
Im August 1913 führte Peter Nesterov eines der aufregendsten, gefährlichsten und komplexesten Manöver in der Luftfahrt durch - die Sackgasse. Zu dieser Zeit, vor allem angesichts der damaligen Technologie, und jetzt ist es ein echter Kunstflug. Viele moderne Profis und Amateure aus der Luftfahrt würden alles geben, um mit Nesterov zu sprechen. Leider ist dies nicht möglich, aber andere Kunstflug-Asse leben oft bei uns und stören uns oft. In der Regel bemerken wir sie entweder nicht oder fahren mit einem Pantoffel oder einer Zeitung durch die Wohnung, weil sie für uns Schädlinge, Träger von Infektionen und nur nervige Flyer sind. Aber für Wissenschaftler sind diese Kreaturen die Hüter der Geheimnisse von Flug und Landung. Heute werden wir mit Ihnen eine erstaunliche Studie über die Fähigkeit gewöhnlicher Fliegen treffen, kopfüber auf jeder Oberfläche zu landen. Welchen Landemechanismus verwenden Fliegen, aus welchen Prozessen besteht er und wie schwierig ist es, ihn künstlich in der Robotik umzusetzen? Dies erfahren wir aus dem Bericht der Forschungsgruppe. Lass uns gehen.
Studienbasis
Natürlich können Sie Fliegen nicht alle Lorbeeren der Überlegenheit beim Fliegen geben, da viele andere Insekten auch ihre einzigartigen Fähigkeiten im Bereich Flug und Landung haben. Die Fliegen sammelten jedoch sozusagen die maximale Anzahl solcher Fähigkeiten an sich, die in direktem Zusammenhang mit ihrer Anatomie stehen.
 Aussehen einer Fliege der Art Calliphora vomitoria.
Aussehen einer Fliege der Art Calliphora vomitoria.In dieser Studie spielten Fliegen der Art
Calliphora vomitoria (blaue Fliege) die Hauptrolle. Diese Art kommt in fast jeder Ecke des Planeten vor: von Südamerika bis Ostasien. Die Abmessungen dieser Fliegen sind mit 10 bis 14 mm ziemlich beeindruckend und ungefähr doppelt so groß wie die der normalen Stubenfliegen (
Musca domestica ). Äußerlich unterscheidet sich
Calliphora vomitoria von seinen Verwandten durch den blauen Bauch, dank dessen es auch als „
Bluebottle Fly “ bezeichnet wird, was auf die Ähnlichkeit mit der Farbe des blauen Flaschenglases hinweist.
Zusätzlich zu den äußeren Unterschieden zu Stubenfliegen hat
Calliphora vomitoria auch Verhaltensfliegen. Blaue Fliegen fliegen lieber in einem kleinen Schwarm als einzeln, wodurch sie schnell Nahrung finden können (normalerweise ist dies ein Nektar von stark riechenden Blumen). Wenn eine Person aus dem Schwarm Nahrung findet, verbirgt sie ein spezielles Pheromon, das allen anderen den Fund signalisiert.
Menschen verwenden beim Fischen oft Larven von blauen Fliegen als Köder, aber für Insekten ist dies nicht die einzigartigste und in Wahrheit nicht die würdigste Anwendung. Nicht nur die Fischer finden Gefallen bei den blauen Fliegen, sondern auch die Forensik. Fliegen sind bekanntlich nicht zimperlich, weil die Leichen von Tieren und Menschen sie nicht erschrecken, sondern anziehen. Für Forensiker ist dies ein zusätzliches Kriterium für die Abschätzung des Todeszeitpunkts, da blaue Fliegen einen sehr klaren Zusammenhang zwischen der Wachstumsrate ihrer Larven und der Umgebungstemperatur haben. Wenn man die Temperatur kennt, kann man aus den Larven den Zeitpunkt bestimmen, zu dem die Eier gelegt wurden.
Aber heute werden wir nicht über Forensik sprechen, sondern über Luftfahrt. Inverted-Fit-Studie, d.h. Die Landung an der Decke, wie Wissenschaftler es nennen, wurde früher durchgeführt, aber nicht so detailliert. Es wurden jedoch einige interessante Nuancen entdeckt. Bei Beobachtungen der umgekehrten Landung von Stubenfliegen stellten Wissenschaftler fest, dass sie vor dem Kontakt der
ipsilateralen Pfoten mit der Oberfläche "halbkreisförmige" Rotationsbewegungen ausführen.
Ipsilateral * - befindet sich auf derselben Seite (übertrieben ist der linke Arm einer Person in Bezug auf das linke Bein ipsilateral).
Nach dieser Bewegung trat die seitliche Schwingung des Körpers mit Hilfe der Beine auf, was zum Kontakt der verbleibenden Beine mit der Oberfläche führte. Diese und andere Manöver vor der tatsächlichen Landung sind natürlich auf den Sensor zurückzuführen, d.h. visuelle, taktile und andere Signale, die die Fliege vor der Landung empfängt.
In unserer heutigen Studie haben Wissenschaftler der University of Pennsylvania eine Reihe von Beobachtungen zur Landung von blauen Fliegen auf einer umgekehrten Oberfläche in einer Flugkammer (in einem Windkanal) unter Verwendung von Hochgeschwindigkeitsvideo (
1A ) durchgeführt.
