
Grüße Habroyuzery. Mein Name ist Eugene und in einer Reihe von Artikeln möchte ich über den Prozess der Entwicklung und Erprobung eines Kollisionsvermeidungssystems für Industrieanlagen und Menschen sprechen, die Seite an Seite damit arbeiten.
Aber zuerst eine kleine Geschichte. Eine nördliche Stadt ist unsere immense. Die Stadt hat eine große Mine, die im Wesentlichen der Hauptarbeitsplatz für die Bewohner der Stadt ist. Freitag ist der Arbeitstag bereits am Nachmittag vergangen. Bergleute am Horizont von 720 Metern feierten den Geburtstag eines Kollegen mit einem Alkoholgetränk, das heimlich in die Baustelle geschmuggelt wurde. Und dann ging ein betrunkener Bergmann zur Belüftung, bevor er an die Oberfläche ging, aber dabei wurde er ein wenig müde und döste auf den Schienen der U-Bahn ein, um das Erz zu transportieren. Er wurde von einer elektrischen Lokomotive geweckt, deren Fahrer im Dunkeln den unglücklichen Bergmann nicht bemerkte, der von der Reling döste. Infolge einer Kollision einer elektrischen Lokomotive bei einem Bergmann verlor er sein Handgelenk. Eine schreckliche Geschichte und viele ähnliche Geschichten aus anderen Teilen Russlands bringen jedes Mal andere Führer zum Nachdenken. Und was kann getan werden, um solche Geschichten weniger oder nie mehr zu machen? Hier beginnt die Anfrage nach einem System, das das Problem löst, dass Geräte nicht auf Menschen treffen.
Der Hintergrund des Problems, das uns veranlasste, 2016 mit der Entwicklung eines solchen Systems zu beginnen, ist folgender. Bergbau ist eine der gefährlichsten Berufe der Welt. Und in unserem Land ist dies nach der Öl- und Gasförderung einer der Schlüsselsektoren der Wirtschaft. Es gibt zwei Möglichkeiten, Mineralien auf der ganzen Welt zu gewinnen: offen (Oberfläche) und unterirdisch.
Als Entwickler von Positionierungssystemen beschäftigen wir uns seit langem mit der Positionierung von Bergleuten in Minen, und heutzutage ist in fast allen Minen das Problem der Positionierung bis zu dem einen oder anderen Grad gelöst. Leider kommt es weiterhin zu Vorfällen im Zusammenhang mit Kollisionen von Bergbaumaschinen und dem Aufprall von Fahrzeugen auf das Personal. Im Westen wurde dieses Problem bereits 2006-2010 durch die Entwicklung und Implementierung von Kollisionsvermeidungssystemen angegangen. Zunächst wurden solche Systeme in Steinbrüchen eingeführt, da dort ähnliche Vorfälle häufiger auftraten. Seit
März 2019 ist die Installation von Kollisionsvermeidungssystemen in Russland obligatorisch, jedoch nicht in Steinbrüchen, sondern in Minen. Und hier kommen wir eigentlich zu TK und der Anfrage nach solchen Systemen.
Alle Bergbauunternehmen in Russland müssen die Arbeitsschutzbestimmungen einhalten. Rostekhnadzor (Bundesdienst für ökologische, technologische und atomare Überwachung) überwacht die Einhaltung dieser Regeln, und wir haben bei der Entwicklung des Systems in erster Linie die Anforderungen dieses Dienstes berücksichtigt. Da die Anforderungen an Kollisionsvermeidungssysteme in unserem Land bei der Erstellung von TK für Entwicklungs-, Testszenarien und Akzeptanzkriterien bislang weit
gefasst sind, stützten wir uns auf ein internationales Dokument, das von
EMESRT (Earth Moving Equipment Safety Round Table) entwickelt wurde . Dies ist eine Organisation, die Bergbauunternehmen, Regierungsbehörden, Hersteller von Bergbaumaschinen, Dienstleistungs- und Maschinenbauunternehmen auf der ganzen Welt zusammenbringt.
