Analizador electrónico de la figura ocho y óvalo de una rueda de bicicleta.
Si montas muchas bicicletas, a veces tienes que repararlas. Una de las fallas que debe enfrentar es el ocho de la rueda, u ovalado.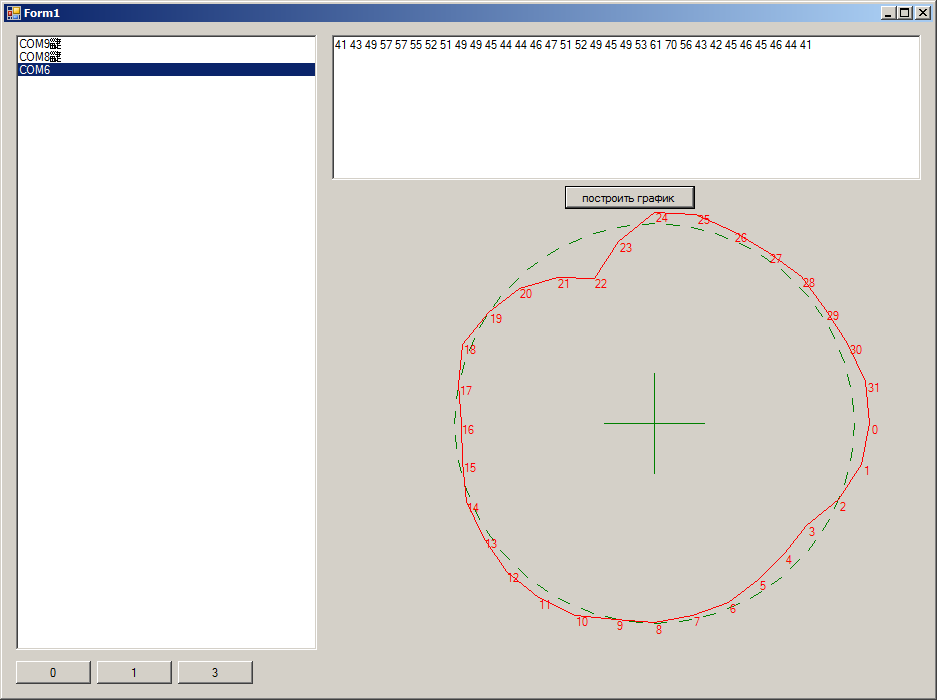 KPDV: los primeros resultados de medir la ovalidad de una ruedaDurante mucho tiempo no pude resolver el problema con mi rueda, así que tuve que armar un sistema de medición electrónico.Primero, una pequeña explicación, ¿cuál es la figura ocho y el óvalo de la rueda?Ocho - desviación de la llanta hacia un lado, como resultado de lo cual la rueda se mueve al conducir:
KPDV: los primeros resultados de medir la ovalidad de una ruedaDurante mucho tiempo no pude resolver el problema con mi rueda, así que tuve que armar un sistema de medición electrónico.Primero, una pequeña explicación, ¿cuál es la figura ocho y el óvalo de la rueda?Ocho - desviación de la llanta hacia un lado, como resultado de lo cual la rueda se mueve al conducir: Oval (o huevo) - cuando la llanta no está a la misma distancia del eje de la rueda, como resultado de lo cual la rueda rebota:
Oval (o huevo) - cuando la llanta no está a la misma distancia del eje de la rueda, como resultado de lo cual la rueda rebota: Y la joroba y el hoyo conducen al óvalo de la rueda.En el caso simple, no es difícil ajustar la rueda con la ayuda de una llave para tejer agujas y un buen ojo. Pero tuve un caso más complicado: tras haber chocado contra un obstáculo en el camino, doblé mucho el borde y lo enderecé a mano, no funcionó sin ayuda adicional, por lo que surgió la idea de ensamblar un dispositivo que pueda medir las desviaciones de la norma.El primer problema que surgió frente a mí fue la elección de un elemento sensible. Es decir, ¿cómo convertir la rugosidad de la rueda en una señal digital correspondiente a la desviación? Se descartaron muchas de las opciones disponibles: el detector de distancia de sonido es sensible a la topografía de la superficie, y debe medir por el borde estrecho de la llanta, el detector de distancia en el diodo IR y el receptor IR me causó temor por las mismas razones (pero existe la posibilidad de que pueda usarse y ellos).Después de pensar un poco, recordé el principio de funcionamiento de un microscopio de exploración: la sonda se mueve a lo largo de la superficie de la muestra y a lo largo de la desviación de la sonda y se mide el alivio. Me gustó la idea, y el esquema más simple se ensambló rápidamente:
Y la joroba y el hoyo conducen al óvalo de la rueda.En el caso simple, no es difícil ajustar la rueda con la ayuda de una llave para tejer agujas y un buen ojo. Pero tuve un caso más complicado: tras haber chocado contra un obstáculo en el camino, doblé mucho el borde y lo enderecé a mano, no funcionó sin ayuda adicional, por lo que surgió la idea de ensamblar un dispositivo que pueda medir las desviaciones de la norma.El primer problema que surgió frente a mí fue la elección de un elemento sensible. Es decir, ¿cómo convertir la rugosidad de la rueda en una señal digital correspondiente a la desviación? Se descartaron muchas de las opciones disponibles: el detector de distancia de sonido es sensible a la topografía de la superficie, y debe medir por el borde estrecho de la llanta, el detector de distancia en el diodo IR y el receptor IR me causó temor por las mismas razones (pero existe la posibilidad de que pueda usarse y ellos).Después de pensar un poco, recordé el principio de funcionamiento de un microscopio de exploración: la sonda se mueve a lo largo de la superficie de la muestra y a lo largo de la desviación de la sonda y se mide el alivio. Me gustó la idea, y el esquema más simple se ensambló rápidamente: : ( , ), , , , , LN2003, ,El algoritmo de medición es el más simple: un motor paso a paso comienza a acercar el botón al borde, tan pronto como se presiona el botón, el paso vuelve a su posición inicial, el número de pasos se transfiere a la computadora, esta acción se repite para cada radio. La precisión resultó ser bastante suficiente: 10 o más pasos por 1 mm, es decir, en principio, puede ajustar la rueda con una precisión de 0.1 mm. Un programa simple convierte los datos enviados por arduino en un programa comprensible, donde puede ver qué rayos girar para solucionar problemas.Después de ajustar completamente mi rueda, la imagen mejoró notablemente:
: ( , ), , , , , LN2003, ,El algoritmo de medición es el más simple: un motor paso a paso comienza a acercar el botón al borde, tan pronto como se presiona el botón, el paso vuelve a su posición inicial, el número de pasos se transfiere a la computadora, esta acción se repite para cada radio. La precisión resultó ser bastante suficiente: 10 o más pasos por 1 mm, es decir, en principio, puede ajustar la rueda con una precisión de 0.1 mm. Un programa simple convierte los datos enviados por arduino en un programa comprensible, donde puede ver qué rayos girar para solucionar problemas.Después de ajustar completamente mi rueda, la imagen mejoró notablemente: el problema desapareció: la rueda dejó de latir al conducir. Pero no fue posible reparar completamente el pozo, hubo una abolladura significativa en el borde después del accidente, es visible en el gráfico anterior:
el problema desapareció: la rueda dejó de latir al conducir. Pero no fue posible reparar completamente el pozo, hubo una abolladura significativa en el borde después del accidente, es visible en el gráfico anterior: La desviación real de la llanta en el punto de indentación es inferior a un milímetro. Fuentes delclienteFuentes de Arduino
La desviación real de la llanta en el punto de indentación es inferior a un milímetro. Fuentes delclienteFuentes de Arduino Source: https://habr.com/ru/post/es384385/
All Articles