La idea de hacer un control deslizante de video, y también uno motorizado, se me ocurrió en agosto de 2014. En ese momento, había estado filmando paisajes estrellados nocturnos durante más de un año y decidí probarme en el negocio de timelapse.En el lapso de tiempo, ¡siempre se aprecia la "vivacidad de la imagen"! El cambio de fotogramas realizados en una cámara montada estáticamente en la mayoría de los casos no afecta al espectador de manera tan efectiva como la misma trama, sino que ya se tomó en una cámara en movimiento en el espacio. La composición del video está llena de dinámicas ilimitadas, ¡dejando una buena impresión en el video! ¿Qué pasa con las ventas de tales equipos? ¡No hay problema! Eso es solo miedo a los precios cósmicos ... En el proceso de búsqueda de opciones, ya sea de marca o chino, usted concluye que el concepto de "control deslizante motorizado de presupuesto" no existe en la naturaleza. ¡La opción de presupuesto es solo si la diseñas tú mismo! Eso es exactamente lo que hice!No comencé a fabricar el control deslizante de inmediato, hasta que encontré una salida, ¡cómo hacer un riel de bajo costo! Todo comenzó con ella.En la tienda de muebles compré guías para accesorios de muebles y rodillos para ellos.
¿Qué pasa con las ventas de tales equipos? ¡No hay problema! Eso es solo miedo a los precios cósmicos ... En el proceso de búsqueda de opciones, ya sea de marca o chino, usted concluye que el concepto de "control deslizante motorizado de presupuesto" no existe en la naturaleza. ¡La opción de presupuesto es solo si la diseñas tú mismo! Eso es exactamente lo que hice!No comencé a fabricar el control deslizante de inmediato, hasta que encontré una salida, ¡cómo hacer un riel de bajo costo! Todo comenzó con ella.En la tienda de muebles compré guías para accesorios de muebles y rodillos para ellos.
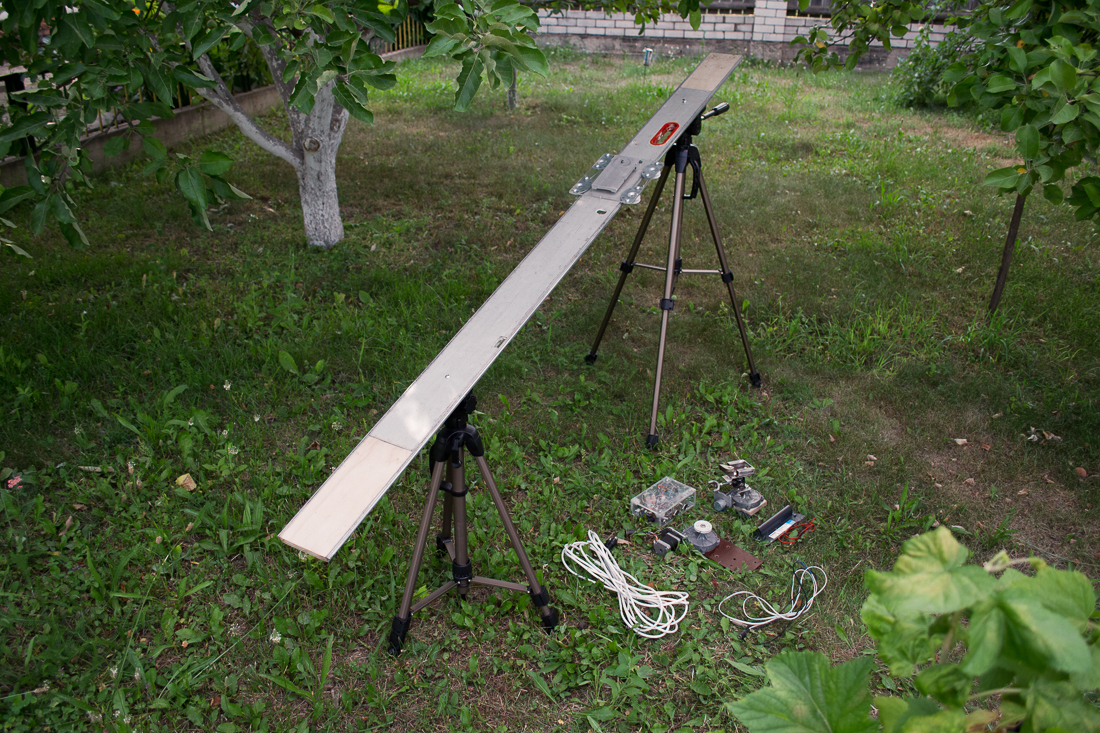
 Para la base de los rieles, tomé la regla de construcción de aluminio de 1,5 m de largo, disponible en la granja (el nivel incorporado ayuda a instalar sin problemas el control deslizante). Con la ayuda de un taladro, remaches de escape, así como insertos de madera contrachapada en ambos extremos de la regla, se hizo un riel de 2 metros de largo en solo unas pocas horas.
