Bereits 1495 schuf Leonardo da Vinci eine Zeichnung lebender Rüstungen. Und erst nach 425 Jahren verwendete der tschechische Science-Fiction-Autor Karel Čapek in seinem Stück „RUR“ das Wort „Roboter“. Moderne Roboter sind viel intelligenter, komplexer und mobiler als der da Vinci-Roboter, haben jedoch gemeinsame Merkmale. Eines davon ist das Material, aus dem diese erstaunlichen Maschinen hergestellt werden. Wenn wir über Roboter sprechen, stellen wir uns meistens etwas Synthetisches vor, nicht ohne Grund werden in Büchern und Filmen von Robotern manchmal Kunststoffe genannt.
Roboter können jedoch nicht nur aus Metall, Kunststoff oder Kohlefaser hergestellt werden. Wissenschaftler der University of Vermont (USA) entschieden sich für die Verwendung von Froschkäfigen als Baumaterial. Die resultierenden mikroskopisch kleinen Roboter, die "Xenobots" genannt werden, können sich durch den Körper eines lebenden Organismus bewegen und ihre Aufgaben erfüllen. Wie genau haben Wissenschaftler künstliches Leben geschaffen, mit welchen Talenten können sich Xenobots rühmen, und wo kann eine solche ungewöhnliche Erfindung angewendet werden? Dies erfahren wir aus dem Bericht der Forschergruppe. Lass uns gehen.
Studienbasis
Es ist heutzutage nicht so schwierig, einen Mechanismus zu entwickeln, der einige Aufgaben unter der Kontrolle der künstlichen Intelligenz erledigt. Es ist nicht schwierig, den bestehenden Organismus durch Veränderung seiner Struktur, Funktionen oder Eigenschaften wieder aufzubauen. Es ist jedoch keine leichte Aufgabe, das Leben von Grund auf neu zu erschaffen. Forscher der Universität von Vermont sagen, dass synthetische Materialien aufgrund ihrer einfachen Herstellung, Implementierung und Integration zum größten Teil in der Robotik verwendet werden. Übertrieben gesagt, Metall kann immer geschmolzen, nachgeschmiedet oder geschärft werden. Aber lebende Organismen, Gewebe und Zellen, d.h. lebende systeme demonstrieren die stabilität von struktur und funktion. Sie sind sehr widerstandsfähig gegen äußere Einflüsse, die auf eine Verhaltensänderung abzielen.
Gleichzeitig zeigen lebende Zellen, insbesondere embryonale, erstaunliche Eigenschaften, mit denen selbst die am weitesten entwickelten synthetischen Roboter nicht aufwarten können. Embryonale Zellen sind in der Lage, sich selbst zu organisieren und je nach Situation die Prozesse der Gewebeentwicklung und -regeneration zu realisieren. Manipulationen mit dieser Fähigkeit können die Schaffung einer synthetischen Morphologie ermöglichen, durch die neue Lebensformen realisiert werden können, unabhängig davon, wie laut sie klingen. Darüber hinaus kann der Prozess der Zellenselbstorganisation überwacht werden, wodurch die zukünftige Struktur mit den erforderlichen Funktionen und Merkmalen versehen wird.
Derzeit gibt es bereits verschiedene Methoden, um individuelle Wohnsysteme zu entwickeln und zu schaffen. Zum Beispiel können einzellige Organismen mittels refaktorierter (transformierter) Genome modifiziert werden, was jedoch in mehrzelligen Systemen noch nicht implementiert werden kann.
Sie können den Zellstrang auch durch Ändern der Kulturbedingungen modifizieren. In diesem Fall ist die Kontrolle über die Prozesse sowie über Struktur und Funktionen jedoch minimal. Im Gegensatz dazu gibt es Entwicklungen im Bereich Bioengineering, bei denen dreidimensionale Frameworks untersucht werden. Diese Option bietet mehr Kontrolle. Die Unfähigkeit, das Verhalten einer willkürlichen biologischen Struktur vorherzusagen, beschränkt diese Technik jedoch auf den Zusammenbau biologischer Maschinen auf der Grundlage bestehender. Mit anderen Worten, es wird die gleiche Modifikation des bereits Vorhandenen sein, aber nicht die Schaffung eines neuen lebenden Organismus.
