Wir lieben Roboter. Wir sind Studenten technischer Universitäten, Designer, Elektronikingenieure, Programmierer und wir alle lieben es, Roboter zu bauen. Vor zwei Jahren erschien unser SetUP-Team auf der Basis des Sberbank-Robotiklabors und nahm gleichzeitig am Wettbewerb zur Schaffung mobiler autonomer Roboter Eurobot Open für junge Robotikfans teil. Im Moment spielte die Mannschaft 2 Saisons, wurde zweimal Vizemeister, betrat die internationale Bühne. Wir haben tagelang nicht geschlafen, unsere Roboter programmiert, verlötet, montiert und demontiert, eine Stunde vor dem Wettkampf ernsthafte Probleme festgestellt, und dann haben sie immer noch begonnen. Wir haben auch ein unvergessliches Erlebnis und eine Reihe von interessanten Lösungen, über die wir in einer Reihe von Artikeln (mit vielen GIFs, sorgfältig, Verkehr) sprechen wollen.

Eurobot Open ist ein internationaler Wettbewerb autonomer Roboter. Die Aufgaben, das Schlachtfeld und die Spielelemente ändern sich jedes Jahr, aber die Essenz bleibt gleich - das Team muss zwei autonome Roboter erstellen, die 100 Sekunden lang auf einem kleinen Feld um begrenzte Ressourcen mit den Robotern des Gegners konkurrieren. Dieser kurze Vorschlag verbirgt eine Vielzahl von Aufgaben, die das Team lösen muss, denn Roboter müssen schnell und wendig sein, Aufgaben unabhängig ausführen können und sich nicht dem Feind stellen müssen. Und jedes Jahr müssen neue Roboter entwickelt werden. Dennoch können die Erfahrungen und Erfolge der vergangenen Jahre einen großen Vorteil bringen. Von Jahr zu Jahr brauchen wir Lokalisierungssysteme, Vorhersagen feindlicher Bewegungen und Vermeidung von Kollisionen, Routenplaner, flexible Verhaltensmanagementsysteme, unsere eigene Elektronik und Mechanik. Ja, für viele dieser Funktionen gibt es Standardalgorithmen und -bibliotheken. Aufgrund der Besonderheiten der Funktionen und der Anforderungen an den Ressourcenverbrauch muss der Großteil der Funktionen jedoch noch stark modifiziert oder von Grund auf neu geschrieben werden.
 Unser Team beim russischen Finale in Moskau.
Unser Team beim russischen Finale in Moskau.Cooles Video über unsere Teilnahme im Jahr 2019:
Das Hauptspielthema im Jahr 2019 war Kernenergie. Dies bedeutet jedoch nicht, dass die Teams einen Roboter bauen mussten, der von einem Nuklearmotor angetrieben wird. Nur verschiedene Spielaufgaben und -elemente erhielten thematische Namen. Das einzige manipulierte Spielobjekt waren Hockey-Pucks - Elektronen. Sie haben unterschiedliche Gewichte, unterschiedliche Farben und ein „Gold“ unterschiedlicher Größe. Es ist notwendig, maximal Unterlegscheiben an verschiedenen Stellen des Feldes, an verschiedenen Positionen und in verschiedenen Höhen zu sammeln und sie dann in Zonen auf dem Feld zu sortieren, je nachdem, um welche Art von chemischem Element es sich handelt.