Para la base de los rieles, tomé la regla de construcción de aluminio de 1,5 m de largo, disponible en la granja (el nivel incorporado ayuda a instalar sin problemas el control deslizante). Con la ayuda de un taladro, remaches de escape, así como insertos de madera contrachapada en ambos extremos de la regla, se hizo un riel de 2 metros de largo en solo unas pocas horas. Sigue siendo el caso para el carro. Lo hice de plexiglás duradero. Los rodillos estaban sujetos con pernos y tuercas marcados con M6.
Sigue siendo el caso para el carro. Lo hice de plexiglás duradero. Los rodillos estaban sujetos con pernos y tuercas marcados con M6. La primera prueba falló, desafortunadamente. El carro rodó en tirones, y en el video fue muy notable (un suave rebote hacia arriba y hacia abajo). Todo esto se debe a que los rodillos normalmente no están centrados en la producción (aunque el vendedor dijo que los accesorios son italianos). La salida es bloquear todas las ruedas. Ahora juegan el papel de cojinetes lisos. ¡El carro comenzó a deslizarse linealmente en el riel!
La primera prueba falló, desafortunadamente. El carro rodó en tirones, y en el video fue muy notable (un suave rebote hacia arriba y hacia abajo). Todo esto se debe a que los rodillos normalmente no están centrados en la producción (aunque el vendedor dijo que los accesorios son italianos). La salida es bloquear todas las ruedas. Ahora juegan el papel de cojinetes lisos. ¡El carro comenzó a deslizarse linealmente en el riel!
 Para mantener el riel en trípodes, se le unieron dos plataformas de trípode. Aquí están hechas en casa, hechas de madera contrachapada. Fijado con pernos y tuercas M6.
Para mantener el riel en trípodes, se le unieron dos plataformas de trípode. Aquí están hechas en casa, hechas de madera contrachapada. Fijado con pernos y tuercas M6.






Electricista
¿Qué quería hacer inicialmente? Al principio se planeó usar una unidad para el carro. Para hacer esto, solo necesita un motor de alto par, una batería y un microcircuito para controlar la velocidad. Por primera vez aprendí acerca de los servos y decidí llevarlo a mi proyecto. El chip era un servo tester que puede controlar la velocidad del servo. ¡Que necesitas! ¡Necesito tomar! Pero no tenemos prisa ...El conocimiento adicional del servoaccionamiento surgió con