Otra aplicación de la máquina CNC.
Una máquina CNC es una máquina controlada numéricamente. Le permite producir piezas de acuerdo con un programa preparado previamente con alta precisión, repetibilidad y velocidad. Este artículo discutirá la máquina de bobinado que creé, a la que le di el nombre de Orbiter.La esfera CNC se cruza estrechamente con la esfera de impresión 3D. Mi máquina tiene un diseño bastante inusual para máquinas CNC, ya que todos están acostumbrados a ver fresadoras CNC, quemadores CNC, impresoras 3D , y la máquina descrita en este artículo es una máquina de bobinado, o más bien una máquina para enrollar pantallas de lámparas hechas de hilos y pegamento. El principio de funcionamiento es enrollar una bola giratoria inflada que, después de que el pegamento se seca, desciende y se retira.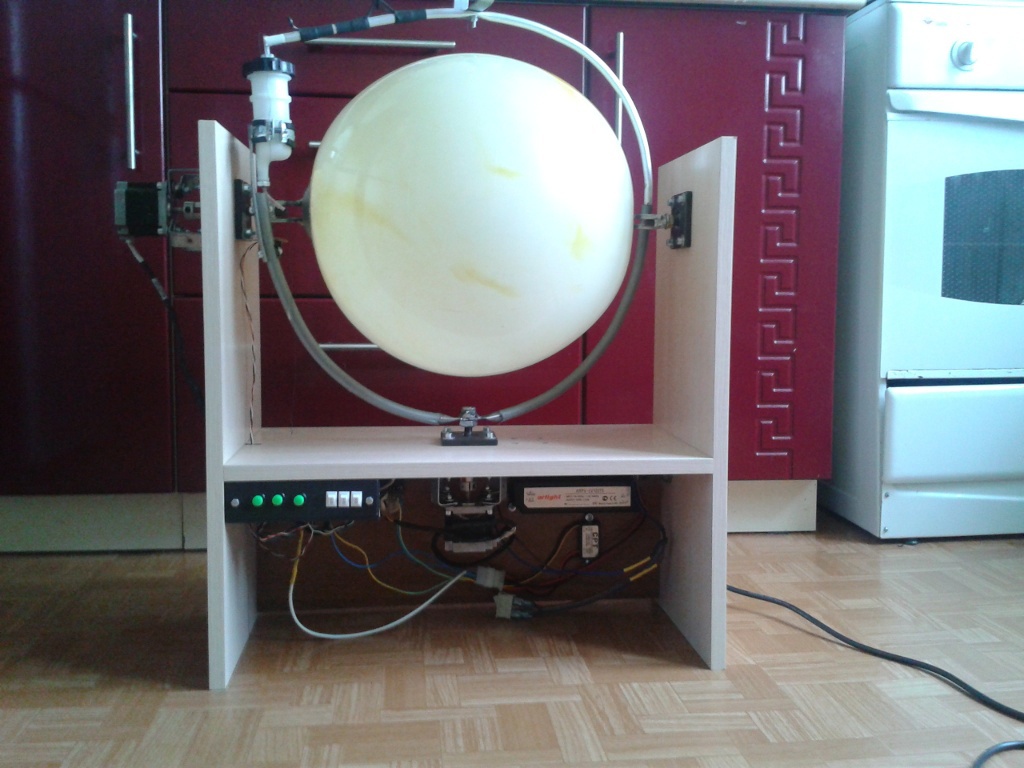 En los últimos diez años, el precio de los componentes y la electrónica del CNC se ha reducido significativamente, por lo que casi todos pueden permitirse el lujo de ensamblar una máquina CNC. Al armar la máquina, me guié por la educación en ingeniería, el presupuesto y el sentido común. Por esta razón, traté de buscar piezas para la máquina en venta libre con un mínimo de metalistería, se ordenó algo en China, se compró algo en tiendas de automóviles y de construcción, algo se terminó en los garajes de los amigos. Algunos detalles todavía tenían que ser ordenados por un turner.
