
In einer früheren Veröffentlichung haben wir darüber gesprochen, wie Busse und Protokolle in der industriellen Automatisierung funktionieren. Dieses Mal konzentrieren wir uns auf moderne Arbeitslösungen: Lassen Sie uns sehen, welche Protokolle in Systemen auf der ganzen Welt verwendet werden. Betrachten Sie die Technologie der deutschen Unternehmen Beckhoff und Siemens, des österreichischen B & R, des amerikanischen Rockwell Automation und des russischen Fastwel. Außerdem werden wir universelle Lösungen untersuchen, die nicht an einen bestimmten Hersteller gebunden sind, wie z. B. EtherCAT und CAN.
Am Ende des Artikels finden Sie eine Vergleichstabelle mit den Eigenschaften der Protokolle EtherCAT, POWERLINK, PROFINET, EtherNet / IP und ModbusTCP.
Wir haben die Protokolle PRP, HSR, OPC UA und andere nicht berücksichtigt Auf ihnen auf Habré gibt es bereits hervorragende Artikel unserer Kollegen, die sich mit der Entwicklung industrieller Automatisierungssysteme befassen. Zum Beispiel "Protokolle" nahtlose "Redundanz PRP und HSR" und "Gateways von industriellen Austauschprotokollen für Linux. Baue es selbst . "
Zunächst definieren wir die Terminologie: Industrial Ethernet = Industrial Network, Fieldbus = Field Bus. In der russischen Industrieautomation kommt es zu Verwirrung in Bezug auf Feldbusse und Industrienetzwerke auf niedriger Ebene. Oft werden diese Begriffe zu einem einzigen vagen Konzept der "unteren Ebene" kombiniert, das sowohl als Feldbus als auch als Bus der unteren Ebene bezeichnet wird, obwohl dies möglicherweise überhaupt kein Bus ist.
Warum so?Diese Verwirrung ist höchstwahrscheinlich auf die Tatsache zurückzuführen, dass in vielen modernen Steuerungen die Verbindung von E / A-Modulen häufig über die Rückwandplatine oder den physischen Bus implementiert wird. Das heißt, einige Buskontakte und Anschlüsse werden verwendet, um mehrere Module zu einer Einheit zu kombinieren. Solche Knoten können jedoch wiederum sowohl durch ein industrielles Netzwerk als auch durch einen Feldbus miteinander verbunden werden. In der westlichen Terminologie gibt es eine klare Trennung: Ein Netzwerk ist ein Netzwerk, ein Bus ist ein Bus. Ersteres wird als Industrial Ethernet bezeichnet, letzteres als Feldbus. Der Artikel schlägt vor, für diese Konzepte den Begriff „industrielles Netzwerk“ bzw. den Begriff „Feldbus“ zu verwenden.
EtherCAT Industrial Network Standard, entwickelt von Beckhoff
Das EtherCAT-Protokoll und das industrielle Netzwerk sind heute möglicherweise eine der schnellsten Datenübertragungsmethoden in Automatisierungssystemen. Das EtherCAT-Netzwerk wurde erfolgreich in verteilten Automatisierungssystemen eingesetzt, in denen die interagierenden Knoten über große Entfernungen verteilt sind.
Das EtherCAT-Protokoll verwendet Standard-Ethernet-Frames zum Übertragen seiner Telegramme. Daher bleibt die Kompatibilität mit Standard-Ethernet-Geräten erhalten, und der Datenempfang und die Datenübertragung können auf jedem Ethernet-Controller angeordnet werden, sofern die entsprechende Software verfügbar ist.
 Beckhoff-Controller mit einer Reihe von E / A-Modulen. Quelle: www.beckhoff.de
Beckhoff-Controller mit einer Reihe von E / A-Modulen. Quelle: www.beckhoff.deDie Protokollspezifikation ist offen und zugänglich, jedoch nur im Rahmen der Entwicklungsvereinigung - EtherCAT Technology Group.
