Cómo DRC-HUBO de Corea del Sur gana el DARPA Robotics Challenge
 El sábado, el equipo del Instituto Coreano de Ciencia y Tecnología (KAIST) de Corea del Sur ganó el DARPA Robotics Challenge (DRC) en Pomona, California, cuando su robot, el humanoide adaptable DRC-HUBO , derrotó a otros 22 robots de cinco países diferentes y ganó el premio principal en efectivo de $ 2 millones.
El sábado, el equipo del Instituto Coreano de Ciencia y Tecnología (KAIST) de Corea del Sur ganó el DARPA Robotics Challenge (DRC) en Pomona, California, cuando su robot, el humanoide adaptable DRC-HUBO , derrotó a otros 22 robots de cinco países diferentes y ganó el premio principal en efectivo de $ 2 millones. La capacidad de transformar de un robot andante de dos patas a un automóvil con ruedas jugó un papel importante para recibir el premio. Muchos robots perdieron el equilibrio y cayeron al suelo, abriendo la puerta o trabajando con un taladro. Pero no DRC-HUBO . El diseño único le permitió completar tareas más rápido y, lo que es más importante, mantenerse de pie (y ruedas).
La capacidad de transformar de un robot andante de dos patas a un automóvil con ruedas jugó un papel importante para recibir el premio. Muchos robots perdieron el equilibrio y cayeron al suelo, abriendo la puerta o trabajando con un taladro. Pero no DRC-HUBO . El diseño único le permitió completar tareas más rápido y, lo que es más importante, mantenerse de pie (y ruedas).El movimiento de dos patas [para los robots] todavía no es estable ”, dijo Rong Ho O, profesor de ingeniería mecánica en el instituto científico y técnico líder de Corea y jefe del equipo KAIST. - Si uno de ellos funciona incorrectamente, el resultado puede ser catastrófico.
 Dijo que el robot humanoide tiene ventajas cuando trabaja en una sociedad de personas, pero quería desarrollar un diseño que minimizara el riesgo de caídas: "Pensé en muchas cosas, y lo más simple fueron las ruedas sobre mis rodillas".DRC-HUBO puede cambiar la postura, pararse sobre dos piernas, caminar, alcanzar objetos que están altos y también moverse en una posición más estable, de