Meine Geschichte ist das Eintauchen in das Studium der Robotik und die Schaffung eines Roboters mit einem 3D-Drucker. Fehler, auf die ich gestoßen bin und die ich als Ergebnis erhalten möchte
Hintergrund
Vor ungefähr 10 Jahren, in den ersten Kursen der Universität, als ich etwas über die Existenz von Arduino lernte und lernte, wie man Waren aus China bestellt, bestellte ich mir ein Arduino Mega Starter Kit und lernte wie alle anderen, eine LED zu blinken. Ich habe eine wilde Freude daran, dass ich nicht nur einige Lösungen auf dem Computerbildschirm programmieren und erhalten kann, sondern auch einige Geräte herstellen kann, die mir das Leben erleichtern. Ich begann über IOT nachzudenken, bevor ich von einem solchen Konzept erfuhr, und von Zeit zu Zeit dachte ich daran, solche nützlichen Dinge umzusetzen. Das erste Projekt auf Arduino, das ich für abgeschlossen hielt, war ein Controller für ein Terrarium mit einer Spinne. Bildschirm, mehrere Tasten für Steuerung, Temperatur- und Feuchtigkeitssensor DHT11, Automatisierung der Hintergrundbeleuchtung, Heizung mit einem Inkubatorkabel und alles. Ich hatte bereits Erfahrung in der Arbeit mit Pascal in der Schule, ich mochte Programmieren, aber ich wollte das Leben nicht direkt damit verbinden, es war langweilig für mich und ich habe offensichtlich in der Ingenieurspezialität oder besser gesagt in Information Design Technologies an der NTU „KhPI“ studiert. .
Sie versprachen eine super fortschrittliche Richtung, fortschrittliche Technologien, sagten, wie sehr solche Spezialisten gefragt waren, und lockten mit hellen Bildern von Berechnungen in Ansys, Solidworks und anderen Softwaresystemen. Tatsächlich kann ich jetzt, 6 Jahre nach dem Abschluss, sagen, dass ich kein bisschen bereue, dass ich diese Richtung für mich selbst gewählt habe. Viele Dinge waren natürlich nicht wie bei der Aufnahme beschrieben, aber im 3. Jahr wartete ich trotzdem auf Dinge, die mir gefielen. Ich interessierte mich für das Studium von CAD-Systemen. Bei einer der Olympiaden erhielt ich ein CSWA-Zertifikat von Solidworks, ohne mich zu belasten und mich nicht darauf vorzubereiten. Nach meinem Abschluss erhielt ich jedoch ein Angebot ohne Erfahrung und spezielle Programmierkenntnisse für die Position eines .NET-Entwicklers für Projekte im Zusammenhang mit der Integration von Plugins in Solidworks. Dann 6 Jahre Arbeit mit .NET in mehreren Unternehmen mit unterschiedlichen Richtungen, ein Versuch, remote mit Kryptowährungen zu arbeiten usw. aber das alles hat mir kein Vergnügen bereitet. Von Zeit zu Zeit wurde mir klar, dass ich den Prozess der Automatisierung alltäglicher Prozesse mag, aber mir fiel nichts ein, was ich tun könnte, um nicht nur zu spielen, sondern etwas Reales und Nützliches. Jahre vergingen, die Universität dauerte mehrere Jahre, es gab keine Freizeit, aber irgendwie entschied ich mich am Vorabend der Reparatur, mein Wissen anzuwenden und zu versuchen, etwas wirklich Nützliches zu tun, und begann, ein intelligentes Zuhause zu entwickeln. Er erfrischte ein wenig Wissen über die aktuelle Situation bei Mikrocontrollern in der Welt, erfuhr von der Existenz eines ESP8266 mit Wifi an Bord, einst ein ukrainisches Startup Blynk, das es ermöglicht, bedingt kostenlose Anwendungen für die Steuerung eines Geräts von einem Telefon aus zu erhalten, ohne Erfahrung und Wissen über die Entwicklung von Software für Telefone. Einige Monate später erhielt ich einen Prototyp, der auf einem Steckbrett montiert war, aber er funktionierte stabil. Zum ersten Mal habe ich es zum Testen in Form von Modulen belassen, die in die Verteilerkästen geschraubt sind. Ich möchte schreiben, dass ich nach den Tests unter realen Bedingungen das Board ausgebreitet und alles gut zusammengebaut habe, aber nein, im dritten Jahr hat alles stabil funktioniert, also versuche ich nicht, etwas zu wiederholen. Nach all dem, was mir dabei nützlich war, hatte ich die Möglichkeit, automatisch Strom zu sparen, einschließlich der Hauptverbraucher wie Heizkessel, Geschirrspüler und Waschmaschine bei Nacht. Überwachung der Temperatur in jedem Raum und entsprechende Steuerung der Heizung in jedem Raum. Dort implementierte er auch eine Steuerung für die Fußbodenheizung und Straßenbeleuchtung. Vor 3 Jahren kostete mich diese ganze Lösung ungefähr 50 US-Dollar, da sie nur einen normalen Controller für einen warmen Boden kostet. 3 Jahre Betrieb dieses gesamten Systems haben mir das Vertrauen gegeben, dass Mikrocontroller wirklich für die Entwicklung verwendet werden können und stabil arbeiten können.