So funktioniert EtherCAT (der Anblick ist faszinierend wie beim Zuma Inca-Spiel):
Der hohe Wechselkurs in diesem Protokoll - und wir können von Einheiten von Mikrosekunden sprechen - wird durch die Tatsache realisiert, dass die Entwickler den Austausch mit Telegrammen verweigerten, die direkt an ein bestimmtes Gerät gesendet wurden. Stattdessen wird ein Telegramm an das EtherCAT-Netzwerk gesendet, das gleichzeitig an alle Geräte adressiert ist. Jeder der untergeordneten Knoten zum Sammeln und Übertragen von Informationen (sie werden häufig als USO - ein Kommunikationsgerät mit einem Objekt bezeichnet) nimmt die für ihn bestimmten Daten im laufenden Betrieb auf und fügt sie ein in einem Telegramm die Daten, die er zum Austausch bereitstellt. Danach wird das Telegramm an den nächsten untergeordneten Knoten gesendet, wo dieselbe Operation stattfindet. Nach dem Übergeben des gesamten ODR wird das Telegramm an die Hauptsteuerung zurückgegeben, die auf der Grundlage der von den Slave-Geräten empfangenen Daten die Steuerlogik implementiert und wiederum mittels eines Telegramms mit den Slave-Knoten interagiert, die ein Steuersignal an das Gerät ausgeben.
Ein EtherCAT-Netzwerk kann eine beliebige Topologie haben, aber tatsächlich wird es immer ein Ring sein - aufgrund der Verwendung des Vollduplexmodus und zweier Ethernet-Anschlüsse. Somit wird das Telegramm immer nacheinander an jedes Gerät auf dem Bus übertragen.
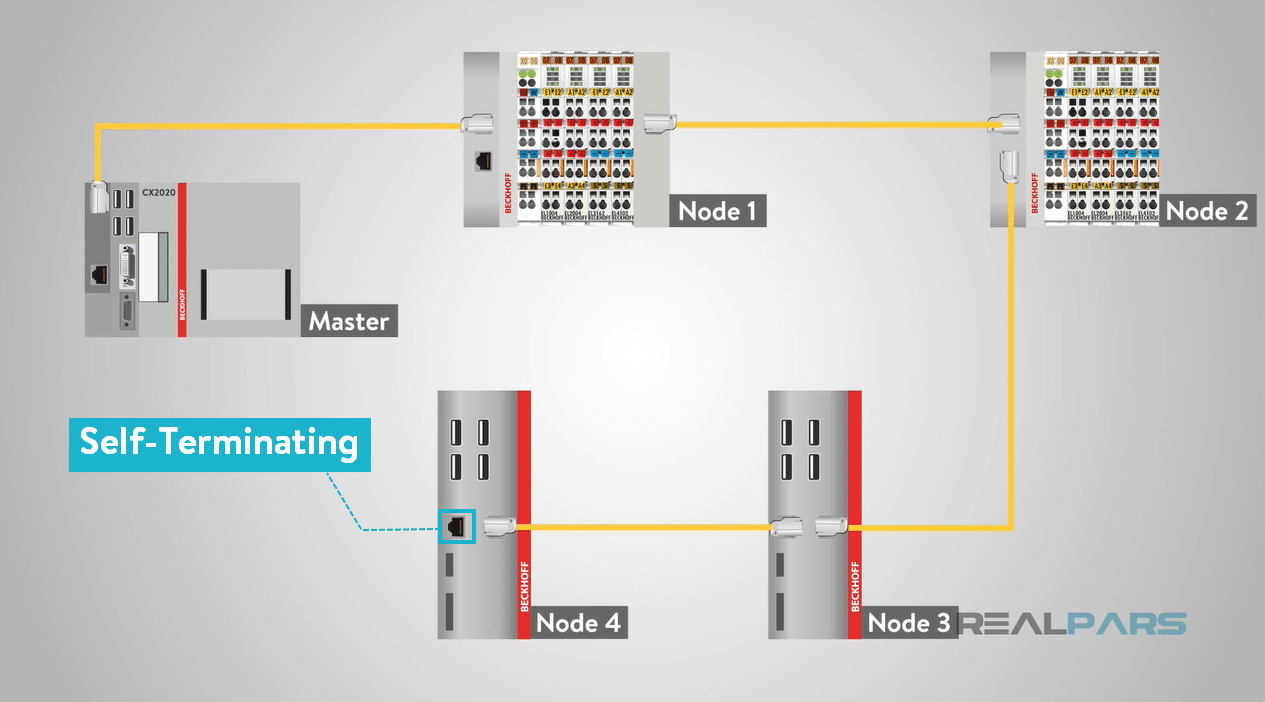 Schematische Darstellung eines Ethercat-Netzwerks mit mehreren Knoten. Quelle: realpars.com
Schematische Darstellung eines Ethercat-Netzwerks mit mehreren Knoten. Quelle: realpars.comDie EtherCAT-Spezifikation enthält übrigens keine Einschränkungen der physikalischen Schicht 100Base-TX, daher ist die Implementierung des Protokolls auf der Basis von Gigabit- und optischen Leitungen möglich.
