Rescate de ahogamiento - el trabajo de robots
 La robótica moderna hoy se divide, en general, en cuatro categorías principales:
La robótica moderna hoy se divide, en general, en cuatro categorías principales:- robots industriales, estacionarios o en movimiento dentro de las instalaciones,
- robots domésticos (hasta ahora representados principalmente por aspiradoras),
- robots militares
- y robots para el entretenimiento.
Por supuesto, esta división es muy condicional. Pero todas las demás categorías aún se encuentran en un estado de diversos grados de embrión. El uso de robots tiene un gran potencial en muchos campos de actividad. Pero la introducción activa de asistentes mecánicos todavía está limitada por una serie de factores, y principalmente dificultades científicas y técnicas. En este caso, una de las áreas más prometedoras para la robótica es el rescate de personas en áreas de grandes accidentes tecnológicos y desastres naturales. Este tema es cada vez más relevante a lo largo de los años.La idea misma de los robots de rescate, como los robots soldados, no es absolutamente nueva. Y el principal obstáculo aquí no es tanto la complejidad técnica como la algorítmica. No es fácil para las personas encontrar sobrevivientes, pero ¿cómo se les puede enseñar esto a los robots? Por supuesto, esta tarea aún no se les puede asignar completamente. Sin embargo, los robots ya pueden usarse para resolver algunos problemas durante las operaciones de búsqueda y rescate, y pueden hacerlo más rápido y más eficientemente que los humanos.avalancha
En esta situación, el tiempo es un factor crítico. No hay más de 15 minutos para salvar a las personas cubiertas de nieve, hasta que mueran por asfixia. Durante este tiempo, debe encontrar sobrevivientes en un área enorme cubierta con una capa inestable de nieve, lo cual es un peligro para los mismos rescatadores. Ahora los escaladores ya llevan faros individuales con ellos, y también se utilizan señales de teléfonos móviles. Pero aún así esto no permite una búsqueda lo suficientemente rápida.Uno de los intentos de resolver este problema fue la creación del proyecto Sherpa , en cuyo marco se está creando una "plataforma robótica" para las operaciones de búsqueda y rescate en las montañas. Este es un sistema que consta de tres tipos de robots controlados por radio:- , . .
- -, , , , . .
- , -. , . .
Además, se utiliza un contenedor especial para transportar suministros, equipos y drones, que también funciona como cargador. La plataforma Sherpa resulta ser bastante universal, se puede usar no solo para buscar avalanchas.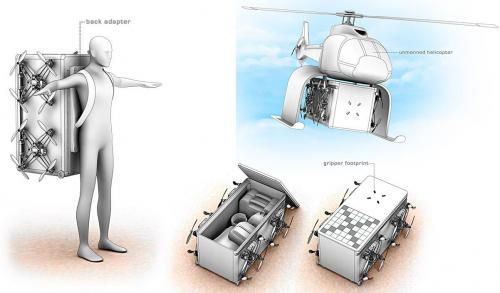
Inundar
