Grüße, meine Lieben!
„Hydroakustischer Hydrophonschnitt“ ©
Gegenüber unseren vorherigen Artikeln hat sich die Situation nicht grundlegend geändert: Wir haben den größten Teil des weltweiten Ozeanteichs noch nicht erkundet, was bedeutet, dass wir den Druck erhöhen müssen.
Also stärke ich, wie ich kann.
Heute werde ich ausführlich und „auf den Fingern“ über verschiedene Arten von Unterwassernavigationssystemen sprechen, je nach der festgestellten falschen Klassifizierung, was sie sind, welche Vor- und Nachteile sie im Allgemeinen haben, in welchem Fall wo sie laufen müssen, was sie drücken müssen und wo sie abbiegen müssen.
Achtung: Spuren von Matan können im Artikel vorhanden sein!
Wenn das ruhige Wasser deiner Seele dieses Signal aufwirbelt, willkommen bei kat!
Bei
[1] akustischen Positionierungssystemen wird deren Typ immer als USBL, LBL, SBL angegeben. "BL" bedeutet hier Basislinie, d. H. Grundlinie. Hier schlage ich vor und beginne.
Was ist die Grundlinie?
Die Grundlinie wird durch zwei Referenzpunkte gebildet, deren relative Position zu einem bestimmten Zeitpunkt bekannt ist. Das erste Bild zeigt, wie diese Referenzpunkte zusammen mit dem gewünschten die Menge der räumlichen Dreiecke bestimmen (
), dessen Grundlage die Basislinie ist (
)
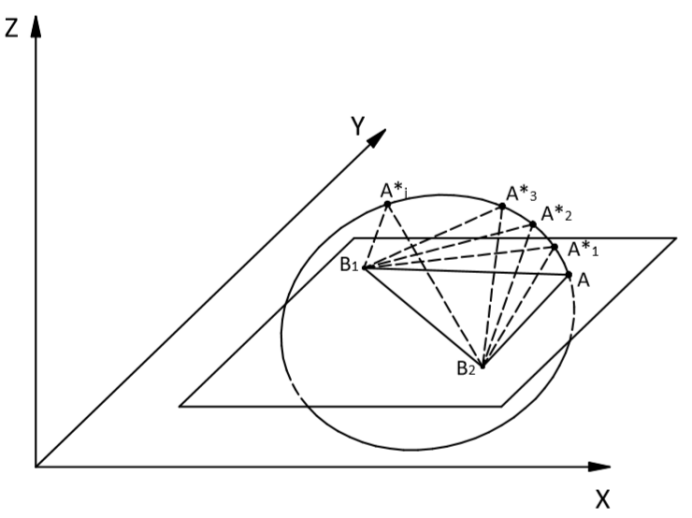 Die Grundlinie definiert den gewünschten Punkt auf dem Kreis.
Die Grundlinie definiert den gewünschten Punkt auf dem Kreis.Das Dreieck ist definiert durch:
- oder auf der Basis und zwei Bereichen, gemessen von beiden Referenzpunkten bis zum gewünschten, in diesem Fall sprechen wir von Trilateration;
- oder an der Basis und zwei Ecken, was Triangulation genannt wird.
Lyrischer ExkursWährend ich einen Artikel schrieb, dachte ich darüber nach, wie ich überhaupt dazu gekommen bin.
Ich erinnerte mich, dass ich als Kind einen Film gesehen hatte, in dem in der postapokalyptischen Welt Menschen Drachen jagten (was die Apokalypse verursachte), für die sie ihren Standort in der Luft berechneten, „Leuchtfeuer“ auf den Boden legten, und das habe ich seitdem klar gelernt dass für ein vollständiges Bild der Leuchttürme drei benötigt. Das Wort "Triangulation" ist fest im jugendlichen Gehirn verwurzelt. Ich erinnere mich, was ich damals dachte: Wie cool wäre es, Entwickler solcher Dinge zu sein.
Eigentlich bin ich hier!
Die Definition eines Dreiecks bedeutet die Bestimmung der Koordinaten des gewünschten Punktes.
Die Verwendung von Dreiecken zur Standortbestimmung stammt aus der Tiefe von Jahrhunderten, und die ersten Hinweise stammen bereits aus den Werken von
Thales [2] und
Euklid [3] .
Eine Grundlinie ergibt viele Dreiecke, deren Eckpunkte auf einem Kreis liegen. Und um die Position des gewünschten Punktes im n-dimensionalen Raum zu bestimmen, werden n + 1 Basislinien benötigt. Die Anzahl der erforderlichen Basislinien kann auf n reduziert werden, wenn eine der Koordinaten des gewünschten Punkts bekannt ist, beispielsweise die Tiefe (oder
Flughöhe des Drachen ), die häufig aus der direkten Messung bekannt ist.
Die obige Definition der Grundlinie bezieht sich normalerweise auf die Methoden der Triangulation und Trilateration, kann jedoch auch auf die Methode der Multilateration ausgedehnt werden [4].
In diesem Fall sind die Winkel und Entfernungen zum gewünschten Punkt unbekannt, aber der Unterschied zwischen diesen ist bekannt (zum Beispiel ist der Zeitpunkt der Aussendung des Signals durch das gewünschte Objekt unbekannt, aber die Zeitpunkte seines Eintreffens an beiden Bezugspunkten sind bekannt und werden durch synchronisierte Uhren gemessen, d. H. Die Verzögerung zwischen dem Eintreffen des Signals bei Bezugspunkte).