un concepto como Arduino. Y esto es bueno! Una vez más, pensé en el proyecto y decidí que en el control deslizante no necesitaba un movimiento de carro constante, sino uno de intervalo. Después de todo, el movimiento durante la exposición (fotografía nocturna - exposiciones largas) puede rechazar el cuadro con desenfoque.Y dado que tendré una unidad de control tan inteligente, decidí complementar mi control deslizante con otro mecanismo también. Además de moverse a lo largo de los rieles, la cámara también girará alrededor de un eje vertical. El diseño se puede llamar un "control deslizante de video con un astrotracker a bordo".Entonces, fue comprado:- Microcontrolador Arduino UNO R3
- Servo TowerPro MG995 13kg / cm
- Motor paso a paso 28byj-48-5v + Driver ULN2003
Primero, hice el montaje del servo al riel desde el mismo plexiglás.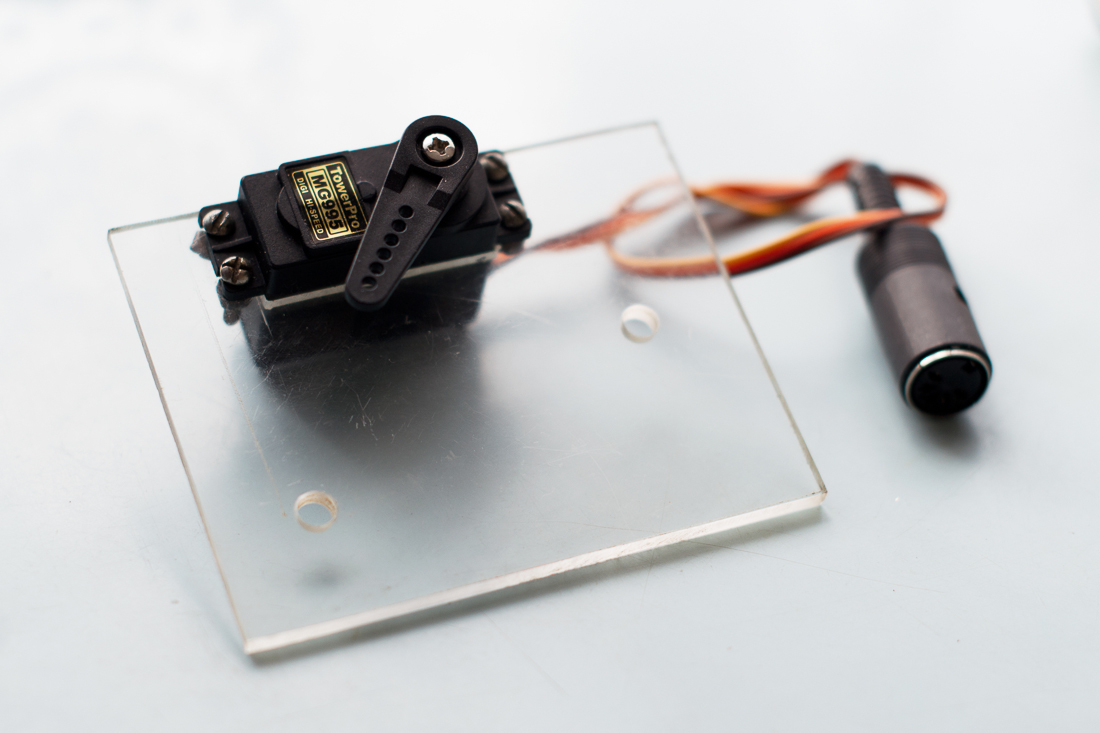 El carro y el servo estaban conectados por un hilo inextensible, que se enrolla en su eje.La cámara gira con un motor paso a paso 28byj-48 , que está montado en un engranaje helicoidal 1/55.
El carro y el servo estaban conectados por un hilo inextensible, que se enrolla en su eje.La cámara gira con un motor paso a paso 28byj-48 , que está montado en un engranaje helicoidal 1/55. Decidí hacer un caso para Arduino y otros componentes eléctricos de plexiglás. Pegué todo con superpegamento, aunque generalmente usan pegamento especial para este material, que suelda las partes entre sí y luego no las separa. Para conectar los motores a la unidad de control, hice dos cables, en los cuales utilicé conectores macho soviéticos confiables y probados tipo DIN 5 PIN .
Decidí hacer un caso para Arduino y otros componentes eléctricos de plexiglás. Pegué todo con superpegamento, aunque generalmente usan pegamento especial para este material, que suelda las partes entre sí y luego no las separa. Para conectar los motores a la unidad de control, hice dos cables, en los cuales utilicé conectores macho soviéticos confiables y probados tipo DIN 5 PIN . La energía se suministra a través de un conector de CC normal.Batería: 7.2V, 2250mAh : ¡