Diese Organisation hat eine Klassifizierung von Management- und Sicherheitssystemen für den Bergbau entwickelt:
- Stufe 7 - Bedienerbewusstsein
Technologien, die Informationen bereitstellen, um die Fähigkeit des Bedieners zu verbessern, potenzielle Gefahren in der Nähe von Geräten zu beobachten und zu verstehen.
- Stufe 8 - Beratungskontrolle
Technologien, die Alarme und / oder Anweisungen bereitstellen, um die Fähigkeit des Bedieners zu verbessern, potenzielle unsichere Maßnahmen und erforderliche Korrekturmaßnahmen vorherzusagen. - Stufe 9 - Interventionskontrolle
Technologien, die automatisch eingreifen und irgendeine Form der Gerätekontrolle durchführen, um die Folgen einer gefährlichen Situation zu verhindern oder zu verringern.
Die Grundlage für die Entwicklung des Systems und des Programms für nachfolgende Tests und Testszenarien wurde als Dokument
Fahrzeuginteraktionssysteme verwendet , in dem die wichtigsten Szenarien und Situationen dargelegt wurden, die während des Betriebs von Geräten und Personen im Bergbau auftreten, sowie mögliche Vorfälle mit ihnen.
Bei der Entwicklung eines Systems für Bergbaumaschinen sollten die folgenden gefährlichen Situationen beseitigt oder der durch sie verursachte Schaden minimiert werden (Minimierung der Folgen eines Vorfalls):
- Verletzungen durch Workstation-Design und externe Strukturen
- Verletzungen oder Krankenhausaufenthalte infolge körperlicher und / oder geistiger Müdigkeit
- Schäden durch eingeschränkte Sicht (einschließlich verzerrter oder beeinträchtigter Sicht) oder Verletzung des Gefahrenbewusstseins unter verschiedenen Betriebsbedingungen
- Schäden durch eingeschränkte oder schwierige Sicht durch den Bediener der Umgebung und den Betrieb des Werkzeugs
- Kollisionsschaden durch Bewegung von Personen und Fahrzeugen in der blinden Zone des Bedieners
- Schaden durch Stabilitätsverlust der Maschine während des Betriebs, der Bewegung, der Artikulation
- Schäden durch unsachgemäße Verwendung von Gerätesteuerungen, unsachgemäße / ungenaue Kalibrierung oder ineffiziente Wartung aufgrund schlecht gestalteter Bedienelemente und Anzeigen
- Schäden durch Fehlinterpretation von Informationen auf Displays oder Etiketten
- Schaden, einschließlich geistiger Überlastung, durch verpasste Warnungen und Alarme, die ignoriert oder nicht gehört werden
Sie enthalten Anforderungen sowohl an das System selbst als auch an den Gerätetyp, die Visualisierung von Benachrichtigungen und Benachrichtigungsmethoden.
Sie müssen zugeben, dass für Kollisionsvermeidungssysteme wesentlich mehr Anforderungen gelten als in der russischen Ausgabe der Arbeitsschutzvorschriften für Bergbauunternehmen (
Verordnung vom 11. Dezember 2013 Nr. 599 über die Genehmigung von Bundesnormen und -vorschriften im Bereich des Arbeitsschutzes „Sicherheitsvorschriften für Bergbau und Feststoffverarbeitung) Mineralien " ), wo nur ein Punkt geschrieben steht:
Punkt: 325 Transportfahrzeuge, die in Bergbaubergwerken eingesetzt werden, müssen mit Kollisionsvermeidungssystemen ausgestattet sein. Das Kollisionsvermeidungssystem sollte den Fahrer rechtzeitig über die Anwesenheit von Personen und Fahrzeugen im Radius der Fahrzeugbahn informieren.
Es ist die viel umfangreichere Liste der von EMESRT beschriebenen anfänglichen Anforderungen an das Kollisionsvermeidungssystem und die Berücksichtigung dieser Anforderungen bei der Entwicklung des Produkts, die alle bestehenden und neuen Anforderungen erfüllen, die in Zukunft zu den relevanten Dokumenten und Vorschriften für russische Bergbauunternehmen hinzugefügt werden können.