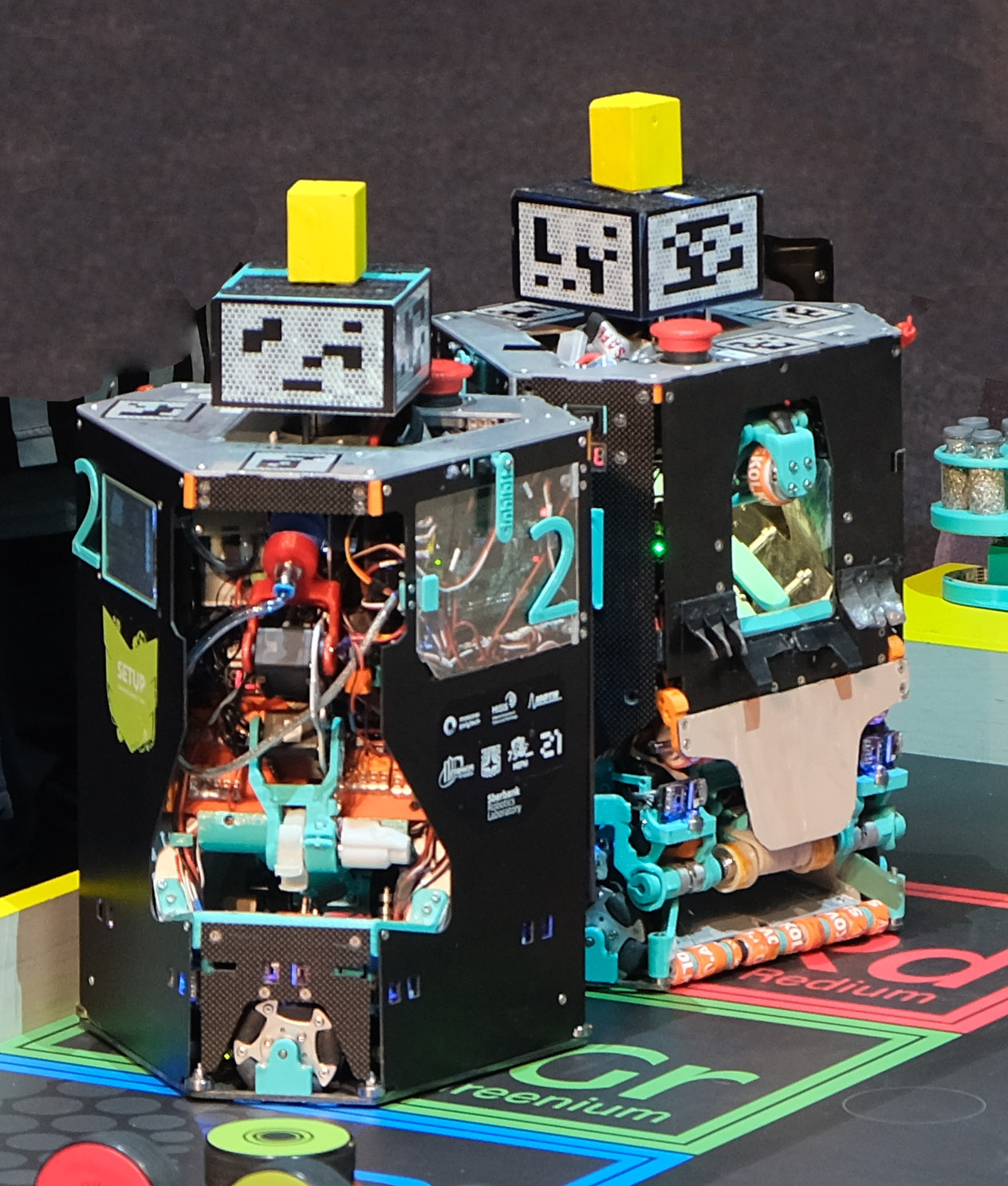
 So sah das Spielfeld 2019 aus.
So sah das Spielfeld 2019 aus.Die Codenamen für unsere Roboter in diesem Jahr waren Chip und Dale. Warum? Ich denke, die Antwort geht aus dem Foto hervor:
Lassen Sie uns die grundlegenden technischen Lösungen unserer Roboter in der letzten Saison genauer betrachten. In diesem Jahr haben wir so viel wie möglich versucht, um alles zu vereinen, und wir hatten zwei Zwillingsroboter. Das Strukturdiagramm unserer Roboter im Bild unten.