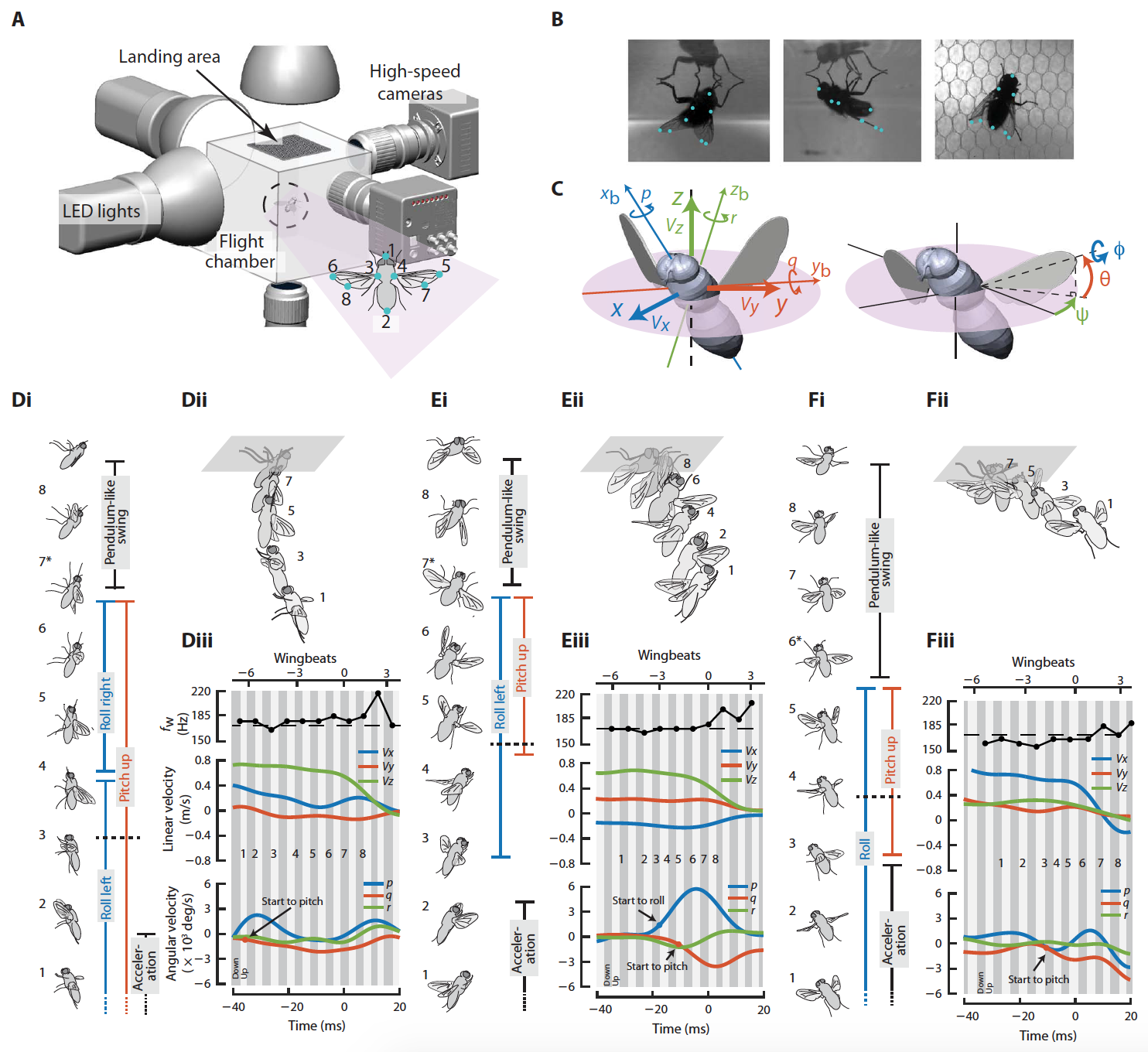 Bild Nr. 1
Bild Nr. 1Die Kinematik des Körpers und der Flügel der Fliegen wurde durch Digitalisieren anatomischer Markierungen (
1B und
1C ) erhalten.
Beobachtungsergebnisse
Zunächst beschlossen die Wissenschaftler, die Verhaltensaspekte einer erfolgreichen Landung zu isolieren und zu analysieren.
Sie stellen fest, dass Fruchtfliegen vor dem Pflanzen durch kontinuierliche Verzögerung und leichte Rotation des Körpers auf vertikalen Oberflächen landen. Die blauen Fliegen während der Landung zeigten jedoch sofort 4 aufeinanderfolgende Verhaltensaspekte: vertikale Beschleunigung, Rotationsmanöver des gesamten Körpers, Streckung der Beine und Schwanken des gesamten Körpers, wobei die Vorderpfoten stabil auf der Oberfläche fixiert waren. Die Dauer des gesamten erfolgreichen Landevorgangs betrug nach 18 Beobachtungen ca. 4–8 Flügelaufprall, während die durchschnittliche Flügelaufprallfrequenz 172,7 ± 7,7 Hz betrug.
Während erfolgreicher Landungen beobachteten die Wissenschaftler auch signifikante kinematische Änderungen der Rotationsachsen, der Werte von Rotationsmanövern und des Grads des Schaukels des Körpers aufgrund der Pfoten.
Nachdem alle Beobachtungen gesammelt worden waren, identifizierten die Wissenschaftler die Hauptstrategien während der Landung, die wie folgt klassifiziert wurden: dominant in der
Steigung * , dominant in der
Rolle * , kombiniert und dominant in der seitlichen / longitudinalen Schwankung.
