 Este año, participamos en el campeonato de lanzamiento de la sonda meteorológica CanSat y establecimos un objetivo ambicioso: convertir la sonda en un UAV completo, cumpliendo con las reglas de la competencia
Este año, participamos en el campeonato de lanzamiento de la sonda meteorológica CanSat y establecimos un objetivo ambicioso: convertir la sonda en un UAV completo, cumpliendo con las reglas de la competenciaEsta publicación incluye:
1) descripción del dispositivo2) propósito de su creación3) proceso de ensamblaje4) pruebas de vuelo5) lanzamiento finalDescripción
El dispositivo es un quadrocopter con dos modos: en pasivo, toma la forma de un cilindro, que se coloca en el cuerpo del cohete, en los rayos activos se abren, se encienden los motores, comienza la misión principal, que consiste en recopilar datos sobre el estado de la superficie y la atmósfera de la tierra, vuelo autónomo de acuerdo con puntos de ajuste (con la capacidad de interceptar el control del piloto) y volver a la base.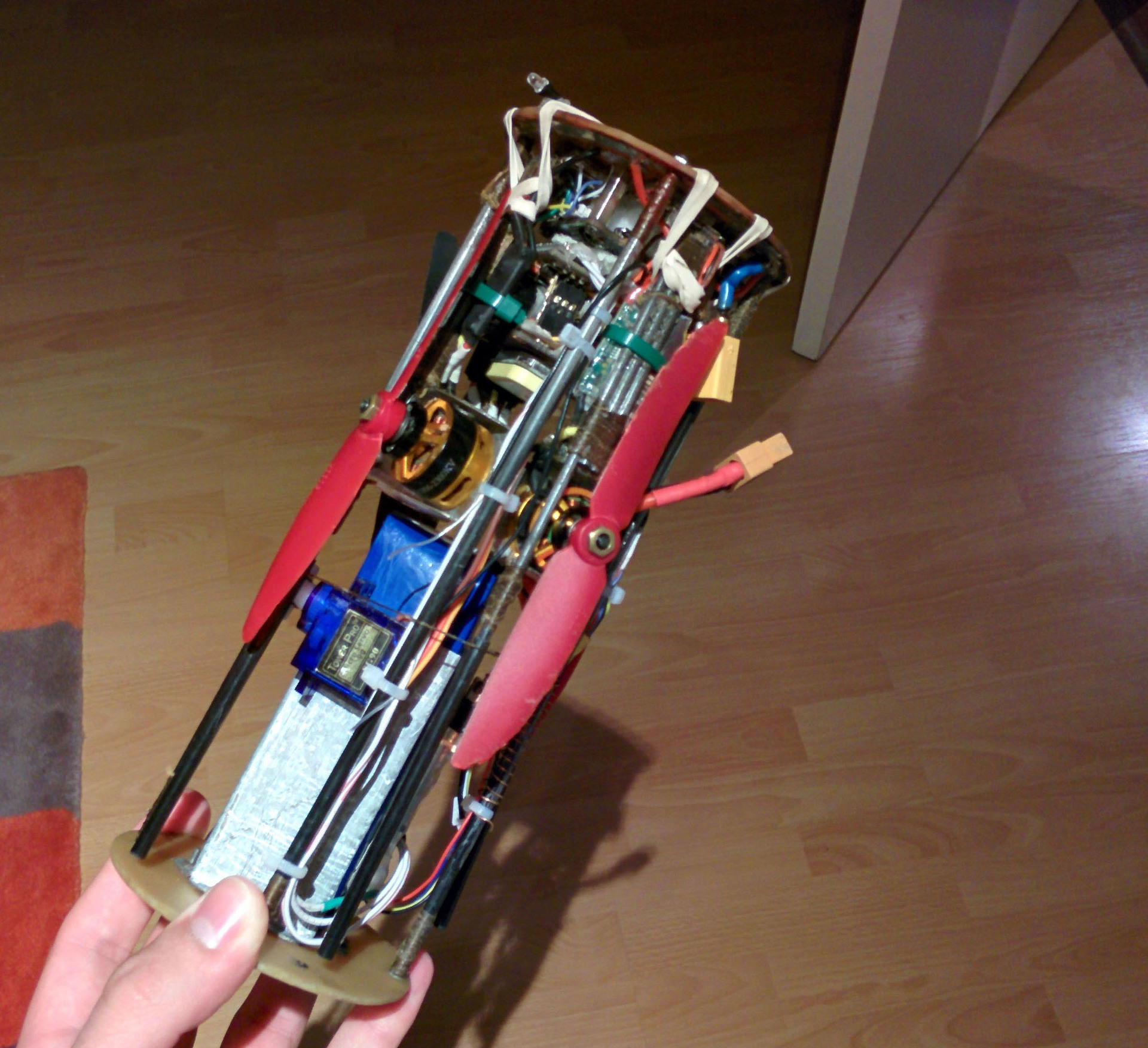 Estado plegado
Estado plegadoCaracterísticas:
Tiempo de vuelo: 6-12 minutosRango de vuelo horizontal: 4 kmRango de vuelo vertical: 2 kmTiempo de transición en modo activo: 3 segundosPeso: 600 gSensores instalados: barómetro, acelerómetro, giroscopio, magnetómetro, GPS, cámara infrarrojaEl proyecto fue creado para participar en la liga principal del campeonato CanSat, que lleva a cabo SINP MSU.¿Qué es el kansat?, . («»), , .
— , 1-4 , , . .
, , . , , . .
3 :
— 0.5 , 350 , , , , ATmega 128, RXQ2 (433 ). 500.
— , . : 200, . 1 .
— (30 ) .
Mi equipo tenía experiencia participando en el campeonato: el año pasado estábamos en la liga regular. En lugar de un diseñador listo para usar, se decidió hacer el suyo propio, conservando los componentes principales del conjunto básico, de modo que las reglas no se violaran realmente, pero notificamos a los organizadores. Logramos reducir el tamaño del tablero en 3 veces debido al uso de la impresión a doble cara, por lo que teóricamente podríamos participar en el campeonato estadounidense, pero debido a la producción local, el tablero funcionó con algunas interrupciones, lo que no nos permitió lanzarnos en un cohete.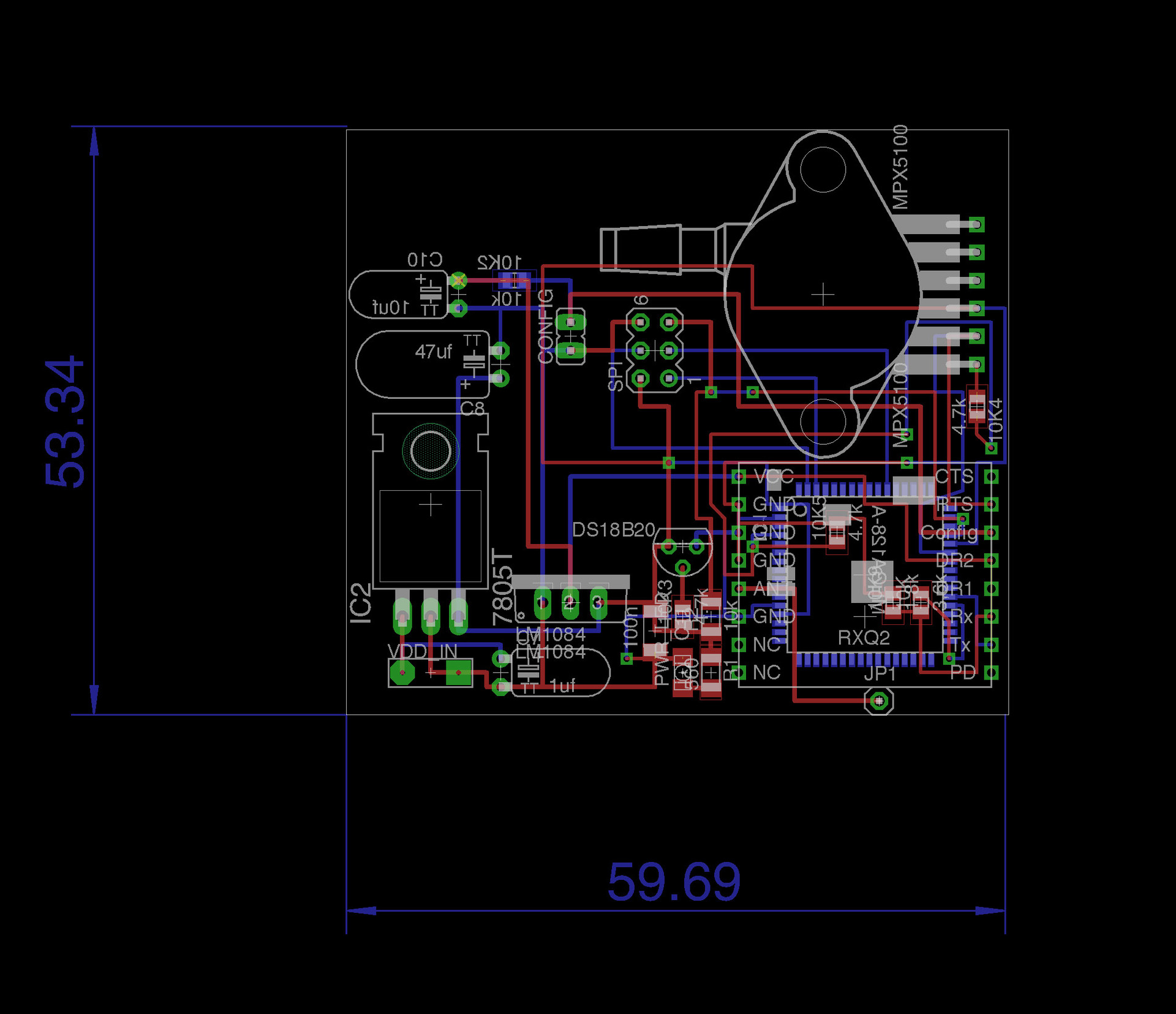 Placa de circuito principalNuestra misión adicional era disparar a la Tierra en el rango infrarrojo con una cámara de 16x4 píxeles y el rango visible con más superposición. Como ha demostrado la práctica, el proyecto fue inútil de una forma u otra, ya que la sonda se balanceaba constantemente debido a la caída del paracaídas, había una falta de velocidad de apertura y velocidad de disparo, por lo que todos los videos estaban borrosos.
Placa de circuito principalNuestra misión adicional era disparar a la Tierra en el rango infrarrojo con una cámara de 16x4 píxeles y el rango visible con más superposición. Como ha demostrado la práctica, el proyecto fue inútil de una forma u otra, ya que la sonda se balanceaba constantemente debido a la caída del paracaídas, había una falta de velocidad de apertura y velocidad de disparo, por lo que todos los videos estaban borrosos.ejemplo de tal video
( 0:35)
. 2-
Más detalles sobre cómo todos rompimos1) - , .
2) , - , . , .
3) 18 / .
4) , , .
, 4 , .