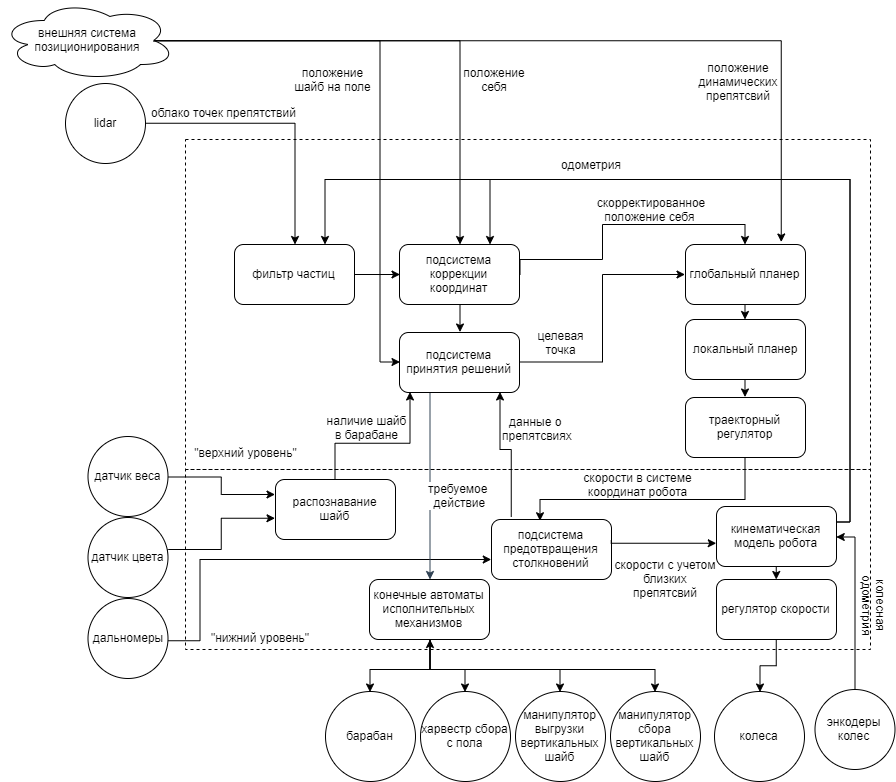
Die obere Ebene wurde von einem auf einem Board getesteten Odroid xu4 mit Ubuntu 16.04 und ROS Kinetic an Bord vertreten. Alle „schwierigen“ Aufgaben drehen sich darum.
Auf der unteren Ebene arbeitet der STM32F407VGTX-DISC1 in einer selbst entworfenen Abschirmung, mit der Sie bequem ein Dutzend Motoren, Servos und eine Girlande von Sensoren anschließen können. Übrigens gewinnen sie immer eine beeindruckende Menge. Jeder unserer Roboter enthält LIDAR, 7 DC / BLDC-Motoren, 9 Servos und ca. 25 verschiedene Sensoren (Farben, Gewichte, Entfernungen, Ströme). Und das alles zusammen mit weiteren 6 Volumenmechanismen wurde in kompakte Roboter mit einem Umfang von 850 mm und einer Höhe von 350 mm eingebaut. FreeRTOS, das Aufgaben erfüllt, die eine Echtzeitausführung, die Verarbeitung aller Sensoren und Zustandsautomaten erfordern, dreht sich auf STM.