Trotz aller Schwierigkeiten und Hindernisse gibt es Wege. Eine davon ist die rechnergestützte Suche im Zusammenhang mit dem dreidimensionalen Drucken. Im Gegensatz zum maschinellen Lernen ist die Suche ein evolutionärer Prozess, mit dem Sie die physische Struktur einer Maschine und ihr Verhalten von Grund auf neu entwerfen können. Darüber hinaus ist diese Methode nicht an bestimmte Typen der zu erstellenden Struktur oder an bestimmte Funktionen gebunden. Mit demselben evolutionären Algorithmus können verschiedene Systeme entwickelt werden: Medikamente, Metamaterialien und sogar autonome Maschinen.
In unserer heutigen Studie haben Wissenschaftler einen skalierbaren Ansatz für den Entwurf lebender Systeme unter Verwendung eines evolutionären Algorithmus demonstriert.
 Bild Nr. 1
Bild Nr. 1Das neue Verfahren ist als Linearförderer organisiert, der die Beschreibung der verwendeten biologischen Bausteine und das gewünschte Verhalten, das das hergestellte System demonstrieren soll, als Eingabe verwendet. Der Förderer zeigt kontinuierlich Systeme für ein gesundes Leben an, die das festgelegte Verhalten auf unterschiedliche Weise umsetzen. Die resultierenden lebenden Systeme sind neue Ansammlungen von Zellen, die mit vorhandenen Organen oder Organismen sehr wenig zu tun haben.
Forschungsergebnisse
Der Förderer ist als Folge von Generatoren und Filtern organisiert. Der erste Generator ist ein evolutionärer Algorithmus, der verschiedene Möglichkeiten zur Kombination biologischer Bausteine zur Realisierung des gewünschten Verhaltens aufzeigt. Zunächst wird eine Population zufälliger Varianten zukünftiger Systemmodelle erstellt. Jedes Modell wird dann in einer virtuellen Umgebung neu erstellt, wonach automatisch eine Leistungsbewertung zugewiesen wird. Weniger produktive Modelle werden gelöscht und durch versehentlich geänderte Kopien von produktiveren Modellen überschrieben. Die Wiederholung dieses Prozesses führt zur Bildung von Populationen verschiedener und sich nicht wiederholender Muster.
Videopräsentationsdesignprozess von rekonfigurierbaren Organismen.Da es wahrscheinlich viele Unterschiede zwischen dem simulierten und dem physischen Zielmedium gibt, werden effektive Modelle durch einen Stabilitätsfilter (Zuverlässigkeitsfilter) geleitet, durch den nur diejenigen hindurchtreten können, die das gewünschte Verhalten trotz Rauschen (Änderungen in der Umgebung) unterstützen.
Überlebende geräuschresistente Modelle werden dann durch einen Baugruppenfilter geleitet, der Modelle entfernt, die für die aktuelle Montagemethode nicht geeignet sind oder in Zukunft nicht auf komplexere Aufgaben skaliert werden können. Die Herstellbarkeit hängt von der Mindestgröße der Konkavität ab, die in Clustern sich entwickelnder Stammzellen erhalten bleibt, die dazu neigen, kleine Lücken in ihrer allgemeinen Geometrie zu schließen. Die Skalierbarkeit des Modells hängt von seinem Anteil an passivem Gewebe ab, das Platz für zukünftige Organsysteme oder Nutzlasten bietet (d. H. Platz zum Halten einer transportierbaren Substanz, wie z. B. eines Arzneimittels).