En los últimos diez años, el precio de los componentes y la electrónica del CNC se ha reducido significativamente, por lo que casi todos pueden permitirse el lujo de ensamblar una máquina CNC. Al armar la máquina, me guié por la educación en ingeniería, el presupuesto y el sentido común. Por esta razón, traté de buscar piezas para la máquina en venta libre con un mínimo de metalistería, se ordenó algo en China, se compró algo en tiendas de automóviles y de construcción, algo se terminó en los garajes de los amigos. Algunos detalles todavía tenían que ser ordenados por un turner.Herramientas y materiales
Herramienta:
- Destornillador (con un juego de brocas y brocas)
- Juego de llaves y destornilladores
- Soldador, fundente, soldadura
- Archivos, archivos
- Soldadura semiautomática
Materiales:
- Muebles de aglomerado 16mm
- Construcción de sujetadores
- Tubo de acero diámetro 12 mm, longitud 1 m
- Surtido de tuercas, pernos, tornillos, arandelas
- , ,
:
- Nema 23
- TB6600
- 608
- CPLD EPM570
- 12 6,5
- 5 3
Creo que con herramientas y materiales todo está claro, me detendré en los detalles con más detalle. Los precios son actuales a partir de abril de 2015. Compré dos motores paso a paso bajo un anuncio por 10 pies cúbicos. una pieza. Controladores y acoplamientos , así como un convertidor de pulso , ~ 12, ~ 6 y ~ 2 c.u. respectivamente, se ordenaron desde China. Rodamientos comprados en una tienda de automóviles a un precio de 0.5 pies cúbicos una pieza. Fee Mars rover ordenado en el sitio web del mismo nombre. La fuente de alimentación yacía innecesariamente en casa. El zócalo y el optoacoplador se encontraron en las piezas de repuesto que quedaron después de desmontar la impresora.Dado que la máquina se creó desde cero, muchas partes tuvieron que buscarse durante mucho tiempo, teniendo solo una idea aproximada de cómo deberían verse. Encontré el siguiente método para mí: vamos a una tienda de autos o una tienda de materiales de construcción y buscamos algo similar, si es necesario, terminamos con un archivo.Historia de la creacion
En el invierno de 2013, en preparación para las vacaciones de Año Nuevo, estaba buscando información sobre la fabricación de bolas de hilo y pegamento, que se utilizan como decoración. Encontré una foto de bolas que claramente no estaban hechas a mano. Después de profundizar en el tema, aprendí que tales bolas son hechas por cierto aficionado de Moscú en una máquina de su propia fabricación. La máquina era mecánica. Además de las referencias a un par de foros en Rusia y uno en el segmento extranjero de la red, no encontré nada más. Tuve la idea de hacer una máquina CNC para enrollar tales bolas.Comenzó a profundizar en el tema. Aprendí que se usa un tipo similar de bobinado para hacer cilindros de alta presión de varias formas a partir de compuestos. Miré las patentes sobre el tema de la liquidación. La conclusión es la siguiente, todos los desarrollos en los diseños de tales máquinas se pueden dividir en 2 grupos: máquinas con dos motores y máquinas con tres motores. La ventaja de la primera radica en la simplicidad de la parte mecánica y, por lo tanto, en la masa y movilidad de la máquina, así como en el ahorro de un motor, que obviamente es la ventaja de la segunda en la facilidad de control.Se decidió desarrollar la máquina de acuerdo con el esquema con dos motores. Como soy programador de profesión, no vi ningún problema en la gestión. Los requisitos para la máquina fueron los siguientes: presupuesto mínimo, dimensiones y peso pequeños, silenciosidad y movilidad. También se decidió hacer que la máquina sea autónoma, es decir, sin estar atada a una computadora, de modo que sea posible ponerla en funcionamiento con una salida de 220 voltios. Como actualmente soy un desarrollador de FPGA, se decidió hacer el control de la máquina en FPGA (o más bien CPLD ). La elección recayó en el tablero Mars rover. Aquí la elección es simple: ya se ha comprado y sus recursos para los cálculos de gestión deberían haber sido suficientes. Avanzaré un poco y diré que en este momento se agrega la capacidad de controlar la máquina desde una PC, así como una versión autónoma con Arduino .Mecánica