Die Signalankunftszeit multipliziert mit der Signalausbreitungsgeschwindigkeit wird üblicherweise als Pseudobereich bezeichnet.
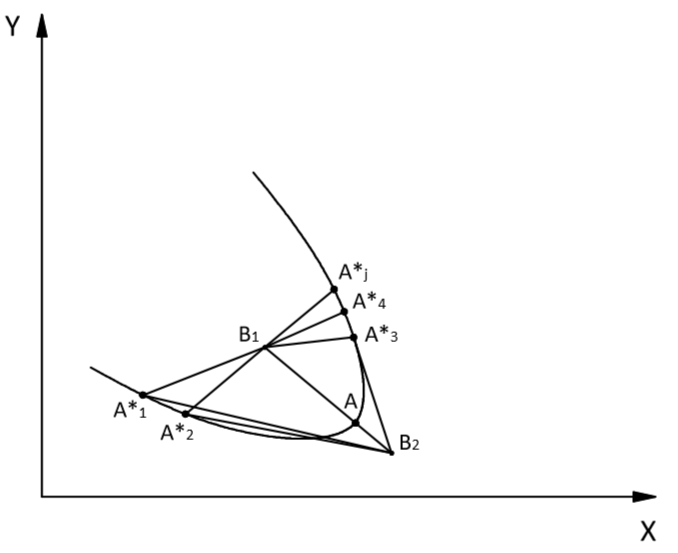 Die Grundlinie für die Multilateration bestimmt den gewünschten Punkt auf der Hyperbel
Die Grundlinie für die Multilateration bestimmt den gewünschten Punkt auf der HyperbelAus dem obigen Bild ist leicht ersichtlich, dass auf diese Weise eine unendliche Anzahl von Dreiecken definiert werden kann (
) deren Eckpunkte, die die Position des gewünschten Punktes darstellen, auf der Hyperbel liegen. In diesem Fall sind die Ankerpunkte die Brennpunkte der Hyperbel.
Hier wird wie bei der Triangulation die Position des gewünschten Punktes vollständig durch n + 1 Grundlinien für den n-dimensionalen Raum bestimmt.
Schlechtes Wort für Exportkontrollen
Tatsache ist, dass es je nach Lage der Koordinaten zwei Klassen von Systemen gibt:
- Tatsächlich Navigation (direkt Navigationssysteme genannt), bei der die Koordinaten auf dem Objekt selbst generiert werden (z. B. in GPS).
- Trackingsysteme (Überwachungssysteme), wenn sich zum Beispiel eine Art Leuchtfeuer auf dem Objekt befindet und wir es tragen.
Für die Exportkontrolle ist dieses Wort also sehr schlecht und ungeeignet, was unsere eigene Erfahrung auf tragische Weise bestätigt hat. Der bürokratischen Maschine zu erklären, dass dies "überhaupt nicht das ist, was Sie dachten", ist sehr schwierig, und seitdem nennen wir solche Systeme Positioniersysteme.
Nerdy Mode erIn Anbetracht der Mehrdeutigkeiten der Übersetzung ist zu erwähnen, dass das Ortungssystem beispielsweise nicht mit dem sogenannten zu verwechseln ist Dynamische Ortung auf Schiffen, dynamische Ortungssysteme (Eng. DP, Dynamic Positioning), dies ist in der Regel ein benachbartes Gebiet, bedeutet aber etwas anders - Systeme, mit denen ein Schiff seine geografische Position und Orientierung (Kurs) beibehalten kann und an einem Ort „schwebt“.
Allgemein anerkannte Klassifizierung nach der relativen Größe der Basislinie und ihrer Unvollständigkeit
Zurück zu den Anfangsbuchstaben der Abkürzungen USBL, LBL und SBL. Sie bestimmen die relative Größe der Baselines.
Im Allgemeinen wird es relativ zur maximalen Größe der möglichen Flugbahn eines positionierten Objekts bestimmt.
Wenn es zum Beispiel recht einfach zu erklären ist, haben wir
den überzeugten Taucher
gezwungen , das Angeklagte an sich zu hängen und seine Bewegungen zu überwachen. "Maximale Größe der möglichen Flugbahn eines positionierten Objekts" ist der Durchmesser des Kreises, auf den die gesamte Flugbahn seiner Bewegung passt.
Nerdy Mode erBei aller Genauigkeit muss erwähnt werden, dass die Flugbahn des Tauchers in dem Koordinatensystem gemeint ist, das der Messbasis zugeordnet ist. Das heißt Wenn wir einem Taucher von einem Schlauchboot eines Hilfsschiffs aus folgen und mit ihm treiben, können wir im Prinzip ein paar Kilometer treiben (in der Realität geht das natürlich nicht mit Tauchern, sondern mit einem ferngesteuerten Roboter - komplett). Und es ist genau die Flugbahn, die in Bezug auf unser Schiff geschätzt wird.
Es ist klar, dass das Klassifizierungsattribut so lala ist, und ich stimme voll und ganz zu. Trotzdem ist die allgemein akzeptierte Klassifikation so strukturiert. Und sie unterscheiden:
- USBL, Ultrakurzbasislinie - Ultrakurzbasis-Systeme, bei denen die Abmessungen der Basislinien viel kleiner sind als die Flugbahn des positionierten Objekts und
- SBL, kurze Basislinie - Systeme mit kurzer Basis, bei denen die Abmessungen der Basislinien mit der Flugbahn eines positionierten Objekts vergleichbar sind.