Pitch * - die Winkelbewegung des Körpers relativ zur horizontalen Querachse.
Rolle * - die Drehung des Körpers um seine Längsachse.
Video Nr. 1: Landung mit einer vorherrschenden Tonhöhe (entspricht Bild 1D).Video Nr. 2: Landung mit einer vorherrschenden Rolle (entspricht Bild 1E).Die Bilder
1D -
1F zeigen typische Verhaltensmuster einer blauen Fliege während der Landung. In den ersten beiden Beispielen verwendeten Fliegen schnelle Rotationsmanöver, hauptsächlich relativ zur Nickachse (
1D und Video Nr. 1) oder Rollachse (
1E und Video Nr. 2), die ihren Körper vor der Landung in eine fast umgekehrte Ausrichtung (Bauch nach oben) versetzten.
Die Ausrichtung der Pfoten erfolgte fast unmittelbar nach Beginn der Rotationsmanöver (horizontale schwarz gepunktete Linien auf
1Di und
1Ei ). Nachdem die Pfoten die Oberfläche berührt hatten, begann die Schwingphase des Körpers.
Es ist merkwürdig, dass die durchschnittliche Winkelgeschwindigkeit von Rotationsmanövern ungefähr 4000 ° / s erreichte und ihr Maximalwert 6000 ° / s überschreiten könnte, was deutlich höher ist als der von Fruchtfliegen oder sogar Kolibris.
Video Nr. 3: Landung mit der vorherrschenden Längsschwingung des Körpers (entspricht Bild 1F).In der dritten Version stützten sich die Fliegen fast ausschließlich auf das Schwanken des Körpers mit ihren Pfoten (
1F und Video Nr. 3), und das Rotationsmanöver war unbedeutend.
Video Nr. 4: Landung mit vorherrschender seitlicher Körperbewegung.Im Vergleich zu den ersten beiden Optionen wurden bei dieser Landestrategie wahrscheinlich mehr mechanische und strukturelle Prozesse verwendet (z. B.
Adhäsion * aufgrund von
Pulvillas * oder
Dämpfung * aufgrund der Viskoelastizität der Pfoten), was die Übertragung des linearen Impulses des Körpers auf den Rotationsimpuls erleichterte .
Adhäsion * - Adhäsion von Oberflächen unterschiedlicher Herkunft (z. B. Tautropfen auf dem Gras).
Pulvilla * - weiche Polster der Beinspitze , die sich jeweils unter der Klaue befinden. Die Hauptaufgabe von Pulvillas besteht darin, das Insekt auf einer glatten oder geneigten vertikalen Oberfläche zu halten.
Dämpfung * - künstliche Unterdrückung von Schwingungen.
Der nächste Schritt in der Studie bestand darin, die kinematischen Unterschiede zwischen erfolgreichen und erfolglosen Landungen zu untersuchen.
Video Nr. 5: Landung mit kombinierter Roll-Pitch-Mechanik.Zu den erfolglosen Landungen gehörten solche, die in einer Kollision mit der Oberfläche endeten (was für Wissenschaftler die Daten für die Analyse ist, für die Fliegen natürlich eine Gehirnerschütterung, bildlich gesprochen).
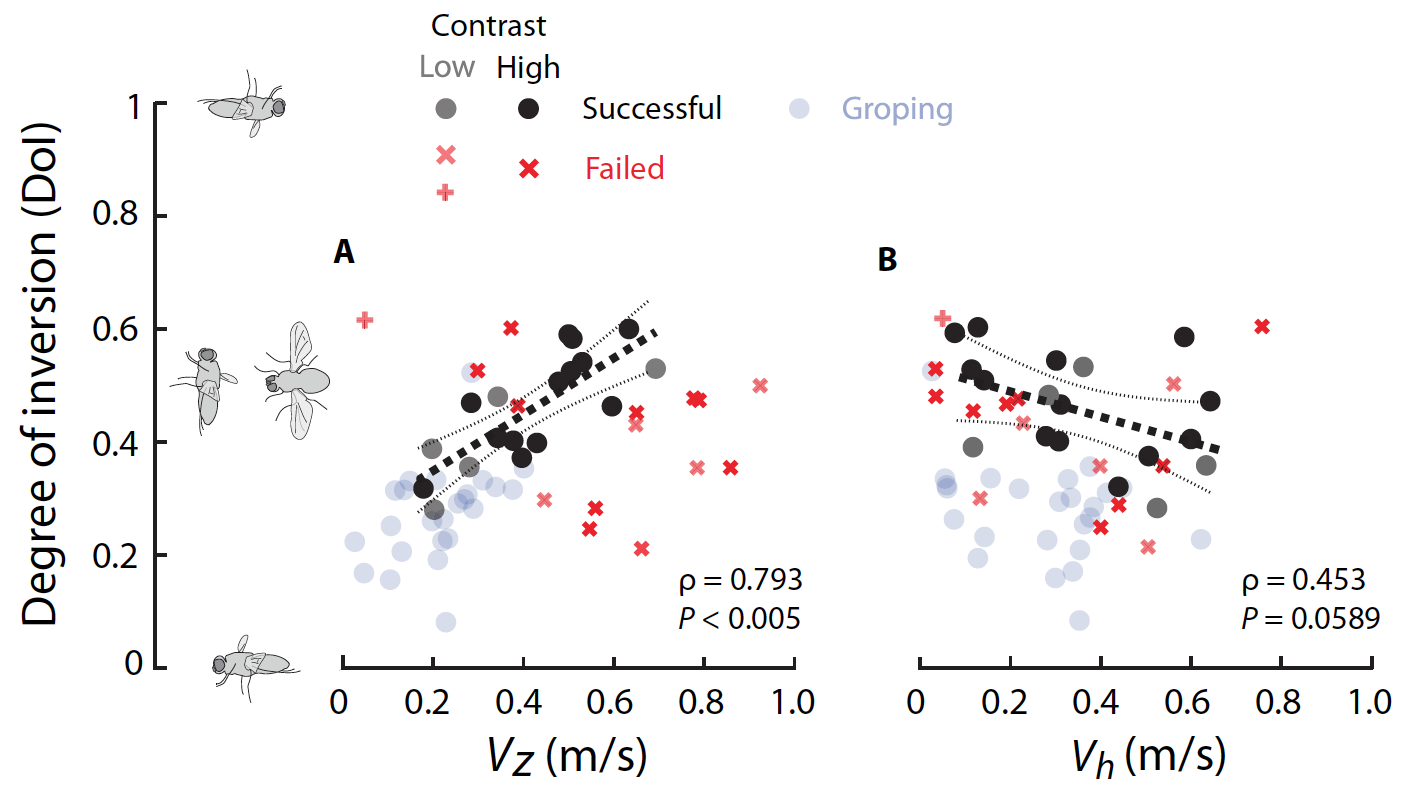 Bild Nr. 2
Bild Nr. 2Um zu quantifizieren, wie gut der Fliegenkörper ausgerichtet war, wurde ein Inversionsgrad (DoI vom