So kamen wir zu den Schlüsselszenarien der Arbeit von Geräten und Personen, in denen ein Kollisionsvermeidungssystem die Gefahr ermitteln und alle Teilnehmer in einer solchen Situation davor warnen sollte.
Liste der Bergbauszenarien:- P1-Man befindet sich direkt neben der Maschine
- P3-Man wird bei der Arbeit mit Maschinen und Geräten überwacht
- P4-Man sitzt in oder aus der Kabine
- L1-Frontalansatz mit stehender Maschine
- L2-Annäherung an die Maschine beim Rückwärtsfahren mit einer stehenden Maschine
- L3-Annäherung von 2 Autos bei jeder Rückwärtsfahrt
- L4-Annäherung von 2 Autos beim Fahren nacheinander
- L5-Abfahrt von zwei Autos, die sich aufeinander zu bewegen
- L6-Zwei Autos bewegen sich rückwärts, wobei ein Auto das andere überholt
- L7-Annäherung von 2 fahrenden Autos und Überholen eines von ihnen
- L8 Zero Visibility Approach
- C1-Annäherung von 2 Autos aneinander, wenn sie in einer Kurve der Straße mit unzureichender Sicht fahren
- C3-Annäherung an ein Fahrzeug, das sich vorwärts bewegt, wobei sich ein Fahrzeug unter Biegebedingungen mit unzureichender Sicht rückwärts bewegt
- T1-Annäherung von 2 Autos, die sich an der Kreuzung in die gleiche Richtung bewegen
- T2-Annäherung von 2 Autos aneinander mit der Absicht, an der Kreuzung eines der Autos abzubiegen
- T3-Annäherung von 2 Autos, die sich an einer T-Kreuzung in einem Winkel von 90 Grad in die gleiche Richtung bewegen
- T4-Annäherung von 2 Autos, die sich an der Kreuzung von 2 technologischen Straßen in die gleiche Richtung bewegen