rodillas.DARPA decidió organizar la RDC después del incidente de Fukushima en Japón, con la esperanza de avanzar en el campo de la robótica. A la competencia de las Finales de la RDCSe invitó a equipos que desarrollan robots semiautónomos, y los operadores humanos tuvieron que trabajar juntos para modelar las condiciones del desastre. Los robots creados por universidades y empresas para la competencia eran muy diferentes en tamaño y forma, entre ellos hay robots con patas, ruedas e híbridos.
Dijo que el robot humanoide tiene ventajas cuando trabaja en una sociedad de personas, pero quería desarrollar un diseño que minimizara el riesgo de caídas: "Pensé en muchas cosas, y lo más simple fueron las ruedas sobre mis rodillas".DRC-HUBO puede cambiar la postura, pararse sobre dos piernas, caminar, alcanzar objetos que están altos y también moverse en una posición más estable, de rodillas.DARPA decidió organizar la RDC después del incidente de Fukushima en Japón, con la esperanza de avanzar en el campo de la robótica. A la competencia de las Finales de la RDCSe invitó a equipos que desarrollan robots semiautónomos, y los operadores humanos tuvieron que trabajar juntos para modelar las condiciones del desastre. Los robots creados por universidades y empresas para la competencia eran muy diferentes en tamaño y forma, entre ellos hay robots con patas, ruedas e híbridos.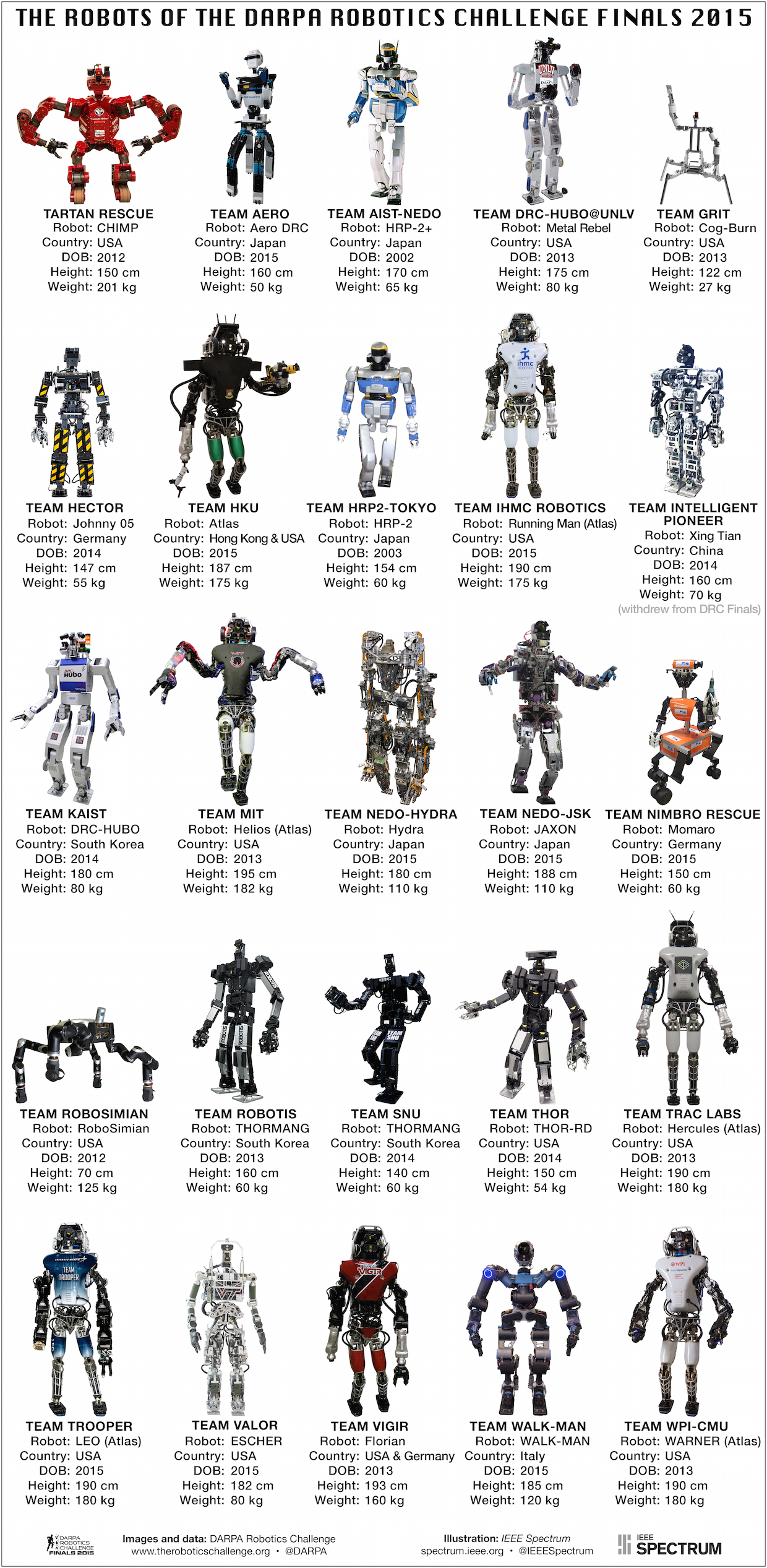 DRC-HUBO se convirtió en un ganador porque pudo completar las ocho tareas sin errores en el menor tiempo (44 min. 28 s). Otros equipos también tuvieron un buen desempeño, pero sus robots perdieron tiempo debido a demoras. Entre los mejores están el equipo de Tartan Rescue , su CHIMP es un robot con patas y orugas, que pudo volver a las tareas después de la caída; Momarodel equipo de la Universidad de Bonn: un automóvil simple y elegante sobre ruedas, con una cabeza giratoria y dos manos; RoboSimian del Laboratorio de Propulsión a Chorro de la NASA, con cuatro patas y movimientos similares al yoga; ATLAS del equipo IHMC es un gran robot humanoide eléctrico desarrollado por Boston Dynamics .