Hoy en día, cuando casi todos fabrican máquinas CNC e impresoras 3D, se han escrito muchos artículos sobre la elección de los componentes, no me detendré en esto en detalle.Los ejes y las carcasas de los rodamientos se solicitaron a un amigo de diseño en la fábrica.Pedimos detalles de la caja de la máquina de aglomerado de muebles en tamaño. Barato y alegre. Luego marcamos y perforamos agujeros para el montaje y el alojamiento de los rodamientos. Montamos el caso en euroscrews . Los rodamientos se presionan en la carcasa y todo este conjunto se monta en la carcasa. Al ensamblar, utilicé los tornillos de "hexágono interno", hay cierta belleza estética en ellos, así como tuercas autoblocantes.Los ejes se hicieron con un ajuste flojo, ya que la carga sobre ellos es pequeña. Los ponemos a mano con poco esfuerzo. La unidad de montaje de los motores paso a paso en la carcasa del cojinete se rehizo muchas veces. La razón es el requisito de silenciosidad. Los motores paso a paso vibran mucho.
La unidad de montaje de los motores paso a paso en la carcasa del cojinete se rehizo muchas veces. La razón es el requisito de silenciosidad. Los motores paso a paso vibran mucho.Lucha contra esto de varias maneras:
- Paso de trituración (implementado en electrónica) +
- Controladores de motor paso a paso caros de alta calidad (tenemos un presupuesto, por lo que los controladores son baratos) -
- Acoplamientos de alta calidad con inserto de poliuretano +
- Amortiguador de montaje +
- El aumento en la masa de la máquina (hasta el vertido en la base, nuestra máquina debe ser móvil) -
Como resultado, llegué al siguiente diseño del soporte, que es esencialmente un amortiguador. Se compraron tapas para carrocerías, diámetro de aterrizaje de 10 mm. Perforamos agujeros en ellos con un taladro tubular de 5 mm para baldosas. A continuación, tomamos el soporte, doblamos la forma de la letra "P", perforamos agujeros coaxialmente y colocamos los tapones allí. Los tapones de goma junto con el inserto de poliuretano en el acoplamiento amortiguan perfectamente la vibración. Entonces aún tenía que recurrir a un amigo para que me ayudara. Cuatro partes de la máquina tuvieron que hacerse mediante soldadura. Dos soportes de neumoforma (bola), apilador de neumoforma y soporte. Acudimos a un amigo en el garaje y le pedimos que use un dispositivo semiautomático de soldadura. No miramos las costuras, el soldador mío es un poco mejor que ninguno. A continuación, instalamos el soporte para unir el tanque de pegamento al apilador. El soporte se suelda de una abrazadera de plomería y una placa de metal, luego se perfora junto con el apilador. Los soportes de neumoformado están soldados de mitades de cordones con autopartes. La arandela grande es del montaje de la rueda de repuesto de VAZ, la pequeña es la arandela del estante. Ponemos todo en su lugar, la mecánica está lista.
Entonces aún tenía que recurrir a un amigo para que me ayudara. Cuatro partes de la máquina tuvieron que hacerse mediante soldadura. Dos soportes de neumoforma (bola), apilador de neumoforma y soporte. Acudimos a un amigo en el garaje y le pedimos que use un dispositivo semiautomático de soldadura. No miramos las costuras, el soldador mío es un poco mejor que ninguno. A continuación, instalamos el soporte para unir el tanque de pegamento al apilador. El soporte se suelda de una abrazadera de plomería y una placa de metal, luego se perfora junto con el apilador. Los soportes de neumoformado están soldados de mitades de cordones con autopartes. La arandela grande es del montaje de la rueda de repuesto de VAZ, la pequeña es la arandela del estante. Ponemos todo en su lugar, la mecánica está lista. Hacemos un portacarretes con hilos de un tubo de aluminio, que doblamos con un arco, instalamos un soporte en forma de U en él. Instalamos anillos de cañas de pescar en el tubo usando hilos de pegamento y termocontraíbles .