Inversionsgrad ) berechnet, der den Grad misst, in dem der Fliegenkörper vor der Landung mit seiner vollständig invertierten Ausrichtung ausgerichtet ist. DoI variiert von 0, was bedeutet, dass keine Inversion des Körpers vorliegt, d.h. Bauch bis 1, was eine Umkehrung des gesamten Körpers bedeutet, d.h. Bauch hoch. Bei erfolgreichen Landungen stieg der DoI mit einer vertikalen Geschwindigkeit (
2A ) an, nahm jedoch mit einer Längsgeschwindigkeit (
2B ) ab.
Diese Beobachtung zeigte, dass die Fliegen mehr rollen mussten, wenn ihre Aufstiegsgeschwindigkeit höher war oder wenn ihre horizontale Geschwindigkeit niedriger war. Bei den meisten erfolglosen Landungen (insgesamt 15) wurden die Fliegen vor dem Zeitpunkt der Landung nicht auf den Kopf gestellt, verglichen mit der Position der Fliegen, die erfolgreich landeten.
Die Ursache des Versagens kann eine vorzeitige oder unzureichende Rotation des Körpers vor der Landung sein. Somit konnten diese Fliegen nicht richtig an der Decke landen, sondern stießen hinein.
Video Nr. 7: Fehlgeschlagene Landung aufgrund eines zu frühen Rotationsmanövers.Darüber hinaus kam es auch zu erfolglosen Landungen aufgrund einer zu frühen Rotation des Körpers (Video Nr. 7), da eine frühere Inversion zu einer unzureichenden vertikalen Geschwindigkeit führte, die zum Erreichen der Decke erforderlich war (in den Grafiken
2A und
2B mit einem „+“ gekennzeichnet).
Video Nr. 8: erfolglose Landung aufgrund schwacher Umkehrung des Körpers mit vorzeitiger Ausrichtung der Beine.Ein weiterer Grund für die Fehler war trotz der korrekten Umkehrung und Bewegungsgeschwindigkeit die späte Ausrichtung der Pfoten, die zu einer falschen Position und damit zu einem unzureichend zähen Kontakt mit der Oberfläche führte (Video Nr. 8).
Video Nr. 6: Ein Beispiel für eine Kontaktlandung an der Decke.Trotz aller Einstiche und Mängel konnten sich einige Fliegen mit einer Kontaktlandung noch erholen und erfolgreich landen. In diesem Fall fliegen die Fliegen mit geringer vertikaler Geschwindigkeit unter der Decke, fühlen dann die Oberfläche mit den Vorderpfoten und klammern sich und landen (Video Nr. 6).
Video Nr. 9: Fehlgeschlagene Landung aufgrund einer schwachen Inversion des Körpers mit leichter Rotation des Körpers.Zusammenfassend kamen die Wissenschaftler zu dem Schluss, dass die kinematischen Aspekte der Landung der Fliege viel mehr unterschiedliche neuronale Prozesse enthalten als bisher angenommen. Das auffälligste Merkmal ist immer noch das Rotationsmanöver. Es bleibt nur zu verstehen, was es provoziert oder welche Signale dazu führen, dass die Fliege es zur Landung benutzt.
Das erste, was mir in den Sinn kommt, sind natürlich die visuellen Signale, die die Fliegen erhalten, wenn sie sich der Decke mit einer linearen Geschwindigkeit nähern, die aus drei Komponenten (
1C ) besteht: vertikal (
V z ), longitudinal (
V x ) und lateral (
V y ).
