Quadcopters: ¿cómo empezó todo?
Un moderno helicóptero quadro (hexa, octo) es un dispositivo "informático" bastante potente que se puede controlar desde un teléfono inteligente a través de WiFi, colgar en un punto, volar a lo largo de una ruta, etc. Cualquiera puede comprar ese dispositivo ahora. ¿Cómo comenzó todo?¿Cómo vuela un quadrocopter?
Para comprender la esencia de las soluciones técnicas, entenderemos un poco cómo vuela un quadrocopter. De hecho, un quadrocopter es un sistema inestable. Si toma 4 motores y los conecta a la batería, el quadrocopter no volará a ningún lado, simplemente se volcará. La potencia de tracción de los motores nunca será idéntica. Y entonces la electrónica entra en vigencia. A bordo del quadrocopter hay un "tablero de control" central, cuya parte clave es la unidad del sensor. En el caso más simple, este es un giroscopio de tres ejes. El microcontrolador lee constantemente los datos de los giroscopios, y tan pronto como el giroscopio "detecta" la inclinación a lo largo de cualquier eje, el controlador indica al motor correspondiente que aumente o disminuya ligeramente la velocidad para compensar la inclinación. En general, toda la lógica, con la excepción de un montón de todo (controladores PID, teoría de control, filtros de Kalman),no hay nada complicado (una broma) Bueno, para el usuario todo es realmente transparente. No hay partes móviles, excepto los motores en el quadrocopter, todo el control se lleva a cabo exclusivamente cambiando la rotación de las rotaciones del motor (con giros similares, cambiamos la velocidad de rotación, obtenemos un par). Ahora volvamos a la historia.Precaución, tráfico.Mikrokopter
La legendaria empresa alemana, gracias a los ingenieros de los cuales en 2006 apareció el primer dispositivo. El controlador tenía un procesador Atmega644 a bordo con 4K de memoria y una frecuencia de hasta 20 MHz, 3 giroscopios en cada eje, un acelerómetro (para vuelo horizontal) y un barómetro para mantener la altitud (la precisión del barómetro MPX4115A es de aproximadamente 1 m). Más tarde, aparecieron módulos adicionales, por ejemplo, GPS para mantener una posición.Ahora puedes encontrar un video en youtube sobre cómo voló todo (2007).En general, el sistema tuvo mucho éxito. Sus productos nunca fueron baratos, el precio comenzó en algún lugar desde 1500 euros. La empresa existe ahora, producen dispositivos profesionales, la categoría de precio correspondiente. Y otro punto importante: inicialmente, los creadores de Microcopter abrieron el código fuente. Por supuesto, en el futuro cercano comenzaron a aparecer varios clones (incluidos los realizados en la Federación de Rusia), esto, por supuesto, afectó negativamente las ventas y luego se cerró el código. Pero aún así, creo que esto sirvió como un gran impulso para la creación de un tipo diferente de multicopter.Nosotros MikroKopter no era popular por el precio, y no había tantos propietarios. Sin embargo, se dio un impulso a la comunidad mundial y comenzaron a aparecer varios sistemas.Kaptainkuk
Uno de los sistemas más simples producidos (en varias versiones) desde 2010 hasta el presente. El tablero de control tiene solo 3 giroscopios, las resistencias variables comunes se utilizan para ajustar los parámetros.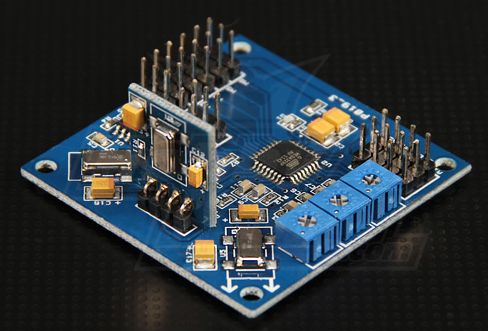 (Foto de Hobbyking.com)Tal tablero ahora cuesta solo alrededor de $ 15, como puede ver, a bordo, además de giroscopios y un procesador débil, en general, no hay nada. El firmware en el código fuente de KK está disponible gratuitamente en Internet, aquellos que lo deseen pueden descargarlo escribiendo el nombre del archivo "kk2_1V1.zip" en la búsqueda de Google (el tamaño es de solo 90Kb). Esta es probablemente la primera y última versión del firmware de un helicóptero, escrita en ensamblador.