 Xenopus laevis
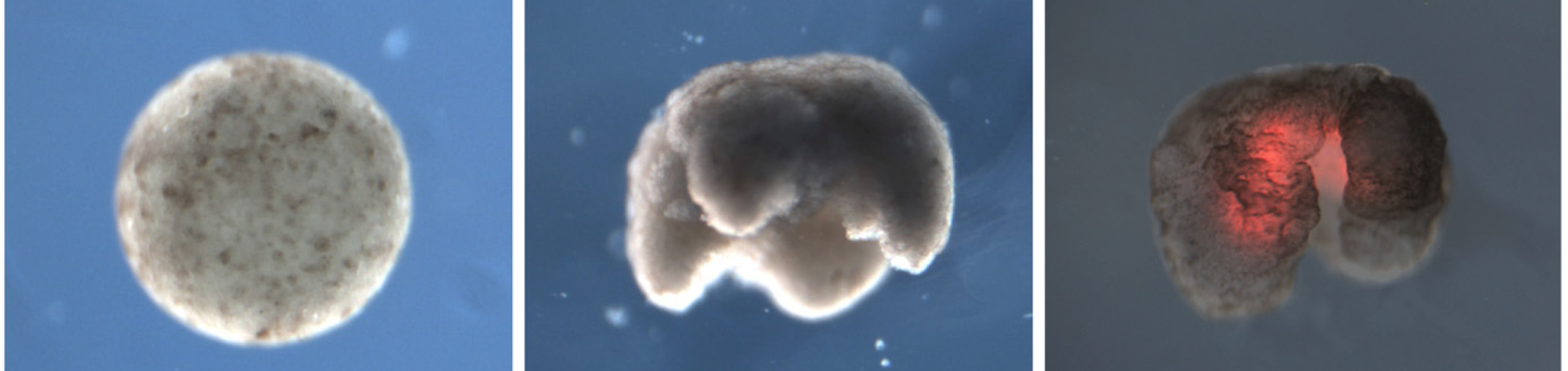
Xenopus laevisModelle, die den Filter der Baugruppe erfolgreich durchlaufen, werden dann aus lebendem Gewebe gebildet.
Pluripotente * Stammzellen werden zunächst im Blastula-Stadium aus
Xenopus laevis- Embryonen (glatter
Spornfrosch) geerntet, dann dissoziiert und kombiniert, um die gewünschte Zellzahl zu erreichen.
Pluripotente Zellen * sind in der Lage, sich in alle Arten von Zellen zu differenzieren (zu transformieren), mit Ausnahme von Zellen von Extra-Keim-Organen.
Nach der Inkubationszeit wird das aggregierte Gewebe manuell durch Subtraktion unter Verwendung einer Kombination von Pinzetten für die Mikrochirurgie und einer Kauterisationselektrode mit einer 13 & mgr; m Nadel gebildet.
Zusätzlich wird das kontraktile Gewebe auf dem Körper durch Einbringen von Vorläuferzellen des Froschherzens geschichtet, die sich auf natürliche Weise zu Kardiomyozyten (Herzmuskel) entwickeln. Diese Zellen erzeugen an bestimmten Stellen des geschaffenen Organismus kontraktile Wellen.
Das Ergebnis all dieser Manipulationen war eine dreidimensionale Live-Darstellung des Modells, das in der Lage ist, sich mehrere Tage und sogar Wochen ohne zusätzliche Nährstoffe unabhängig durch die aquatische Umgebung zu bewegen.
Videopräsentation ist der Prozess der Schaffung rekonfigurierbarer Organismen.Die resultierenden Organismen werden anschließend in die reale physische Umgebung eingeführt, um ihr Verhalten zu überwachen.
Anschließend verglichen die Wissenschaftler die Beobachtungen mit den Ergebnissen der Modellierung, um die Tatsache des Übergangs des Verhaltens von „synthetischen“ zu „organischen“ zu identifizieren.
Ein wichtiger Aspekt der Technik ist die Fortsetzung des Evolutionsalgorithmus auch nach dem Einbringen fertiger Organismen in die Umwelt. Einige von ihnen zeigen trotz ihres Nutzens in der Entwicklungsphase möglicherweise nicht genau das erwartete Verhalten. Solche Modelle von Organismen werden aus dem Algorithmus entfernt, was zur Schaffung von stabileren und umweltverträglicheren Organismen beim nächsten Mal führt.
Somit wurden 4 Durchläufe des Förderers durchgeführt. Das Ergebnis davon waren 4 Arten von Organismen, die die folgenden Merkmale zeigten: Fortbewegung, Manipulation von Objekten, Übertragung von Objekten und kollektives Verhalten. Kommen wir nun zu den einzelnen Funktionen.