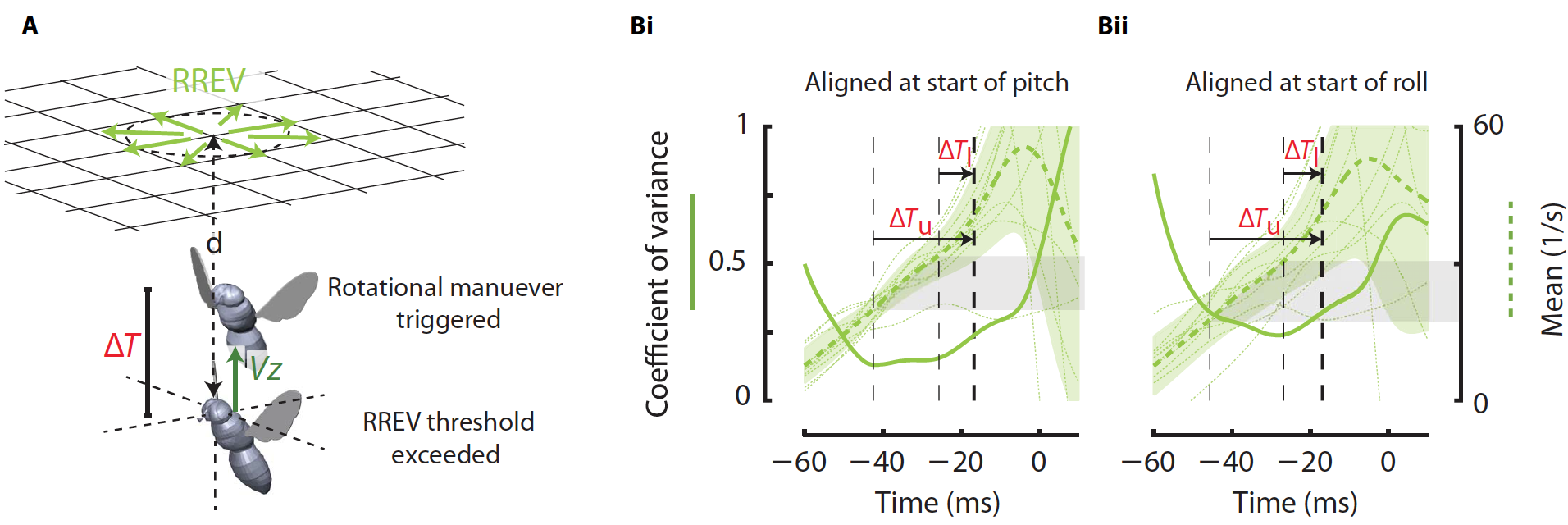 Bild Nr. 3
Bild Nr. 3Dank der Arbeit ihrer Vorgänger kennen die Forscher die drei Haupttypen visueller Hinweise, die zur Bewertung der Fliegenbewegung erforderlich sind, genau.
Erstens die relative Netzhautexpansionsrate (
RREV ) aufgrund unbeweglicher Reize (
3A ). Dieser Indikator kann als Verhältnis der Steigerungsrate des Ziels zu seiner tatsächlichen Größe auf der Netzhaut der Fliege während der Aufwärtsbewegung (
V z ) berechnet werden. RREV entspricht auch dem Kehrwert der Zeit bis zur Kollision (
t ). RREV wird als wichtiges Wahrnehmungssignal angesehen, das die Annäherungsgeschwindigkeit während der Landung oder des Gehens um Hindernisse steuert.
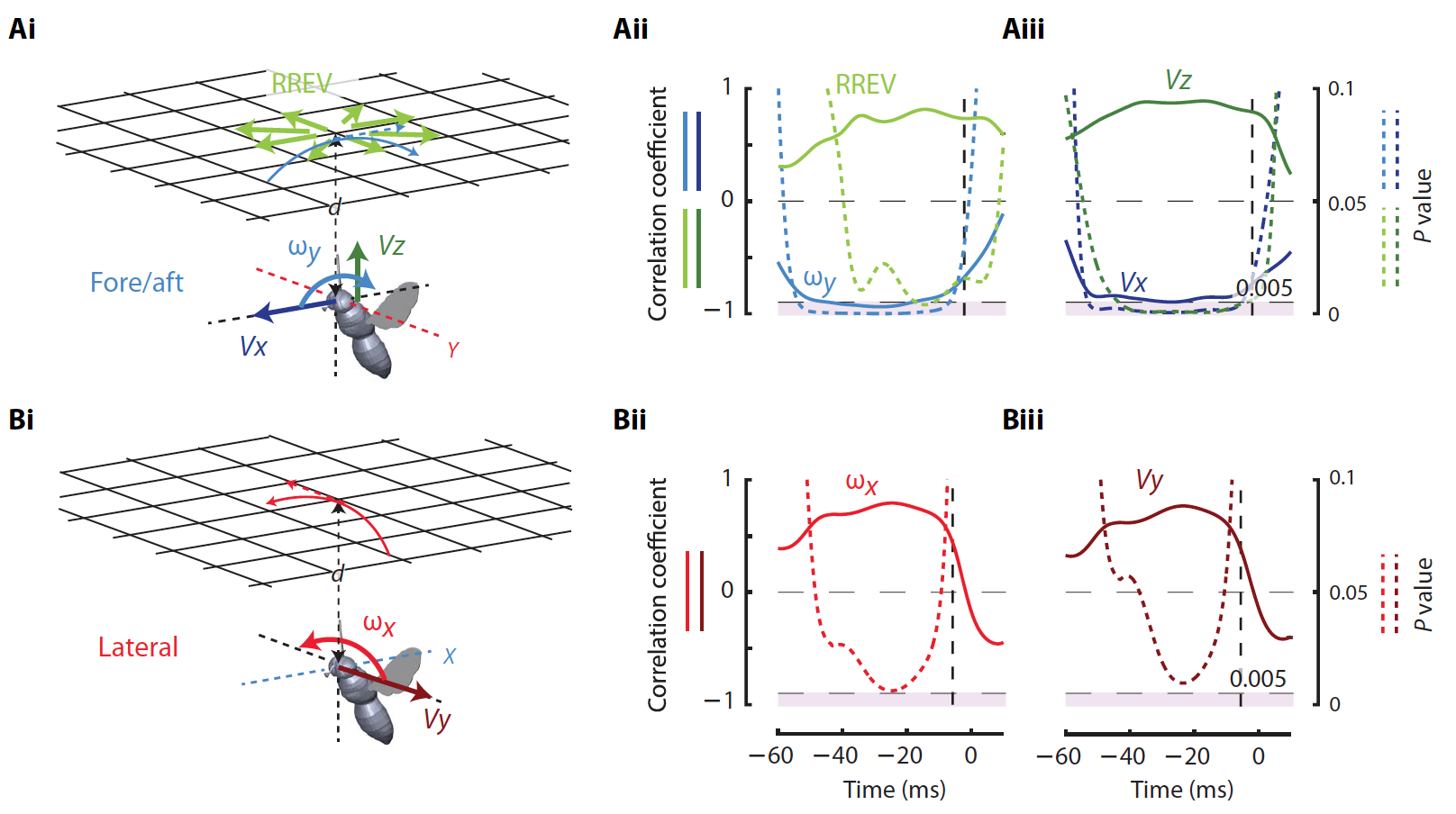 Bild Nr. 4
Bild Nr. 4Zweitens die relative Winkelgeschwindigkeit der Längsrichtung (
4Ai ) der Decke auf der Fliegenretina (ω
y ). Diese visuellen Hinweise sind das Ergebnis der Vorwärts- / Rückwärtsbewegung des Körpers (
V x ), d.h. in horizontaler Richtung. Es wurde zuvor festgestellt, dass es diese Signale sind, die die Landung auf horizontalen Flächen regulieren.
Drittens die relative
Querwinkelgeschwindigkeit der Decke (ω
x ) auf der Fliegenretina (
4Bi ), die als Ergebnis der seitlichen Bewegung (
V y ) erhalten wird.
Die Forscher schlagen vor, dass das Rotationsmanöver nach einer festgelegten Zeitverzögerung beginnt, wenn das provokative (Signal, das zur tatsächlichen Aktion führt) visuelle Signal einen Schwellenwert erreicht. Diese Annahme ermöglicht es uns, die Beziehung der obigen Signale und die Bewegungsmanöver der Fliege während der Landung zu bewerten.
Der erste Schritt bestand darin, die Zeitkurven des Variationskoeffizienten (CV) jedes der visuellen Signale zu berechnen. Als Grundlage dienten die Beobachtungen, bei denen die Fliegen beim ersten Versuch erfolgreich an der Decke landeten.
