1970.
[26] Eyles, Don; "Apollo LM-Anleitung und Pilotenunterstützung in der letzten Phase des Mondabstiegs"; MIT Charles Stark Draper Laboratory, E-2581; Mai 1971.
[27] Wolfe, Tom; Reue nach der Umlaufbahn Rolling Stone; 4. Januar 1973.