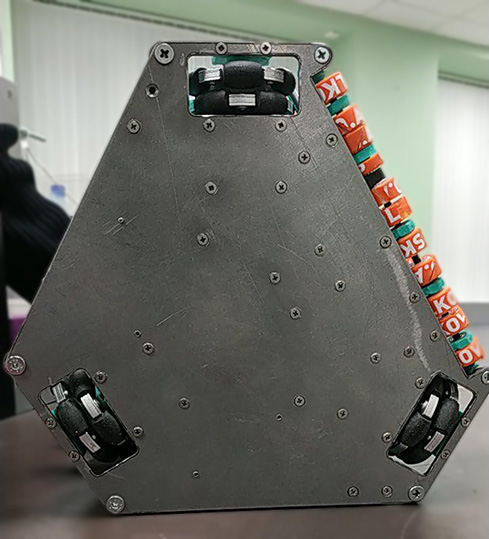 Blick auf die Omnicholes des Roboters.
Blick auf die Omnicholes des Roboters.Ein interessantes Merkmal ist die Verwendung einer Allradplattform als Antrieb, die es uns ermöglicht, in jede Richtung und auf jede Seite zu fahren, ohne unnötige Kurven zu fahren, was die Manövrierfähigkeit des Roboters dramatisch erhöht.
So ist zum Beispiel im nächsten Video des Spiels in Frankreich zu sehen, dass der Roboter trotz der Tatsache, dass wir gesperrt wurden (aufgrund eines groben Verstoßes eines Gegners gegen die Regeln), aus der Schmuckfalle entkommen ist.
Aufgrund von Omni ist die Genauigkeit der Rad-Odometrie jedoch sehr schlecht: Die Räder sind nicht perfekt rund, die Rollen spielen und haben einen kleinen Kontaktfleck. Um dieses Problem zu lösen, können Sie in regelmäßigen Abständen gegen die Wand schlagen, den Fehler zurücksetzen oder externe Anpassungssysteme anwenden. Relativ häufig werden dafür Lidars auf Roboter gelegt. Eine andere Lösung ist vor ein paar Jahren aufgetaucht: Dem Feld wurde eine Stelle hinzugefügt, an der Sie die Kamera platzieren können. Letztes Jahr fuhren wir nur durch eine externe Kamera mit Erkennung von am Roboter angebrachten Aruco-Markern, wobei wir gleichzeitig an der Lokalisierung mit einem Lidar am Roboter und einer externen Kamera arbeiteten (Lokalisierung und Navigation werden bald ein weiterer großer interessanter Artikel sein). Wir hatten keine Zeit, den Lidar zu testen, also fuhren wir um die Kamera herum und benutzten den Lidar als Ständer für Arucomarker. Vorteile des Systems - Wir kennen die Position aller Roboter auf dem Feld. Von den Minuspunkten - eine hohe Empfindlichkeit gegenüber externem Licht und Kalibrierungsgenauigkeit, die uns leider mehr als einmal versagt hat. Generell erlaubt uns die Kombination von Kilometerzähler und Aruden-Detektor, uns mit einer Genauigkeit von mehreren Millimetern auf einem Feld von 2 × 3 Metern zu positionieren.
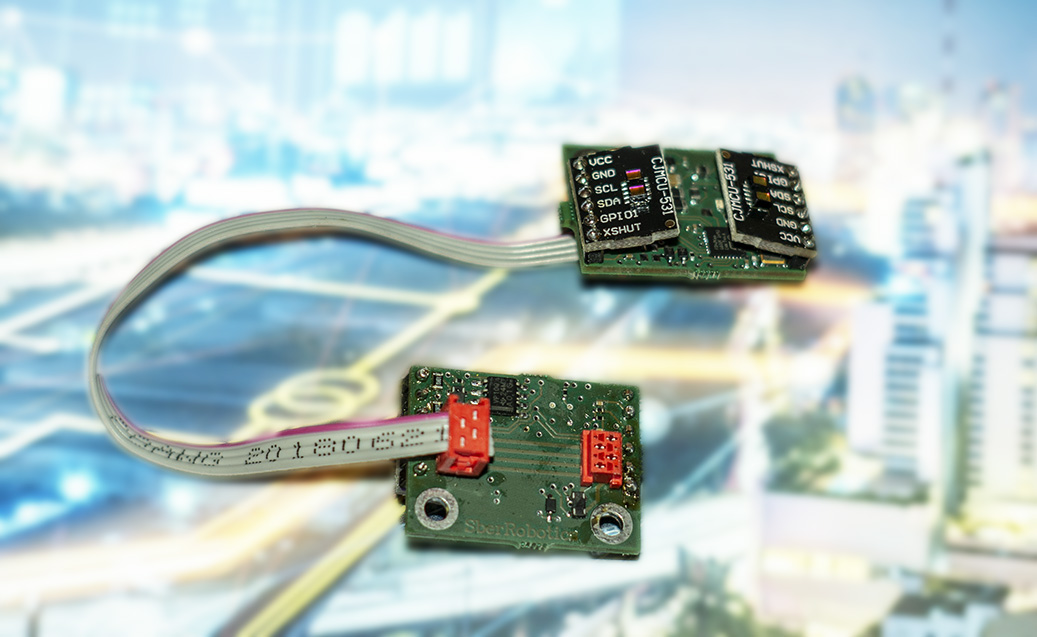 Unsere entwickelte Entfernungsmesserkarte.