La energía se suministra a través de un conector de CC normal.Batería: 7.2V, 2250mAh : ¡ Primer tiempo de prueba eléctrica! Conectamos los motores, alimentamos, instalamos la cámara, le conectamos el control remoto y lo configuramos para Arduino: velocidad de obturación 30 segundos, intervalo 5 segundos. Presionamos simultáneamente inicio en el control remoto y Arduino. Estamos esperando ...En menos de cinco minutos, se descubrió una asincronía en el trabajo. El motor principal comenzó a girar cuando el obturador todavía estaba abierto. La cosa es el control remoto: no cuenta el tiempo correctamente. Si en tiempo real pasan 30 segundos, el contador en el control remoto solo contará 28-29 segundos. Él está disminuyendo la velocidad. ¡Tal vez debido al hecho de que el chino o por alguna otra razón (será interesante aprender de ti por qué)!Para evitar esto, debe hacer todo sobre la base de un sistema: Arduino. Pero, ¿cómo controlar el obturador de la cámara a través de Arduino?Google de nuevo para ayudar!Adaptador de control remoto :
Primer tiempo de prueba eléctrica! Conectamos los motores, alimentamos, instalamos la cámara, le conectamos el control remoto y lo configuramos para Arduino: velocidad de obturación 30 segundos, intervalo 5 segundos. Presionamos simultáneamente inicio en el control remoto y Arduino. Estamos esperando ...En menos de cinco minutos, se descubrió una asincronía en el trabajo. El motor principal comenzó a girar cuando el obturador todavía estaba abierto. La cosa es el control remoto: no cuenta el tiempo correctamente. Si en tiempo real pasan 30 segundos, el contador en el control remoto solo contará 28-29 segundos. Él está disminuyendo la velocidad. ¡Tal vez debido al hecho de que el chino o por alguna otra razón (será interesante aprender de ti por qué)!Para evitar esto, debe hacer todo sobre la base de un sistema: Arduino. Pero, ¿cómo controlar el obturador de la cámara a través de Arduino?Google de nuevo para ayudar!Adaptador de control remoto : el adaptador de control remoto está conectado en un extremo a la cámara y el otro (conector 2.5) al cable del control remoto. Jack 2.5 tiene tres contactos, y desde el principio del control remoto de la cámara, aprendí que para activar el obturador, dos de estos tres contactos deben estar cerrados. Después de probar varias combinaciones, ¡encontré que funciona!Hice un cable de dos núcleos, uno de los cuales tiene un conector jack 2.5 para la madre y está conectado a través de ese adaptador del control remoto a la cámara, el otro extremo va a la unidad de control. En su interior, se me ocurrió con la ayuda de un botón mecánico para cerrar estas dos venas. Está hecho de micro servo y botón de contacto.Un micro servo rockero presiona un botón de reloj en un momento determinado, cerrando así dos contactos, y la cámara toma una foto:
el adaptador de control remoto está conectado en un extremo a la cámara y el otro (conector 2.5) al cable del control remoto. Jack 2.5 tiene tres contactos, y desde el principio del control remoto de la cámara, aprendí que para activar el obturador, dos de estos tres contactos deben estar cerrados. Después de probar varias combinaciones, ¡encontré que funciona!Hice un cable de dos núcleos, uno de los cuales tiene un conector jack 2.5 para la madre y está conectado a través de ese adaptador del control remoto a la cámara, el otro extremo va a la unidad de control. En su interior, se me ocurrió con la ayuda de un botón mecánico para cerrar estas dos venas. Está hecho de micro servo y botón de contacto.Un micro servo rockero presiona un botón de reloj en un momento determinado, cerrando así dos contactos, y la cámara toma una foto: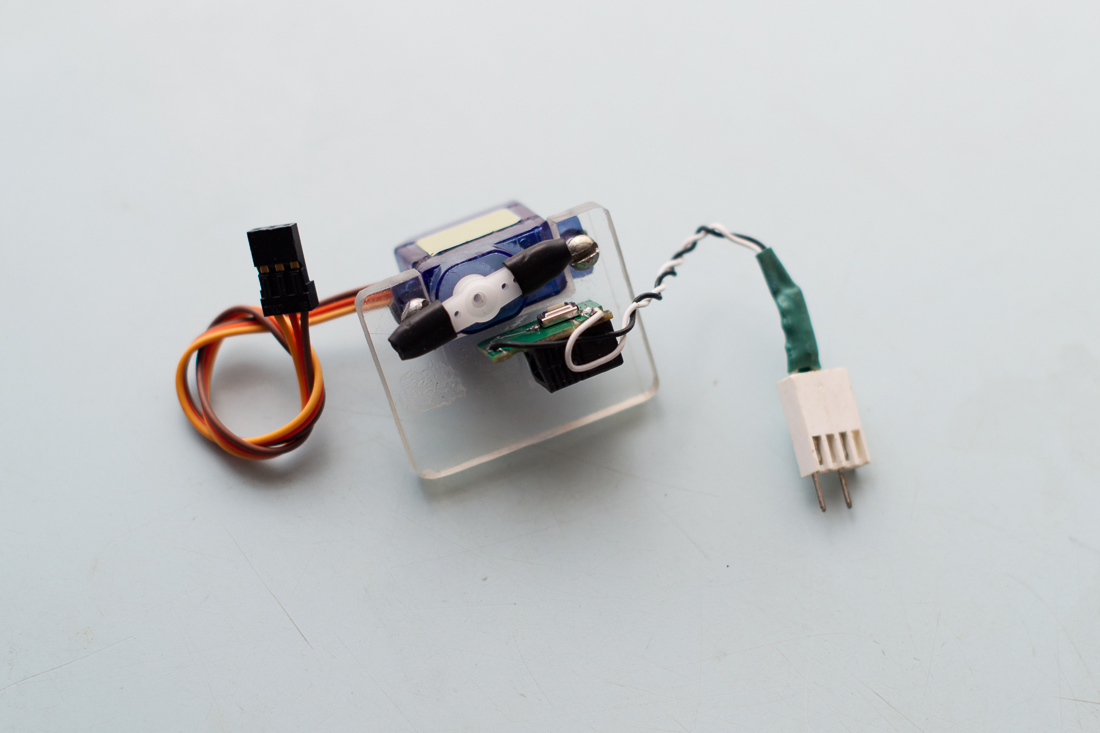 Cable de núcleo: cable de
Cable de núcleo: cable de dos núcleos + adaptador remoto: a
dos núcleos + adaptador remoto: a finales de otoño, cuando hay un pequeño congelador, de alguna manera decidí probar el control deslizante y encontré otro defecto: incluso a + 2 ° C, el servo principal se negó a funcionar. Esto se debió al engrosamiento de la lubricación de los engranajes. Después de 5-10 minutos, el servo se atascó a esa temperatura.Más tarde, ya en invierno real, cuando hubo heladas de hasta -10 ° C, ¡el micro servo también se hizo sentir! Aunque a la misma temperatura a + 2 ° C, en la que el MG995 grande dejó de funcionar, el botón mecánico funcionó de manera estable y no causó ninguna queja. Aparentemente, esto se debe al hecho de que estaba en un caso con un Arduino, que no permitió que un micro motor se congelara rápidamente. Luego, el botón funcionó bien, pero ahora no se envió la señal del disparador cada vez, y esto no es lo que necesitamos. Tuve que modificar.Pronto encontró una solución para el motor y el disparador. Compré un motor paso a paso bipolar como Nema 17 y más un voluminoso controlador casero del vendedor. ¡Y no hay escarcha ahora es un obstáculo!