- LBL, lange Basislinie - Systeme mit langer Basislinie, bei denen die Abmessungen der Basislinien die Abmessungen der Flugbahn des positionierten Objekts erheblich überschreiten.
Bei der Wahl der Klasse besteht eine gewisse Unklarheit zwischen Systemen mit kurzer und langer Basis, und häufig deuten sie als Zeichen für Systeme mit kurzer Basis auf eine starre Verbindung von Stützelementen untereinander hin - beispielsweise wenn sie auf einem Schiff befestigt sind. Die Stützelemente des Systems mit langer Basis sind in keiner Weise kinematisch verbunden, d.h. Änderungen ihrer Positionen im Raum sind unkorreliert.
Wir betrachten nun alle drei Typen und einige ihrer Kombinationen detaillierter im Hinblick auf ihre Stärken und Schwächen.
Ultrakurzbasis-Systeme
Wie der Name schon sagt, ist die Grundlinie in Ultrakurzbasis-Systemen (UKB-Systemen) viel kleiner als die Flugbahn des positionierten Objekts.
In den meisten existierenden (zum Beispiel
diesem [5] ,
diesem [6] und
diesem [7] ) UHF-Systemen beträgt die Größe der Basislinien in der Regel Einheiten bis Zehntel Zentimeter. Die meisten von ihnen sind goniometrische Systeme - d.h. Systeme, die den Einfallswinkel des Signals des Beacon-Responders oder Pingers bestimmen.
In Bezug auf das Layout bestehen solche Systeme aus:
- eine Basisstation - eine Vorrichtung, die eine Mehrelementempfangsantenne enthält, deren einzelne Elemente entweder eine phasengesteuerte Antennenanordnung bilden, in diesem Fall wird der Einfallswinkel aus der Phasendifferenz des eingehenden Signals zwischen den einzelnen Elementen oder einem Satz von Basislinien, die ebenfalls aus Paaren von einzelnen Elementen gebildet werden, bestimmt in diesem Fall wird der Eintreffwinkel durch unterschiedliche Verzögerungen beim Eintreffen des Signals zu den Elementen bestimmt;
Um das Copyright der Bilder nicht zu verfälschen, gebe ich unsere Zima-Base als Beispiel für eine Basisstation:
Auf dem Tisch:

Im Moment der Arbeit:

- Beacon-Responder, die auf eine Anfrage von der Basisstation antworten, wodurch wiederum die Laufzeit des Signals zwischen Beacon und Basisstation bestimmt werden kann (Slant Range), oder Pinger, die im Gegensatz zu Responder-Beacons in regelmäßigen Abständen ein Signal aussenden. Pinger kann mit der Basisstation vorsynchronisiert werden, wodurch die Laufzeit in eine Richtung gemessen werden kann.
Als Beispiel gebe ich noch einmal den Beacon-Responder unseres Zima-Systems:
Autonom mit Batteriekanister:

Onboard TNLA:

Es gibt auch Systeme, bei denen Transponder elektrisch mit einer Basisstation gekoppelt sind und das Abfragesignal als elektrischer Torimpuls geliefert wird.
Daher wird die Klasse der UKB-Systeme durch ein ziemlich breites Spektrum verschiedener spezifischer Ausführungen repräsentiert, und die Einstufung eines Systems als UKB liefert häufig nicht genügend Informationen über die spezifische Methode seines Betriebs.
Das folgende Bild zeigt das allgemeine Funktionsprinzip von UKB-Systemen.
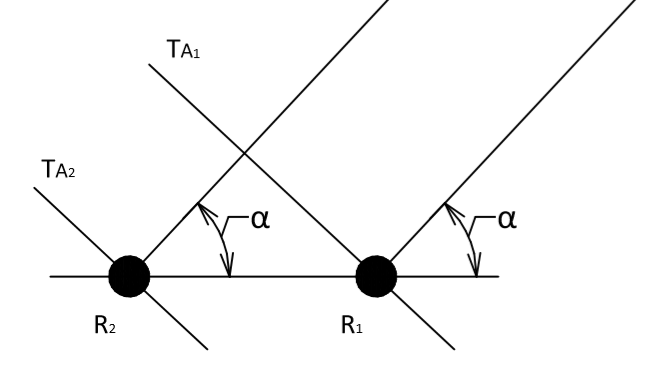 Demonstration des Funktionsprinzips von Systemen, die den Einfallswinkel eines Signals bestimmen
Demonstration des Funktionsprinzips von Systemen, die den Einfallswinkel eines Signals bestimmenDie obige Abbildung zeigt ein Paar Antennen-Array-Wandler, die eine flache Signalfront empfangen. Aus bekannter Entfernung
zwischen Wandlern und gemessener Verzögerung
bestimmt durch den Winkel
Signal Ankunft.
Die offensichtlichen Vorteile von UKB-Systemen umfassen die geringe erforderliche Zusammensetzung der Ausrüstung und die schnelle Bereitstellung des Systems.
Im allgemeinen Fall kann der Responder oder Pinger
mit Klebeband umwickelt werden,
das einfach an einem positionierten Objekt befestigt wird, wodurch die Universalität des Gesamtsystems erhöht wird.
