Hallo allerseits!
In diesem Beitrag möchte ich auf die Fortsetzung des Entwurfs der Maschine zur Durchführung physikalischer und mechanischer Tests zurückkommen.
Lassen Sie mich daran erinnern (
erster Teil ), dass diese Maschine (Prototyp) ein Cantilever-Typ ist und Zug- und Drucktests in zwei Zonen durchführen kann - oben und unten.
Neben dem ersten Artikel über Kinematik und Montage wurden dem Design geprägte Griffe mit Wellenschwämmen hinzugefügt, die auf einem 3D-Drucker gedruckt wurden. Das Getriebe des Autofensterhebers fungierte als Antrieb. Da es sich um das Triebwerk handelt, ist dieser Getriebemotor vor allem bei niedrigen Drehzahlen eher schwach. Vielleicht werde ich in den folgenden Modifikationen des Projekts einen Getriebemotor mit einem Schrittmotor installieren.
Jetzt werde ich über Software sprechen. Ich muss sofort sagen, dass der Programmierer von mir so lala ist, nicht alles so geworden ist, wie ich es wollte, das Programm ist immer noch sehr roh, obwohl es funktioniert.
Das Programm wurde in der Delphi-Programmierumgebung geschrieben. Ich würde das Design bereits in dieser Phase ändern, da es unangenehme Momente gibt, aber jetzt werde ich dies nicht tun, ich möchte zuerst den Hauptalgorithmus erarbeiten.
Die Elektronik basiert auf einem Arduino-Controller und zwei zusätzlichen Modulen. Die darin enthaltene Firmware wird ganz einfach hochgeladen, nämlich das Sammeln von Daten von zwei Sensoren, das Empfangen und Senden von Daten über die serielle Schnittstelle und die Steuerung des Getriebemotors.
Um mit einer seriellen Schnittstelle zu arbeiten, habe ich die ComPort-Bibliothek installiert. Daten vom Arduino wurden als Zeichenfolge übertragen: S Kraftsensor / Wegsensor E (S123456 / 123E).
Das Programm ist ein einziges Fenster mit Abmessungen von 800x600 Pixel (um die Skalierung nicht zu stören). Es enthält mehrere Lesezeichen: Eine neue Reihe von Tests, Test, Einstellungen.
Ich beginne mit dem letzten Lesezeichen - Einstellungen.
Alle über den Port empfangenen Daten werden im Terminal angezeigt. Daraus ziehe ich die Zeichenfolge heraus, überprüfe sie auf Übereinstimmung und trenne die Werte durch Variablen.

Variablen werden mit Koeffizienten multipliziert, um den tatsächlichen Massen- und Verschiebungswerten zu entsprechen.
Wir erhalten alle diese Koeffizienten in der gleichen Registerkarte in den Feldern, die Kraft, Verschiebung oder Geschwindigkeit entsprechen.
Der Geschwindigkeitsberechnungskoeffizient arbeitet nach dem umgekehrten Prinzip und übersetzt den eingestellten (realen) Wert der Geschwindigkeit in den Wert, den Arduino von 0 bis 255 versteht.
Nach dem Ausfüllen aller Felder und der Berechnung der Koeffizienten können die Daten gespeichert werden. Sie werden in der Exel-Datei gespeichert, da es bequem ist, sie anzuzeigen und bei Bedarf zu korrigieren.
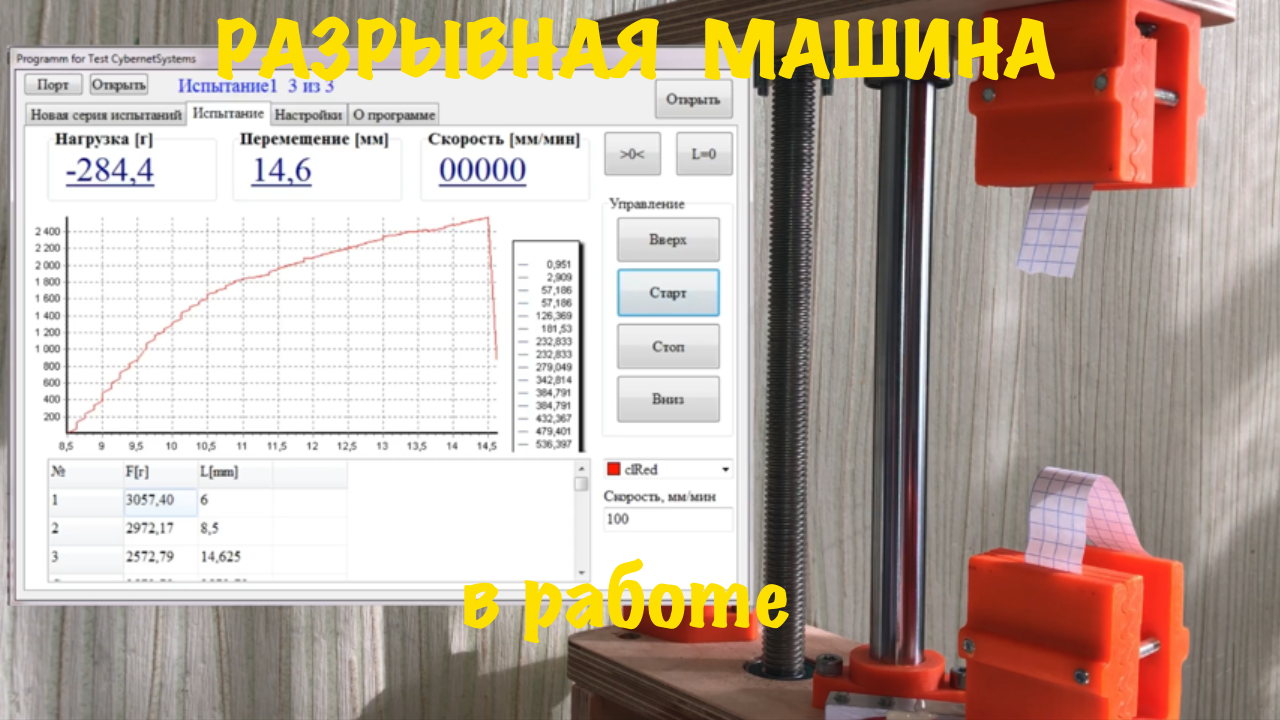
Gehen wir zur Seite - Test.