En este caso, la tarea de los robots es buscar sobrevivientes en un territorio muy grande y proporcionarles los suministros necesarios para la supervivencia hasta que lleguen los rescatadores. El proyecto de la Universidad Carnegie Mellon de la Universidad Cooperativa de Robótica Acuática propone una solución . Implica el uso de pequeños grupos de pequeños robots planeadores que exploran conjuntamente los cuadrados dados, informan sobre lo encontrado y entregan pequeñas cargas.Los desarrolladores han creado varias opciones de diseño para robots de plástico relativamente baratos equipados con hélices. Para la comunicación, utilizan teléfonos celulares comunes en Android, la orientación se realiza mediante GPS. Los robots también están equipados con una cámara, Arduino y sensores, incluido un sistema para tomar muestras de agua.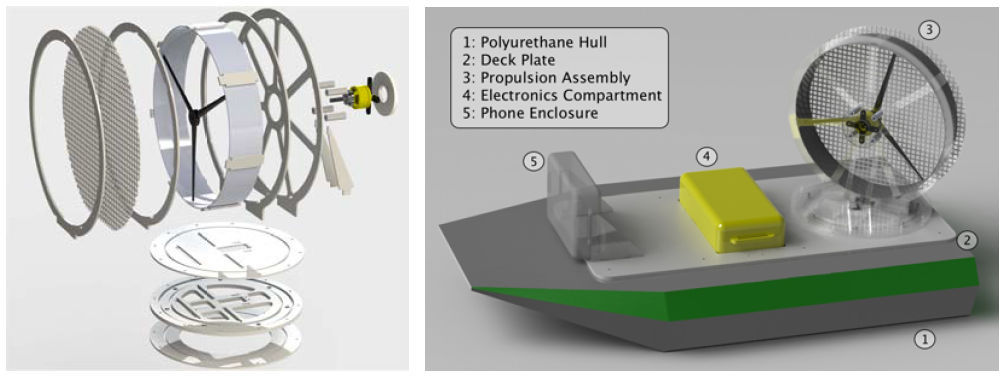
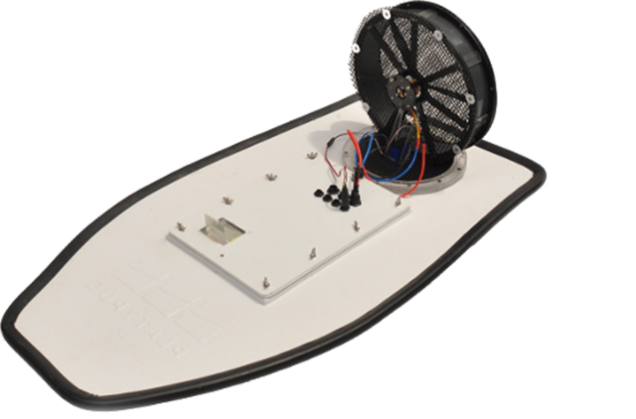 La longitud mínima de la embarcación es de 0.6 m, pero el diseño permite escalar hasta estructuras bastante grandes de varios metros de largo, equipadas con equipos serios, hasta sonar y espectrómetros de masas. Según los desarrolladores, para una búsqueda completa, un robot no debe tener más de 16,000 pies cuadrados. m de superficie de agua (1,6 ha). Naturalmente, aumentar el número de robots por unidad de área acelera la búsqueda y mejora la eficiencia.
La longitud mínima de la embarcación es de 0.6 m, pero el diseño permite escalar hasta estructuras bastante grandes de varios metros de largo, equipadas con equipos serios, hasta sonar y espectrómetros de masas. Según los desarrolladores, para una búsqueda completa, un robot no debe tener más de 16,000 pies cuadrados. m de superficie de agua (1,6 ha). Naturalmente, aumentar el número de robots por unidad de área acelera la búsqueda y mejora la eficiencia.Terremoto
La destrucción del edificio no significa que no haya nadie para salvar en las ruinas. Sin embargo, aquí el factor tiempo es muy importante. Para compilar un mapa de bloqueo y detectar posibles puntos de penetración, los desarrolladores de la Universidad de Ryerson equiparon el multicopter con una cámara RGB-D, capaz no solo de registrar una imagen, sino también de determinar la distancia a los objetos. Una solución similar, en particular, se utilizó en Microsoft Kinect. El sistema analiza imágenes de dos cámaras (color y profundidad) para detectar grietas, caídas, aberturas y agujeros a través de los cuales se puede buscar a los sobrevivientes. Esto tiene en cuenta el tamaño de los agujeros, la profundidad y las condiciones ambientales.Accidentes con emisiones tóxicas y radiactivas
Esta es probablemente el área más desarrollada en robótica de rescate: hay bastantes modelos de robots en el mercado diseñados para estudiar escombros y lugares peligrosos para la salud y la vida humana. Básicamente, son máquinas tan pequeñas que se pueden usar tanto para buscar sobrevivientes debajo de los escombros como para monitorear la radiación y las condiciones químicas en el área del accidente.Y este robot Parosha Cheetah más poderoso se puede utilizar para una variedad de tareas, desde observación y reparación hasta la entrega de medicamentos, suministros y evacuación de personas, ya que la capacidad de carga alcanza los 110 kg.