In einigen praktischen Fällen ist die Verwendung von UKB-Systemen unbestritten. Zum Beispiel, wenn eine Suche nach
versehentlich untergetauchtem Material durchgeführt wird, das gesunken ist und es angesichts der Weite des Suchbereichs nicht möglich ist, im Voraus eine lange Basis zu errichten, oder wenn die Tiefe des Ortes keine schwimmende lange Basis ermöglicht und die Installation der unteren Basis in Bezug auf den Zeitrahmen und / oder das Wetter nicht gerechtfertigt ist Bedingungen.
UKB-Systeme weisen jedoch bestimmte schwerwiegende Nachteile auf. Um beispielsweise die Position eines positionierten Objekts in absoluten Koordinaten zu bestimmen, muss die Basisstation selbst vollständig im Raum definiert sein: Sie müssen nicht nur ihre geografische Position kennen, sondern auch die Ausrichtung des Empfängerarrays im Raum: Azimutwinkel, Roll- und Trimmwinkel.
Das heißt, aus struktureller Sicht sollte das UHF-System nicht nur eine Mehrelement-Antennenanordnung enthalten, die an sich sehr komplex ist, sondern auch Geräte, die ihre Position im Raum bestimmen können - Neigungssensoren entlang zweier horizontaler Achsen und einen Sensor Kurs - Magnet- oder GNSS-Kompass. Wenn die Peilantenne auf etwas unter Wasser installiert ist, ist dementsprechend die Möglichkeit der Verwendung des GNSS-Kompasses geschlossen.
Darüber hinaus seit Die Position des gewünschten Objekts wird entweder durch zwei Einfallswinkel des Signals (horizontal und vertikal) oder durch den horizontalen Winkel und die Tiefe (die modisch und progressiv sind) geschätzt, die im Signal des Responders oder Pingers übertragen werden. Es ist offensichtlich, dass die endgültige Winkelgenauigkeit erreicht wird
Systeme bieten mit zunehmender Reichweite beides
der Fehler der ermittelten Position des positionierten Objekts, der mit der Entfernung proportional zur Tangente des Winkelfehlers zunimmt, wie in der folgenden Abbildung dargestellt:
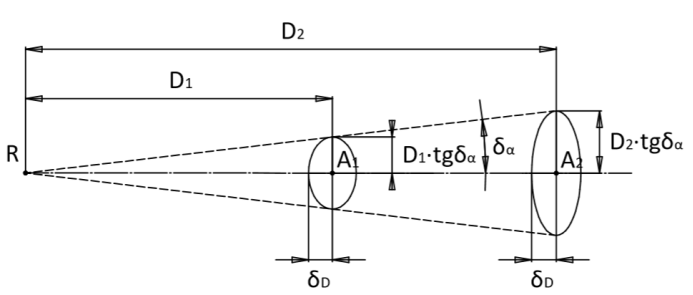 Einfluss der Winkelgenauigkeit von UKB-Systemen auf den Fehler bei der Positionsbestimmung eines positionierten Objekts
Einfluss der Winkelgenauigkeit von UKB-Systemen auf den Fehler bei der Positionsbestimmung eines positionierten ObjektsDie obige Abbildung zeigt die Streuung des ermittelten Ortes der Signalquelle. Eine der Halbachsen der Ellipse
bestimmt durch den Fehler bei der Messung der Entfernung, und die andere, als
Dabei ist D der Abstand (Neigungsbereich) zur Quelle.
Darüber hinaus sind die UHF-Systeme insgesamt sehr stark von der Mehrwegeausbreitung beeinflusst, insbesondere wenn es nicht möglich ist, einen direkten Strahl zu identifizieren (lesen Sie die Vorderseite des Signals, rufen Sie denjenigen direkt von der Quelle ab, ohne von irgendetwas zu reflektieren) Es gibt Reflexionen von der Küste oder anderen Elementen der Unterwasserlandschaft.
Mit anderen Worten, bei starken reflektierten Signalen aus anderen Richtungen (bis zum Gegenteil) ist das UHF-System nicht immun gegen die Annahme eines solchen Signals als direkt (da dieses Problem im Allgemeinen nicht lösbar ist - die Summe der reflektierten Signale kann stärker, "lauter" als direkt und so weiter sein manchmal in der Praxis), was zu völlig falschen Ergebnissen bei der Lösung des Navigationsproblems führt.
Neuere Systeme verwenden die direkte Messung der Tiefe des Transponders oder Pingers, während ältere Systeme die Position unter zwei Winkeln bestimmen. Tatsache ist, dass der vertikale Winkel die geringste Sicherheit hat, weil Der gesamte Schall kann mehrere Bodenreflexionen erfahren, und seine Definition ist nur bei geringsten Entfernungen relevant. Dies ist in der folgenden Abbildung dargestellt, in der der vertikale Abschnitt des Kanals im oberen Bild dargestellt ist, und es ist ersichtlich, dass der Fehler bei der Bestimmung des vertikalen Winkels aus einem der reflektierten Signale völlig inakzeptabel sein kann. Gleichzeitig ist im unteren Teil der Figur, in der eine Draufsicht gezeigt ist, zu sehen, dass alle reflektierten Signale aus der gleichen horizontalen Richtung stammen.