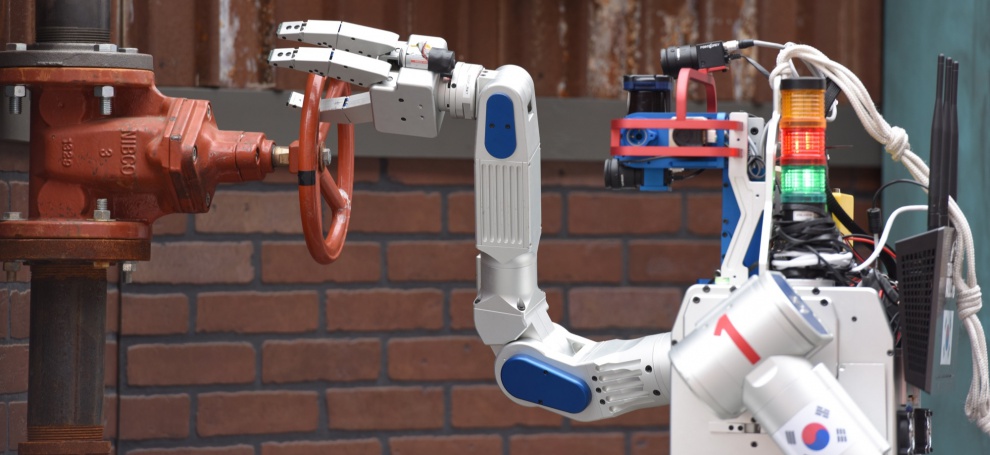
DRC-HUBO se convirtió en un ganador porque pudo completar las ocho tareas sin errores en el menor tiempo (44 min. 28 s). Otros equipos también tuvieron un buen desempeño, pero sus robots perdieron tiempo debido a demoras. Entre los mejores están el equipo de Tartan Rescue , su CHIMP es un robot con patas y orugas, que pudo volver a las tareas después de la caída; Momarodel equipo de la Universidad de Bonn: un automóvil simple y elegante sobre ruedas, con una cabeza giratoria y dos manos; RoboSimian del Laboratorio de Propulsión a Chorro de la NASA, con cuatro patas y movimientos similares al yoga; ATLAS del equipo IHMC es un gran robot humanoide eléctrico desarrollado por Boston Dynamics .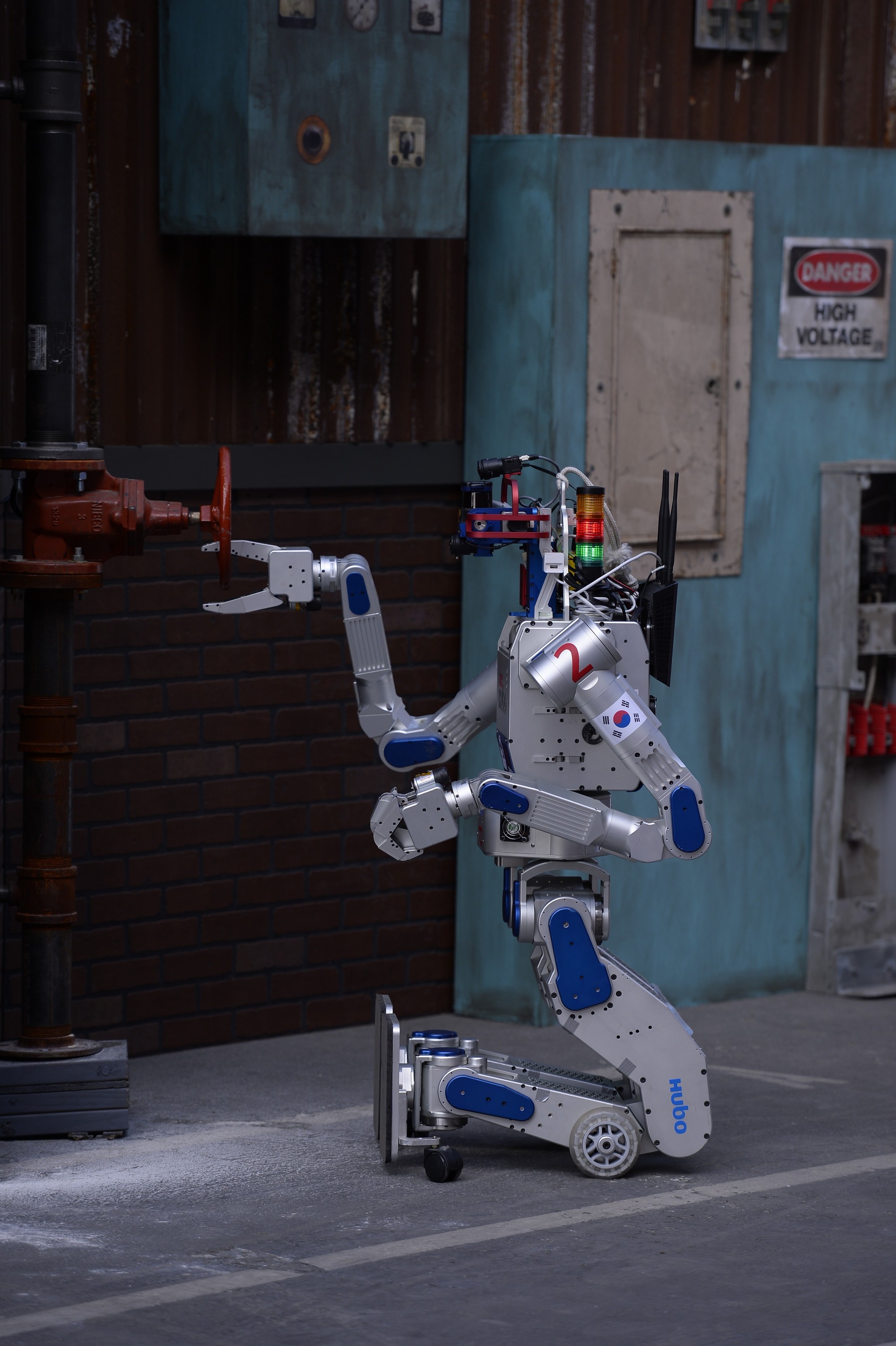 DRC-HUBO realiza la tarea de cerrar la válvula. Observe que su torso está girado 180 grados.