Die ersten Versuche, einen Roboter zu bauen
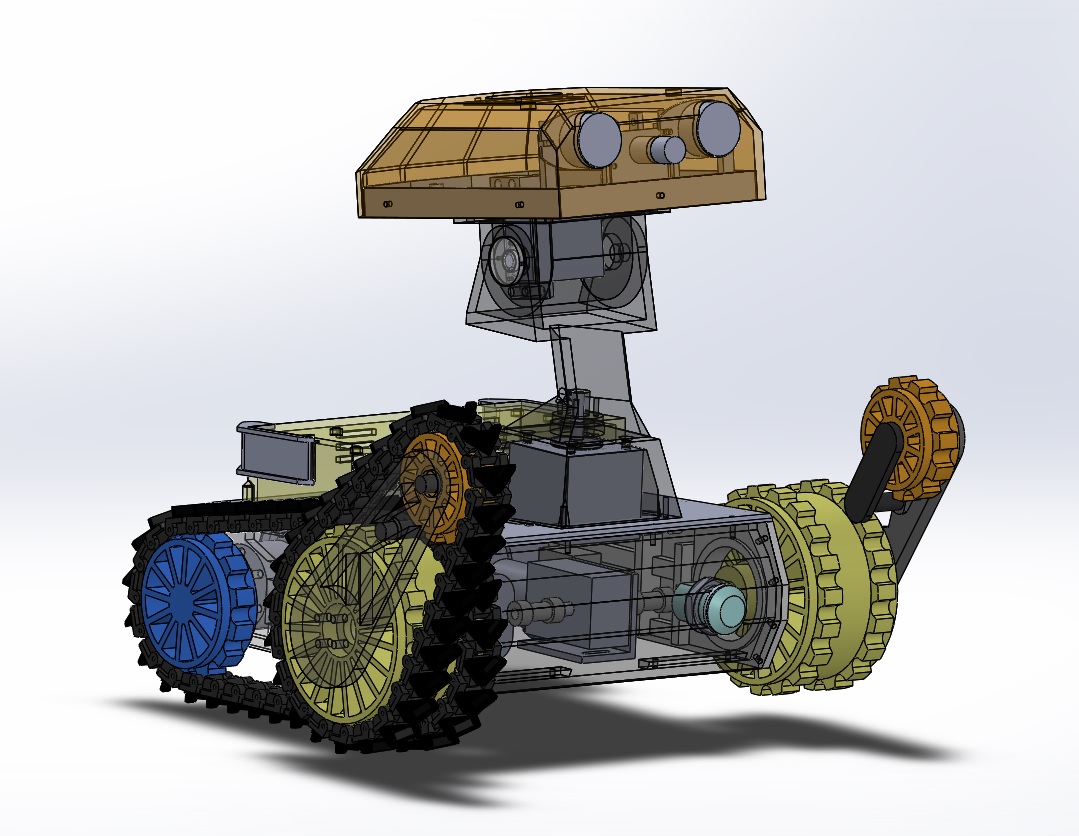
Vor einigen Jahren habe ich mich noch für ein Hobby entschieden und ein Budget zugewiesen, indem ich einen 3D-Drucker gekauft habe. Der Sperrholzklon von Ultimaker wurde sofort von Hand fertiggestellt, die Türen und die Acrylbox zum Drucken von ABS wurden fertiggestellt, und ich begann zu verstehen, dass es mit dem Drucker bereits möglich war, etwas Ernsthafteres, Beweglicheres und Interessanteres für mich zu entwickeln. Ich erinnerte mich an Kindheitssendungen im Fernsehen mit den Kämpfen der Roboter und entschied, warum Sie sich nicht etwas Interessantes machen sollten. Ich ging zum Festival der Robotik und war noch mehr von dieser Idee begeistert. Ich fing an, Roboterprojekte auf thingiverse anzusehen und stellte fest, dass dies alles falsch war, die Designs anderer Leute meistens langweilig und gewöhnlich waren, der Mangel an Quellcode und immer noch „YAGENZHENER“. Ich wollte etwas mit ungewöhnlicher Mechanik und nicht nur einen Radstand. Ich wollte beim Laden von Solidworks einen Roboter implementieren, der einem Roboter ähnelt.