Siemens Open Industry Networks und PROFIBUS / NET-Standards
Der deutsche Konzern Siemens ist seit langem für seine weltweit einsetzbaren speicherprogrammierbaren Steuerungen (SPS) bekannt.
Der Datenaustausch zwischen Knoten eines automatisierten Systems unter der Steuerung von Siemens-Geräten wird sowohl über einen Feldbus namens PROFIBUS als auch im industriellen Netzwerk PROFINET implementiert.
Der PROFIBUS-Bus verwendet ein spezielles zweiadriges Kabel mit DB-9-Anschlüssen. Bei Siemens ist es lila, aber in der Praxis haben wir andere getroffen :). Um mehrere Knoten zu verbinden, kann ein Anschluss zwei Kabel verbinden. Es hat auch einen Schalter für einen Anschlusswiderstand. Der Anschlusswiderstand muss an den Endgeräten des Netzwerks eingeschaltet sein. Daher wird berichtet, dass dies das erste oder letzte Gerät ist und danach nichts mehr, nur Dunkelheit und Leere (alle rs485 funktionieren auf diese Weise). Wenn Sie den Widerstand am Zwischenstecker einschalten, wird der folgende Abschnitt getrennt.
 PROFIBUS-Kabel mit Anschlüssen. Quelle: VIPA ControlsAmerica
PROFIBUS-Kabel mit Anschlüssen. Quelle: VIPA ControlsAmericaDas PROFINET-Netzwerk verwendet ein Analogon eines Twisted-Pair-Kabels, normalerweise mit RJ-45-Anschlüssen. Das Kabel ist grün lackiert. Wenn die PROFIBUS-Topologie ein Bus ist, kann die Topologie des PROFINET-Netzwerks alles sein: mindestens ein Ring, mindestens ein Stern, mindestens ein Baum, mindestens alle zusammen.
 Siemens-Controller mit angeschlossenem PROFINET-Kabel. Quelle: w3.siemens.com
Siemens-Controller mit angeschlossenem PROFINET-Kabel. Quelle: w3.siemens.comAuf dem PROFIBUS-Bus und im PROFINET-Netzwerk existieren mehrere Kommunikationsprotokolle.
Für PROFIBUS:
- PROFIBUS DP - Die Implementierung dieses Protokolls impliziert die Kommunikation mit Remote-Slaves. Im Fall von PROFINET entspricht das PROFINET IO-Protokoll diesem Protokoll.
- PROFIBUS PA - ist im Wesentlichen derselbe PROFIBUS DP, der nur für explosionsgeschützte Versionen der Daten- und Energieübertragung verwendet wird (analog zu PROFIBUS DP mit anderen physikalischen Eigenschaften). Für PROFINET existiert noch kein explosionsgeschütztes Protokoll in Analogie zu PROFIBUS.
- PROFIBUS FMS - Entwickelt für den Datenaustausch mit Systemen anderer Hersteller, die PROFIBUS DP nicht verwenden können. Das Äquivalent von PROFIBUS FMS im PROFINET-Netzwerk ist das PROFINET CBA-Protokoll.