Wenn Rotationsmanöver nach einer gewissen Verzögerung gestartet wurden und das visuelle Signal einen Schwellenwert erreichte, sollte der CV dieses visuellen Signals minimal sein. Außerdem sollte es niedriger sein als das anderer nicht provokativer visueller Signale, d.h. Das provokative visuelle Signal sollte die geringste Streuung aufweisen. Beobachtungen und Berechnungen zeigten, dass unter den drei getesteten Signalen RREV zum Zeitpunkt des Drehens der Drehung (15%) und des Rollens (25%) den niedrigsten CV-Wert aufwies, während die beiden anderen visuellen Signale einen signifikant höheren CV (
3B )
aufwiesen .
Dies bedeutet, dass RREV das wichtigste visuelle Signal ist, das den Start eines Rotationsmanövers während einer umgekehrten Landung auslöst.
Der CV-Wert für RREV war zwischen 7 ms (∆T
l ) und 27 ms (∆T
u ) vor Beginn des Rotationsmanövers minimal. Folglich lag die visuelle Verzögerung DT zwischen dem Moment der Wahrnehmung und dem Beginn des Manövers in diesem kleinen Bereich. Es wurde auch festgestellt, dass die kritische Zeit vor einer Kollision, unterhalb derer ein Rotationsmanöver gestartet wird (um eine Kollision zu vermeiden und erfolgreich zu landen), 31-53 ms beträgt. Zum Vergleich: Für Fliegen, die auf vertikalen Flächen landen, beträgt diese Zahl 76 ms. Mit anderen Worten, wenn Fliegen an der Decke landen, haben Fliegen deutlich weniger Zeit für Fehler.
Rotationsmanöver waren nach den Beobachtungen in Bezug auf Rollgeschwindigkeit und Steigung recht unterschiedlich. Diese Variabilität kann darauf hinweisen, dass das Rotationsmanöver nicht nur durch die Zeitkomponente, sondern auch durch andere sensorische Signale reguliert wird.
Fliegen verwenden sensorische Signale, um Rotationsmanöver über Direkt- und Rückkopplungskanäle bereitzustellen. Der direkte Kommunikationskanal gibt spontane Steuerbefehle aus, die signifikante vorübergehende Änderungen in der Bewegung des Flügels verursachen. Diese Änderungen wirken sich direkt auf die Amplitude der primären Reaktion auf das Manöver aus.