DRC-HUBO realiza la tarea de cerrar la válvula. Observe que su torso está girado 180 grados.La flexibilidad es lo más importante ”, dijo la gerente de DARPA y organizadora de la RDC, Jill Pratt, en una reunión con periodistas que comentaron sobre el diseño de los robots. "Un robot que puede cambiar la configuración de usar patas a usar ruedas puede tener una estructura más compleja y más peso, pero le dará esa flexibilidad".
El profesor O es un experto reconocido internacionalmente en robots humanoides. Él y sus estudiantes de KAIST en Daejeon, Corea del Sur, han estado mejorando su plataforma HUBO por generaciones. A continuación se muestra un video que ya tiene varios años: entonces el Profesor O demostró HUBO 2:Para las Finales de la RDC, decidió modificar significativamente el robot para prepararlo para posibles tareas. En la clase magistral después de la competencia, el profesor O dijo que el DRC-HUBO "no es diferente, es solo un robot humanoide". Pero, de hecho, su equipo de KAIST resolvió cuidadosamente cada detalle. Calculó el costo de cada robot en aproximadamente $ 500,000 y $ 1 millón. A continuación se presentan las características principales que ayudaron a DRC-HUBO a hacer frente a las tareas:1. Ruedas de rodillas: DRC-HUBOTiene ruedas en ambas rodillas y rodillos en las piernas. Las ruedas permiten que el robot se mueva de manera rápida y constante. Moviéndose en el suelo, usa sensores ópticos en sus espinillas para medir la distancia usando flujo óptico. 2. Motores potentes: al igual que SCHAFT , el robot que ganó la competencia preliminar de DARPA y adquirido por Google , DRC-HUBO tiene motores muy potentes (tiene 33 de ellos, con 31 grados de movimiento libre). Gracias a los motores especializados y a un sistema de refrigeración por aire (ventiladores y aspas), el robot puede usar voltaje 3-4 veces más de lo especificado en la especificación del motor, con un valor máximo de 30 amperios en algunos casos.3. Compatibilidad: el equipo quería hacer que el robot fuera compatible sin el uso de sensores de torque y el controlador automático habitual (temían que esto condujera a la inestabilidad). Por lo tanto, al usar un amplificador especial, el problema de compatibilidad se transfirió al controlador del motor.