 Der gleiche Roboter, der zu einem der Inspiratoren wurde
Der gleiche Roboter, der zu einem der Inspiratoren wurdeIch habe mir ähnliche Entwürfe angesehen, das Prinzip der Arbeit verstanden und mir überlegt, etwas Ähnliches zu tun. Der erste große Fehler war die Entscheidung, dass alles einfach ist. Ich werde das fertige Design schrittweise modellieren, drucken und überprüfen, ohne eine vollständige Vorstellung davon zu haben, was und wie es angeordnet wird, wie es verwaltet wird, welche Module verwendet werden. Wie sehr ich mich geirrt habe. Anfangs hatte ich verstanden, dass der Roboter "herauswachsen" würde. Ich plante, dass dieser Roboter alle Arten der Objekterkennung mit OpenCV verwendet, eine Art Navigation, automatisches Parken zum Aufladen. Sie werden dort kein ESP verwalten. Ursprünglich bestand die Idee darin, ESP32 für die Arbeit mit Mechanikern und RaspberryPi3 für die Arbeit mit Logik, Kamera, Ton usw. zu verwenden. Eine der notwendigen Bedingungen für mich war das automatische Aufladen, also musste ich herausfinden, wie ich Strom verkaufen kann. Da ich nicht viel Erfahrung mit Elektronik / Elektrotechnik hatte, versuchte ich zunächst, einen Anschein von Powerbank mit der Fähigkeit zu verwenden, im USV-Modus zu arbeiten. Arbeiten Sie mit der Batterie (in meinem Fall 8 Elemente von 18650), wenn keine externe Stromversorgung vorhanden ist, und laden Sie dieselben Elemente auf. Arbeiten Sie mit dem Stromnetz, wenn der Roboter zum Laden parkt. Im Allgemeinen gab es viele Versuche, alles zusammenzusetzen und zum Laufen zu bringen, aber mir wurde klar, dass ich entweder das Material lernen oder Hilfe suchen musste. Aufgrund der ständigen Änderungen aller Module und Platinen passte nicht mehr alles in den Roboterkörper und irgendwann wurde mir klar, dass es Zeit war, alles zu wiederholen.