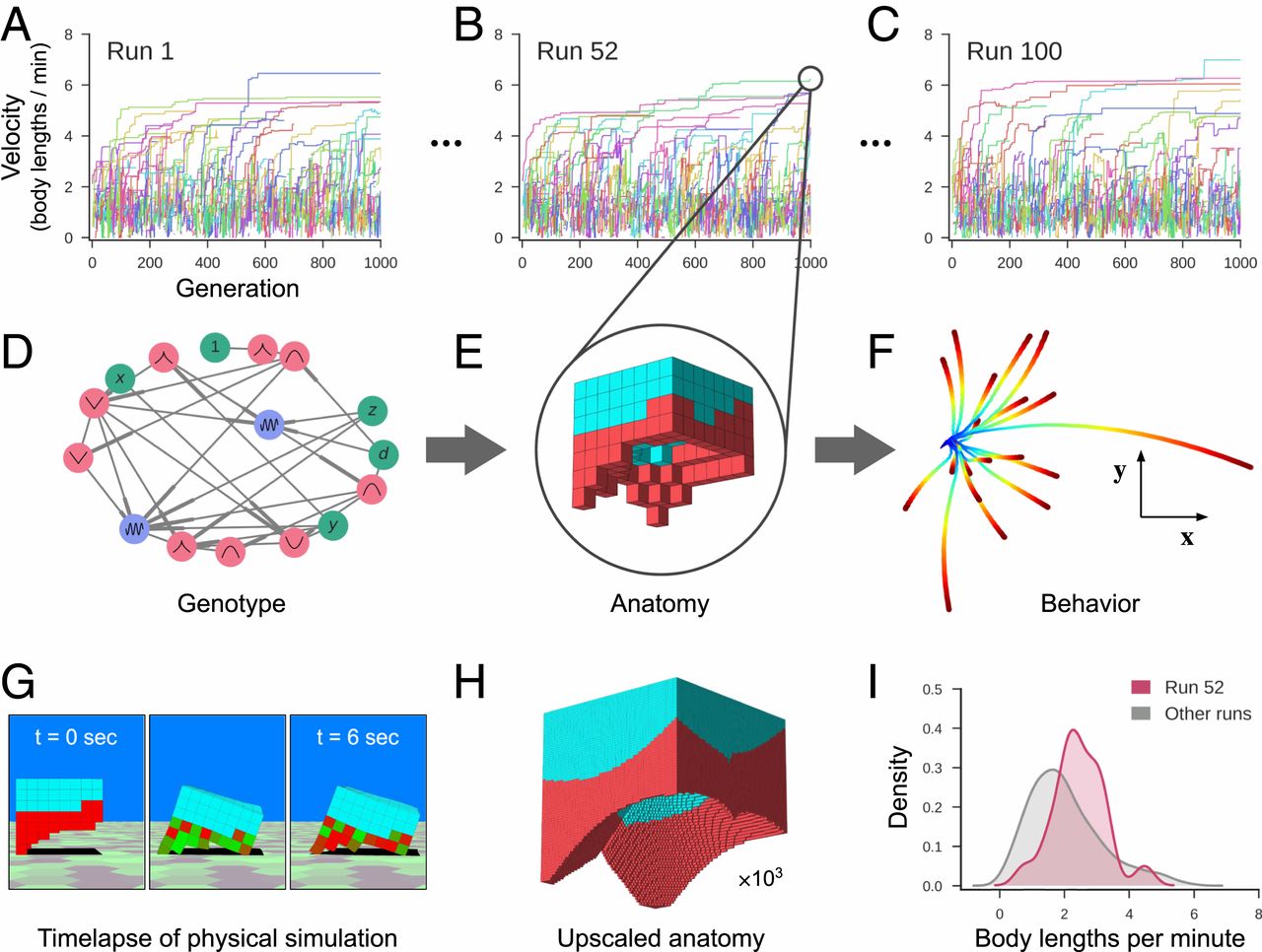 Bild Nr. 2
Bild Nr. 2Um eine Reihe verschiedener Modelle zu erhalten, wurden 100 unabhängige Tests des Evolutionsalgorithmus (
2A -
2C ) durchgeführt, von denen jeder mit einer anderen Reihe anfänglicher Zufallsmodelle begann. Während jedes Tests wurden Modelle auf der Grundlage der Nettoverschiebung (Verschiebung) ausgewählt, die über einen Zeitraum von 10 Sekunden erzielt wurde (mit einer randomisierten, phasenmodulierten Kontraktion, zyklisch bei 2 Hz). Im Verlauf jedes Tests wurden zusätzliche Selektionsparameter in Form eines stimulierenden Wettbewerbs innerhalb und zwischen einzigartigen genetischen Linien angewendet, was zur Bildung einer einzigartigen Umweltdynamik führte. Am Ende jedes Tests wurden die am besten geeigneten Modelle entfernt (
1A ) und durch Stabilitätsfilter und -anordnungen geführt. Bei dieser Filterung wurden diejenigen Modelle ausgewählt, die während des Skalierens und Aufbaus eine schnelle Fortbewegung bewahrten (Bild Nr. 3).