(Foto de Hobbyking.com)Tal tablero ahora cuesta solo alrededor de $ 15, como puede ver, a bordo, además de giroscopios y un procesador débil, en general, no hay nada. El firmware en el código fuente de KK está disponible gratuitamente en Internet, aquellos que lo deseen pueden descargarlo escribiendo el nombre del archivo "kk2_1V1.zip" en la búsqueda de Google (el tamaño es de solo 90Kb). Esta es probablemente la primera y última versión del firmware de un helicóptero, escrita en ensamblador.Multiwii
El siguiente hito en el desarrollo de helicópteros fue el sistema MultiWii. El nombre proviene del jugador Nintendo Wii y Wii Nunchuk, que los artesanos desmantelaron, y cortaron una placa con sensores desde allí. El Arduino Nano se utilizó como procesador central.La apariencia del tablero resultó ser algo como esto (foto del sitio web de rcgroups, 2010):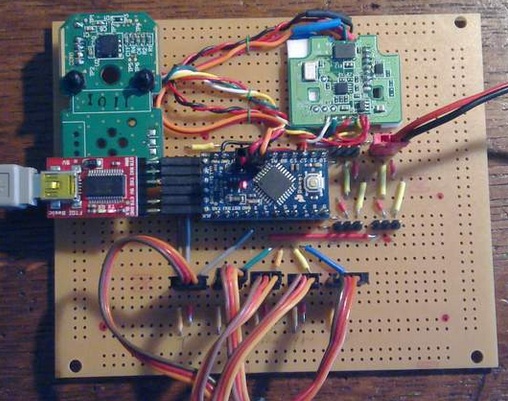 Sin embargo, en unos años el sistema ha evolucionado, y los últimos tableros (se venden ahora, el precio es de $ 20-30) se ven más o menos así:
Sin embargo, en unos años el sistema ha evolucionado, y los últimos tableros (se venden ahora, el precio es de $ 20-30) se ven más o menos así: (foto del sitio Hobbyking.com)Las últimas versiones de MultiWii tienen sensores bastante buenos, pueden colgarse en un punto del GPS, mantener la altitud y regresar a casa. Porque Multiwii fue escrito para Arduino, todas las placas se han mantenido compatibles con Arduino, el código fuente se puede descargar en Github. Uno de los inconvenientes de MultiWii es su procesador débil, que limita las capacidades computacionales de los algoritmos; luego comenzaron a aparecer clones en STM32, pero no hicieron el clima, ya que En términos de hardware, cualquier quadrocopter es bastante simple, el 95% de la complejidad radica precisamente en el código. Al mismo tiempo, estoy seguro de que son las fuentes MultiWii las que se convirtieron en la base de todos los sistemas comerciales actuales.
(foto del sitio Hobbyking.com)Las últimas versiones de MultiWii tienen sensores bastante buenos, pueden colgarse en un punto del GPS, mantener la altitud y regresar a casa. Porque Multiwii fue escrito para Arduino, todas las placas se han mantenido compatibles con Arduino, el código fuente se puede descargar en Github. Uno de los inconvenientes de MultiWii es su procesador débil, que limita las capacidades computacionales de los algoritmos; luego comenzaron a aparecer clones en STM32, pero no hicieron el clima, ya que En términos de hardware, cualquier quadrocopter es bastante simple, el 95% de la complejidad radica precisamente en el código. Al mismo tiempo, estoy seguro de que son las fuentes MultiWii las que se convirtieron en la base de todos los sistemas comerciales actuales.Arducopter
Otro sistema basado en Arduino fue el más alejado. Ahora es un sistema con la posibilidad de vuelo punto a punto programable, soporte para módems de radio y transmisión de telemetría, almacenamiento de varios registros, etc.Su software se ve más o menos así: los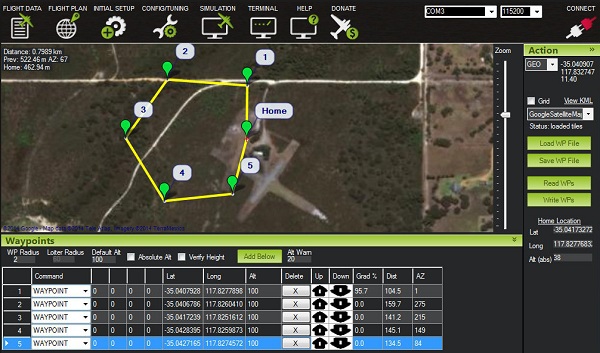 tableros han evolucionado de estos:
tableros han evolucionado de estos: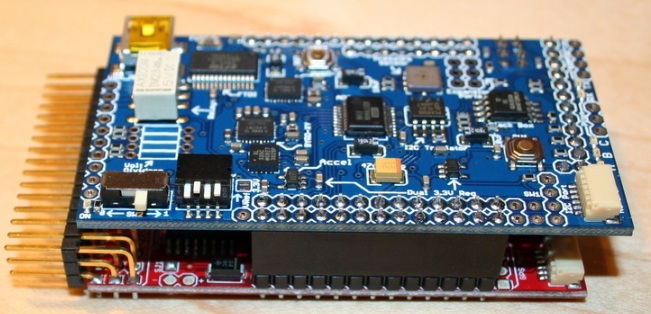 a estos