- R1-Maschine mit rotierendem Arbeitswerkzeug arbeitet neben einer anderen Maschine
- R2-Machine lädt Materialien auf eine andere Maschine nach
- Die O1-Maschine nähert sich einer festen Struktur, Wand oder stationären Ausrüstung
- V1-Magin betritt einen Sperrbereich, in dem der Verkehr verboten ist
- V4-Maschine bewegt sich ohne Bedienersteuerung
- V6-Machine bewegt sich durch das Gebiet, in dem sich eine große Anzahl anderer Autos und Personen befindet, beispielsweise eine Werkstatt
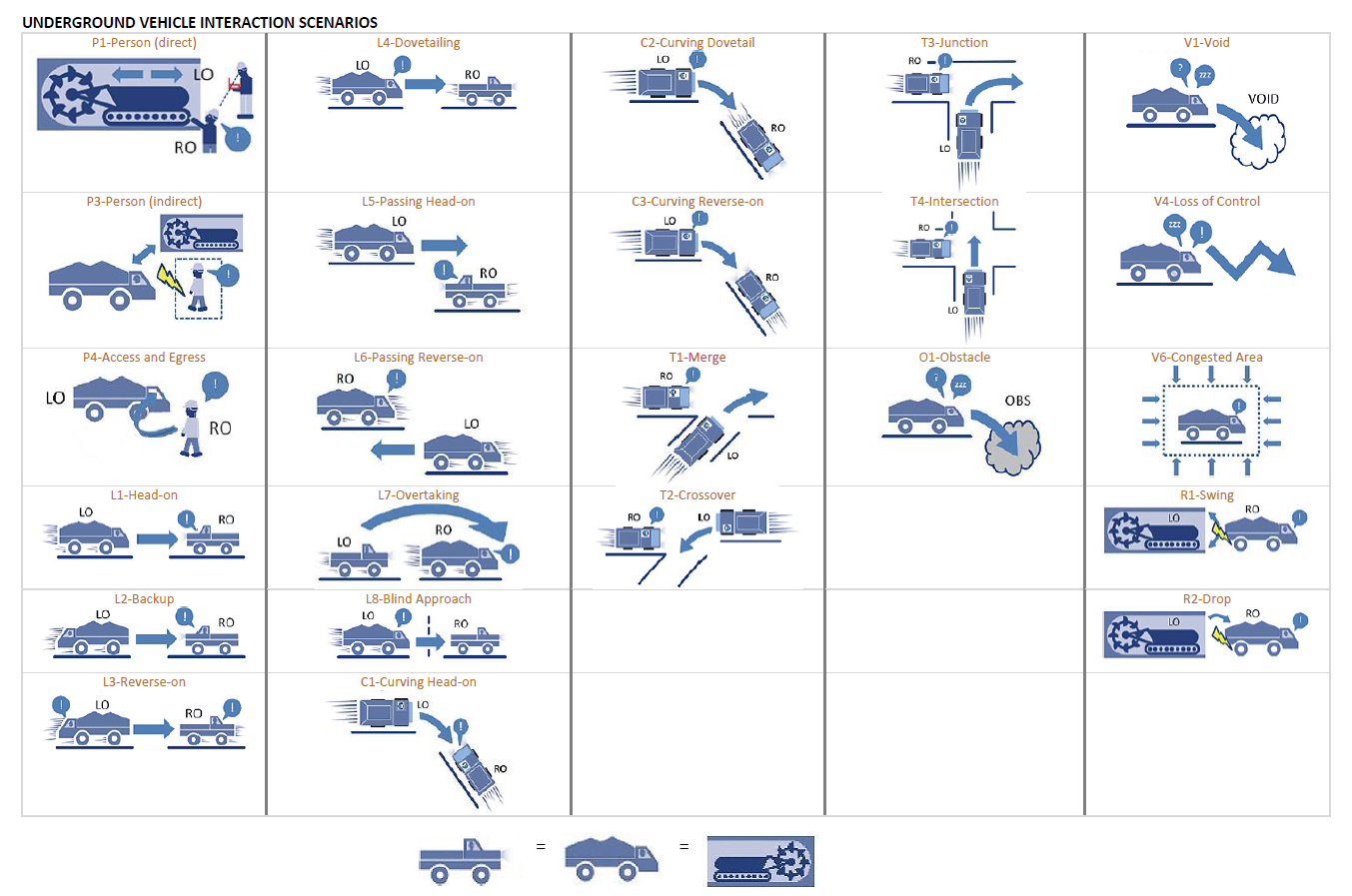
Insgesamt gibt es 24 Szenarien, die 99% aller typischen Aufgaben im Untertagebau abdecken, bei denen selbstfahrende Ausrüstung, Transportmittel und Personen anwesend sein können.
Als nächstes werde ich Ihnen erzählen, wie wir die Technologien für die Entwicklung des Produkts ausgewählt haben, was wir bei der Erstellung durchlaufen mussten und was am Ausgang passiert ist und wie jedes der oben beschriebenen Szenarien getestet wurde.
Technologien und Lösungen zur Schaffung eines Kollisionsvermeidungssystems
Seit 2016 entwickeln wir solche Kollisionsvermeidungssysteme, über die Sie im Artikel über Habré
hier lesen können.
2016 sah es ungefähr so aus In dieser Zeit haben wir die Technologie von der damals veralteten
Nanoloc- Technologie auf die vielversprechendere
UWB-Technologie umgestellt . Wir haben
hier und
hier mehr über die UWB-Technologie auf Habré geschrieben.
Was ist der Vorteil der UWB (UWB) -Technologie zur Positionierung von Objekten?- Hohe Positioniergenauigkeit: bis zu 10 cm.
- Beständigkeit gegen Reflexionen von Funksignalen bei direkter Sicht.