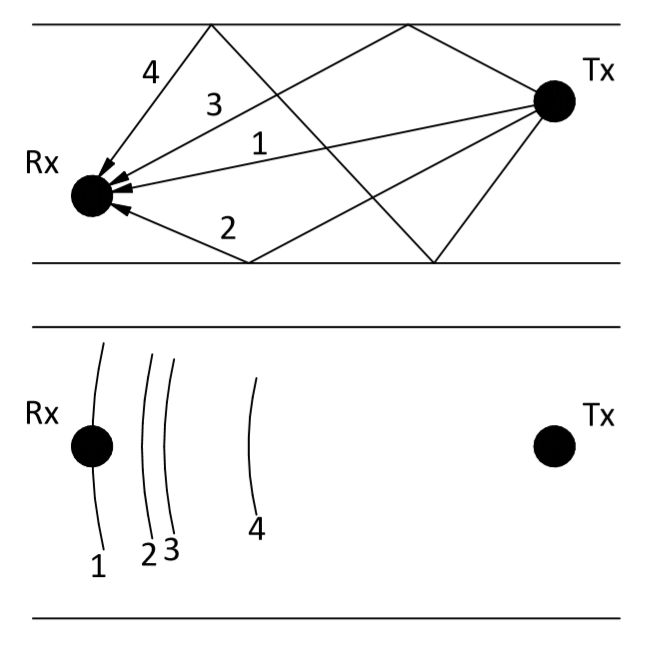 Unterschiedliche Genauigkeit bei der Bestimmung von horizontalen und vertikalen Winkeln in UKB-Systemen
Unterschiedliche Genauigkeit bei der Bestimmung von horizontalen und vertikalen Winkeln in UKB-SystemenZusammenfassend lässt sich sagen, dass es in ihrem Anwendungsbereich schwierig, ungerechtfertigt oder unmöglich ist, andere Arten von Navigationssystemen und Ortungssystemen einzusetzen.
Hersteller moderner UKB-Systeme geben eine Winkelgenauigkeit ihrer Produkte von bis zu 0,03 ° (1σ) an
[8] .
Ihr Vorteil: Einsatzgeschwindigkeit und Vielseitigkeit.
Aufgrund der Erfahrung mit der Kommunikation mit Benutzern kann ich sagen, dass jeder in der Umgebung nur UKB möchte, nur wegen der Geschwindigkeit der Bereitstellung. Und egal wie viel ich erkläre, egal wie viel ich schreibe, alle nicken, aber sie wollen immer noch das UCB benutzen. Wie das Sprichwort sagt: "Vergiss nicht zu leiden."
Einige Unerfahrene verwenden im Allgemeinen die Abkürzung USBL als Bezeichnung für ein beliebiges Unterwasser-Ortungssystem.
Nerdy Mode erNoch merkwürdiger ist es, wenn ein hydroakustisches Ding als Sonar bezeichnet wird. Wir sind gute Literaten, und wir erinnern uns, dass ein Sonar wie ein Radar ist, nur mit Ton, das heißt Sonar, aber das ist eine ganz andere Geschichte.
Kurze Basissysteme
Short-Base-Systeme befinden sich in den allermeisten Fällen an den Rümpfen von Spezialschiffen. Das heißt, die Abmessungen der Basislinien sind mit den Abmessungen des Gefäßes vergleichbar.
Gegenwärtig ist die Genauigkeit von UHF-Systemen recht hoch, und der Bedienkomfort ist weitaus rentabler als bei KB, was dazu führte, dass KB-Systeme aufgrund der weit verbreiteten Nutzung verdrängt wurden. Die von KB-Systemen gelösten Aufgaben umfassen nur noch diejenigen, die bestimmte Bedingungen haben, die dies nicht zulassen UKB-System anwenden.
In der Vergangenheit wurden jedoch Designbüros eingesetzt, um beispielsweise die Triest-1-Bathyscaphe zum Sterbeort des US Navy Thresher-U-Boots zu eskortieren. Das SHARPS SBL KB-System wurde am Woods Hole Oceanographic Insititution eingesetzt, um das Tiefsee-Fahrzeug JSON zu seinem Absenkständer MEDEA zu begleiten. Die erreichte Positionierungsgenauigkeit von 0,09 m wird angegeben [9].
Von modernen KB-Systemen können wir
dieses [10] nennen , das vom Hersteller als „Unterwasser-GPS“ positioniert und als Designer vertrieben wird.
Damit das Auge den Charme und die „Einfachheit“ des Einsatzes erfassen und spüren kann, möchte ich einige Bilder aus unseren jüngsten Tests des Prototyps des KB-Systems zum Parken eines autonomen Unterwasserfahrzeugs geben:

Der Aluminiumrahmen ist die kurze Basis. Sie können sich vorstellen, wie bequem es ist, dieses Design zu starten.

Fairerweise sollte man sagen, dass es in der gesamten Ideologie der Arbeit nur einmal vorkommen sollte. Wir mussten es auch bei Tests erhöhen - das Profil kostet Geld und Hydrophone liegen nicht auf der Straße.
Zusammenfassend stellen wir fest, dass:
Die Vorteile von KB-Systemen umfassen:
- Einsatzgeschwindigkeit und Mobilität (Systeme sind normalerweise auf einem Schiff montiert);
- Durchschnittlich höhere Genauigkeit im Vergleich zu UKB-Systemen (wobei jedoch zu beachten ist, dass beispielsweise einige hochwertige UKBs [8] im Allgemeinen eine höhere Positionsgenauigkeit aufweisen als einige einfachere KBs wie das bereits erwähnte Waterlinked GPS [10] ). .