Für PROFINET:
- PROFINET IO;
- PROFINET CBA.
Das PROFINET IO-Protokoll ist in mehrere Klassen unterteilt:
- PROFINET NRT (keine Echtzeit) - wird in Anwendungen verwendet, bei denen Zeitparameter nicht kritisch sind. Es verwendet Ethernet TCP / IP sowie UDP / IP.
- PROFINET RT (Echtzeit) - hier wird der Eingabe- / Ausgabedatenaustausch über Ethernet-Frames implementiert, die Diagnose- und Kommunikationsdaten werden jedoch weiterhin über UDP / IP übertragen.
- PROFINET IRT (isochrone Echtzeit) - Dieses Protokoll wurde speziell für Motion Control-Anwendungen entwickelt und umfasst die isochrone Phase der Datenübertragung.
Für die Implementierung des PROFINET IRT-Echtzeitprotokolls werden zwei Kommunikationskanäle für die Kommunikation mit Remote-Geräten zugewiesen: isochron und asynchron. Ein isochroner Kanal mit einer festen Zeitaustauschzykluslänge verwendet eine Taktsynchronisation und überträgt zeitkritische Daten, Telegramme der zweiten Ebene werden zur Übertragung verwendet. Die Übertragungsdauer im isochronen Kanal überschreitet 1 Millisekunde nicht.
Im asynchronen Kanal werden die sogenannten Echtzeitdaten übertragen, die ebenfalls über die MAC-Adresse adressiert werden. Zusätzlich werden bereits verschiedene Diagnose- und Zusatzinformationen über TCP / IP übertragen. Weder Echtzeitdaten noch andere Informationen können den isochronen Zyklus natürlich nicht unterbrechen.
Ein erweiterter Satz von PROFINET IO-Funktionen wird nicht für jedes industrielle Automatisierungssystem benötigt, daher wird dieses Protokoll für ein bestimmtes Projekt unter Berücksichtigung der Konformitätsklassen oder Konformitätsklassen skaliert: CC-A, CC-B, CC-CC. Mit Konformitätsklassen können Sie Feldgeräte und Amtsleitungskomponenten mit der minimal erforderlichen Funktionalität auswählen.
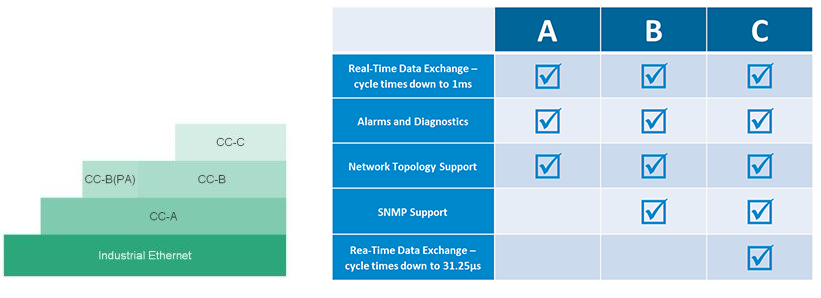 Quelle: PROFINET Universitätsunterricht
Quelle: PROFINET UniversitätsunterrichtDas zweite Kommunikationsprotokoll im PROFINET-Netzwerk - PROFINET CBA - dient zur Organisation der industriellen Kommunikation zwischen Geräten verschiedener Hersteller. Die Hauptproduktionseinheit in CBA-Systemen ist eine bestimmte Einheit, die als Komponente bezeichnet wird. Diese Komponente ist normalerweise eine Kombination aus den mechanischen, elektrischen und elektronischen Teilen des Geräts oder der Installation sowie der entsprechenden Anwendungssoftware. Für jede Komponente wird ein Softwaremodul ausgewählt, das eine vollständige Beschreibung der Schnittstelle dieser Komponente gemäß den Anforderungen des PROFINET-Standards enthält. Diese Softwaremodule werden dann zum Datenaustausch mit Geräten verwendet.