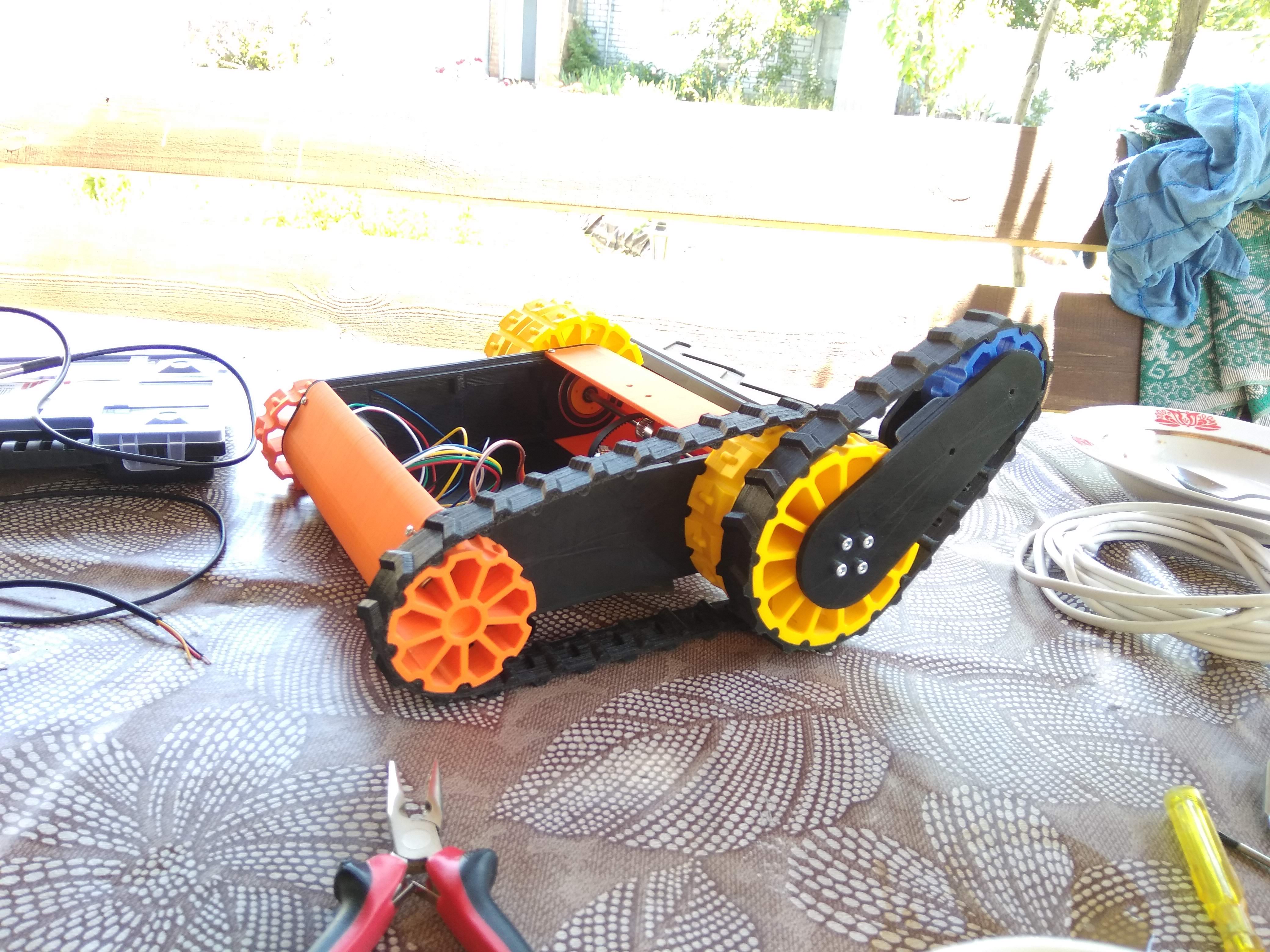 Die erste Version des Designs mit gedruckten Schienen mit einem Gürtel und einem Servo zum Drehen der Vorderseite der Schienen
Die erste Version des Designs mit gedruckten Schienen mit einem Gürtel und einem Servo zum Drehen der Vorderseite der SchienenErste Arbeit an Fehlern
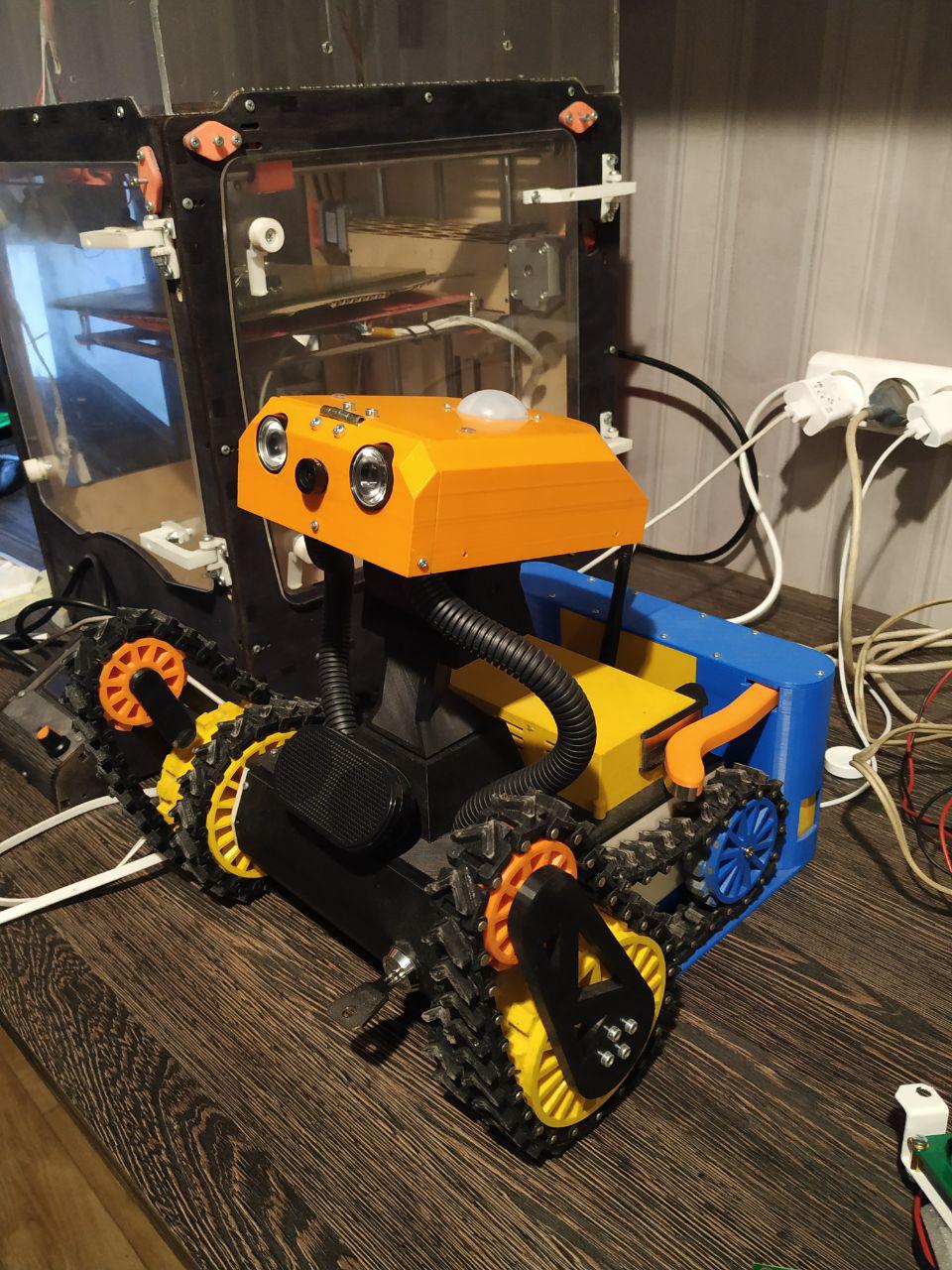
Nachdem ich an einem Webinar über Robotik teilgenommen hatte, traf ich eine Person, die Leiterplatten entwickelt, und entschied für mich, dass es für mich einfacher ist, technische Spezifikationen zu skizzieren und eine Lösung von einer Person zu erhalten, die sich mit Leiterplatten-Design und Geräteentwicklung auskennt. Gleichzeitig begann ich mit der Arbeit an einem neuen Gebäude, um das letzte Mal auf meine Türpfosten zu schauen. Und hier trete ich noch einmal bis zum Ende auf den gleichen Rechen, ohne zu verstehen, wie die gesamte Elektronik aussehen wird, welche Abmessungen sie haben wird und wie ich alles platzieren werde. Wir diskutierten, dass es sich um eine modulare Lösung handeln würde. Ich hatte einige Platinen, zum Beispiel Motortreiber, Batterien, und begann, das Projekt neu zu simulieren, zog aber bereits jede Platine mit Befestigungslöchern, Kabelausgängen, Heizkörpern usw. vollständig heraus. um nicht wieder auf das Problem des Platzmangels zu stoßen. Tatsächlich war ich durch die Größe des Druckbereichs auf 200 * 200 * 200 mm begrenzt, und ich habe versucht, diese Version des Gehäuses aus einem Teil zu machen, für dessen Druck etwa 400 g Kunststoff und mehrere Tage benötigt wurden.