Unsere entwickelte Entfernungsmesserkarte.Die Regeln verbieten Kollisionen mit anderen Robotern (dazu können sie auch disqualifizieren), daher ist es wichtig, dass der Roboter Hindernisse auf seinem Weg rechtzeitig bemerkt. Normalerweise werden zur Überwachung der Nahzone gewöhnliche IR-Entfernungsmesser oder Sharp GP2Y0A21YK installiert, die extrem empfindlich auf der Oberfläche reagieren. Sie können beispielsweise poliertes Aluminium aus einem halben Meter Entfernung bearbeiten und sehen Kohlenstoff immer noch nicht im Fokus. Oft werden auch Ultraschall-Entfernungsmesser verwendet, die jedoch empfindlich auf den Winkel der reflektierenden Oberfläche reagieren und gegenseitige Störungen befürchten. In letzter Zeit gewinnen ToF-Entfernungsmesser, beispielsweise VL5310x oder VL5311x, schnell an Popularität. Nachdem Sie diese Sensoren einmal ausprobiert haben, ist es schwierig, sie abzulehnen - sie haben eine schwache Abhängigkeit vom Material des Hindernisses, eine hohe Genauigkeit, Kompaktheit und einen niedrigen Preis. Letztes Jahr haben wir jedoch versucht, den VL53l0x zu verwenden, und eine Reihe von Nuancen sind aufgetaucht. Was kann passieren, wenn Sie ein Dutzend und ein halbes Dutzend Entfernungsmesser zwischen eine Reihe von Motoren und Servos auf den i2c stellen? Darüber hinaus können die Sensoren auch keine konstante Adresse einstellen und die Kirsche in ihrem Phantom hängen. Aus diesem Grund haben wir dieses Jahr auf RS485 umgestellt, was die Verwendung von Entfernungsmessern erheblich vereinfacht hat. Auf den Fotografien des Roboters sind die blauen Lichter sie.
Hier verhindern wir auf jede erdenkliche Weise, dass der Roboter direkt zwischen zwei Punkten hin- und herbewegt wird, und es stellt sich heraus, dass er schlauer ist als wir:
Mit einem externen Lokalisierungssystem, einem vollwertigen Segelflugzeug und einer hervorragenden Kollisionsvermeidungszone können Sie diese Aufgaben mit einer Geschwindigkeit von 1 m / s ausführen. In den nächsten Artikeln werden wir versuchen, das Maximum über die interessantesten Dinge aus unseren Entscheidungen zu erzählen (und die Grundlagen zu schaffen), aber heute wollen wir über die Besonderheiten der Mechanik in diesem Jahr sprechen.