a estos tableros se venden ahora, el precio es de $ 50 (por clon) a $ 250 para las versiones originales. Los códigos fuente de Ardupilot también están completamente disponibles en github, y a juzgar por la cantidad de confirmaciones, el proyecto se está desarrollando activamente. Este sistema no es inferior en capacidades a los dispositivos profesionales, la calidad del vuelo se puede ver en el video:Aquí todo es genial, excepto un "pero": es de código abierto, con todas las consecuencias resultantes. El sistema está abierto, finalizado por entusiastas, y nadie garantiza nada, incluida la ausencia de errores en el software. Si el quadrocopter cae sobre el BMW de otra persona, no habrá nadie de quien quejarse.
tableros se venden ahora, el precio es de $ 50 (por clon) a $ 250 para las versiones originales. Los códigos fuente de Ardupilot también están completamente disponibles en github, y a juzgar por la cantidad de confirmaciones, el proyecto se está desarrollando activamente. Este sistema no es inferior en capacidades a los dispositivos profesionales, la calidad del vuelo se puede ver en el video:Aquí todo es genial, excepto un "pero": es de código abierto, con todas las consecuencias resultantes. El sistema está abierto, finalizado por entusiastas, y nadie garantiza nada, incluida la ausencia de errores en el software. Si el quadrocopter cae sobre el BMW de otra persona, no habrá nadie de quien quejarse.Cardán sin escobillas
En paralelo con los quadrocopters, se desarrolló otra tecnología muy interesante: cardán sin escobillas para cámara de fotos / video. Esta es una placa separada con sus sensores, que mantiene la cámara en la posición deseada debido a dos motores, compensando los giros en los ejes correspondientes. Fueron desarrollados por nuestro compatriota, cómo funciona la suspensión, se puede ver en el video (año 2013).Se puede ver que el helicóptero está balanceándose, pero el eje de la cámara no.Ahora no es ninguna sorpresa para nadie, y luego fue un gran avance en la calidad de la filmación de videos.Sistemas comerciales
Escribir sobre ellos no es tan interesante, porque El principio aquí es simple, "pagar y volar". El primero fue el mencionado MicroKopter, el siguiente (y no muy exitoso) intento fue XAircraft, los dispositivos Gaui fueron populares en el sector del presupuesto (este fue el primer dispositivo con un precio de alrededor de $ 400 para un helicóptero listo). Y finalmente, la compañía más exitosa es DJI, sobre la cual solo los perezosos no escribieron, por lo que no tiene sentido repetir aquí. Entraron al mercado con los controladores DJI Naza (a un precio de $ 200-400, con la posibilidad de mantener una posición, regresando a casa), había una serie profesional DJI Wookong separada (a un precio de aproximadamente $ 1,000 y una mayor estabilidad de vuelo). Finalmente, DJI ingresó al mercado de dispositivos listos para el vuelo (RTF, Ready To Fly), bueno, todos ya los conocen.Y los últimos videos.El primer quadrocopter de presupuesto Gaui 330. Precio de emisión de $ 400, 2010, sin funciones adicionales.Dji Naza v2, el precio de emisión es el mismo $ 400, la capacidad de mantener una posición, regresar a casa, volar a ambos lados hacia el piloto (modo sin preocupaciones).Dji Phantom 3: con cardán incorporado en la cámara, controles de teléfonos inteligentes y otras cosas.Eso es todo por ahora, perdón por la gran cantidad de videos, pero sin ellos nada, de lo contrario no sería interesante. Veamos que pasa después de 5 años ... Source: https://habr.com/ru/post/es384163/
All Articles