Bis 2018 wurde auf Basis der UWB-Technologie ein Kollisionsvermeidungssystem entwickelt, das mehrere Entwicklungsstufen durchlief.
Es sah aus wie der erste Prototyp einer AntenneIn den ersten Entwicklungsphasen wurde die Antennenplatine in eine Taschenlampe für spezielle Geräte eingebaut. Die Blitzfrequenz der Taschenlampe bestimmt, in welcher Zone sich das persönliche Tag befindet.

"alt =" image "/>
Eine der Phasen des Testens eines neuen AntennengehäusesDas Antennengehäuse ist aus einem hochbelastbaren grünen Polymer geformt. Die Farbe wurde aufgrund der Tatsache ausgewählt, dass sie nicht in der Umgebung gefunden werden sollte, in der das System verwendet wird.

Jetzt besteht das System aus folgenden Komponenten:
 Tag (TAG)
Tag (TAG) - ein Chip mit Unterstützung für die UWB-Technologie, der in die Taschenlampe des Bergmanns oder ein darauf basierendes separates Gerät eingebaut ist.
 Antenne (VBU)
Antenne (VBU) - ist auf der Haut des Fahrzeugs installiert. Es enthält auch einen UWB-Chip, der die Entfernung zu einem anderen UWB-Chip durch ToF (Time of Flight) bestimmt.
 Die Steuereinheit (VCU)
Die Steuereinheit (VCU) ist ein Mikrocomputer, der die von den Antennen empfangenen Messungen verarbeitet und mithilfe eines mathematischen Algorithmus die Position des Tags relativ zum Fahrzeug ermittelt und Daten zur Visualisierung an das Fahrerdisplay sendet.
 Display (VOD)
Display (VOD) - bietet eine visuelle Darstellung von Informationen über die Position von Tags relativ zum Fahrzeug.
Im Zentrum der UWB-Positioniertechnologie steht der Chip des irischen Unternehmens Decawave. Die Chips haben eine eigene Antenne, mit der sie die Signallaufzeit untereinander messen können. Da sich in der VBU derselbe UWB-Chip befindet wie in den Tags, erkennen sie sich gegenseitig bei Vorhandensein von Funksichtbarkeit und messen auch untereinander. Mit diesem Prinzip können Sie die Flugzeit des Signals wie zwischen den Antennen von Fahrzeugen, also zwischen der Antenne und dem Tag, bestimmen.
Von hier aus erhalten wir zwei Kontrollbereiche:
- Transportfahrzeug (Fahrzeug zu Fahrzeug oder V2V)
- Transportperson (Fahrzeug zu Personal, V2P)
Das Prinzip des Systems
Das System basiert auf dem Prinzip, um das Fahrzeug herum 3 Kontrollzonen für gefährliche Nähe zu schaffen. Darüber hinaus können die Zonen eine beliebige Form haben und sowohl strukturelle Merkmale als auch Fahrzeugbewegungsparameter berücksichtigen.
AufmerksamkeitszoneWarnt Arbeiter vor dem Vorhandensein von Fahrzeugen, Ausrüstung usw. in kurzer Entfernung.
Das System signalisiert eine mögliche gefährliche Annäherung und ermöglicht es dem Fahrer und dem Bergmann, auf die Tatsache aufmerksam zu machen, dass sie sich einem anderen Objekt nähern.
Antennen (VBUs) senden ein Signal in den Raum um das UWB-Fahrzeug, um nach anderen Antennen (VBUs) oder persönlichen Tags (TAGs) in der Funksichtbarkeitszone zu suchen.
Wenn andere Antennen (VBU) oder Personal Tag (TAG) in der Zone „Attention“ erkannt werden, wird der Abstand von der Antenne (VBU) zum Objekt gemessen.
Daten zu Entfernungsmessungen werden an die Steuereinheit (VCU) übertragen, wo die Position der erfassten Objekte in Entfernung, Richtung und Fläche berechnet wird.
Das Berechnungsergebnis wird auf dem Treiberdisplay (VOD) angezeigt.