Hacemos un portacarretes con hilos de un tubo de aluminio, que doblamos con un arco, instalamos un soporte en forma de U en él. Instalamos anillos de cañas de pescar en el tubo usando hilos de pegamento y termocontraíbles .
Electrónica
 Entonces, comencemos con la nutrición. Los motores paso a paso consumen un máximo de 3 amperios, los controladores de motores paso a paso y la placa móvil Mars consumen cantidades insignificantes, por lo que pueden ignorarse en el cálculo. Una fuente de alimentación de 6.5 amperios debería ser suficiente. La placa rover Mars puede alimentarse con un voltaje de 5 o 3,3 voltios, el controlador de los shagoviks es de 8-40 voltios. Alimentamos a los controladores directamente desde la fuente de alimentación y la placa móvil Mars a través de un convertidor DC-DC de 5 voltios. Los conductores tienen optoaislamiento según las señales.Un poco sobre los pasos. El ángulo de un paso en el mío es de 1.8 grados, es decir, para hacer una revolución completa, necesita dar doscientos pasos completos. En mi diseño, el apilador debe ir un poco menos de 180 grados. ¿Por qué un poco menos? Para formar agujeros en los polos. Para una pelota con un diámetro de 38 cm, obtenemos aproximadamente 158 grados, son aproximadamente 88 pasos completos. Los motores paso a paso son controlados por conductores. Nuestro controlador es un microcircuito TB6600 especial con un arnés, que también proporciona una interfaz simple para controlar un motor paso a paso, el llamado Paso / Dir . La interfaz es digital y muy simple, los pulsos se envían a la entrada Paso, en un modo de paso completo un pulso es un paso, la entrada Dir es responsable de la dirección. Lo exponemos a cero, el paso gira en una dirección, en una unidad, en la otra.Para establecer a cero (posición inicial), necesita un sensor, tomamos el optoacoplador de la impresora, no encontré la hoja de datos, pero las características de los optoacopladores en impresoras de diferentes fabricantes son similares. Estamos finalizando un poco, ya que no hay resistencias pull-up que limiten la corriente en el tablero. Cortamos las pistas, soldamos las resistencias con montaje en superficie, resulta un sensor barato. El principio de su acción es este: en el apilador colocamos una bandera de plástico (cualquier material opaco). En estado abierto, el sensor proporciona una unidad, y cuando la bandera cae en su espacio, cero.Hacemos el panel de control desde el trozo debajo del CD-Rom desde la unidad del sistema, lo conectamos a la caja de la máquina en soportes improvisados. Colocamos en él 3 botones sin fijación y 3 interruptores. Asignación de botones: configuración de la posición inicial, inicio, pausa, asignación de interruptor - cambio de la velocidad del apilador (el patrón depende de esto). Tenemos 2 ^ 3 estados de conmutación, es decir, 8 velocidades.