Nach mehreren Versuchen mit Rissen am zweiten Tag, als ich mich vom Tisch löste, wurde mir klar, dass das vorgefertigte Gebäude keine so schlechte Idee ist. Das Wiederherstellen einiger Teile würde viel weniger Zeit in Anspruch nehmen und die Probleme mit dem Drucker wären viel geringer. Nachdem ich im Laufe der Zeit einen Satz Kabelplatinen mit all meinen Wünschen erhalten hatte, lernte ich, mit Schieberegistern und Multiplexern zu arbeiten, und begann zumindest irgendwie, die für mich unverständlichen Schaltkreise und Geräte zu verstehen. Zu diesem Zeitpunkt hatte ich die Mechanik noch einmal komplett überarbeitet. Er änderte das Rotationsprinzip der vorderen „Pfoten“ von einem Servo zu einem Schneckengetriebemotor. Er verließ die Idee, Riemen für Raupen aus einem gummiartigen Elasthan zu drucken, und wandelte sie in gewöhnliche vorgefertigte Kunststoffschienen um, die auf Nägeln montiert und mit Elasthanprofilen aufgeklebt waren. Zunächst wurde ein Belüftungssystem durchdacht, das Luft von hinten von hinten durch das Belüftungssystem durch alle Bretter führte, Rohre, in denen die Drähte in den „Kopf“ eingeführt wurden und heiße Luft aus ihm herausblasen. Und dieses Belüftungssystem funktionierte sogar irgendwann, aber dann wurde alles wieder aufgebaut, sodass ich die Abdeckung leichter mit einer Reihe von Schlitzen und passiver Belüftung bedrucken konnte.
Was ist im Moment
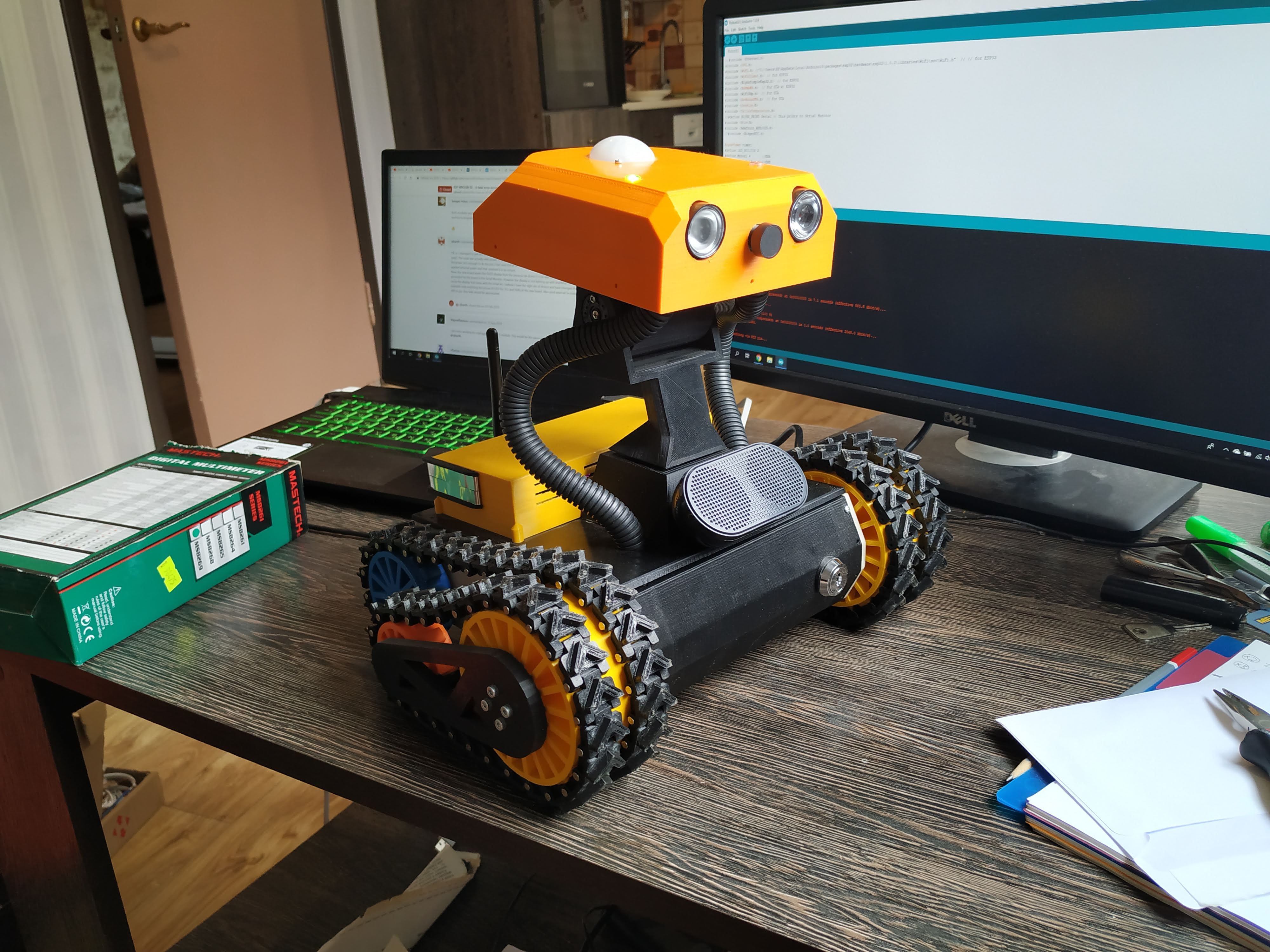
Am Wochenende in Dnepr fand das technische Festival Interpipe TechFest statt, bei dem ich beschlossen habe, den Menschen zu zeigen, was ich jetzt habe, den Meinungen anderer zuzuhören und mit odnodumtsami zu sprechen. Dort hörte ich wieder einmal, dass es möglich sein würde, irgendwo zu schreiben, zum Beispiel über Habré, und Feedback von Leuten zu bekommen.