Dies ist die Hauptseite, wenn Sie mit dem Gerät arbeiten. Der obere Teil zeigt Daten von den Sensoren an. Die Maschinensteuertasten befinden sich auf der rechten Seite: Bewegen Sie das bewegliche Joch „Auf“, „Ab“ und „Stopp“. Mit der Schaltfläche "Start" wird der Test mit der Geschwindigkeit und Richtung gestartet, die bei der Erstellung des Tests angegeben wurden, mehr dazu weiter unten.
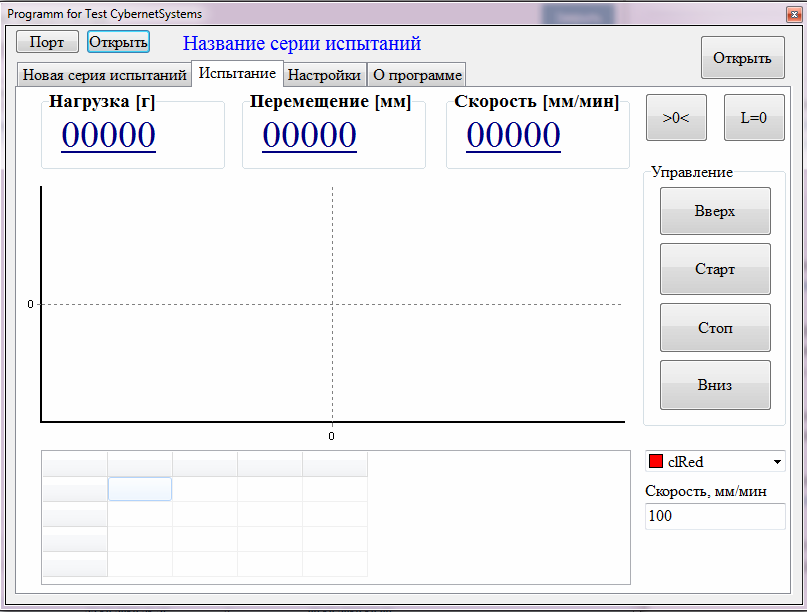
Im zentralen Teil befindet sich ein Ausgabebereich des Testplans, unter dem sich eine Übersichtstabelle der Ergebnisse einer Reihe von Tests befindet. Die Tabelle wird nach dem Test (Zerstörung der Probe) automatisch mit den Maximalwerten für Kraft und Verschiebung gefüllt.
Um eine neue Testreihe zu starten, gehen wir zur ersten Registerkarte.
Es muss den Namen der Testreihe, die Anzahl der Tests und die Geschwindigkeit angeben, mit der sich der Strahl während des Tests bewegt. Normalerweise beträgt sie für Tests nach GOST 12 mm / min, in meinem Fall ist sie jedoch etwas höher, da der Getriebemotor bei niedrigen Drehzahlen nicht genügend Leistung hat.

Als nächstes müssen Sie die Art des Tests auswählen: Kompression, Spannung oder Radfahren; sowie das Kriterium, nach dem die Maschine am Ende des Tests automatisch stoppt
Es kann mehrere solcher Kriterien geben - einen Stopp beim Erreichen einer bestimmten Last oder Verschiebung und einen Lastabfall, wenn der Prüfling zerstört wird.
Letzteres ist vorzuziehen, da Anschläge bei nichtlinear ansteigender Last eingestellt werden können.
Das Kriterium für den Lastabfall beim Anhalten ergibt sich aus dem Lastabfall in Prozent für eine bestimmte Zeit.
Nachdem Sie alle erforderlichen Parameter für die Tests eingegeben haben, klicken Sie auf die Schaltfläche "Start" und wechseln Sie zur Seite "Test".
Wir setzen die Probe so weit wie möglich koaxial in die Griffe ein, damit der Test korrekt besteht.
Im Programm setzen wir die Belastungs- und Verschiebungswerte zurück, so dass das Gewicht der Probe und die Vorspannung nach dem Einspannen der Greifer nicht berücksichtigt werden.
Durch Drücken der Taste „Start“ wird die bewegliche Traverse in Bewegung gesetzt, und auf dem Bildschirm wird ein Diagramm gezeichnet, das zeigt, wie sich die Last nach oben schleicht. Wenn die physikalische Grenze erreicht ist, wird die Probe zerstört und die Maschine stoppt. In der Übersichtstabelle unter dem Diagramm werden die Werte der maximalen Belastung und Verformung (Verschiebung) angezeigt. Dann können Sie mit dem nächsten Test in der Reihe fortfahren.
Am Ende des letzten Tests werden die Durchschnittswerte der Last und des Versatzes in der Übersichtstabelle angezeigt.
Jede Testreihe speichert Testparameter und Array-Daten in einer Excel-Datei. Dies ist praktisch für die spätere Analyse in anderen Programmen.
In Zukunft plane ich, das Programm zu verbessern und den Antrieb durch einen Schrittmotor mit Getriebe zu ersetzen, und dann wird es zu sehen sein ...