Entonces, comencemos con la nutrición. Los motores paso a paso consumen un máximo de 3 amperios, los controladores de motores paso a paso y la placa móvil Mars consumen cantidades insignificantes, por lo que pueden ignorarse en el cálculo. Una fuente de alimentación de 6.5 amperios debería ser suficiente. La placa rover Mars puede alimentarse con un voltaje de 5 o 3,3 voltios, el controlador de los shagoviks es de 8-40 voltios. Alimentamos a los controladores directamente desde la fuente de alimentación y la placa móvil Mars a través de un convertidor DC-DC de 5 voltios. Los conductores tienen optoaislamiento según las señales.Un poco sobre los pasos. El ángulo de un paso en el mío es de 1.8 grados, es decir, para hacer una revolución completa, necesita dar doscientos pasos completos. En mi diseño, el apilador debe ir un poco menos de 180 grados. ¿Por qué un poco menos? Para formar agujeros en los polos. Para una pelota con un diámetro de 38 cm, obtenemos aproximadamente 158 grados, son aproximadamente 88 pasos completos. Los motores paso a paso son controlados por conductores. Nuestro controlador es un microcircuito TB6600 especial con un arnés, que también proporciona una interfaz simple para controlar un motor paso a paso, el llamado Paso / Dir . La interfaz es digital y muy simple, los pulsos se envían a la entrada Paso, en un modo de paso completo un pulso es un paso, la entrada Dir es responsable de la dirección. Lo exponemos a cero, el paso gira en una dirección, en una unidad, en la otra.Para establecer a cero (posición inicial), necesita un sensor, tomamos el optoacoplador de la impresora, no encontré la hoja de datos, pero las características de los optoacopladores en impresoras de diferentes fabricantes son similares. Estamos finalizando un poco, ya que no hay resistencias pull-up que limiten la corriente en el tablero. Cortamos las pistas, soldamos las resistencias con montaje en superficie, resulta un sensor barato. El principio de su acción es este: en el apilador colocamos una bandera de plástico (cualquier material opaco). En estado abierto, el sensor proporciona una unidad, y cuando la bandera cae en su espacio, cero.Hacemos el panel de control desde el trozo debajo del CD-Rom desde la unidad del sistema, lo conectamos a la caja de la máquina en soportes improvisados. Colocamos en él 3 botones sin fijación y 3 interruptores. Asignación de botones: configuración de la posición inicial, inicio, pausa, asignación de interruptor - cambio de la velocidad del apilador (el patrón depende de esto). Tenemos 2 ^ 3 estados de conmutación, es decir, 8 velocidades. Ahora más sobre el programa de gestión. Recuerde, cuando elegimos el esquema de construcción de una máquina con dos motores, mencioné la complejidad de la parte electrónica, pero la cuestión es. El apilador debe moverse no una vez lineal, sino que de acuerdo con algún tipo de ley demasiado incomprensible, debe reducir la velocidad en los polos y acelerar en el ecuador. La trayectoria se asemeja al movimiento de los satélites en órbita, de ahí el nombre de la máquina: Orbiter. Obtenemos libros de referencia sobre trigonometría, que no abrieron el curso de la tercera universidad y los leímos cuidadosamente. Lo leemos, leemos, lo cerramos y lo volvemos a colocar en el estante. No es fácil derivar una fórmula. Estamos pasando por la ingeniería. Tomamos la pelota, le ponemos un hilo, cómo debe acostarse cuando se enrolla, hacemos un círculo con un marcador, lo marcamos. Luego, toma los puntos, interpola, a voluntad, construimos gráficos, obtenemos la fórmula. El rompecabezas se ha desarrollado, la velocidad cambia de acuerdo con la ley tangencial. El cálculo de las funciones trigonométricas en un FPGA es una tarea no trivial y bastante costosa en términos de recursos, por lo que rechazamos la idea de esta implementación. Lo haremos más fácil, colocamos en la matriz los valores de función calculados previamente.No describiré en detalle la creación del programa para FPGA, lo más probable es que haga un artículo sobre esto más adelante. Solo puedo decir que el programa está escrito en el lenguaje Verilog en el entorno Altera Quartus y está implementado como una máquina de estado, con funciones para poner a cero, iniciar, pausar y cambiar la velocidad. Los controladores paso a paso tienen soporte dividido paso a paso1/2, 1/4, 1/8 y 1/16. Las pruebas mostraron que la máquina funciona más silenciosamente al aplastar el paso 1/16 en el motor del apilador. El cambio en la trituración de tono en el motor del molde neumático casi no tuvo efecto en el nivel de ruido.La máquina se desarrolló en su tiempo libre como hobby y, por lo tanto, su construcción se retrasó casi un año. El diámetro de las bolas para enrollar 200 - 400 milímetros, pero puede aumentarlo si lo desea, no requerirá alteraciones especiales. Los hilos utilizados son la costura ordinaria, el pegamento acrílico, la bola de PVC, ya que este pegamento tiene una baja adhesión al PVC. La bola está montada en soportes en cinta de doble cara y una pequeña precarga. En conclusión, un breve video del proceso de la máquina y algunas fotos del trabajo terminado.