Durch die Nachteile kann KB die gleichen Nachteile aufweisen, die UHF-Systemen inhärent sind, nämlich:
- die Notwendigkeit, die Ausrichtung der Messbasis (Basislinien) zu bestimmen - an den Ecken der Strecke rollen und trimmen Sie zusätzlich zur absoluten geografischen Position;
- Korrelation von Fehlern bei der Bestimmung von Ankunftszeiten auf Basiselementen im Hinblick auf ihre kinematische Verbindung, beispielsweise aufgrund von Steigung
- und da ein Konstruktionsbüro im Allgemeinen als goniometrisches System arbeiten kann, besteht auch das Problem, dass die Genauigkeit abnimmt, wenn ein positioniertes Objekt von der Basis entfernt wird.
- ( «») .
Das sind meine Lieblingssysteme. DB - bedeutet Long Base , nicht was Sie dachten . Die Abmessungen der Basislinien sind viel größer als die Flugbahn des positionierten Objekts, und die Basiselemente sind nicht kinematisch miteinander verbunden. In der Regel kann eine Basis ein Boden sein, wie [11] und [12] , wenn sich seine Elemente am Boden befinden, oder sie kann schwimmend sein, wenn die Stützelemente Bojen sind, die mit GNSS-Empfängern ausgestattet sind. Hier können wir Systeme als Beispiele anführen [13] ] und [14] , GPS GNSS-Systeme [15] , GLONASS [16], Galileo [17] , Beidou [18] und einige ihrer Vorgänger - die Systeme DECA [19], Chaika [20] und LORAN [21].DB-Systeme bieten maximale Genauigkeit bei der Bestimmung der Position eines positionierten Objekts, da die Größe von Bedeutung ist und viele Nachteile von UCB- und KB-Systemen, wie z. B. die Verringerung der Genauigkeit beim Verlassen der Basis, weitgehend vermieden werden. DB bietet im Durchschnitt die gleiche Genauigkeit innerhalb der Navigationsbasis und beim Verlassen Ein darauf positioniertes Objekt kann weiterhin als goniometrisches System fungieren.DB-Systeme sind weitaus weniger anfällig für Fehler im Zusammenhang mit der Mehrwegeausbreitung, wie unten gezeigt wird. Wenn der direkte Strahl falsch bestimmt wird, kann die Laufzeitdifferenz gering sein (Einheiten von Metern), was im schlimmsten Fall leicht durch das Vorhandensein überschüssiger Referenzpunkte ausgeglichen werden kann ein Fehler bei der Bestimmung des Ortes der Größenordnung der Differenz im Strahlengang, während die UCB den Einfallswinkel dieses Strahls abschätzen konnte, was sich als nahezu alles herausstellen kann, was wiederum führt zu völlig inakzeptabel Fehler.Unter den Minuspunkten der DB-Systeme ist vor allem die Komplexität der Installation zu nennen. Dies gilt insbesondere für die untere Basis: Zum einen sollten die unteren Elemente eine ausreichende Autonomie bieten, um das Service-Zeitintervall zu maximieren, und zum anderen, weil In der Regel arbeiten solche Systeme in erheblichen Tiefen (ab 500 Metern), dann werden zusätzliche Anforderungen an normobare Gebäude gestellt, und drittens besteht ein zusätzliches Problem darin, den Sockel nach Abschluss der Arbeiten zu entfernen.Und schließlich muss nach der Installation der Basis die Position ihrer Elemente mit geodätischer Genauigkeit bestimmt werden, z. B. mit der virtuellen DB-Methode oder mit UCB-Systemen unter Verwendung einer großen Auswahl an Messungen.All diese Operationen erfordern spezielle, teure Ausrüstung und die Arbeit vieler hochqualifizierter Spezialisten.Viel einfacher ist der Fall mit der schwimmenden Basis. Hydroakustische Empfangs-, Sende- oder Empfangs- und Sendebojen können von fast jedem Wasserfahrzeug aus installiert werden (wir stellen unsere eigenen in 15 Minuten von einem aufblasbaren Ruderboot aus ein). Angesichts der einfachen Installation und Demontage können die Stützelemente wenig autonom sein und ihre Rümpfe können im Allgemeinen atmosphärisch gestaltet werden leistung.Es ist anzumerken, dass die Verwendung einer schwimmenden Basis bei Arbeiten in großen Tiefen aus zwei Gründen sehr kompliziert ist: Die erste ist die Schwierigkeit, einen Anker zu installieren, die im Prinzip durch eine motorisierte schwimmende Basis gelöst wird, die die automatische Beibehaltung der geografischen Position gewährleistet, und die zweite ist schwerwiegender und dies häufig schließt die Verwendung einer schwimmenden Basis aus, wenn in großen Tiefen gearbeitet wird - das Vorhandensein einer internen Totalreflexion des Signals von der Sprungschicht (dh die Schicht des Sprungs in der Schallgeschwindigkeit. Die Trennung von Wasserschichten mit unterschiedlichen Dichte, von der Schall vollständig reflektiert werden kann).Die einzige Lösung besteht darin, die hydroakustische Antenne unter der Sprungschicht zu entfernen, was wiederum zu weiteren Problemen führt - der Komplexität der topografischen Positionierung der hydroakustischen Antenne, dem Gewicht des Kabels, einer sehr komplizierten Konstruktion und hier sind wir wieder am Anfang.Als visuelles Beispiel bringe ich traditionell unser RedWAVE DB-System mit, Bojen (der Taucher ist einzigartig und nicht im Paket enthalten): Und den Navigationsempfänger:
Und den Navigationsempfänger:
Wir haben mehrere Artikel über dieses System. Virtuelle Long-Base-Systeme
Systeme auf der Basis der sogenannten virtuelle lange Basis [22] [23] [24] (VDB, englisch VLBL - virtual long baseline) sind aus Design- und Layoutgründen als separate Gruppe zuzuordnen.Das Wesentliche an VDB-Systemen ist, dass die Neigungsbereiche zum Transponder oder die Ankunftszeiten des Pinger-Signals an verschiedenen Punkten im Raum gemessen werden. Dieser Ansatz gilt, wenn eine Bedingung erfüllt ist: Das positionierte Objekt behält eine feste Position bei und der sich bewegende Referenzpunkt bildet Elemente der Navigationsbasis, indem er die Entfernung erstellt oder misst an den Angeklagten oder Festlegen der Ankunftszeiten des Pinger-Signals aus verschiedenen Positionen.Diese Klasse von Navigationssystemen mit all ihren offensichtlichen Einschränkungen hat die breitesten Perspektiven: Erstens ist keine komplexe Ausrüstung erforderlich, wie zum Beispiel bei UXB-Systemen - die Aufgabe wird nominell nur mit zwei Transceivern oder mit einem Sender und einem Empfänger gelöst, die von was nicht benötigt werden oder auf besondere Weise im Raum zu orientieren. Im Falle eines Pingers ist es möglich, eine kooperative Suche nach einem Pinger unter Verwendung einer Herde autonomer Oberflächenfahrzeuge zu organisieren. Dies gilt insbesondere für die Suche nach versunkenen Objekten (z. B. abgestürzten Flugzeugen oder Schiffen) auf einer theoretisch unbegrenzten Fläche. Eine der Methoden zum anfänglichen Bestimmen der Position der Elemente der unteren langen Basis ist auch die WDB-Methode.Als Beispiel gebe ich unser Demo-Projekt (sogar zwei!) Von einer virtuellen langen Basis auf zwei uWAVE-Mikromodems.Der erste Entwurf ist in einem unserer vorherigen Artikel beschrieben . Dort wurden Modem, GNSS-Modul und Funkmodul über eine Karte am STM32 zusammengefasst.In der neuen Reinkarnation dieses Projekts wurde der Code in Arduino UNO umgeschrieben und die Lösung des Navigationsproblems in einer Open-Source-Anwendung ausgeführt .Kombinierte Systeme
Kombinierte Systeme enthalten normalerweise Elemente aus zwei oder mehr Systemklassen. So gibt es zum Beispiel im Aufsatz [1] beschriebene technische Lösungen, die eine ausfahrbare lange Basis und eine auf einem Schiff montierte kurze Basis kombinieren, deren Hauptaufgabe darin besteht, die Elemente einer langen Basis zu positionieren. Selbstverständlich kann die Positionierung der Elemente einer langen Basis auch mit Hilfe von UKB-Systemen durchgeführt werden.Im Allgemeinen kann festgestellt werden, dass die Wahl eines bestimmten Syntheseschemas seltsamerweise durch das zu lösende Problem bestimmt wird.In den allermeisten Fällen ist das Ziel der Synthese verschiedener Systemklassen die anfängliche Positionierung der Stützpunkte einer langen Basis.Exotisch
Hier werden nur einige Klassen von Systemen kurz angesprochen, sobald sie sich indirekt und formal auf das Thema des Artikels beziehen.Darunter sind akustische Systeme, die auf der Koppelnavigation basieren, auf der sogenannten aufgebaut Dopplerverzögerungen, Geräte, die die Geschwindigkeit eines Positionierungsobjekts relativ zum Boden messen, indem sie ein akustisches Signal in mindestens drei eng gerichteten Strahlen aussenden und diesen anschließend empfangen. Die Bewegung des Objekts relativ zum Boden führt zum Auftreten einer Doppler-Frequenzverschiebung des ausgesendeten Signals, die in der Empfangsstufe erfasst wird.Die Doppler-Verschiebung wird in der Projektion der Geschwindigkeit entlang drei Achsen neu berechnet. In Kombination mit den Messwerten des Kurssensors (Kompass) und den Messwerten des Beschleunigungsmessers wird eine Folge von Entscheidungen für den Ort des Objekts gebildet. Das Einleiten dieser Sequenz erfordert eine anfängliche Positionierung. Diese Art von System hat hauptsächlich militärische Anwendungen im Hinblick auf relative Geheimhaltung und Autonomie. Es weist alle Nachteile von Dead-Reckoning-Systemen auf, die mit der schnellen Häufung von Fehlern verbunden sind. Das heißt
Die Genauigkeit nimmt mit der Zeit ab.Es gibt immer noch exotisch-exotisch und ziemlich exotisch. Zum einen verweise ich auf Systeme, die auf der Analyse von Bodenbildern basieren ( CARL! ), Und zum anderen auf die Navigation durch Magnetfeldschwankungen ( CARL !!! ). Was die praktische Anwendbarkeit beider betrifft, so möchte ich, wie sie sagen, "ernsthafte Besorgnis zum Ausdruck bringen".Im trockenen Rückstand
In der bestehenden Klassifikation gibt es drei Hauptklassen von Sonarnavigationssystemen:- , - . , , , . [1] 0.5-0.2% .