Aufmerksamkeitsbereich auf dem Display GefahrenzoneEs behebt gefährliche Annäherungen und zieht die Aufmerksamkeit der Arbeiter auf sich, es kann Ausrüstung und Transport verlangsamen.
Das System meldet einen möglichen Unfall und ermöglicht es Ihnen, den Fahrer und den Bergmann auf die Tatsache aufmerksam zu machen, dass Sie sich einem anderen Objekt nähern.
Der Fahrer sieht auf dem Display (VOD), in welcher Zone sich das erkannte Objekt befindet, und wenn es sich dem Fahrzeug nähert, bewegt sich das Objekt von der Zone „Aufmerksamkeit“ in die Zone „Gefahr“ auf dem Display (VOD). Gleichzeitig wird in der Kabine eine Licht- und Tonwarnung (VOD) angezeigt, wenn das Objekt die Gefahrenzone betritt. Blinkende Leuchtfeuer und eine akustische Warnung werden sowohl in der Fahrerkabine als auch an der Außenseite des Fahrzeugs aktiviert. Gleichzeitig wird eine akustische und leichte Warnung auf dem persönlichen Etikett (TAG) des Mitarbeiters oder in der Kabine eines anderen Fahrzeugs aktiviert, das mit dem Produkt RealTrac Collision Avoidance ausgestattet ist.
Gefahrenzone auf dem Display AbsturzzoneEs wird ein Alarm ausgelöst, wenn ein anderes mit einem System ausgestattetes Objekt die Alarmzone betritt.
Wenn ein Objekt aus der Gefahrenzone in die Unfallzone eintritt, sind alle Mittel zur Alarmierung des Fahrers des Fahrzeugs enthalten. Auf dem Fahrerdisplay (VOD) leuchtet ein rotes Warnsignal auf und es ertönt ein ständiger akustischer Alarm. Das persönliche Tag (TAG) des Bergmanns enthält auch akustische Warnungen und Vibrationswarnungen, um anzuzeigen, dass sie sich in der Unfallzone befinden.
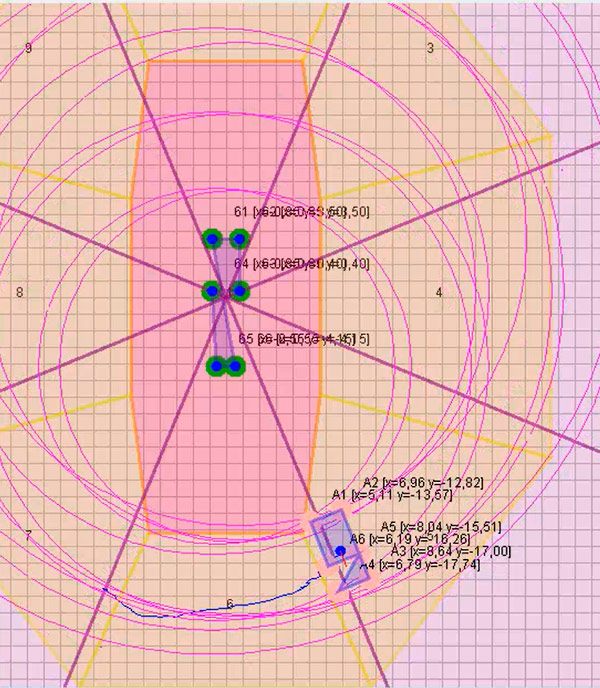
Absturzzone auf dem Display So sehen die Kontrollzonen im Konfigurator des Kollisionsvermeidungssystems aus. Die Installationspunkte der Antennen am Fahrzeug und das an einem anderen Fahrzeug installierte Etikett sind sichtbar. Gitterabstand 1 m.
Dies ist das Prinzip des theoretisch beschriebenen Systems. Wie das alles in der Praxis aussieht, werde ich im zweiten Teil des Artikels in einer Woche erzählen.
Wenn Sie Fragen haben, schreiben Sie in die Kommentare.