Los robots pueden tocar suavemente objetos delicados.
 El manipulador agarrado por hormigasIngenieros de la Universidad de Ciencia y Tecnología de Iowa ha creado un nuevo tipo de manipuladores para robots que les permitirá manejar con precisión objetos frágiles y pequeños. Pequeños tubos que se asemejan a tentáculos se envuelven alrededor del objeto deseado y lo sostienen sin apretar.El manipulador clásico se asemeja a pinzas, o dos dedos, con los que una persona toma objetos. Para sostener el elemento con los dedos, debe apretarlo. Para evitar aplastar frágiles y estuches, los ingenieros inventan varias ventosas, emulan patas de gecko y aplican otras innovaciones . Pero los ingenieros estadounidenses decidieron hacerse cargo de las capturas de pulpos y similares.Los microtúbulos tienen solo 8 milímetros de longitud y aproximadamente 0.2 milímetros de diámetro. El material de los tubos es polidimetilsiloxano , un polímero transparente.El principio de funcionamiento de los tubos es simple. Están cerrados herméticamente por un lado, y cuando el aparato bombea aire hacia ellos, se enderezan y, cuando se bombea, se pliegan en varios anillos.La forma específica del extremo del tubo y el grosor variable de la pared le permite curvarse en espiral de manera controlada. La forma compleja del tubo se creó gracias al modelado preliminar por computadora. Estos son los primeros manipuladores con forma de tentáculo que pueden plegarse de tal manera que lograron hacerse tan pequeños. Los detalles se pueden encontrar en la revista científica Nature .Dichos manipuladores encontrarán aplicación en el campo de los robots médicos. Se pueden usar agarres suaves durante las operaciones para reparar y mover estructuras como vasos sanguíneos o tejidos blandos.Las patas de las arañas comunes funcionan según un principio similar. Las piernas de la araña se doblan, como de costumbre, con los músculos, y la hemolinfa, un líquido especial que circula por la cavidad del cuerpo del artrópodo, que se dobla por la presión hidrostática.Los tentáculos han atraído a los ingenieros durante mucho tiempo. Científicos de la Escuela de Ingeniería y Ciencias Aplicadas de Harvard (EE. UU.) Ya han demostrado una solución similar con tubos neumáticos flexibles .
El manipulador agarrado por hormigasIngenieros de la Universidad de Ciencia y Tecnología de Iowa ha creado un nuevo tipo de manipuladores para robots que les permitirá manejar con precisión objetos frágiles y pequeños. Pequeños tubos que se asemejan a tentáculos se envuelven alrededor del objeto deseado y lo sostienen sin apretar.El manipulador clásico se asemeja a pinzas, o dos dedos, con los que una persona toma objetos. Para sostener el elemento con los dedos, debe apretarlo. Para evitar aplastar frágiles y estuches, los ingenieros inventan varias ventosas, emulan patas de gecko y aplican otras innovaciones . Pero los ingenieros estadounidenses decidieron hacerse cargo de las capturas de pulpos y similares.Los microtúbulos tienen solo 8 milímetros de longitud y aproximadamente 0.2 milímetros de diámetro. El material de los tubos es polidimetilsiloxano , un polímero transparente.El principio de funcionamiento de los tubos es simple. Están cerrados herméticamente por un lado, y cuando el aparato bombea aire hacia ellos, se enderezan y, cuando se bombea, se pliegan en varios anillos.La forma específica del extremo del tubo y el grosor variable de la pared le permite curvarse en espiral de manera controlada. La forma compleja del tubo se creó gracias al modelado preliminar por computadora. Estos son los primeros manipuladores con forma de tentáculo que pueden plegarse de tal manera que lograron hacerse tan pequeños. Los detalles se pueden encontrar en la revista científica Nature .Dichos manipuladores encontrarán aplicación en el campo de los robots médicos. Se pueden usar agarres suaves durante las operaciones para reparar y mover estructuras como vasos sanguíneos o tejidos blandos.Las patas de las arañas comunes funcionan según un principio similar. Las piernas de la araña se doblan, como de costumbre, con los músculos, y la hemolinfa, un líquido especial que circula por la cavidad del cuerpo del artrópodo, que se dobla por la presión hidrostática.Los tentáculos han atraído a los ingenieros durante mucho tiempo. Científicos de la Escuela de Ingeniería y Ciencias Aplicadas de Harvard (EE. UU.) Ya han demostrado una solución similar con tubos neumáticos flexibles .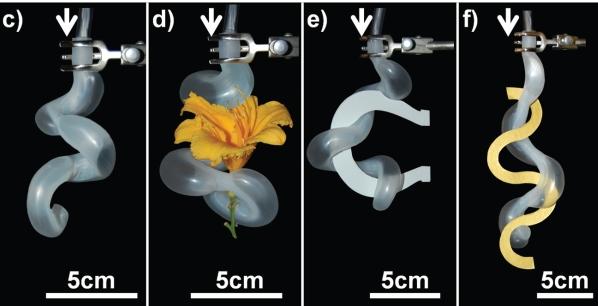 Creación de ingenieros de HarvardDe soluciones inusuales, podemos recordar el concepto de prótesis , en el cual el motor tira y afloja los cables que pasan a través del tentáculo. Permiten que la prótesis se enrolle gradualmente, capturando objetos desde pequeños hasta bastante grandes. La prótesis se endereza debido a la elasticidad interna.
Creación de ingenieros de HarvardDe soluciones inusuales, podemos recordar el concepto de prótesis , en el cual el motor tira y afloja los cables que pasan a través del tentáculo. Permiten que la prótesis se enrolle gradualmente, capturando objetos desde pequeños hasta bastante grandes. La prótesis se endereza debido a la elasticidad interna. Prótesis de tentáculo
Prótesis de tentáculoSource: https://habr.com/ru/post/es380865/
All Articles