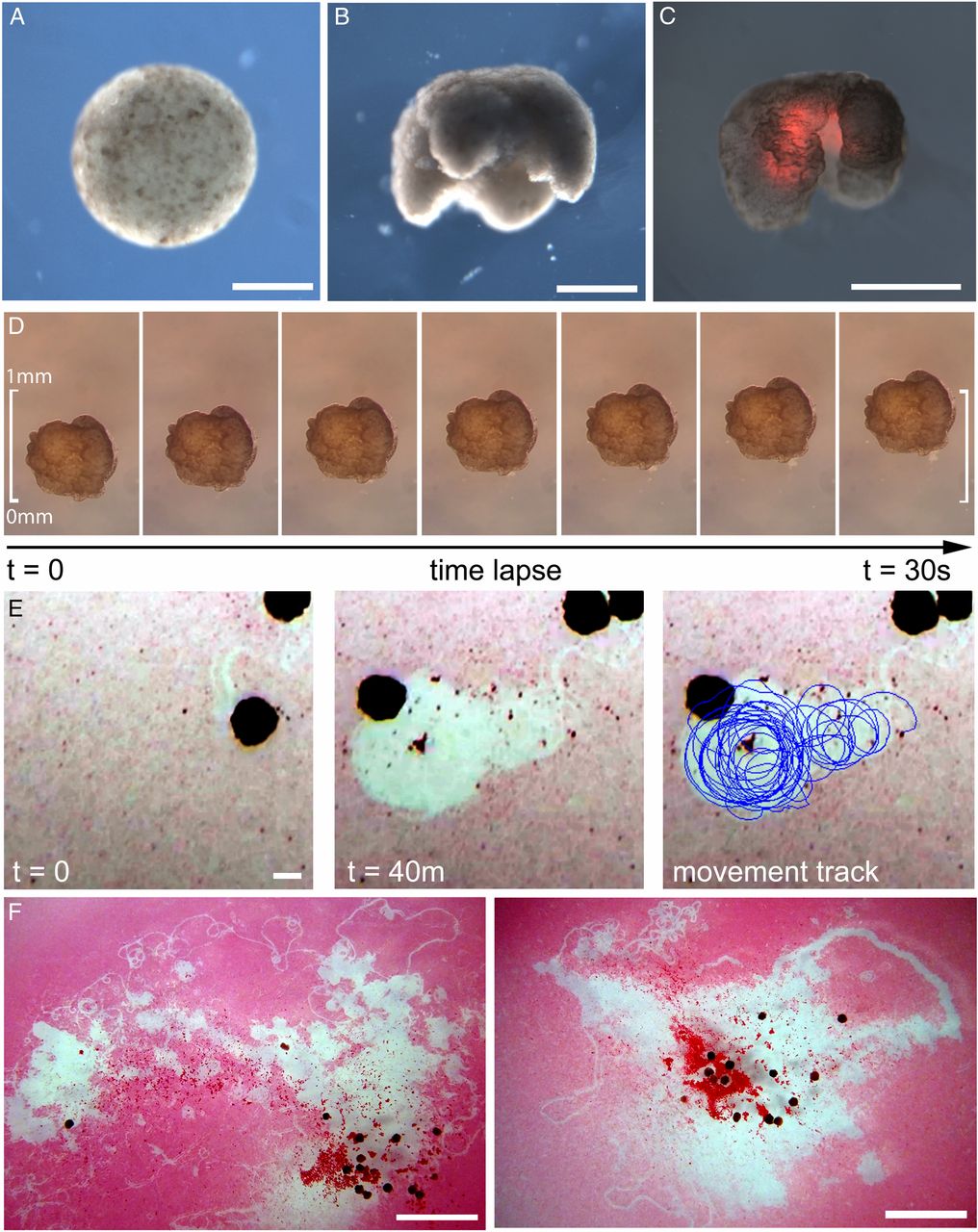 Bild Nr. 3
Bild Nr. 3Es ist erwähnenswert, dass Zilien (Zilien, dünne Haare auf der Zelloberfläche) während des Designprozesses nicht modelliert und in praktischen Tests durch embryonale Mikroinjektion von mRNA, die die intrazelluläre Domäne von Notch transkribiert, unterdrückt wurden. Somit wurden alle Bewegungen der Organismen ausschließlich durch die Reduktion von Herzmuskelgewebe durchgeführt.
Die Flugbahnen von simulierten und realisierten decylierten (ohne Zilien) Organismen wurden in zwei Orientierungen verglichen: vertikal und invertiert, d.h. um 180 ° gegenüber der Querebene gedreht. Beobachtungen zeigten, dass mindestens eine der Varianten der Körpermodelle das vorgegebene Verhalten in vertikaler Ausrichtung, jedoch nicht in invertierter, erfolgreich umsetzte (Bild Nr. 4).
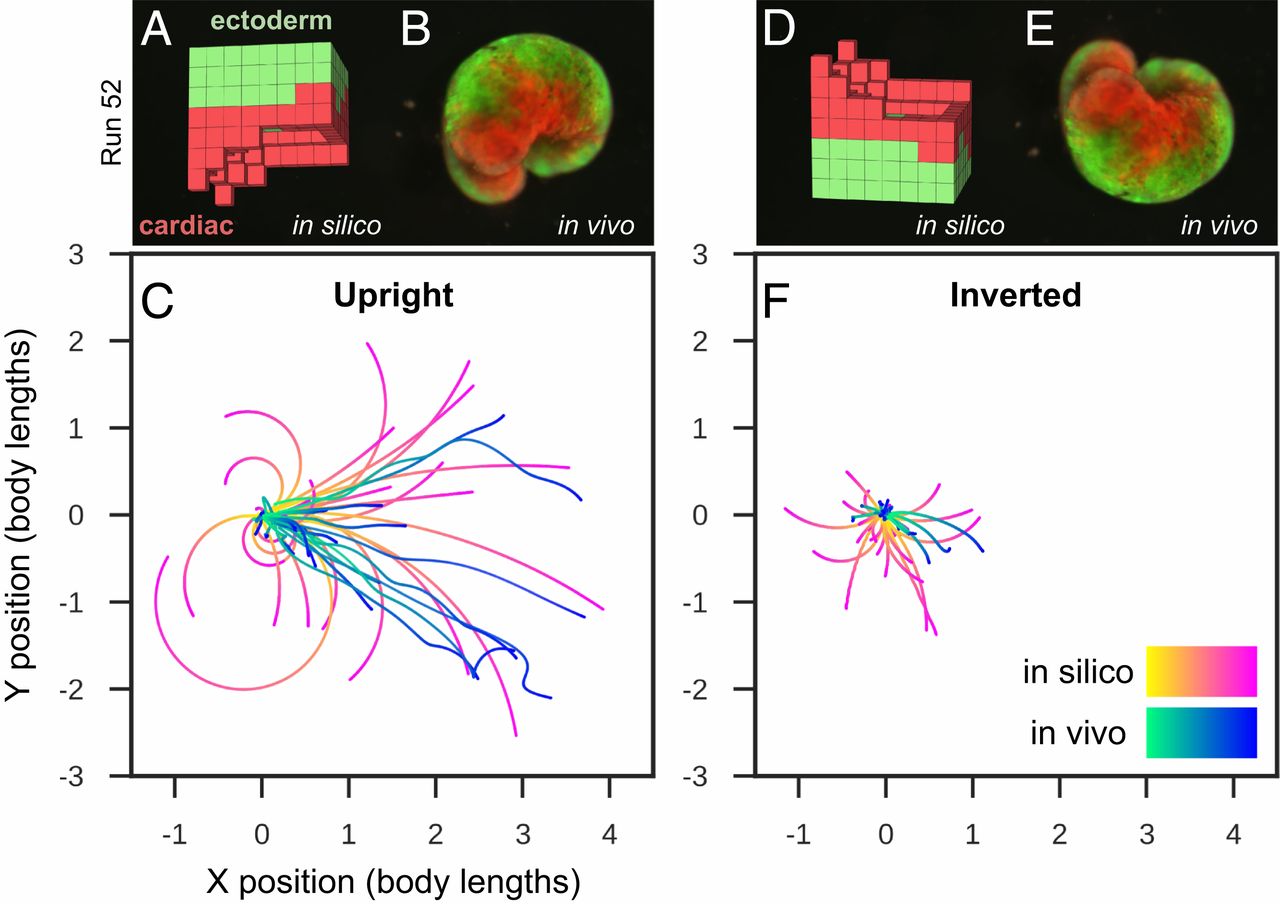 Bild Nr. 4
Bild Nr. 4Die Bewegungsrichtung von Organismen mit vertikaler Ausrichtung stimmte mit der Richtung des Modells bei zufälligen Störungen überein. Dies legt nahe, dass eine erfolgreiche Bewegung im Raum nicht zufällig ist, sondern das Ergebnis der Gestaltung des Modells des Organismus selbst ist.