2. Motores potentes: al igual que SCHAFT , el robot que ganó la competencia preliminar de DARPA y adquirido por Google , DRC-HUBO tiene motores muy potentes (tiene 33 de ellos, con 31 grados de movimiento libre). Gracias a los motores especializados y a un sistema de refrigeración por aire (ventiladores y aspas), el robot puede usar voltaje 3-4 veces más de lo especificado en la especificación del motor, con un valor máximo de 30 amperios en algunos casos.3. Compatibilidad: el equipo quería hacer que el robot fuera compatible sin el uso de sensores de torque y el controlador automático habitual (temían que esto condujera a la inestabilidad). Por lo tanto, al usar un amplificador especial, el problema de compatibilidad se transfirió al controlador del motor.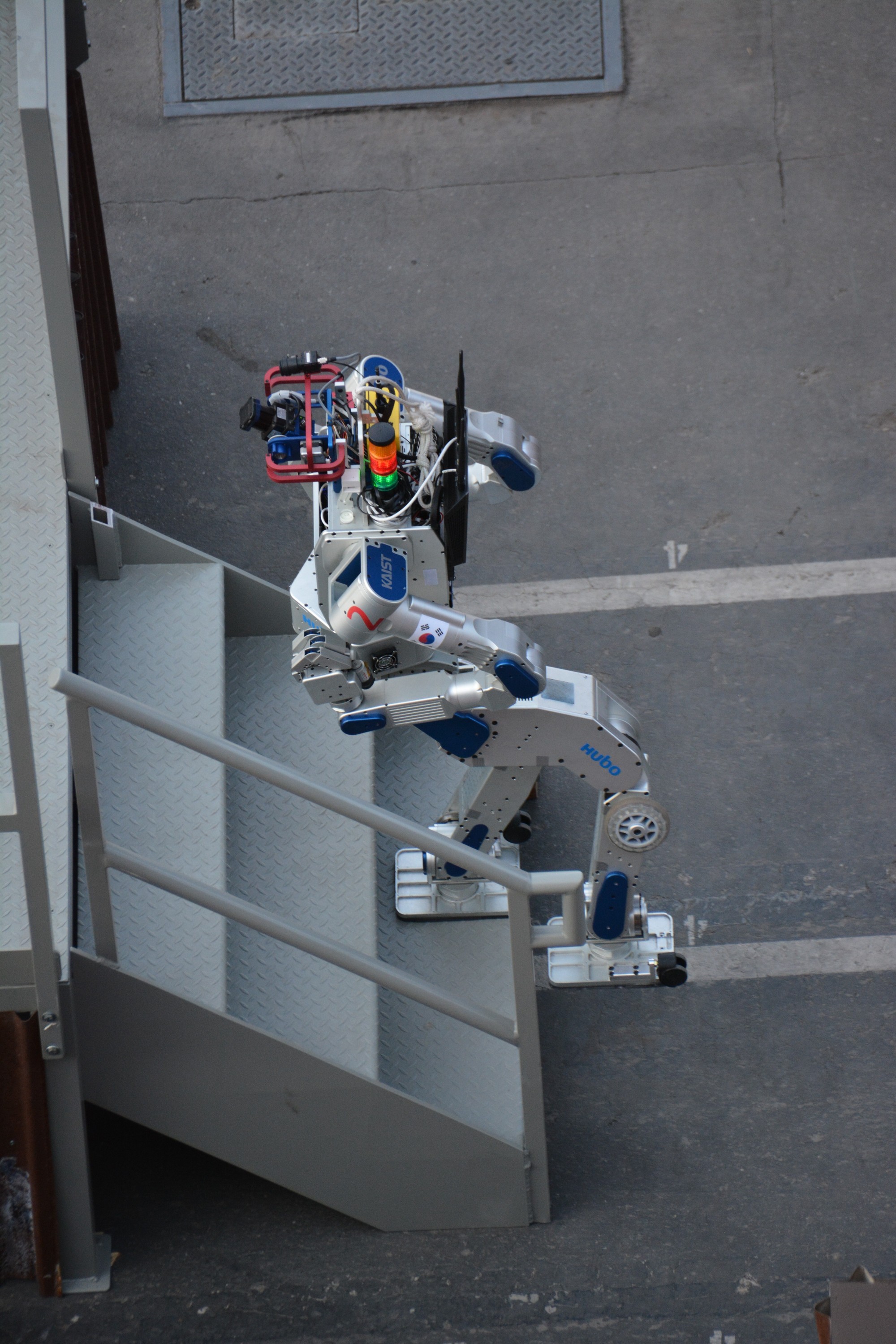 4. Torso giratorio: DRC-HUBO puede girar su cuerpo superior 180 grados. Esto significa que las rodillas del robot se pueden girar en una dirección, mientras que él puede mirar en la dirección opuesta (¡pruébalo tú mismo!). Esta habilidad funciona no solo cuando está de pie, sino también cuando está de rodillas. El robot aprovechó esta oportunidad en varias tareas cuando fue necesario: conducir un vehículo, perforar una pared, moverse entre los escombros y subir escaleras.5. Brazos largos: los miembros del equipo KAIST se dieron cuenta de que los brazos HUBO 2 eran demasiado cortos para algunas tareas, por lo que hicieron brazos más largos, girando 7 grados. También escondieron todos los cables hacia adentro para que no se aferraran a los objetos circundantes. Cada mano puede sostener un peso de hasta 15 kg, y también tiene una "pinza adaptable" que puede agarrar objetos duros y blandos.
