Um genügend Trainingsdaten für Robomobile zu erhalten, müssen Sie keine Menschenmengen verwenden, die Videos manuell markieren

Nachdem Sie ein Buch zu einem bestimmten Thema gelesen haben, werden Sie kein Experte dafür. Wie kannst du nicht zu ihm werden, wenn du viel über die gleichen Bücher liest? Um ein echter Profi auf jedem Wissensgebiet zu werden, ist es notwendig, eine große Menge an Informationen aus verschiedenen Quellen zu sammeln.
Gleiches gilt für Robomobile und andere auf KI basierende Technologien.
Die tiefen neuronalen Netze, die für den Betrieb des Robomobils verantwortlich sind, erfordern eine umfassende Schulung. Sie müssen sowohl die Situationen untersuchen, denen sie unter alltäglichen Bedingungen begegnen können, als auch die ungewöhnlichen Fälle, denen sie niemals begegnen müssen, wenn sie Glück haben. Der Schlüssel zum Erfolg besteht darin, sicherzustellen, dass sie mit den richtigen Daten geschult sind.
Aber was sind geeignete Daten? Dies sind neue oder ungewisse Situationen und keine ständige Wiederholung derselben.
Aktives Lernen ist eine Methode zur Auswahl von Lerndaten für maschinelles Lernen, bei der diese unterschiedlichen Daten automatisch gefunden werden. Darüber hinaus sammelt er Datensätze für einen kleinen Bruchteil der Zeit, die Menschen für diese Aufgabe benötigen würden.
Es arbeitet mit Hilfe eines trainierten Modells, das die gesammelten Daten durchläuft und die Frames markiert, bei deren Erkennung es Schwierigkeiten hatte. Dann werden diese Frames von Personen markiert. Dann werden sie zu den Trainingsdaten hinzugefügt. Dies erhöht die Genauigkeit des Modells in Situationen wie der Objekterkennung unter schwierigen Bedingungen.
So suchen Sie nach einer Nadel in einem Datenstapel
Die Datenmenge, die zum Trainieren eines Robomobils benötigt wird, ist ungeheuerlich. Experten
der RAND Corporation gehen davon aus, dass das Auto 17 Milliarden Kilometer zurücklegen muss, um die Genauigkeit der Person um 20% zu übertreffen. Dazu müsste eine Flotte von 100 Autos in der realen Welt 500 Jahre lang ununterbrochen fahren.
Darüber hinaus sind nicht alle Daten, die beim Fahren auf der Straße erhalten werden, für diese Aufgabe geeignet. Effektive Trainingsdaten müssen vielfältige und komplexe Bedingungen enthalten, um eine sichere Fahrt zu gewährleisten.
Wenn die Leute diese Daten durchsuchen und markieren würden, dann würde die Verarbeitung der Daten, die von einer Flotte von 100 Autos empfangen werden, die 8 Stunden am Tag unterwegs sind, die Arbeit von mehr als einer Million Markierern erfordern, die Daten von allen Kameras aller Autos markieren müssen - eindeutig eine unmögliche Aufgabe. Abgesehen von den Personalkosten wäre die Zuweisung von Ressourcen für die Datenspeicherung und das Rechnen mit neuronalen Netzen unpraktisch.
Die Kombination aus Markup und Datenfreigabe stellt die Entwicklung von Robomobilen vor eine große Herausforderung. Indem Sie KI auf diesen Prozess anwenden, können Sie Zeit und Geld für das Training sparen und gleichzeitig die Genauigkeit neuronaler Netze erhöhen.
Warum aktives Lernen?
Es gibt drei übliche Methoden zum Auswählen von Daten zum Trainieren neuronaler Netze von Robomobilen. Durch die zufällige Stichprobe werden in regelmäßigen Abständen Frames aus der Datenbank ausgewählt. Dies beschreibt die häufigsten Szenarien, es ist jedoch wahrscheinlich, dass seltene Fälle übersehen werden.
Bei der auf Metadaten basierenden Stichprobe werden Basisetiketten (z. B. „Regen“, „Nacht“) zum Erfassen von Daten verwendet, um das Auffinden häufig auftretender schwieriger Situationen zu vereinfachen. Es fehlen jedoch auch eindeutige Rahmen, die nicht einfach einzuordnen sind, z. B. ein Anhänger mit einem Traktor oder eine Person mit Jumpern die Straße überqueren.