También vale la pena mencionar al equipo más viejo, que participó en un campeonato incluso anterior. El año pasado participaron en la liga mayor. La característica principal es el uso de un impulsor en lugar de un paracaídas, pero debido a la falta de disponibilidad del código del programa y una placa improvisada, tampoco pudieron funcionar.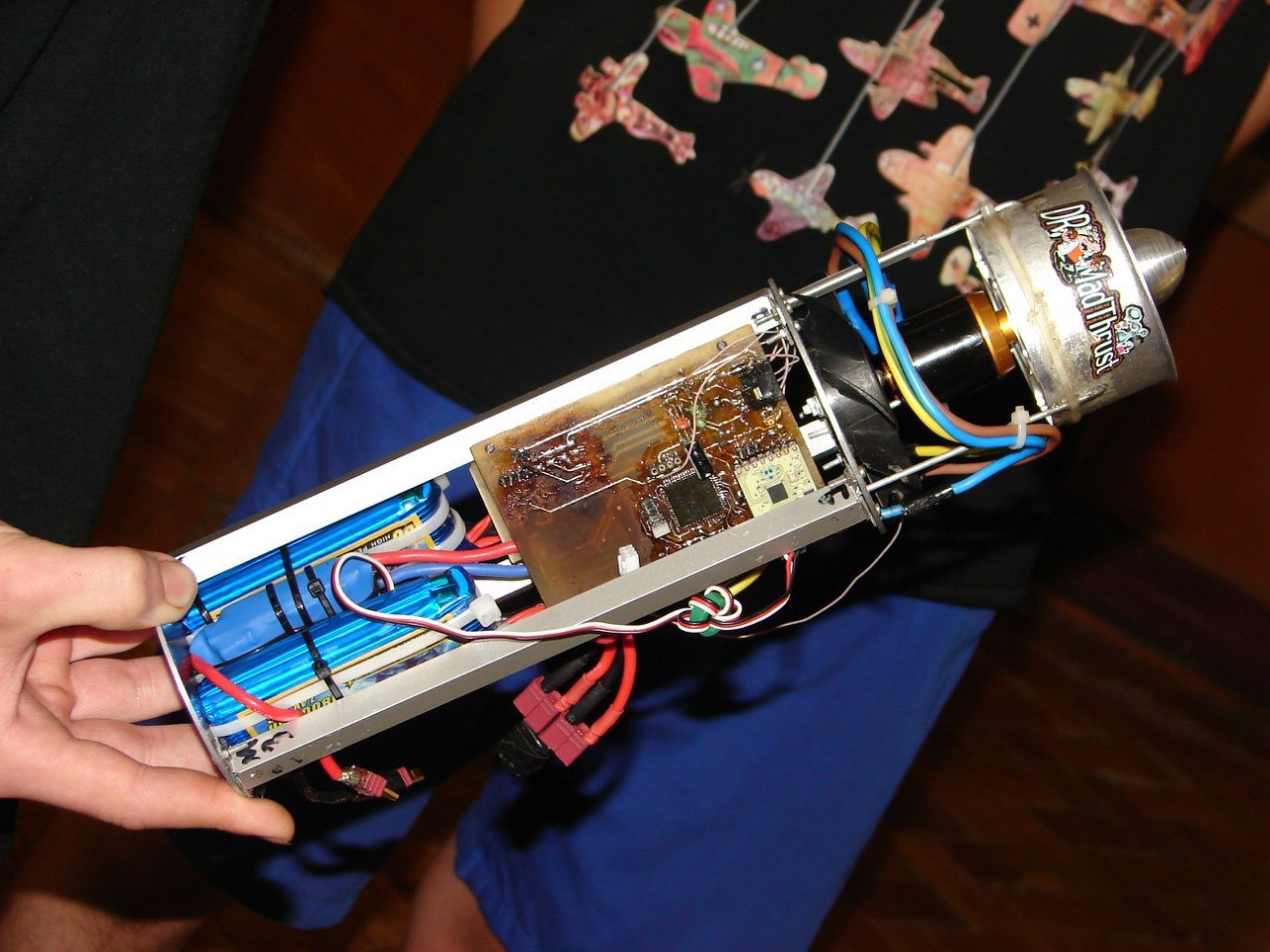 sonda de impulsor
sonda de impulsorSu historia
, , . , GPS GSM .
. , .
, , .