B & R Ethernet POWERLINK-Protokoll
Das Powerlink-Protokoll wurde Anfang der 2000er Jahre von der österreichischen Firma B & R entwickelt. Dies ist eine weitere Implementierung des Echtzeitprotokolls über Ethernet. Die Protokollspezifikation ist verfügbar und frei verbreitet.
Die Powerlink-Technologie nutzt den Mechanismus der sogenannten gemischten Abfrage, bei der die gesamte Interaktion zwischen Geräten in mehrere Phasen unterteilt ist. Besonders kritische Daten werden in der isochronen Austauschphase übertragen, für die die erforderliche Antwortzeit konfiguriert ist, der Rest der Daten wird so weit wie möglich in der asynchronen Phase übertragen.
 B & R-Controller mit einer Reihe von E / A-Modulen. Quelle: br-automation.com
B & R-Controller mit einer Reihe von E / A-Modulen. Quelle: br-automation.comUrsprünglich wurde das Protokoll auf der physischen 100Base-TX-Schicht implementiert, später wurde jedoch eine Gigabit-Implementierung entwickelt.
Das Powerlink-Protokoll verwendet einen Austauschplanungsmechanismus. Ein bestimmtes Token oder eine bestimmte Kontrollnachricht wird an das Netzwerk gesendet. Mithilfe dieser Nachricht wird bestimmt, welches der Geräte derzeit die Berechtigung zum Datenaustausch hat. Es kann immer nur ein Gerät auf die Vermittlungsstelle zugreifen.
 Schematische Darstellung eines Ethernet POWERLINK-Netzwerks mit mehreren Knoten.
Schematische Darstellung eines Ethernet POWERLINK-Netzwerks mit mehreren Knoten.In der isochronen Phase sendet der Polling-Controller nacheinander eine Anforderung an jeden Knoten, von dem kritische Daten empfangen werden müssen.
Die isochrone Phase wird, wie bereits erwähnt, mit einer einstellbaren Zykluszeit durchgeführt. In der asynchronen Phase des Austauschs wird der IP-Protokollstapel verwendet. Der Controller fordert unkritische Daten von allen Knoten an, die eine Antwort senden, wenn sie Zugriff auf die Übertragung zum Netzwerk erhalten. Das Zeitverhältnis zwischen der isochronen und der asynchronen Phase kann manuell eingestellt werden.
Rockwell Automation Ethernet / IP-Protokoll
EtherNet / IP wurde unter aktiver Beteiligung von Rockwell Automation im Jahr 2000 entwickelt. Es verwendet den TCP- und UDP-IP-Stack und erweitert ihn für die industrielle Automatisierung. Der zweite Teil des Namens bedeutet entgegen der landläufigen Meinung nicht das Internetprotokoll, sondern das Industrieprotokoll. UDP IP verwendet den CIP-Kommunikationsstapel (Common Interface Protocol), der auch in ControlNet / DeviceNet-Netzwerken verwendet und über TCP / IP implementiert wird.
Die EtherNet / IP-Spezifikation ist öffentlich und kostenlos. Die Ethernet / IP-Netzwerktopologie kann beliebig sein und einen Ring, einen Stern, einen Baum oder einen Bus enthalten.
Zusätzlich zu den Standardfunktionen der Protokolle HTTP, FTP, SMTP, EtherNet / IP wird die Übertragung zeitkritischer Daten zwischen dem Polling Controller und den Ein- / Ausgabegeräten implementiert. Die Übertragung zeitkritischer Daten erfolgt über TCP-Pakete, und die zeitkritische Übermittlung zyklischer Steuerdaten erfolgt über UDP.
Für die Zeitsynchronisation in verteilten Systemen verwendet EtherNet / IP das CIPsync-Protokoll, eine Erweiterung des CIP-Kommunikationsprotokolls.