finales de otoño, cuando hay un pequeño congelador, de alguna manera decidí probar el control deslizante y encontré otro defecto: incluso a + 2 ° C, el servo principal se negó a funcionar. Esto se debió al engrosamiento de la lubricación de los engranajes. Después de 5-10 minutos, el servo se atascó a esa temperatura.Más tarde, ya en invierno real, cuando hubo heladas de hasta -10 ° C, ¡el micro servo también se hizo sentir! Aunque a la misma temperatura a + 2 ° C, en la que el MG995 grande dejó de funcionar, el botón mecánico funcionó de manera estable y no causó ninguna queja. Aparentemente, esto se debe al hecho de que estaba en un caso con un Arduino, que no permitió que un micro motor se congelara rápidamente. Luego, el botón funcionó bien, pero ahora no se envió la señal del disparador cada vez, y esto no es lo que necesitamos. Tuve que modificar.Pronto encontró una solución para el motor y el disparador. Compré un motor paso a paso bipolar como Nema 17 y más un voluminoso controlador casero del vendedor. ¡Y no hay escarcha ahora es un obstáculo!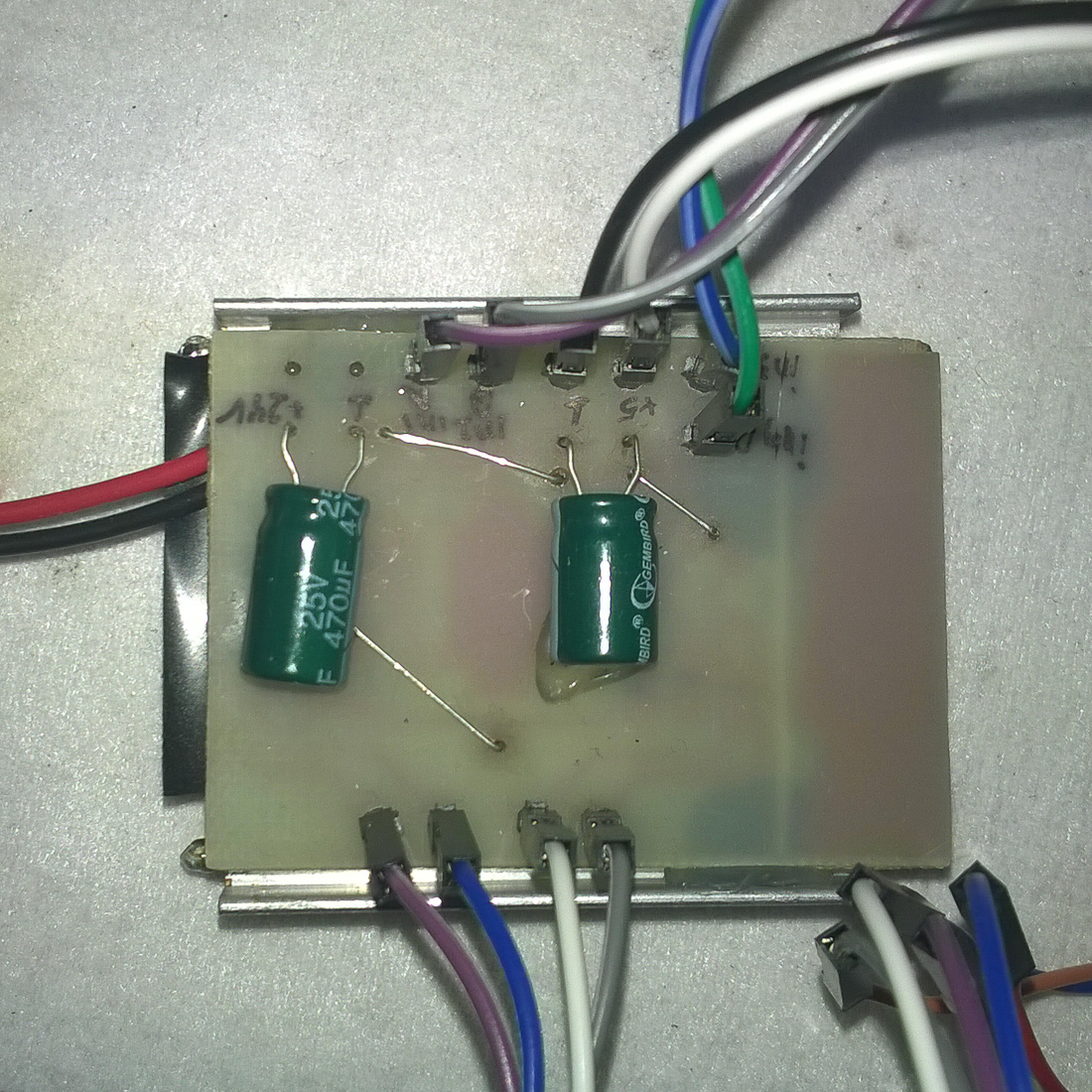 También utilicé este motor paso a paso junto con una caja de cambios 1/55 similar, sobre la que escribí anteriormente. El cable está enrollado en un carrete.
También utilicé este motor paso a paso junto con una caja de cambios 1/55 similar, sobre la que escribí anteriormente. El cable está enrollado en un carrete. Resolví el problema con el botón leyendo un artículo en Internet sobre un intervaloómetro casero para una cámara basada en Arduino. Allí, se utilizó un transistor convencional para cerrar el circuito (dos contactos).También me deshice de un enorme controlador casero, que se calentó brutalmente debido a la alta corriente que contenía, y que podría fallar en el momento equivocado. Sustituyéndolo después por el famoso EasyDriver , tuve la oportunidad de ajustar la corriente en el controlador debido a la resistencia de sintonización. La intensidad actual afecta proporcionalmente el par motor. Aquí es menos de la mitad de la norma máxima, ya que se utiliza una caja de engranajes helicoidales con una relación de transmisión grande. El conductor comenzó a calentarse significativamente menos.También en EasyDriveres posible