Ahora más sobre el programa de gestión. Recuerde, cuando elegimos el esquema de construcción de una máquina con dos motores, mencioné la complejidad de la parte electrónica, pero la cuestión es. El apilador debe moverse no una vez lineal, sino que de acuerdo con algún tipo de ley demasiado incomprensible, debe reducir la velocidad en los polos y acelerar en el ecuador. La trayectoria se asemeja al movimiento de los satélites en órbita, de ahí el nombre de la máquina: Orbiter. Obtenemos libros de referencia sobre trigonometría, que no abrieron el curso de la tercera universidad y los leímos cuidadosamente. Lo leemos, leemos, lo cerramos y lo volvemos a colocar en el estante. No es fácil derivar una fórmula. Estamos pasando por la ingeniería. Tomamos la pelota, le ponemos un hilo, cómo debe acostarse cuando se enrolla, hacemos un círculo con un marcador, lo marcamos. Luego, toma los puntos, interpola, a voluntad, construimos gráficos, obtenemos la fórmula. El rompecabezas se ha desarrollado, la velocidad cambia de acuerdo con la ley tangencial. El cálculo de las funciones trigonométricas en un FPGA es una tarea no trivial y bastante costosa en términos de recursos, por lo que rechazamos la idea de esta implementación. Lo haremos más fácil, colocamos en la matriz los valores de función calculados previamente.No describiré en detalle la creación del programa para FPGA, lo más probable es que haga un artículo sobre esto más adelante. Solo puedo decir que el programa está escrito en el lenguaje Verilog en el entorno Altera Quartus y está implementado como una máquina de estado, con funciones para poner a cero, iniciar, pausar y cambiar la velocidad. Los controladores paso a paso tienen soporte dividido paso a paso1/2, 1/4, 1/8 y 1/16. Las pruebas mostraron que la máquina funciona más silenciosamente al aplastar el paso 1/16 en el motor del apilador. El cambio en la trituración de tono en el motor del molde neumático casi no tuvo efecto en el nivel de ruido.La máquina se desarrolló en su tiempo libre como hobby y, por lo tanto, su construcción se retrasó casi un año. El diámetro de las bolas para enrollar 200 - 400 milímetros, pero puede aumentarlo si lo desea, no requerirá alteraciones especiales. Los hilos utilizados son la costura ordinaria, el pegamento acrílico, la bola de PVC, ya que este pegamento tiene una baja adhesión al PVC. La bola está montada en soportes en cinta de doble cara y una pequeña precarga. En conclusión, un breve video del proceso de la máquina y algunas fotos del trabajo terminado.

 Como escribí anteriormente, se está desarrollando una versión del programa de control a través de Arduino, así como un programa de PC para el control a través de USB. Los recursos de la placa móvil Mars son limitados, por lo que no obtendrá muchos patrones de bobinado, el programa de PC resolverá este problema.Espero que haya inspirado a alguien a crear algo nuevo. Cree, cree, con capacidades modernas: es fácil.
Como escribí anteriormente, se está desarrollando una versión del programa de control a través de Arduino, así como un programa de PC para el control a través de USB. Los recursos de la placa móvil Mars son limitados, por lo que no obtendrá muchos patrones de bobinado, el programa de PC resolverá este problema.Espero que haya inspirado a alguien a crear algo nuevo. Cree, cree, con capacidades modernas: es fácil. Source: https://habr.com/ru/post/es381947/
All Articles