4. Torso giratorio: DRC-HUBO puede girar su cuerpo superior 180 grados. Esto significa que las rodillas del robot se pueden girar en una dirección, mientras que él puede mirar en la dirección opuesta (¡pruébalo tú mismo!). Esta habilidad funciona no solo cuando está de pie, sino también cuando está de rodillas. El robot aprovechó esta oportunidad en varias tareas cuando fue necesario: conducir un vehículo, perforar una pared, moverse entre los escombros y subir escaleras.5. Brazos largos: los miembros del equipo KAIST se dieron cuenta de que los brazos HUBO 2 eran demasiado cortos para algunas tareas, por lo que hicieron brazos más largos, girando 7 grados. También escondieron todos los cables hacia adentro para que no se aferraran a los objetos circundantes. Cada mano puede sostener un peso de hasta 15 kg, y también tiene una "pinza adaptable" que puede agarrar objetos duros y blandos.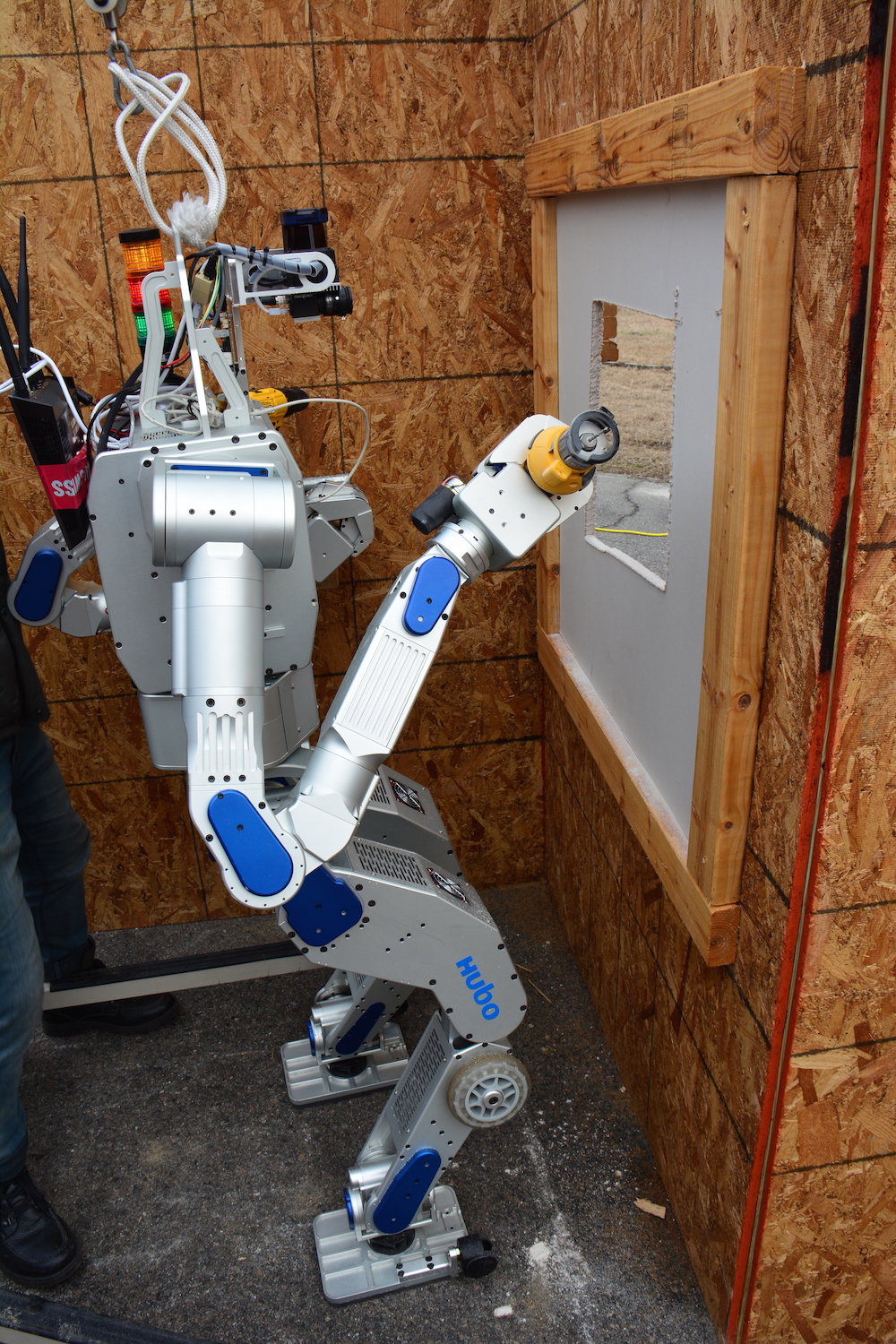 6. Detección simplificada: en lugar de llenar la cabeza con sensores, cámaras estereoscópicas y lidares que escanean constantemente el entorno (esta tecnología utiliza el robot ATLAS , por ejemplo), DRC-HUBOtiene un sistema de visión simplificado; los operadores confían en una cámara convencional la mayor parte del tiempo, y un lidar conectado a un servocontrolador escanea el entorno solo cuando es necesario. De hecho, el robot no tiene cabeza: “solo ojos”, señaló uno de los estudiantes de KAIST .7. Potencia: cuando los motores requieren alta potencia, el sistema de potencia principal puede no ser capaz de proporcionar suficiente energía a los componentes importantes de la máquina. Para evitar esto, el equipo utilizó un supercondensador, que suministra energía a las computadoras, canales de transmisión y algunos sensores y giroscopios, incluso si falla el sistema de alimentación principal.8. Software especial: el equipo usa el sistema operativo Xenomai en tiempo real para Linux y un marco de control de movimiento especial llamado PODO (desarrollado por KAIST ). También aprovechan el entorno de simulación Gazebo. El equipo desarrolló su software con un enfoque en el ancho de banda bajo y la comunicación inestable entre los operadores y el robot.
