 In einem früheren Artikel habe
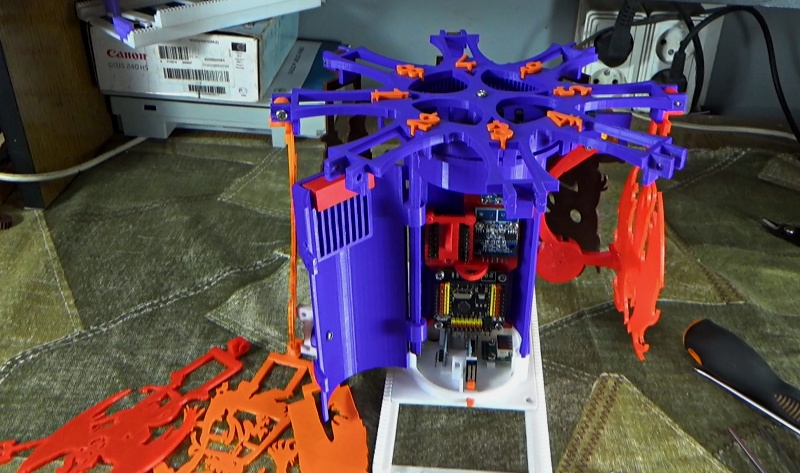
In einem früheren Artikel habe ich über meine neue Entwicklung gesprochen - das dämonische Karussell-Roboterspielzeug. Ich habe dieses Modell grundlegend verfeinert, und obwohl das Gerät immer noch nicht funktioniert (ich muss noch ein Programm schreiben), muss ich Ihnen noch etwas zeigen und sagen. Das Design des Ziels hat sich stark verändert und das Prinzip des Schießstandes ist gleich geblieben.
Alle Teile des Schießstandes wurden fast 50 Stunden lang mit einer Geschwindigkeit von 50 und einer Schicht von 0,1 mm auf einem 3D-Drucker gedruckt. Das Drucken könnte schneller sein, aber dann würde die Qualität des Geräts darunter leiden.
Für die neue Version des Spielzeugs habe ich ungefähr 350 Gramm Filament ausgegeben. Aber natürlich brauchte es viel mehr, um ein Filamentmodell zu entwickeln, das alle Versuche und Irrtümer berücksichtigte.
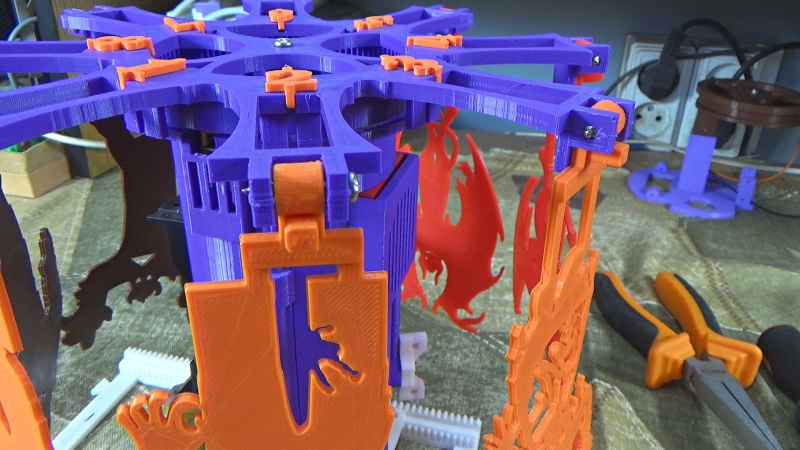
Die neue Version des Zielhalters sieht jetzt eleganter aus, außerdem hat sie weniger Filament benötigt als die vorherige Version dieses Geräts. Dank dessen konnte ich auch die Anzahl der Schrauben von zwei auf eins reduzieren, um jedes der acht Ziele zu befestigen.

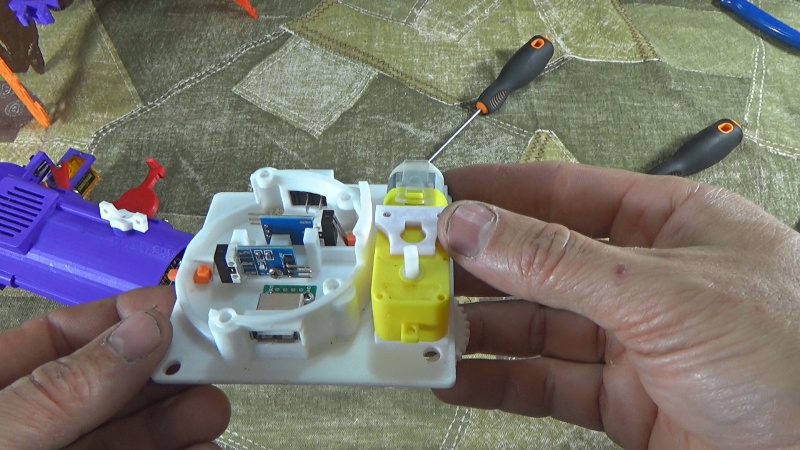
Für eine genaue Zielpositionierung ist ein zylindrisches Zahnrad mit Innenzahneingriff implementiert. So habe ich die Nachteile der ersten Option vermieden, bei der der Zielhalter direkt auf der Motorwelle montiert war.