Das Design der Mechanik für Eurobot zeichnet sich durch seine Besonderheit aus. Erstens, da dies ein Wettbewerb ist, sollte alles so schnell wie möglich und hundertprozentig zuverlässig funktionieren. Zweitens ist die Aufgabe so festgelegt, dass die Mechaniker umso schwieriger konstruieren müssen, je mehr Punkte Sie verdienen möchten. Und je komplizierter die Mechanik ist, desto größer ist die Wahrscheinlichkeit eines Ausfalls, der nach Murphys Gesetz im ungünstigsten Moment eintreten wird.
Aufgaben mögen auf den ersten Blick einfach erscheinen, aber das ist überhaupt nicht der Fall: Die Aufgabe, Objekte zu manipulieren (nehmen, neu ausrichten, setzen), ist immer noch äußerst schwierig zu lösen. Im Gegensatz zu Industriemanipulatoren, die normalerweise statisch angeordnet sind, bei denen alle Koordinaten verschoben sind und die unter idealen Bedingungen arbeiten, ist alles kühler: Ich habe den Roboter auf das Feld gestellt, den Schlüssel gezogen und der Roboter arbeitet bis zum Ende des Rennens. Die Möglichkeit einer Koordinatenanpassung und zusätzlichen Fehlersuche ist praktisch nicht vorhanden. Es ist notwendig, mögliche schwerwiegende Lokalisierungsfehler oder Ungenauigkeiten bei der Herstellung des Feldes zu berücksichtigen (z. B. denkt der Roboter, dass er dem Puck zugewandt ist, den er nehmen möchte, aber tatsächlich ist er um 15 mm von der gewünschten Koordinate versetzt). Das Bewegen von Punkt zu Punkt wird nicht funktionieren: Unter den realen Wettbewerbsbedingungen werden Sie ernsthafte Probleme haben.
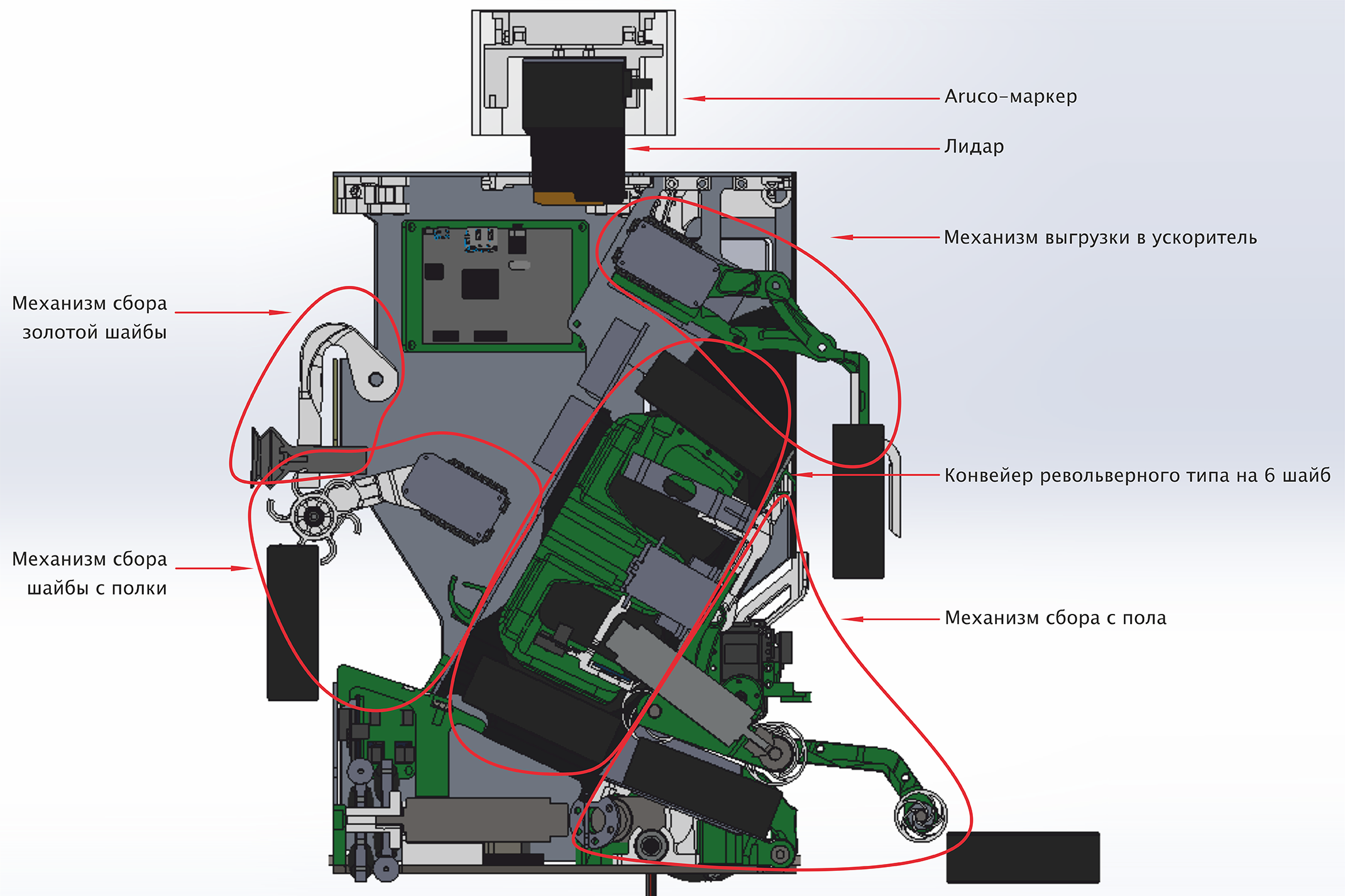 Anordnung der Mechanismen im Roboter.