organizar fácilmente un "modo de suspensión" cuando el controlador está apagado y no consume corriente en el momento de retención del motor: el motor está completamente apagado. ¡La capacidad de dividir el paso tampoco es una característica adicional! ¡Ahora, sin ningún problema, puede hacer una copia relativamente idéntica de la unidad de control de los componentes comprados en la tienda!Ahora hay mucho más espacio en el caso de lo que era.ANTES
Resolví el problema con el botón leyendo un artículo en Internet sobre un intervaloómetro casero para una cámara basada en Arduino. Allí, se utilizó un transistor convencional para cerrar el circuito (dos contactos).También me deshice de un enorme controlador casero, que se calentó brutalmente debido a la alta corriente que contenía, y que podría fallar en el momento equivocado. Sustituyéndolo después por el famoso EasyDriver , tuve la oportunidad de ajustar la corriente en el controlador debido a la resistencia de sintonización. La intensidad actual afecta proporcionalmente el par motor. Aquí es menos de la mitad de la norma máxima, ya que se utiliza una caja de engranajes helicoidales con una relación de transmisión grande. El conductor comenzó a calentarse significativamente menos.También en EasyDriveres posible organizar fácilmente un "modo de suspensión" cuando el controlador está apagado y no consume corriente en el momento de retención del motor: el motor está completamente apagado. ¡La capacidad de dividir el paso tampoco es una característica adicional! ¡Ahora, sin ningún problema, puede hacer una copia relativamente idéntica de la unidad de control de los componentes comprados en la tienda!Ahora hay mucho más espacio en el caso de lo que era.ANTES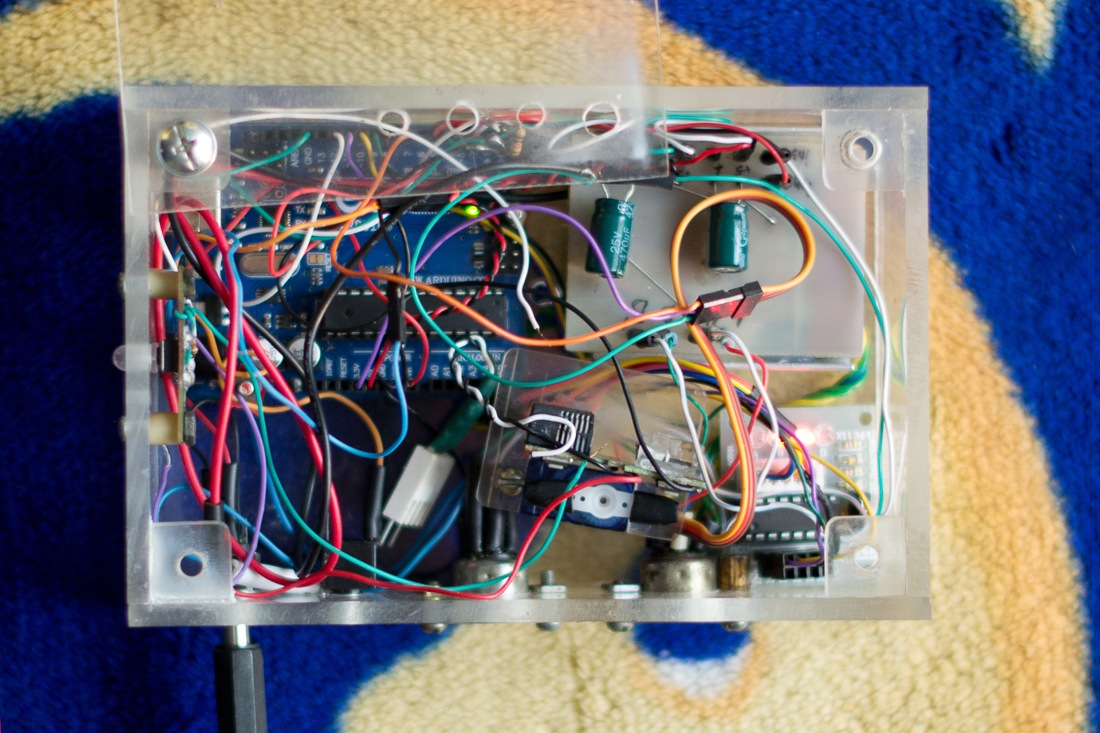 DESPUÉS
DESPUÉS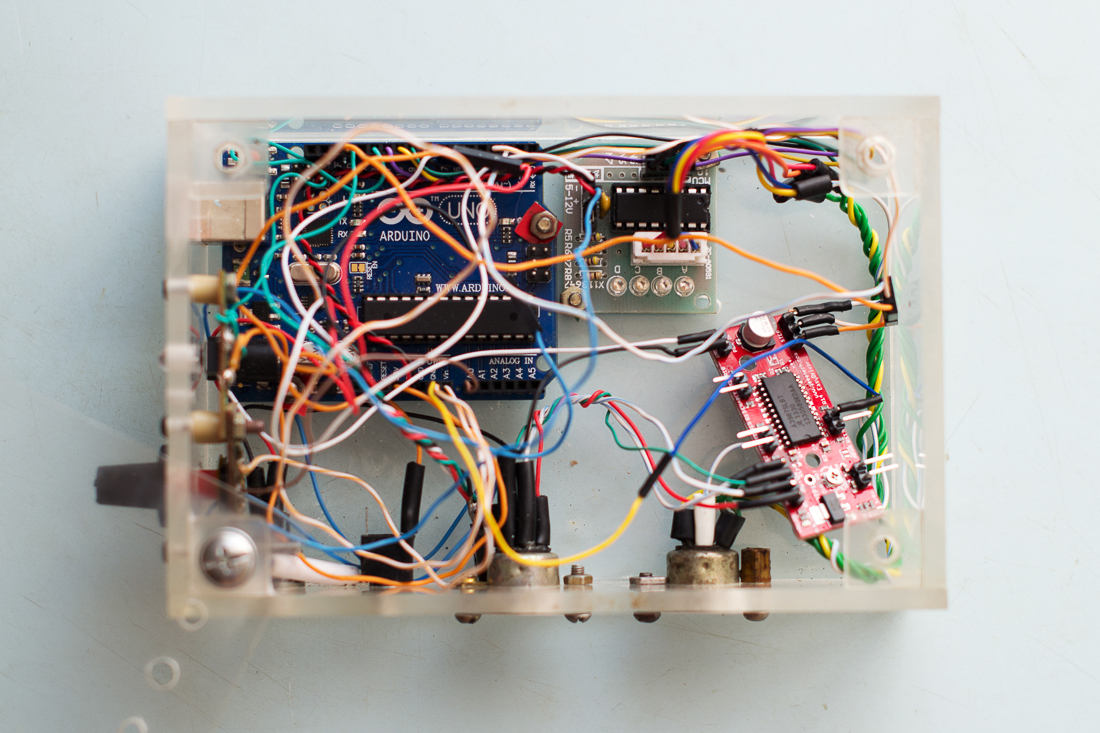
Hora
Pasé la mayor parte aprendiendo programación en Arduino. E incluso ahora, mi boceto se puede modificar. Solo hay un problema. No puedo lograr que presionar el botón del reloj cambie el modo de funcionamiento y permanezca en uno de ellos constantemente. Los modos difieren solo en el tiempo de exposición. El intervalo es siempre igual e igual a 3.5 segundos. Lo intenté mucho, pero siempre que exista esa opción. Lo escribí a finales de invierno y me queda bien.Es simple: la velocidad de obturación se establece y se compara con el período de tiempo transcurrido desde el momento en que el programa comenzó hasta el momento en que se presiona el botón del reloj. Para cambiarlo, debe reiniciar Arduino.Bosquejo:#include <Stepper.h>