 Vergleich der üblichen Szene auf der Autobahn (oben links) mit ungewöhnlichen Szenarien: ein Nachtradfahrer am Hinterrad, ein Pickup mit einem Anhänger mit einem Anhänger, ein Fußgänger mit Springern.
Vergleich der üblichen Szene auf der Autobahn (oben links) mit ungewöhnlichen Szenarien: ein Nachtradfahrer am Hinterrad, ein Pickup mit einem Anhänger mit einem Anhänger, ein Fußgänger mit Springern.Schließlich werden beim manuellen Sampling Metadaten-Tags zusammen mit der Anzeige von Frames verwendet. Eine solche Aufgabe ist zeitaufwändig, fehleranfällig und lässt sich nicht gut skalieren.
Durch aktives Lernen können Sie die Auswahl von Frames automatisieren und gleichzeitig wertvolle Referenzpunkte in den Daten auswählen. Es beginnt mit dem Training eines speziellen neuronalen Netzwerks auf bereits beschrifteten Daten. Danach verarbeitet das Netzwerk nicht zugewiesene Daten und wählt Frames aus, die es nicht erkennen kann. Daher sucht es nach Daten, die für den Roboterfahrzeugalgorithmus schwierig sein werden. Anschließend werden diese Daten von Personen untersucht, markiert und der Trainingsdatenbank hinzugefügt.
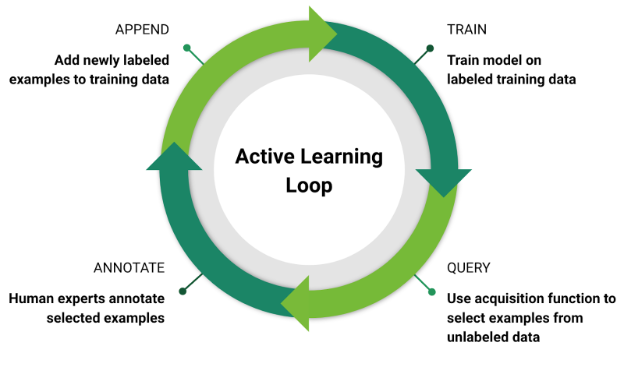 Regelkreis des aktiven Lernens: Um ein Modell für gekennzeichnete Daten zu trainieren, treffen Sie eine Auswahl nicht zugeordneter Daten, markieren Sie ausgewählte Daten mit menschlicher Arbeit und fügen Sie der Datenbank neue gekennzeichnete Daten hinzu. wiederhole.
Regelkreis des aktiven Lernens: Um ein Modell für gekennzeichnete Daten zu trainieren, treffen Sie eine Auswahl nicht zugeordneter Daten, markieren Sie ausgewählte Daten mit menschlicher Arbeit und fügen Sie der Datenbank neue gekennzeichnete Daten hinzu. wiederhole.Das aktive Training hat bereits seine Fähigkeit gezeigt, die Genauigkeit des Betriebs neuronaler Netze von Robomobilen im Vergleich zum manuellen Hinzufügen von Daten zu erhöhen. In unserer
Studie haben wir festgestellt, dass die Genauigkeitssteigerung bei aktivem Training die Genauigkeitssteigerung bei manueller Datenerfassung um das 3-fache für die Fußgängererkennung und um das 4,4-fache für Radfahrer übersteigt.
Gleichzeitig arbeiten fortgeschrittene Trainingsmethoden für neuronale Netze wie aktives Lernen,
Transferlernen und
kollaboratives Lernen am effizientesten auf einer zuverlässigen und skalierbaren Infrastruktur, mit der Sie gleichzeitig große Datenmengen verarbeiten und den Entwicklungszyklus verkürzen können. Zugriff auf solche Kapazitäten bietet das
NVIDIA-GPU-Cloud- Projekt, in dem sowohl die genannten Trainingstools als auch eine große Bibliothek von tiefen neuronalen Netzen für Robomobile zur Verfügung stehen.