Der Rückkopplungskanal liefert eine Ausgleichsreaktion, die eine kleine Änderung in der Bewegung des Flügels verursacht. Solche Änderungen wirken sich auf die Dämpfung (Vibrationsunterdrückung) und die Stabilisierung des Manövers aus.
Der Grad des Einflusses eines bestimmten Sensorsignals auf das Manöver wurde bewertet, indem die Korrelation der maximalen Roll- und Rotationsgeschwindigkeit während des Rotationsmanövers mit den sensorischen Signalen erfasst wurde, die von Fliegen vor oder nach dem Beginn der Manöver empfangen wurden.
Die vorgeschlagenen sensorischen Signale umfassen drei visuelle (RREV,
& ohgr;
x und & ohgr;
y ), die zuvor diskutiert wurden, und drei Komponenten der linearen Geschwindigkeit (
V x ,
V y und
V z ).
Die lineare Regressionsanalyse zeigte, dass über einen langen Zeitraum vor Beginn der Manöver die maximale Nickgeschwindigkeit positiv mit RREV (
4Aii ) und der vertikalen Geschwindigkeit
V z (
4Aiii )
korrelierte , jedoch negativ mit der Längsdrehung ω
y (
4Aii ) und der linearen Längsgeschwindigkeit
V x (
4Aiii ).
Die Spitzenrollgeschwindigkeiten korrelierten wiederum positiv mit der seitlichen Drehung ω
x (
4Bii ) und der seitlichen linearen Geschwindigkeit
V y (
4Biii ) während eines längeren Zeitraums vor und nach dem Beginn des Manövers.
Die Analyse zeigte auch, dass Fliegen die Stärke des Rotationsmanövers ändern können, um die Körperschwingungen zum Zeitpunkt der Landung, d. H. Die Übertragung eines linearen Impulses auf einen Winkelimpuls, effektiver zu nutzen.
Wie Beobachtungen zeigten, nahm die Tonhöhengeschwindigkeit ab, wenn der lineare Impuls hoch war, was durch die negative Korrelation zwischen dem Spitzenpegelpegel und den Sensorsignalen angezeigt wird. Anstelle von Pech drehen die Fliegen ihren Körper um, erhöhen so die Längsschwingung des Körpers mit ihren Pfoten und übertragen einen direkten linearen Impuls auf den Pechdrehimpuls.
Ein Anstieg der Rollgeschwindigkeit wurde auch beobachtet, wenn der laterale lineare Impuls hoch war, was durch eine positive Korrelation zwischen der maximalen Rollgeschwindigkeit und sensorischen Signalen angezeigt wird. Eine solche inverse Korrelation kann in Situationen auftreten, in denen Fliegen einen größeren Abstand benötigen, um ihre ipsilateralen Pfoten hoch genug anzuheben und die Decke zu erreichen, um den Körper weiter zu schaukeln.