6. Detección simplificada: en lugar de llenar la cabeza con sensores, cámaras estereoscópicas y lidares que escanean constantemente el entorno (esta tecnología utiliza el robot ATLAS , por ejemplo), DRC-HUBOtiene un sistema de visión simplificado; los operadores confían en una cámara convencional la mayor parte del tiempo, y un lidar conectado a un servocontrolador escanea el entorno solo cuando es necesario. De hecho, el robot no tiene cabeza: “solo ojos”, señaló uno de los estudiantes de KAIST .7. Potencia: cuando los motores requieren alta potencia, el sistema de potencia principal puede no ser capaz de proporcionar suficiente energía a los componentes importantes de la máquina. Para evitar esto, el equipo utilizó un supercondensador, que suministra energía a las computadoras, canales de transmisión y algunos sensores y giroscopios, incluso si falla el sistema de alimentación principal.8. Software especial: el equipo usa el sistema operativo Xenomai en tiempo real para Linux y un marco de control de movimiento especial llamado PODO (desarrollado por KAIST ). También aprovechan el entorno de simulación Gazebo. El equipo desarrolló su software con un enfoque en el ancho de banda bajo y la comunicación inestable entre los operadores y el robot. Y ahora echemos un vistazo más de cerca a DRC-HUBO y cómo realizó las ocho tareas, lo que trajo la victoria al equipo KAIST (si desea ver todo en su totalidad, puede hacerlo por referencia; una versión acelerada está aquí):
Y ahora echemos un vistazo más de cerca a DRC-HUBO y cómo realizó las ocho tareas, lo que trajo la victoria al equipo KAIST (si desea ver todo en su totalidad, puede hacerlo por referencia; una versión acelerada está aquí):1. La tarea de conducir.
Se permitió a los equipos realizar modificaciones en el vehículo Polaris para que sus robots pudieran entrar y salir fácilmente del automóvil. El equipo de KAIST instaló un dispositivo de metal con dos palancas en la parte inferior del automóvil; Cuando el DRC-HUBO presionó una de las palancas, el sistema de cable funcionó de manera que la segunda palanca presionó el acelerador. Con su mano izquierda, el robot se aferró al auto, y con su mano derecha controló el volante. Completó esta tarea muy rápidamente (el proceso tomó un poco más de un minuto) y, a diferencia de otros equipos, no dejó de pasar obstáculos.2. La tarea de salir del vehículo.
Esta fue una de las tareas más difíciles. Preparándose para él, profesor Oh, como nos dijo, salió del auto varias veces para comprender qué movimientos y partes del cuerpo usa para esto. Concluyó que se requeriría un "enfoque dinámico". Su equipo programó el DRC-HUBO para que levantara las manos y se aferrara al marco de la máquina. El robot usa 100 Newtons de tracción para cada mano. Cuando los brazos levantan el cuerpo del robot, en general se cae del automóvil, aunque el movimiento está controlado (gracias al "enfoque dinámico"). ¡Presta atención a su maravillosa maniobra para salir del auto alrededor de la 1:00! El profesor O informó que durante el desarrollo de este movimiento se quemaron varios motores, pero el problema se resolvió utilizando los motores más potentes y especialmente fabricados. Por el momento, el robot puede salir del automóvil en menos de 4 minutos, y cuando ya está en el suelo, se sienta de rodillas y se va.3. La misión con la puerta.
A diferencia de otros robots que tuvieron que pararse (y balancearse sobre dos patas) para completar esta tarea, el DRC-HUBO podía arrodillarse girando la manija de la puerta. Utiliza hábilmente su otra mano para mantener la puerta abierta mientras gira el pomo de la puerta. En menos de 2 minutos, atravesó una puerta.4. La tarea con la válvula.
Tenga en cuenta que al comienzo del video, el LIDAR se mueve hacia arriba y hacia abajo para permitir a los operadores escanear el terreno frente al robot. Luego, cuando el DRC-HUBO se acerca a la válvula de compuerta , gira la parte superior del cuerpo 180 grados. Preste atención a su movimiento a las 0:20, porque puede que no lo note (el ángulo de disparo no muestra la parte inferior del cuerpo del robot, desafortunadamente). En esta posición, aún de rodillas, el robot puede elevar el cuerpo para que sea más fácil controlar la válvula (¿por qué pararse si no es necesario?). El robot escanea el terreno usando el LIDAR, determina la posición y después de 3 minutos realiza la tarea. Tenga en cuenta que solo se requiere un turno, pero DRC-HUBOhizo dos vueltas completas! A las 2:01, puede ver el robot "devolver" el torso a su posición normal.5. La tarea con la pared.