- , ( ) , ; , -, , [1] , 0.5% ;
- Lange Basislinie, bei der die Position des Objekts durch drei oder mehr geneigte Bereiche (oder Unterschiede) bestimmt wird, gemessen zu drei oder mehr weit auseinander liegenden Bezugspunkten. Diese Klasse von Systemen ist schwierig zu verwenden und zu warten, sie kann in zwei sehr unterschiedlichen Versionen implementiert werden - dem Boden und der schwimmenden Basis und hat laut dem Autor [1] im Vergleich zu anderen Klassen von Systemen eine maximale Genauigkeit - etwa 0,1% der Tiefe des Ortes. In der von mir bereits gelöschten Vickery-Übersicht werden die absoluten Werte des Positionierungsfehlers des positionierten Objekts für Systeme angegeben, die in verschiedenen Frequenzbereichen arbeiten - von 2-3 Metern für Niederfrequenzsysteme (bis zu 15 kHz) bis zu 1 Meter für Mittelfrequenzsysteme (19-36) kHz) und bis zu 5 cm für Systeme mit Frequenzen von 50 bis 110 kHz.
PS
Vielen Dank für Ihre Aufmerksamkeit, wir freuen uns auf konstruktive Kritik und beantworten Ihre Fragen.
Wenn dieser Artikel das Interesse der Leser weckt, dann werde ich im nächsten Artikel über die korrekte Klassifizierung von Unterwassernavigationssystemen sprechen.
Wenn alles gut geht, werde ich in einem anderen Artikel verschiedene Algorithmen für den Betrieb von Navigationssystemen mit Codebeispielen analysieren.
Liste der Quellen- Vickery, K. (nd). Akustische Ortungssysteme. Ein praktischer Überblick über aktuelle Systeme. Bericht über den Workshop 1998 über autonome Unterwasserfahrzeuge (Kat. Nr. 98CH36290).
- Diogenes Laertius. Das Leben und die Meinungen bedeutender Philosophen von Diogenes Laertius (Übersetzung von Yonge, CD). London: George Bell und seine Söhne, 1905. Google books. Web 01 Apr. 2019.
- Frankland, William B., Das erste Buch der Euklidischen Elemente: Mit einem Kommentar, der hauptsächlich auf dem von Proclus Diadochus basiert. Cambridge: bei der University Press, 1905 .
- Genauigkeitsbeschränkungen von hyperbolischen Multilaterationssystemen, Harry B. Lee, Massachusetts Institute of Technology, Lincoln Laboratory, Technischer Hinweis 1973-11, 22. März 1973
- evologics.de/usbl
- www.tritech.de/media/products/usbl-tracking-system-micronnav.pdf
- www.ixblue.com/products/posidonia
- www.ixblue.com/sites/default/files/2018-02/Gaps.pdf
- Integration der präzisen relativen Positionierung in JASON / MEDEA ROV-Operationen, Bingham et al., MTS Journal, Frühjahr 2006 (Band 40, Nummer 1)
- waterlinked.imtqy.com/docs/explorer-kit/introduction
- www.ixblue.com/sites/default/files/2019-01/Ramses%20-%20Datasheet.pdf
- evologics.de/web/content/16763?unique=cc5bc295cb0a4bf681a31de24fdb204f62169c2b&download=true
- github.com/ucnl/Docs/blob/master/RU/RedWAVE/RedWAVE_LBL_Deployment_maintenance_RedNAV_ru.pdf
- www.alseamar-alcen.com/sites/alseamar-alcen.com/files/pdf/products/fiche_205x292_gib-sar.pdf
- www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf
- "Das globale Navigationssystem GLONASS: Entwicklung und Nutzung im 21. Jahrhundert." 34. Jährliche PTTI-Sitzung (Precise Time and Time Interval). 2002.
- download.esa.int/docs/Galileo_IOV_Launch/Galileo_factsheet_2012.pdf (PDF). ESA 15. Februar 2013. Abgerufen am 8. Dezember 2019.
- "Wegbeschreibung 2017: BeiDous Weg zum globalen Service." GPS-Welt. 6. Dezember 2016.
- Derek Howse, Radar auf See. Macmillan Press, Großbritannien 1993. ISBN 1-55750-704-X
- GOST R 54025-2010 Funknavigationssystem "Die Möwe". Empfangsgeräte. Anforderungen an technische Spezifikationen. Testmethoden und erforderliche Testergebnisse
- Die Entwicklung von Loran-C Navigation und Timing, Gifford Hefley, US National Bureau of Standards, Okt. 1972.
- MB Larsen, "Synthetic Long Baseline Navigation von Unterwasserfahrzeugen", präsentierte auf der Oceans 2000 MTS / IEEE Conference and Exhibition, 2000.
- João Saúde, Antonio Pedro Aguiar, Akustische Navigation mit einem einzigen Leuchtfeuer für ein AUV bei unbekannten Meeresströmungen, IFAC Proceedings Volumes, Vol. 3, No. 42, Ausgabe 18, 2009, pp. 298-303, ISSN 1474-6670, ISBN 9783902661517, doi.org/10.3182/20090916-3-BR-3001.0057 .
- Alexander Dikarev, Stanislav Dmitriev, Vitaliy Kubkin, Andrey Vasilenko. Positionsschätzung von autonomen Unterwassersensoren unter Verwendung der Methode der virtuellen langen Basislinie, International Journal of Wireless & Mobile Networks (IJWMN), Vol. 3, No. 11, Ausgabe 2, April 2019