Anordnung der Mechanismen im Roboter.Es ist uns gelungen, zwei identische Roboter zu konstruieren, die im Rahmen des Wettbewerbs alle möglichen Aufgaben gelöst haben. Der Roboter beherbergte ein Förderband mit 6 Scheiben, von denen wir jederzeit eine entnehmen konnten. Auf dem Feld befinden sich die Unterlegscheiben in zwei Positionen: auf dem Boden liegend und auf einem speziellen Regal stehend. Für jede Option wurde ein eigener Sammelmechanismus entwickelt. Die Unterlegscheiben aus dem Regal wurden mit einer speziellen Klappenrolle zusammengebaut, die die Unterlegscheiben auf die Rampe warf. Entlang der Rampe fuhr die Unterlegscheibe in die untere Zelle des Revolvers. Danach wurde ihre Farbe festgestellt, der Revolver rollte und der Roboter zog zur nächsten Unterlegscheibe.
Der Tragrahmen des Roboters bestand aus Aluminiumblech, und 204 Druckteile, 6 Einheiten Dynamixel AX-12A, ein Dynamixel MX-64 und zwei Neun-Gramm-Teile, 3 Teile Maxonmotor 16 mm und ein Maxonmotor 22 mm, waren für die Mechanismen verantwortlich. Das Chassis bestand aus drei Maxonmotoren mit 22
mm und
60 mm Omnicholen . All dies ist mit 106 Lagern gewürzt.
Warum Dynamixel und keine Standardservos? Sie haben viele Schutzfunktionen, digitale Steuerung und viele Einstellungen, eine bequeme serielle Verbindung und im Allgemeinen eine gute Qualität. Unsere Erfahrung zeigt auch, dass sich günstige Servos pro Saison mehrmals im Kreis ändern, während teure Servos fast den gleichen Betrag kosten.

Da sich die meisten Unterlegscheiben auf dem Boden nicht in bestimmten Koordinaten befanden, sondern zufällig innerhalb einer bestimmten Zone lagen, war es schwierig, die Manipulatoren zu verwenden, weshalb ein spezieller Mechanismus zum Absorbieren von Unterlegscheiben entwickelt wurde.