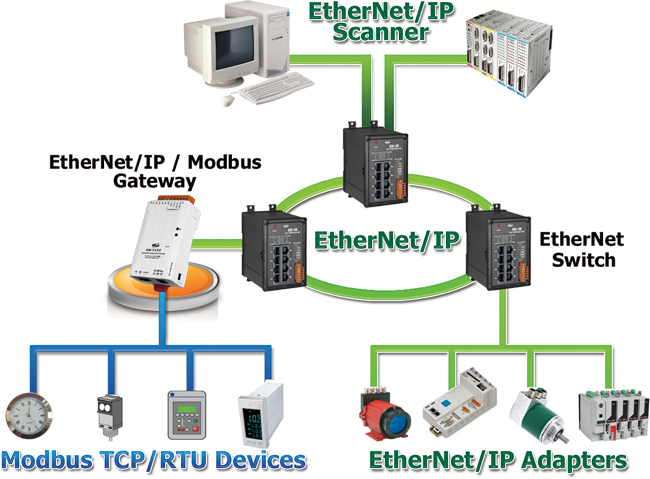 Schematische Darstellung eines Ethernet / IP-Netzwerks mit mehreren Knoten und Modbus-Geräten. Quelle: www.icpdas.com.tw
Schematische Darstellung eines Ethernet / IP-Netzwerks mit mehreren Knoten und Modbus-Geräten. Quelle: www.icpdas.com.twUm die Konfiguration des EtherNet / IP-Netzwerks zu vereinfachen, werden die meisten Standardautomatisierungsgeräte mit vordefinierten Konfigurationsdateien geliefert.
Implementierung des Fastwel FBUS-Protokolls
Sie überlegten lange, ob sie das russische Unternehmen Fastwel mit seiner inländischen Implementierung des Industrieprotokolls FBUS in diese Liste aufnehmen sollten, beschlossen dann aber, ein paar Absätze zu schreiben, um die Realitäten der Importsubstitution besser zu verstehen.
Es gibt zwei physische Implementierungen von FBUS. Einer davon ist ein Bus, in dem das FBUS-Protokoll über dem RS485-Standard ausgeführt wird. Zusätzlich gibt es eine Implementierung von FBUS in einem industriellen Ethernet-Netzwerk.
Es ist schwierig, FBUS als Hochgeschwindigkeitsprotokoll zu bezeichnen. Die Reaktionszeit hängt stark von der Anzahl der Ein- / Ausgabemodule am Bus und von den Austauschparametern ab. Normalerweise variiert sie zwischen 0,5 und 10 Millisekunden. Ein FBUS-Slave kann nur 64 E / A-Module enthalten. Bei einem Feldbus darf die Kabellänge 1 Meter nicht überschreiten, daher handelt es sich nicht um verteilte Systeme. Vielmehr geht es, aber nur bei Verwendung eines industriellen FBUS-Netzwerks über TCP / IP, was eine mehrmalige Verlängerung der Abrufzeit bedeutet. Bus-Extender können zum Anschließen der Module verwendet werden, wodurch die Module bequem im Automatisierungsschrank platziert werden können.
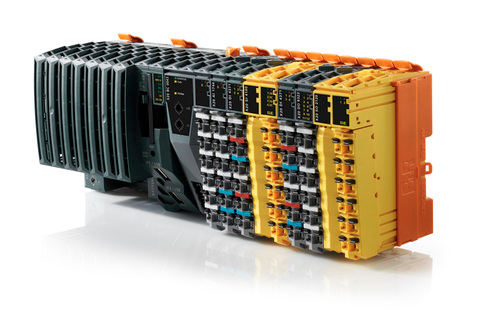
 Fastwel-Controller mit angeschlossenen E / A-Modulen. Quelle: Steuerungstechnik Russland
Fastwel-Controller mit angeschlossenen E / A-Modulen. Quelle: Steuerungstechnik Russland
Insgesamt: Wie all dies in der Praxis in ACS TP verwendet wird
Natürlich ist die Artenvielfalt moderner industrieller Datenübertragungsprotokolle viel größer als in diesem Artikel beschrieben. Einige sind an einen bestimmten Hersteller gebunden, andere sind im Gegenteil universell. Bei der Entwicklung automatisierter Prozessleitsysteme (APCS) wählt der Ingenieur die optimalen Protokolle unter Berücksichtigung spezifischer Aufgaben und Einschränkungen (Technik und Budget) aus.