Tatsächlich ist es für mich eine Plattform, auf der ich lernen werde, mit ROS zu arbeiten, im Weltraum zu navigieren, die Bestrafung wieder aufzubauen, mit einem Festkörper-Lidar zu arbeiten, auf den ich vom Kickstarter warte. Ich möchte so etwas wie eine echte Stereokamera schrauben. Ich verstehe, dass das Gehirn von Himbeeren mir wahrscheinlich nicht ausreichen wird und ich mit der Zeit zu etwas Stärkerem wechseln werde.
Jetzt kann dieser Roboter als "Heimwächter" eingesetzt werden. Während die Verwaltung über dieselbe Blynk-Anwendung erfolgt. Es ist mit einem Kuppelbewegungssensor, einer Kamera mit der Fähigkeit zum Ein- und Ausschalten des IR-Filters und der IR-Beleuchtung ausgestattet. Nachdem ich den Schutzmodus über das Telefon aktiviert habe, erhalte ich eine Benachrichtigung auf dem Telefon. Ich kann RaspberryPi 3 einschalten, Streaming, Streaming + Videoaufzeichnung starten und Fotos aufnehmen, die an meine E-Mail gesendet werden. Ich kann nachsehen, was dort zu Hause passiert, und zur Ladestation zurückkehren.
Die selbst zusammengebaute 4s2p-Batterie aus den 18650-Modulen mit jeweils 3200 mAh ermöglicht mir eine Fahrt von ca. 8 Stunden ohne Aufladen bei eingeschaltetem Gerät und Videoübertragung und ohne Optimierung der Energieeinsparung. Hände haben dies bisher nicht erreicht. Mit Google TextToSpeach liest der Roboter den Text, indem er in das Terminal dieser Anwendung schreibt. Und das alles von überall auf der Welt, wo ich eine Internetverbindung habe.
