Im Rahmen des Skolkovo Robotics & AI-Forums veranstaltete Moskau am 16. April 2019 das erste Treffen in Russland über das Robot Operating System, ein weltweit verbreitetes Software-Framework, das die grundlegenden Algorithmen für den Bau komplexer Roboter implementiert. Die Veranstaltung gab der Entwicklung aller Teams einen so starken Impuls. Wir stürzten uns in das, was wir am meisten lieben - Entwicklung! Daher haben wir erst jetzt Zeit gefunden, die von den Rednern zur Veröffentlichung übermittelten einzigartigen Materialien unseres Treffens zu konsolidieren.
Unter den Besuchern des größten Robotikforums in Russland befanden sich mehr als 150 Ingenieure, die entweder bereits ROS einsetzen oder nur vorhaben, es in ihren Projekten einzusetzen. Dies ist ein gutes Ergebnis für das erste Treffen einer kleinen Gemeinschaft russischer ROS-Entwickler. Wir sind bestrebt, Teil der globalen Bewegung zu werden - und Hunderte von Teilnehmern treffen sich bereits zu ähnlichen Veranstaltungen im Ausland.
Das zweite russische ROS Meetup findet am 30. November 2019 statt .
Nochmals vielen Dank an alle, die gekommen sind und sich intensiv mit Berichten und kniffligen Fragen beschäftigt haben. All dies hat gezeigt, dass die Gemeinde großes Interesse an der Entwicklung von ROS hat und dass regelmäßige Arbeit erforderlich ist, um solche Treffen fortzusetzen. Wir wachsen, wenn wir Best Practices austauschen und eines der weltweit gebräuchlichsten Roboterentwicklungstools verbessern - das Robot Operating System.
Unsere Referenten waren Praxisentwickler mit Themen aus ihrer realen Erfahrung. Daher spiegeln die in dieser Veröffentlichung vorgestellten Materialien die Möglichkeiten des Einsatzes von ROS in bestehenden und laufenden Projekten wider.
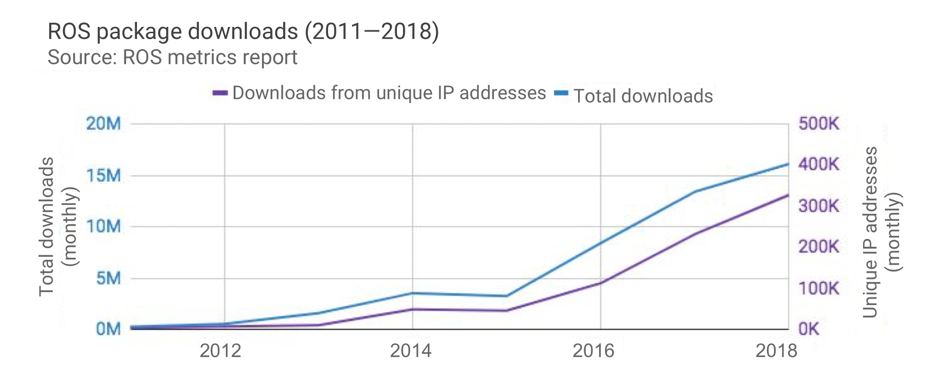
Die globale ROS-Community ist derzeit die größte und offenste Roboter-Community der Welt. Die Anzahl der ROS-Downloads hat sich seit 2014 fast versechsfacht! Dies ist natürlich das wichtigste Werkzeug für diejenigen, die Roboter herstellen. Deshalb unterstützen wir im Sberbank Robotics Laboratory alle, die ROS-Werte mit uns teilen und Erfahrungen austauschen möchten.
Wenn Sie neue Algorithmen für Roboter entwickeln, ist das Schreiben eines Pakets für ROS eine gute Lösung, um diese in vorhandene Roboter zu integrieren und der Welt zu demonstrieren.
Wenn Sie gerade erst Ihre Reise in die Robotik beginnen, hilft Ihnen das Erlernen von ROS, moderne Technologien zu beherrschen und sich in die Community zu integrieren.
Das erste ROS Meetup war voller interessanter Berichte. Da jedoch nicht jeder an der Veranstaltung in Moskau teilnehmen konnte, veröffentlichen wir für Sie Videos und Präsentationsfolien:
Einführung in ROS. Ideologie und aktueller Status.Alexey Burkov, Sberbank Robotics Laboratory.Der Bericht befasst sich mit dem Erscheinungsbild von ROS, seinen Konzepten und den Personen, die es entwickelt haben, sowie mit dem aktuellen Stand der Rahmenbedingungen in der globalen Gemeinschaft.
Link zu Präsentationsfolien.
Erfahrung im Einsatz von ROS in der Wettbewerbsrobotik am Beispiel von Eurobot.Alexey Postnikov, Sberbank Robotics Laboratory.In dem Bericht wird das Roboterlokalisierungssystem mit Aruco-Markern unter Verwendung von ROS erörtert.
Link zu Präsentationsfolien.