int Distance = 0;
int x = 0;
#define STEPS_MOTOR 32
#define STEPS_OUTPUT 32 * 64
Stepper stepper2(STEPS_MOTOR, 8, 10, 9, 11);
int steps;
int button = 12;
int previousMillis = 0;
void setup()
{
pinMode(13, OUTPUT);
pinMode(12, INPUT);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(7, OUTPUT);
}
void loop()
{
if (digitalRead(12) == HIGH)
{
previousMillis = millis();
int x = map(previousMillis,60000, 0, 78, 0);
a:
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
{
digitalWrite(3, HIGH);
delayMicroseconds(552);
digitalWrite(3, LOW);
delayMicroseconds(552);
Distance = Distance + 1;
if (Distance == 3620)
{
if (digitalRead(2) == HIGH)
{
digitalWrite(2, HIGH);
}
else
{
digitalWrite(2, LOW);
}
digitalWrite(2, LOW);
digitalWrite(3, LOW);
steps = STEPS_OUTPUT;
stepper2.setSpeed(161.25);
stepper2.step(steps = - x);
digitalWrite(8, LOW);
digitalWrite(10, LOW);
digitalWrite(9, LOW);
digitalWrite(11, LOW);
delay(500);
digitalWrite(13, HIGH);
digitalWrite(7, HIGH);
delay(50);
digitalWrite(7, LOW);
digitalWrite(13, LOW);
delay(previousMillis-3050);
Distance = 0;
}
}
goto a;
}}
Instalación de control deslizante



Todo está conectado. ¡El control deslizante está listo para funcionar!




recomendaciones
Lo que pienso:en este momento, el control deslizante está listo para usar y está cumpliendo plenamente su propósito, pero hay algunos matices que me gustaría finalizar en el futuro. Casi todos pertenecen al carruaje. Creo que te diste cuenta.Necesitamos un mecanismo más confiable para sostener el "astrotracker". El eje de su eje siempre debe ser perpendicular al suelo. ¡La cabeza del trípode de marca le dará a mi diseño un aspecto aún más estético que originalmente concebí para mí! En cuanto a la electrónica: así me conviene aquí, ¡incluso el boceto de Arduino! En cualquier caso, ¡ya he logrado el resultado previsto!Un ejemplo puramente técnico del control deslizante (invierno, febrero, -15 ° C):El costo de este control deslizante de video es inferior a $ 100, sin incluir el costo de dos trípodes.¡Gracias por la atención! ¡Buena suerte a todos en casero!