 De los desarrollos "nuevos", se puede llamar al robot Octopus de 670 kilogramos, equipado con ocho manipuladores (con una capacidad de carga de 180 kg) y utilizado en la central nuclear japonesa de Fukushima. Entre otras cosas, el robot puede equiparse con un láser para cortar piedra y hormigón, así como un agarre especial para trabajar con sustancias radiactivas. En general, Octopus es un robot multipropósito, también adecuado para rescatar sobrevivientes de terremotos, tsunamis e incendios.
De los desarrollos "nuevos", se puede llamar al robot Octopus de 670 kilogramos, equipado con ocho manipuladores (con una capacidad de carga de 180 kg) y utilizado en la central nuclear japonesa de Fukushima. Entre otras cosas, el robot puede equiparse con un láser para cortar piedra y hormigón, así como un agarre especial para trabajar con sustancias radiactivas. En general, Octopus es un robot multipropósito, también adecuado para rescatar sobrevivientes de terremotos, tsunamis e incendios.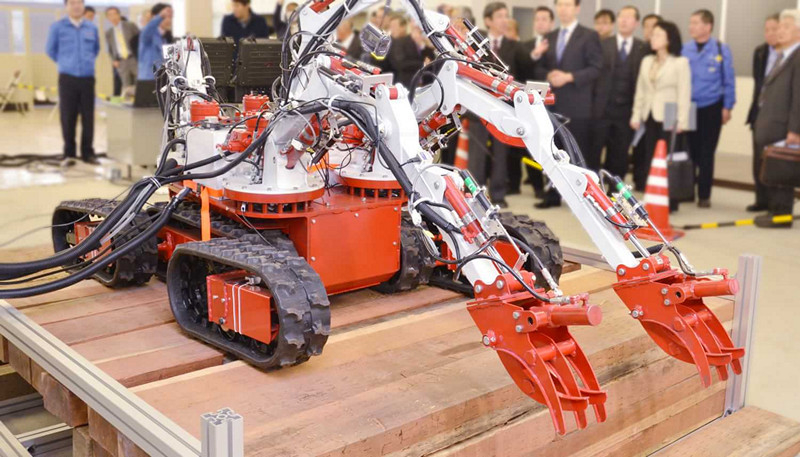 Otro problema que impide el uso generalizado de robots en las operaciones de rescate es la baja confiabilidad de los modelos hechos para uso "civil". Al mismo tiempo, los robots de rescate militares o especializados altamente confiables son muy caros. Y pocas organizaciones deciden invertir varias decenas de miles de dólares en un dispositivo que se vuelve obsoleto o destruido en cuestión de años.Entonces, o bien el desarrollo de la robótica de rescate irá por el camino de la reducción máxima de costos para tomar en cantidad, no calidad, o tendremos que esperar mucho tiempo para la robótica del Ministerio de Emergencias.
Otro problema que impide el uso generalizado de robots en las operaciones de rescate es la baja confiabilidad de los modelos hechos para uso "civil". Al mismo tiempo, los robots de rescate militares o especializados altamente confiables son muy caros. Y pocas organizaciones deciden invertir varias decenas de miles de dólares en un dispositivo que se vuelve obsoleto o destruido en cuestión de años.Entonces, o bien el desarrollo de la robótica de rescate irá por el camino de la reducción máxima de costos para tomar en cantidad, no calidad, o tendremos que esperar mucho tiempo para la robótica del Ministerio de Emergencias.Source: https://habr.com/ru/post/es382073/
All Articles