Wenn wir über die Verbreitung eines bestimmten Austauschprotokolls sprechen, können wir ein Diagramm von HMS Networks AB geben , das die Marktanteile verschiedener Austauschtechnologien in industriellen Netzwerken veranschaulicht.
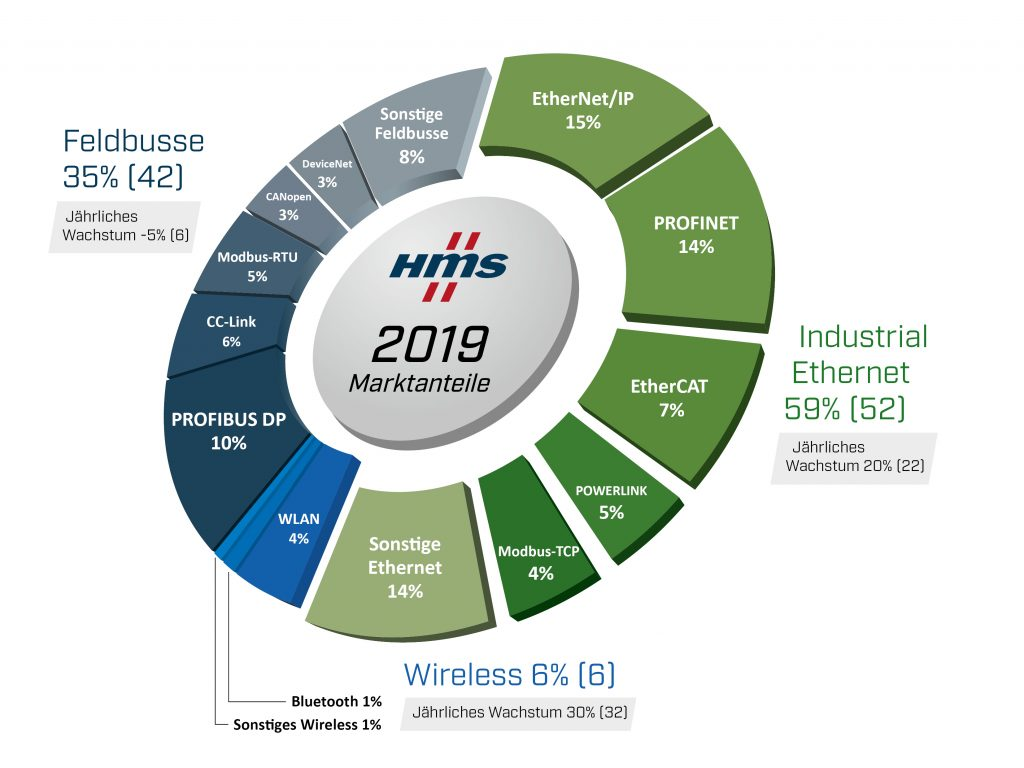 Quelle: HMS Networks AB
Quelle: HMS Networks ABWie Sie im Diagramm sehen können, nehmen PRONET und PROFIBUS von Siemens eine führende Position ein.
Interessanterweise
machten PROFINET- und Ethernet / IP-Protokolle vor 6 Jahren
60% des Marktes aus .
Die folgende Tabelle fasst die beschriebenen Austauschprotokolle zusammen. Einige Parameter, z. B. die Leistung, werden abstrakt ausgedrückt: hoch / niedrig. Numerische Entsprechungen finden Sie in Artikeln zur Leistungsanalyse.
Die Anwendungen der beschriebenen Kommunikationsprotokolle, Feldbusse und Industrienetzwerke sind sehr vielfältig. Ausgehend von der Chemie- und Automobilindustrie bis hin zu Luft- und Raumfahrttechnologien und Elektronik. Hochgeschwindigkeitskommunikationsprotokolle sind in Echtzeit-Ortungssystemen für verschiedene Geräte und in der Robotik gefragt.
Mit welchen Protokollen haben Sie gearbeitet und wo haben Sie sie verwendet? Teilen Sie Ihre Erfahrungen in den Kommentaren. :)