Übrigens, Sie können an Eurobot-Wettbewerben teilnehmen, indem Sie sich dem SetUp-Team anschließen, das vom Sberbank Robotics Laboratory unterstützt wird. Dies ist eine großartige Möglichkeit, Robotik und ROS zu erlernen und Ihre Fähigkeiten in die Praxis umzusetzen. Um teilzunehmen, schreiben Sie einen Brief an robotics@sberbank.ru.SLAM- und Laser-Lidar-Navigation.Alexey Burkov, Sberbank Robotics Laboratory.Die Geschichte, wie wir mithilfe von ROS einen Kurierroboter mithilfe von SLAM und einem Pfadplaner navigierten, umfasste die folgenden Themen:
- Erstellen einer Raumkarte und Roboterlokalisierung mithilfe des Gmapping-Algorithmus.
- Lokalisierung des Roboters auf der Karte durch den AMCL-Algorithmus.
- Roboternavigation über MoveBase und DWA.
Link zu Präsentationsfolien.
Sie können ein Praktikum im Sberbank Robotics Laboratory zu den Themen Kurier und ROS absolvieren. Schreiben Sie hierzu einen Brief an robotics@sberbank.ru.Ein Roboter-Bahnplaner, der eine vorgegebene Karte und dynamische Hindernisse am Beispiel von Eurobot berücksichtigt.Alexander Gamayunov, Sberbank Robotics Laboratory.Die Geschichte der Erstellung eines eigenen Routenplaner basierend auf A *, T *, Costmap Server, Global Planner, STM32-Treiber und dem Ramer-Douglas-Pecker-Algorithmus für die Teilnahme an internationalen Eurobot-Wettbewerben.
Link zu Präsentationsfolien.
Erfahrung mit dem Einsatz von ROS im Steuerungssystem eines autonomen unbewohnten Unterwasserfahrzeugs „Cousteau 2“Timur Akhtyamov, UCM Hydronautics.Unterwasserfahrzeugsimulation. Verwendung von Zustandsautomaten SMACH. ROS-Wrapper-Serie. Der Auslöser für QR-Codes. Roslaunch API zum Starten und Stoppen von Startdateien aus Python-Code. Autostart-Knoten beim Starten des Betriebssystems.
Link zu Präsentationsfolien.
BelAZ bei ROS und wir bei der VIST Group entwickeln Mining-Lösungen.Elizaveta Shpiev, VIST-Gruppe.Die Geschichte, wie die VIST-Gruppe ROS einsetzt, um eine intelligente Karriere zu schaffen.
Link zu Präsentationsfolien.
Das Testen von Code in ROS ist, wie man ein unbemanntes Auto baut und nichts kaputt macht.Oleg Shipitko, Visillect.Geschichte der Verwendung von Google Test (C ++), Unittest (Python) und Rostest zum Testen in ROS.
Link zu Präsentationsfolien.
Computer Vision in Robotern ist die Erfassung von Dingen durch einen Manipulator anhand von Daten einer RGBD-Kamera.Alexander Syomochkin, Sberbank Robotics Laboratory.Informationen zur Verwendung der RGBD-Kamera zum Erfassen von Objekten mit einem Roboter und einem Manipulator.
Link zu Präsentationsfolien.
Die Vereinheitlichung der weltweit einheitlichen ROS-Entwicklung.Konstantin Konogorsky, VIST-Fraktion.Die Fortsetzung der Geschichte der intellektuellen Karriere der VIST Group oder wie man das Untrennbare verbindet.
Link zu Präsentationsfolien.
ROS Docker Startet ein virtuelles ROS-Image auf einem Linux-Computer.Alexander Syomochkin, Sberbank Robotics Laboratory.Bericht über die Verwendung von Docker zum Erstellen und Ausführen eines virtuellen ROS-Images unter Linux.
Link zu Präsentationsfolien.
Welche Geräte hören und worüber sie sprechen.Alexander Menshikov, Sberbank Robotics Laboratory.Verwenden von ROS zum Erstellen von Sprachkommunikationsdiensten.
Link zu Präsentationsfolien.
Das vergangene ROS-Treffen gab den Teilnehmern viele positive Emotionen und interessante Berichte über den Einsatz von ROS in der modernen Robotik in Russland, und wir hoffen, die russische ROS-Community mit Ihrer Hilfe weiterzuentwickeln. Deshalb laden wir alle ein, beim nächsten ROS-Treffen am 30. November 2019 in Moskau einen Vortrag zu halten.
forms.gle/G3ggYcvFLfuJw1ur6Zusätzlich zu ROS Meetup führen wir auch ROS-Praktika im Sberbank Robotics Laboratory für unsere Projekte durch. Weitere Informationen finden Sie unter dem
Link .
Wenn Sie mehr über unsere Arbeit oder über die Entwicklungsbereiche der modernen Robotik erfahren möchten, empfehlen wir Ihnen, den jährlichen
analytischen Rückblick auf den globalen Robotermarkt sorgfältig zu lesen.
Es scheint uns, dass die ersten Erfahrungen mit dem Sammeln der Community richtig und positiv waren - wir werden dies fortsetzen. Und das
nächste ROS-Treffen ist für den 30. November 2019 geplant !
Sie können als Zuhörer teilnehmen, indem Sie eine
Bewerbung ausfüllen und auf die Bestätigung Ihrer Teilnahme an der Mail warten.