Vergessen Sie nicht das wichtigste Merkmal von Flügen für Fliegen, d. H. über Flügel. Die Forscher analysierten die Kinematik der Flügel von Fliegen während einer Landung an der Decke, da es die Flügel sind, die die verschiedenen aerodynamischen Impulse erzeugen, die für erfolgreiche Manöver erforderlich sind.
Beobachtungen der Flügel der blauen Fliegen ergaben eine Reihe von Veränderungen zum Zeitpunkt des Manövers.
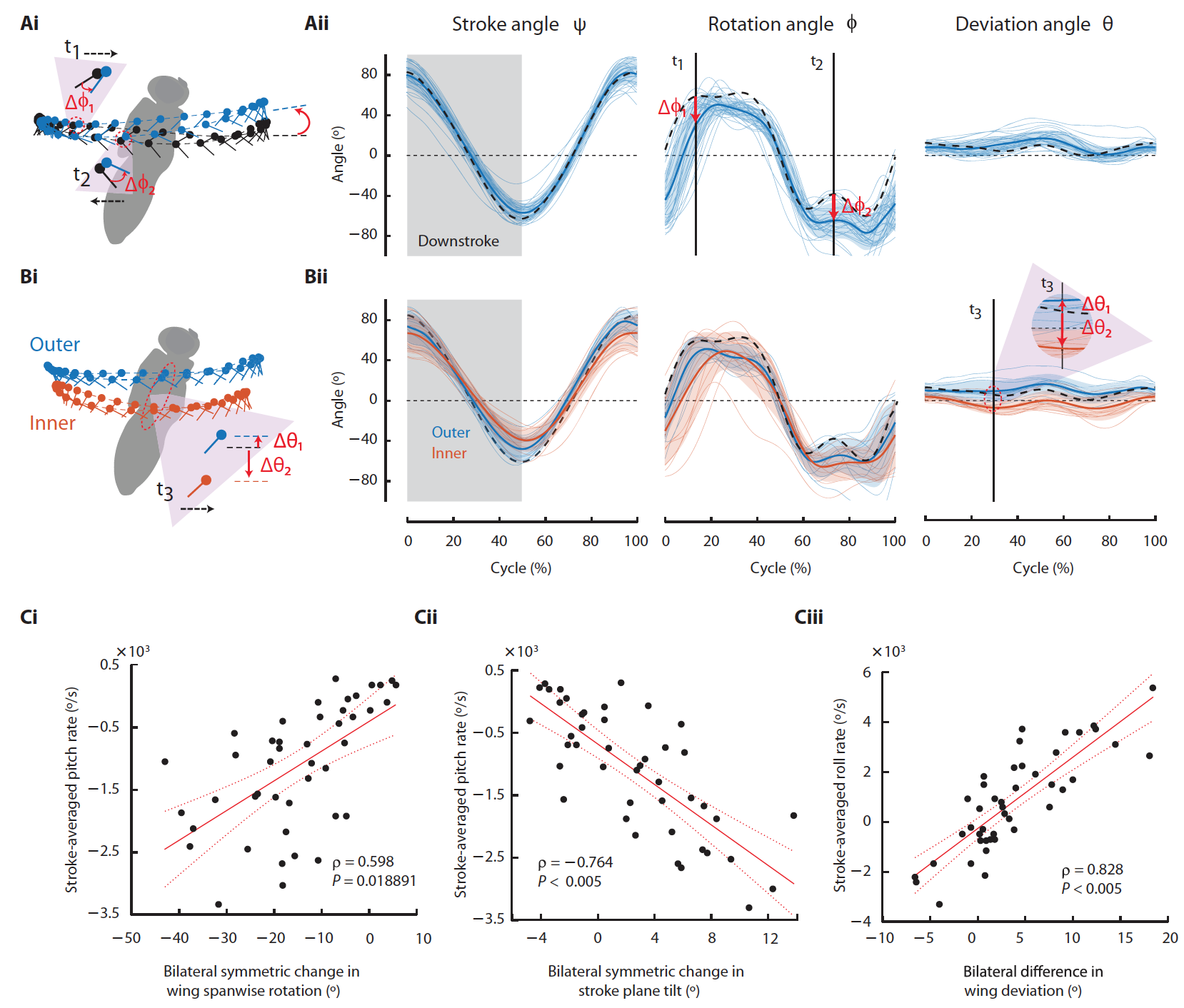 Bild Nr. 5
Bild Nr. 5Das erste, was entdeckt wurde, war eine bilaterale symmetrische Änderung der
Längsrotation des Flügels (
5A und
5Ci ) und bilaterale symmetrische Änderungen des Winkels der Ebene des Flügels (
5A und
5Cii ), die beide stark mit der
Nickfrequenz korrelierten. Es gab auch Änderungen in der Flügelneigung (
5B und
Ciii ), die stark mit der Rollgeschwindigkeit korrelierten. Darüber hinaus gab es auch Änderungen in der Amplitude des Schlagens und der Drehung des Mittelflügels, was zur Rolle beiträgt.
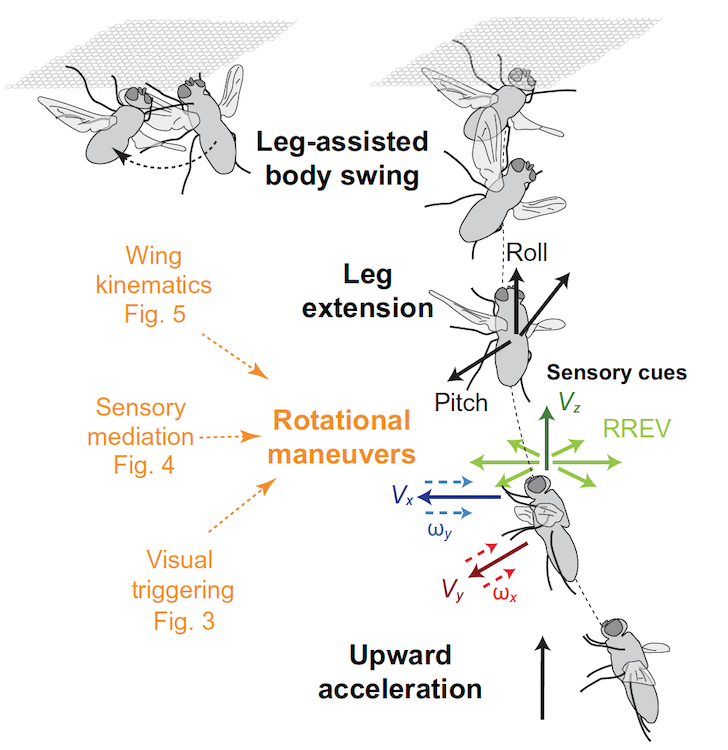 Bild Nr. 6Um die Nuancen der Studie genauer kennenzulernen, empfehle ich Ihnen, den Bericht von Wissenschaftlern und zusätzliche Materialien zu lesen.
Bild Nr. 6Um die Nuancen der Studie genauer kennenzulernen, empfehle ich Ihnen, den Bericht von Wissenschaftlern und zusätzliche Materialien zu lesen.Nachwort
, , ( ).
, RREV, , , .
, . .
. . , , , , . , , .
- , . , , , , , .
, , ! :)
, . ? ? Unterstützen Sie uns, indem Sie eine Bestellung
aufgeben oder Ihren Freunden empfehlen, einen
Rabatt von 30% für Habr-Benutzer auf einem einzigartigen analogen Einstiegsserver, den wir für Sie erfunden haben: Die ganze Wahrheit über VPS (KVM) E5-2650 v4 (6 Kerne) 10 GB DDR4 240 GB SSD 1 Gbit / s ab 20 $ oder wie teilt man den Server? ( RAID1 RAID10, 24 40GB DDR4).
Dell R730xd 2 mal günstiger? 2 Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 $199 ! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — $99! . c Dell R730xd 5-2650 v4 9000 ?