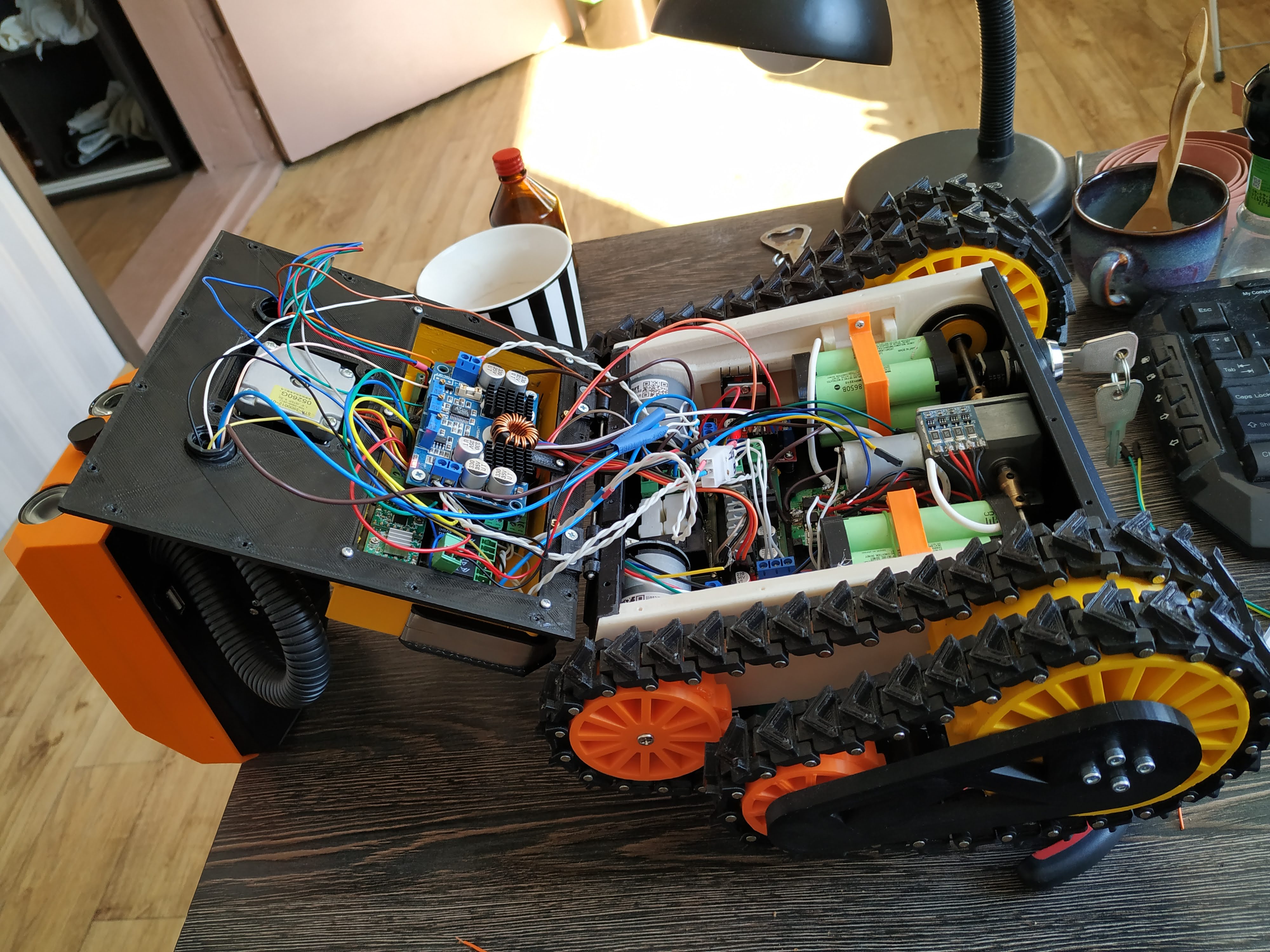 Ein bisschen Zinn drinnen
Ein bisschen Zinn drinnen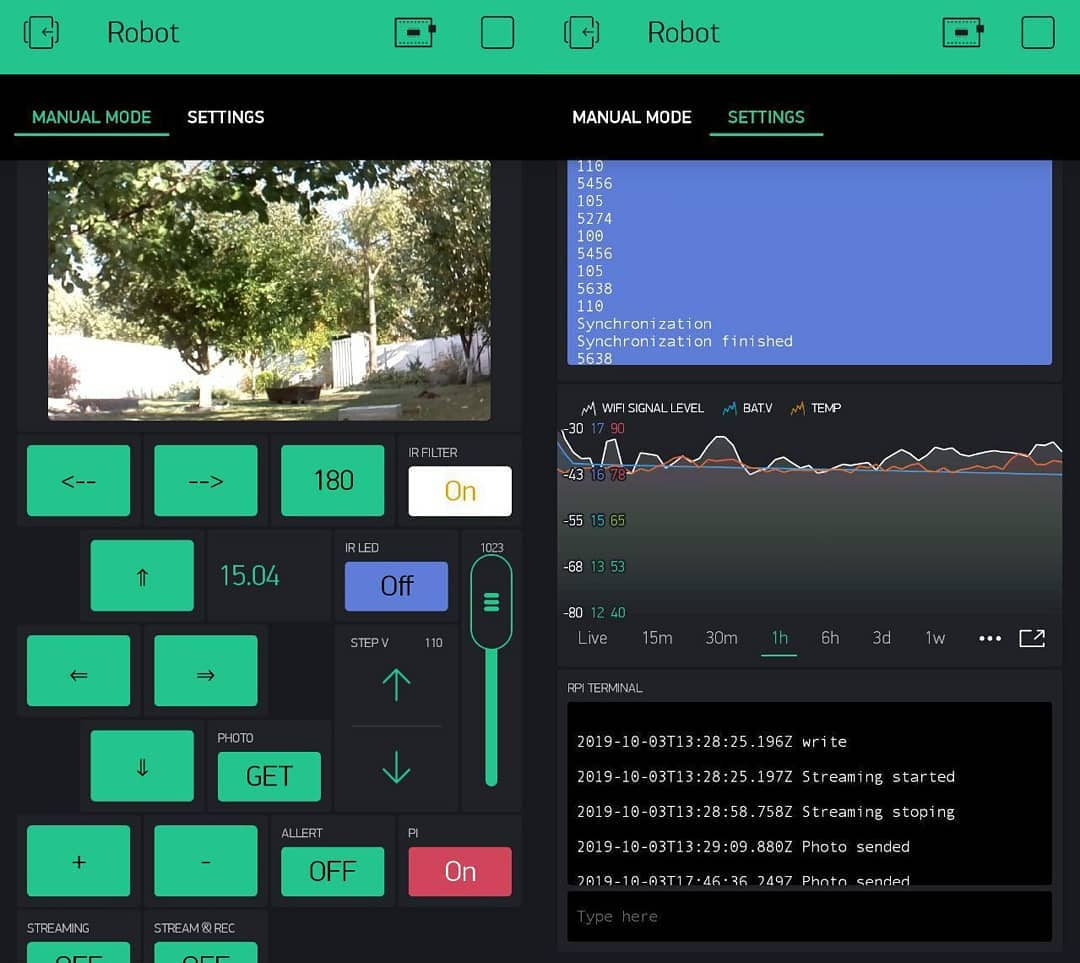 So steuert die Benutzeroberfläche das Telefon
So steuert die Benutzeroberfläche das TelefonWas kommt als nächstes und warum schreibe ich das alles?
Im Allgemeinen bestand der Zweck des Besuchs der Ausstellung darin, neue Bekanntschaften mit Odnodumtsami zu machen, die bereit waren, etwas mit Robotik zu tun. Ich bin es leid, nur als Programmierer zu arbeiten und Desktop-Anwendungen zu schreiben. Das ist nicht so cool, wie es einmal schien, und ich denke, dass sich diese Richtung allmählich biegt. Anstatt mich für die WEB-Entwicklung neu zu lernen, habe ich mich entschlossen, die Richtung radikal zu ändern und mein Leben mit Robotik und IOT zu verbinden, was mir sehr gefällt. Für mich selbst entschied ich, dass ich bei der Arbeit, die nicht mit diesem Bereich zu tun hatte, nicht genug Zeit hatte. Ich muss wählen, was ich brauche und was ich mag und will, ich habe etwas Geld gespart, die Arbeit verlassen und angefangen, all das zu studieren.
Ich habe verschiedene Ideen zum Thema Robotik, deren Hauptthema sich auf die Landwirtschaft bezieht, basierend auf Computer Vision, Tiefenkarten, Objekterkennung usw. Ich verstehe, dass es viel Arbeit gibt und jetzt habe ich gerade angefangen, mich mit ROS zu beschäftigen. Ich habe technische Kenntnisse, die Fähigkeit, mit CAD / CAE-Systemen zu arbeiten, und kann im Prinzip wirklich alles selbst erledigen, aber ich verstehe, wie viel Arbeit an Mechanik, Entwicklung, Fehlkalkulationen