Das zweite Merkmal ist die Manipulation von Objekten. Wenn sich feste Partikel in der Umgebung der Testorganismen befanden, begannen sich diese spontan mit ihnen zu verbinden, sowohl in der Modellierung als auch in der Praxis (
3F ).
Dieses Verhalten ist kaum als strukturiert zu bezeichnen, da die notwendigen Taskparameter nicht gesetzt wurden. Dies kann genauer realisiert werden, indem genauere Daten hinzugefügt werden: Geben Sie beispielsweise den Bereich an, der von Partikeln gereinigt werden muss, oder geben Sie einen bestimmten Partikeltyp an, der entfernt werden muss, während Sie alle anderen ignorieren. Das zweite Verhalten wurde implementiert, aber bisher auf einer primitiven Ebene.
Im nächsten Schritt wurden Organismen getestet, die die Fähigkeit zum Transport von Gegenständen zeigten. Einige der Organismen wurden entwickelt, um den hydrodynamischen Widerstand durch ein Loch in der Mitte ihrer Querebene zu verringern. In diesem Bereich des Körpers befanden sich jedoch keine kontraktilen Gewebe.
Dieses Loch kann während der nachfolgenden Zyklen des Evolutionsalgorithmus in eine Art Beutel zum Übertragen von Objekten umgewandelt werden, der zur lokalen Abgabe von Arzneimitteln verwendet werden kann.
Ein weiteres Merkmal ist das kollektive Verhalten. Während der praktischen Durchführung wurde eine Kollision zweier Organismen beobachtet, die zur Bildung einer temporären mechanischen Verbindung führte. Diese beiden Organismen beginnen sich umeinander zu drehen und trennen sich nach einigen Umdrehungen wieder entlang der tangentialen Trajektorien. Ein solches Verhalten ist viel ausgeprägter, wenn Sie die Entwicklung von Zilien nicht unterdrücken, da sie zu einer "Verflechtung" der beiden Organismen miteinander führen, d. H. Ihre Verbindung wird viel länger.
Um die Nuancen der Studie genauer kennenzulernen, empfehle ich, dass Sie sich den
Bericht der Wissenschaftler und
weitere Materialien dazu ansehen.