Zwei Optokoppler bringen das Ziel in die richtige Position unter der Hebevorrichtung. Die Verwendung von Optokopplern ist eine kostengünstige Option, daher habe ich in diesem Modell keinen magnetischen Positionssensor verwendet, der etwa sieben Dollar kostet. Ich habe auch eine Testversion mit einem magnetischen Positionssensor erstellt, aber es stellte sich heraus, dass dies nur die Kosten der Struktur erhöht und den Betrieb des Geräts nicht wesentlich verbessert.
Damit die Optokoppler an den richtigen Stellen arbeiten können, befinden sich auf der Rückseite des Zielhalters zwei Sektoren. Ein Sektor mit einer Position ermöglicht es Ihnen, die Anfangsposition des Ziels zu bestimmen. Im zweiten Sektor gibt es acht Positionen, die bestimmen, ob sich unter der Hebevorrichtung ein Ziel befindet.
Der Mechanismus der Hebevorrichtung mit der Position des Stoßsensors blieb nahezu gleich, hier hat das Design keine besonderen Änderungen erfahren.

Da sich auf der Power Bank kein Körper befindet, befindet sich die Power Bank-Platine am Ende des zylindrischen Ständers, der als Halter der gesamten Zielstruktur fungiert. Der Nachteil des Designs besteht darin, dass Sie den USB-Anschluss und den Schalter, der sich auf der Platine der Bank befindet, ablöten müssen, da sonst die Bank nicht an ihren Platz gelangt.


Ich habe den Zugang zur Lithiumbatterie nicht eingeschränkt und sie mit dem Gehäuse abgedeckt, obwohl dies weiter verbessert werden kann: Es gibt spezielle quadratische Löcher im Gehäuse dafür. Die Schrauben werden durch diese Löcher geschraubt, um die Power Bank am Gehäuse zu befestigen. Diese Öffnungen können ein Befestigungselement für das Gehäuse sein, das die Lithiumbatterie verbirgt.
Es gibt zwei weitere Löcher im Gehäuse. Mit einer davon können Sie das USB-Laden an eine Power Bank anschließen, und mit der zweiten können Sie den Status der LEDs visuell überwachen.
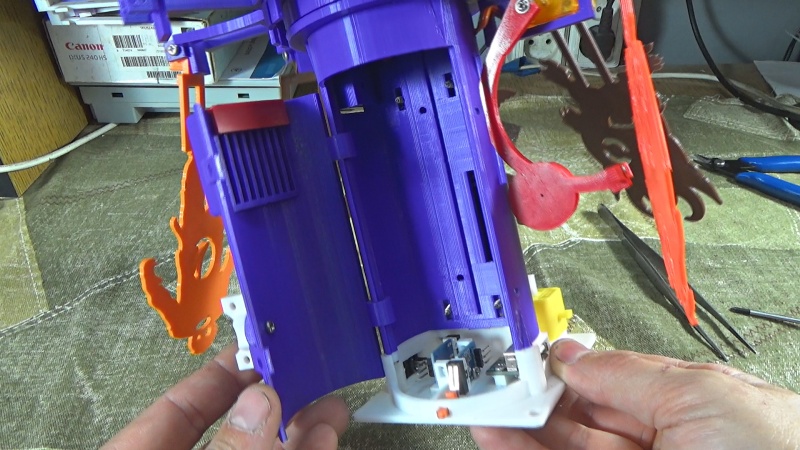
Der zylindrische Ständer ist hohl, sodass die gesamte verwendete Elektronik darin platziert werden kann. Für den Zugang ist eine spezielle Tür vorgesehen.
Die Platinen der verwendeten Module, einschließlich des Mikrocontrollers, werden mit den kurzen M3-Schrauben an der Frontblende befestigt. Natürlich besteht die falsche Platte aus Kunststoff und wird auch mit zwei Schrauben am Körper befestigt.
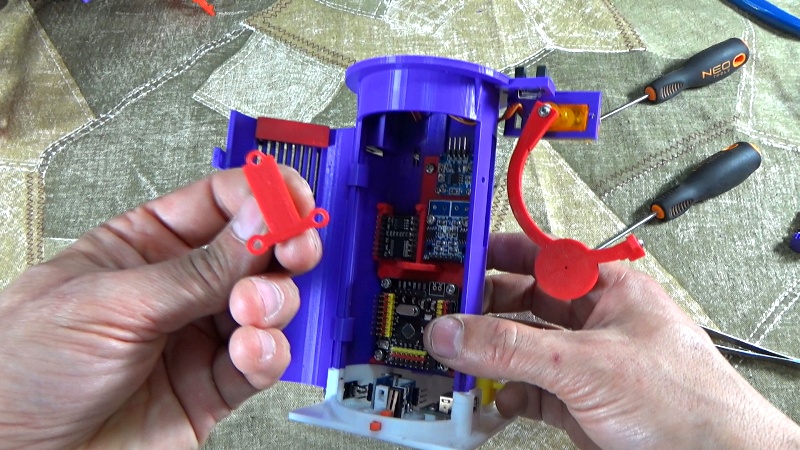
Eine Ausnahme bildete das Soundmodul, das nicht für die Schraubmontage ausgelegt ist. Daher ist das Soundmodul in einer speziellen Nische fixiert. Übrigens wird für die Verwendung ein Lautsprecher benötigt, der sich perfekt in das Türdesign einfügt.

Ich habe mich verbessert und die mobile Plattform. Endschalter zur Einschränkung der Bewegung von Zielen auf Schienen sind jetzt im Gehäuse versteckt. Die Übertragung zu den Endschaltern von den Endanschlägen auf den Schienen erfolgt über Drücker. Diese Drücker sind zwei Kunststoffstreifen, die sich in den hohlen Nischen des Gehäuses der Baustelle befinden.
Das Design der Drücker legte besonderen Wert darauf, dass die Drücker nicht aus ihren Nischen fallen können.
In Zukunft plane ich, andere Geräte zu kombinieren, die noch über einen USB-Anschluss entwickelt werden müssen. Bis ich anfange zu spezifizieren, um welche Art von Geräten es sich handelt, kann ich nur sagen, dass dies sehr interessante Projekte sein werden.