Esta fue una tarea difícil para la mayoría de los equipos, porque el robot tuvo que sostener el taladro y presionar el botón de encendido / apagado para usar el dispositivo. DRC-HUBO utilizó sensores de fuerza en cada brazo para capturar mejor el instrumento. Puede ver cómo el robot se mueve solo e incluso mueve el taladro en el estante (derribando otro taladro en el camino) para capturarlo mejor. Cuando el robot logra agarrar la herramienta, los operadores muestran el lugar para la perforación y el robot hace el resto. Utiliza 20 Newtons de tracción de potencia, y puedes ver cómo usa su cuerpo para mover el taladro perfectamente en un círculo. Completar la tarea lleva al robot 11 minutos.6. El trabajo sorpresa.
La tarea consistía en sacar el enchufe e insertarlo en otro tomacorriente. Observe cómo DRC-HUBO escanea el piso y advierte que el taladro que soltó antes está en su camino. El robot gira y empuja el instrumento con las rodillas. Luego trata de darse la vuelta y parece que está chocando contra una pared. Los operadores, obviamente, notan el problema, él avanza un poco y luego puede darse la vuelta. Al final, el robot se acerca a la pared con un zócalo que está instalado más alto que la válvula de compuerta y la manija de la puerta. Es hora de ponerse de pie, y puede verlo alrededor de las 3:05. DRC-HUBOda unos pasos hacia adelante y luego de un tiempo comienza la tarea. Agarra el enchufe por el cable; creemos que fue diseñado para que los operadores pudieran ver mejor el enchufe y el brazo del robot no lo ocultara, lo que haría la tarea imposible. Con el tiempo, puede ver esto alrededor de las 7:47, cuando el robot intenta insertar el enchufe y falla el zócalo. ¡Después de varios movimientos correctivos, la tarea se ha completado! Pasaron 13 minutos y 30 segundos, más que completar todas las demás tareas.7. La tarea de moverse entre los escombros.
El DRC-HUBO puede mover sus rodillas hacia adelante o rotar el torso 180 grados y montar sus piernas hacia adelante, actuando como una cuchara excavadora. Y esto es lo que hace para completar la tarea. Puedes ver cómo gira el cuerpo a las 0:28. Eso se ve bien. El robot levanta las manos, probablemente para que no se enreden en la basura. Luego comienza a moverse entre los escombros. Se detiene solo por un segundo, cuando parece que un pedazo de madera está atrapado en un bloque de ceniza, por lo que gira un poco hacia la izquierda para quitarlo del camino. Mueve el tubo de plástico a la derecha. A las 4:14, vuelve a girar el torso y se para frente a los escalones. La tarea lleva menos de 5 minutos.8. La tarea con los pasos.
El profesor O dijo que para muchas tareas, especialmente para subir escaleras, es importante que el robot pueda ver sus piernas. Los robots grandes como ATLAS apenas pueden hacer esto, necesitan doblar el cuerpo, lo que dificulta el equilibrio. DRC-HUBOresuelve este problema de una manera muy inteligente. ¡Sube las escaleras hacia atrás! Por lo tanto, sus rodillas no bloquean las cámaras y puedes ver las piernas y el suelo. Pero, ¿cómo puede ver las piernas si se levanta hacia atrás? Girando el torso, por supuesto! Puedes ver todo el proceso, comenzando a las 0:26. El robot se arrodilla frente a las escaleras, y de repente le da la espalda. Luego se levanta, y a las 0:55 verás cómo gira el torso 180 grados. Ahora puede escanear los escalones y comenzar a subir. ¡Pero tenga en cuenta que antes de eso da dos pasos hacia un lado, hacia la izquierda (1:45)! Después de un par de minutos, lo que parecía una eternidad para el público, el robot finalmente comienza a levantarse, rompiendo los últimos tres pasos uno tras otro. ¡Claramente! En menos de 7 minutos DRC-HUBOse para en la plataforma. No hay sonido en el video, pero en ese momento el equipo y la audiencia estallaron en aplausos.KAIST hizo cuatro copias del DRC-HUBO y practicó sin cables de seguridad durante más de un mes antes de la competencia. Se entrenaron en la calle, en un estacionamiento con una superficie irregular y en diferentes condiciones climáticas, incluyendo fuerte sol y viento. "Si no retiramos los cables de seguridad, los operadores tendrán miedo", dijo el profesor O en el taller después de la competencia.Agregó que durante el entrenamiento, realizaron todas las tareas en ambos modos: de pie y de rodillas (el tiempo promedio fue de 30 minutos). El equipo fue bueno limpiando los escombros con las manos de DRC-HUBO , que no pudieron demostrar en las finales de la República Democrática del Congo , y también pudieron realizar tareas en una superficie más difícil de lo que estaba en la competencia., … ! - , .
Source: https://habr.com/ru/post/es380589/
All Articles