Nachwort
Diese Studie ist angesichts ihrer Ergebnisse nicht schwer als einzigartig zu bezeichnen. Wissenschaftler nahmen Froschzellen und schufen daraus neue vielzellige Organismen, die bestimmte Funktionen mit unterschiedlichem Erfolg ausführen. Sogar die Autoren dieser Arbeit verstehen, dass viele von ihnen Angst vor autonomen, etwas denkenden Robotern haben, geschweige denn vor neuen Lebensformen. Ihrer Meinung nach ermöglicht diese Studie jedoch ein besseres Verständnis des Lebens selbst als Phänomen. Darüber hinaus können die entwickelten Xenobots in der Medizin eingesetzt werden, um lebende Nano-Chirurgen zu werden, schädliche und pathogene Zellen aus dem Körper des Patienten oder Nano-Kuriere von Arzneimitteln zu entfernen und sie direkt dorthin zu befördern, wo sie die Krankheit am effektivsten bekämpfen.
Das Leben in all seinen Formen und Erscheinungsformen ist trotz aller Mängel einwandfrei. Jedes Lebewesen hat sich entwickelt, um sich an veränderte Lebensbedingungen anzupassen. Die moderne Wissenschaft ist in der Lage, Leben zu schaffen, jedoch nur im Rahmen der Veränderung bestehender Organismen. Aber etwas Neues von Grund auf zu schaffen, ist eine völlig andere Aufgabe, schwieriger, ehrgeiziger. Es gibt Beispiele für künstlich geschaffene Organismen, aber sie können nicht mit denen verglichen werden, die von Science-Fiction-Autoren beschrieben wurden. Trotzdem hören Wissenschaftler aus aller Welt nicht auf zu forschen, um eine neue Lebensform zu schaffen. Es ist immer noch schwer zu sagen, wie gefährlich es ist, mit der Natur zu spielen. Nach Ansicht von Science-Fiction-Autoren werden solche Entdeckungen jedoch nicht zum Guten führen. Dennoch sind Werke der Science-Fiction-Literatur, obwohl sie in vielerlei Hinsicht die Zukunft der Gesellschaft im Allgemeinen und der Wissenschaft im Besonderen vorhersagen, nur die Erfindung der Vorstellungskraft des Autors. Wie genau die aktuell entwickelten Technologien, einschließlich Xenobots, eingesetzt werden, hängt ausschließlich von uns selbst ab.
Vielen Dank für Ihre Aufmerksamkeit, bleiben Sie neugierig und haben Sie ein tolles Wochenende, Jungs! :)
Ein bisschen Werbung :)
Vielen Dank für Ihren Aufenthalt bei uns. Mögen Sie unsere Artikel? Möchten Sie weitere interessante Materialien sehen? Unterstützen Sie uns, indem Sie eine Bestellung
aufgeben oder Ihren Freunden
Cloud-basiertes VPS für Entwickler ab 4,99 US-Dollar empfehlen, ein
einzigartiges Analogon zu Einstiegsservern, das wir für Sie erfunden haben: Die ganze Wahrheit über VPS (KVM) E5-2697 v3 (6 Kerne) 10 GB DDR4 480 GB SSD 1 Gbit / s ab 19 Dollar oder wie teilt man den Server? (Optionen sind mit RAID1 und RAID10, bis zu 24 Kernen und bis zu 40 GB DDR4 verfügbar).
Dell R730xd 2-mal billiger im Equinix Tier IV-Rechenzentrum in Amsterdam? Nur wir haben
2 x Intel TetraDeca-Core Xeon 2 x E5-2697v3 2,6 GHz 14C 64 GB DDR4 4 x 960 GB SSD 1 Gbit / s 100 TV ab 199 US-Dollar in den Niederlanden! Dell R420 - 2x E5-2430 2,2 GHz 6C 128 GB DDR3 2x960 GB SSD 1 Gbit / s 100 TB - ab 99 US-Dollar! Lesen Sie mehr über
das Erstellen von Infrastruktur-Bldg. Klasse mit Dell R730xd E5-2650 v4 Servern für 9.000 Euro für einen Cent?