geleistet werden muss, und lerne vollständig, wie man mit ROS, Tiefenkarten, Sensoren und räumlicher Ausrichtung arbeitet und es wird sehr schwierig sein, sich an alles zu erinnern. Deshalb suche ich mehrere Personen. die bereit sind, sich ernsthaft an diesem Startup zu beteiligen und einer der Mitbegründer zu werden. Natürlich kann ich nicht versprechen, dass alles cool wird und in einem halben Jahr wird unser Startup uns viel Geld bringen, aber bis diese Nische voll ist, können Sie versuchen, etwas auf der Ebene des ersten Prototyps zu implementieren und zu Beschleunigern, Crowdfunding-Plattformen und mache irgendwie Werbung für dich.
Ich bin auch bereit, Vorschläge in diese Richtung zu prüfen. Ich bin bereit, mit jemandem an einem Startup zu arbeiten, oder nicht unbedingt an einem Startup, sondern einfach an der Entwicklung eines Unternehmens, aber in eine für mich interessante Richtung.
Daher würde ich gerne Kommentare zu diesem Thema hören. Vielleicht interessiert das doch jemanden. Ich selbst lebe in der Stadt Dnepr in der Ukraine. Dementsprechend wäre es richtiger, an einem Projekt in relativer Nähe zu arbeiten, obwohl in Hunderten von Kilometern statt in Tausenden alle Optionen in Betracht gezogen werden.
Wenn Sie Fragen zum Gerät meines Roboters haben, bin ich bereit zu antworten und zu diskutieren. Auch auf der Facebook-Seite gibt es mehrere Videos des Roboters und seiner Überwindung von Hindernissen
Wenn überhaupt, können Sie mich immer hier auf
Facebook finden oder schreiben Sie mir auf marchenko.andrii@gmail.com