Die Waschmaschinen werden in zwei Zonen entladen: auf der Waage, wo die Waschmaschinen in jede Position fallen können, und in der Beschleunigerzone, wo die Waschmaschinen in vertikaler Position angeordnet sind. Hier entlädt der Roboter im Idealfall alles in den Beschleuniger auf dem Heimfeld (das waren 90% der Fälle):
In den entscheidenden Rennen hat sich dies jedoch leider einmal durchgesetzt.
Beim Entladen in das Gaspedal können die Unterlegscheiben sofort auf einer geneigten Fläche abgeworfen und zuerst auf eine horizontale Fläche fallen gelassen und dann auf eine geneigte Fläche geschoben werden. Die zweite Option ermöglicht es Ihnen, zwei weitere Tore zu werfen und mehr Punkte zu erzielen. Daher wurde diese Option gewählt, was, wie sich später herausstellte, ein kritischer Fehler war. Es war extrem schwierig, an die Wand zu fahren, den Puck wegzuwerfen, ihn mit einer Walze wegzuwerfen und N weitere Male zu wiederholen. Die Unterlegscheiben können schief stehen, nicht beschleunigen, gegen die Wand stoßen und vor allem den Durchgang nachfolgender Unterlegscheiben blockieren.
Wie die Erfahrung von Wettbewerben und insbesondere die konstruktiven Entscheidungen anderer Teams zeigen, ist es umso besser, je einfacher die Entscheidungen in der Mechanik sind. Die derzeitige Lösung erforderte die koordinierte und fehlerbereinigte Arbeit einer großen Anzahl komplexer Mechanismen, deren Ausfall zu einer Fehlfunktion des gesamten Systems führte, und dies ist, wie
aus der Zuverlässigkeitstheorie bekannt , nicht sehr cool. Außerdem mussten die Mechaniker regelmäßig angepasst und kleinere Reparaturen durchgeführt werden, wodurch das Debuggen der Software auf dem Roboter gestoppt wurde. Wo es besser ist, einen Roboter mit einem Saugnapf an einem einzigen Verbindungshebel zu bauen, der die Unterlegscheiben auf einen Stapel legt, aber in hundert Prozent der Fälle wie vorgesehen funktioniert. Andererseits kann die Teilnahme an Wettbewerben nicht nur als Wertung angesehen werden, sondern auch als eine gute Möglichkeit, die interessantesten und coolsten technischen Lösungen zu implementieren.
Im Allgemeinen sind wir trotz der nicht sehr erfolgreichen Leistung in Frankreich mit den Ergebnissen zufrieden. Wir haben viel gelernt: Der Bereitschaftszustand einer Aufgabe ist kein binärer Parameter, die Entwicklungsgeschwindigkeit ist oft umgekehrt proportional zur Anzahl der beteiligten Personen, einfache und auf kleine Aufgaben spezialisierte Mechanismen und Module können besser als komplexe und theoretisch schöne Ideen sein. Und mach dich bereit für die neue Saison.
Videolinks und ausführlichere Überprüfung:
Offizielle Regelseite von Eurobot .
Detaillierte Überprüfung durch Team-Mentoren .
Eurobot ist nicht das Einzige, was Auszubildende im Sberbank Robotics Laboratory machen können, es gibt auch andere Praktika, zum Beispiel zur intellektuellen Manipulation von Objekten, mobilen Robotern und anthropomorpher Robotik auf der iCub-Plattform. Und Sie können gemeinsam recherchieren, ein Diplom schreiben, einen Master-Abschluss (wenn dies mit dem Thema des Labors übereinstimmt). Senden Sie Ihren Lebenslauf und Ihre Bewerbung kostenlos an robotics@sberbank.ru
Unser Telegramm:
t.me/SetUpSber