Este año se decidió fusionar el equipo. Como resultado, mi equipo decidió desarrollar la idea de un descenso controlado, es decir, crear un quadrocopter que encajara en un cohete.Proceso de creación
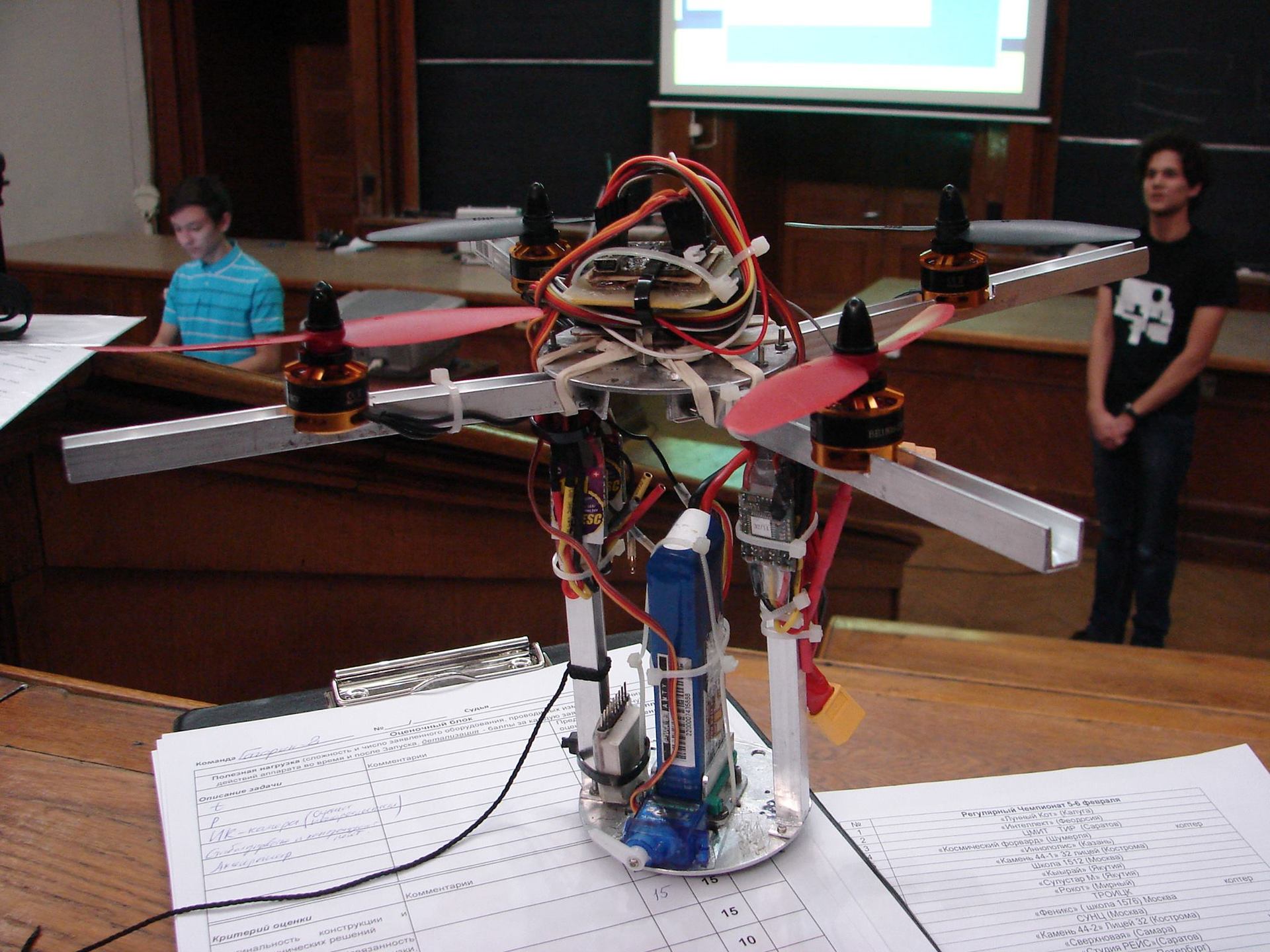 prototipoEl primer prototipo que hicimos una semana antes de la sesión de invierno para convencer al jurado de la realidad de este proyecto. El marco estaba hecho de aluminio, vigas también. Como controlador de vuelo, utilicé MultiWii, por lo que este prototipo solo podía revelar los rayos a las órdenes del operador y volar en modo manual.
prototipoEl primer prototipo que hicimos una semana antes de la sesión de invierno para convencer al jurado de la realidad de este proyecto. El marco estaba hecho de aluminio, vigas también. Como controlador de vuelo, utilicé MultiWii, por lo que este prototipo solo podía revelar los rayos a las órdenes del operador y volar en modo manual.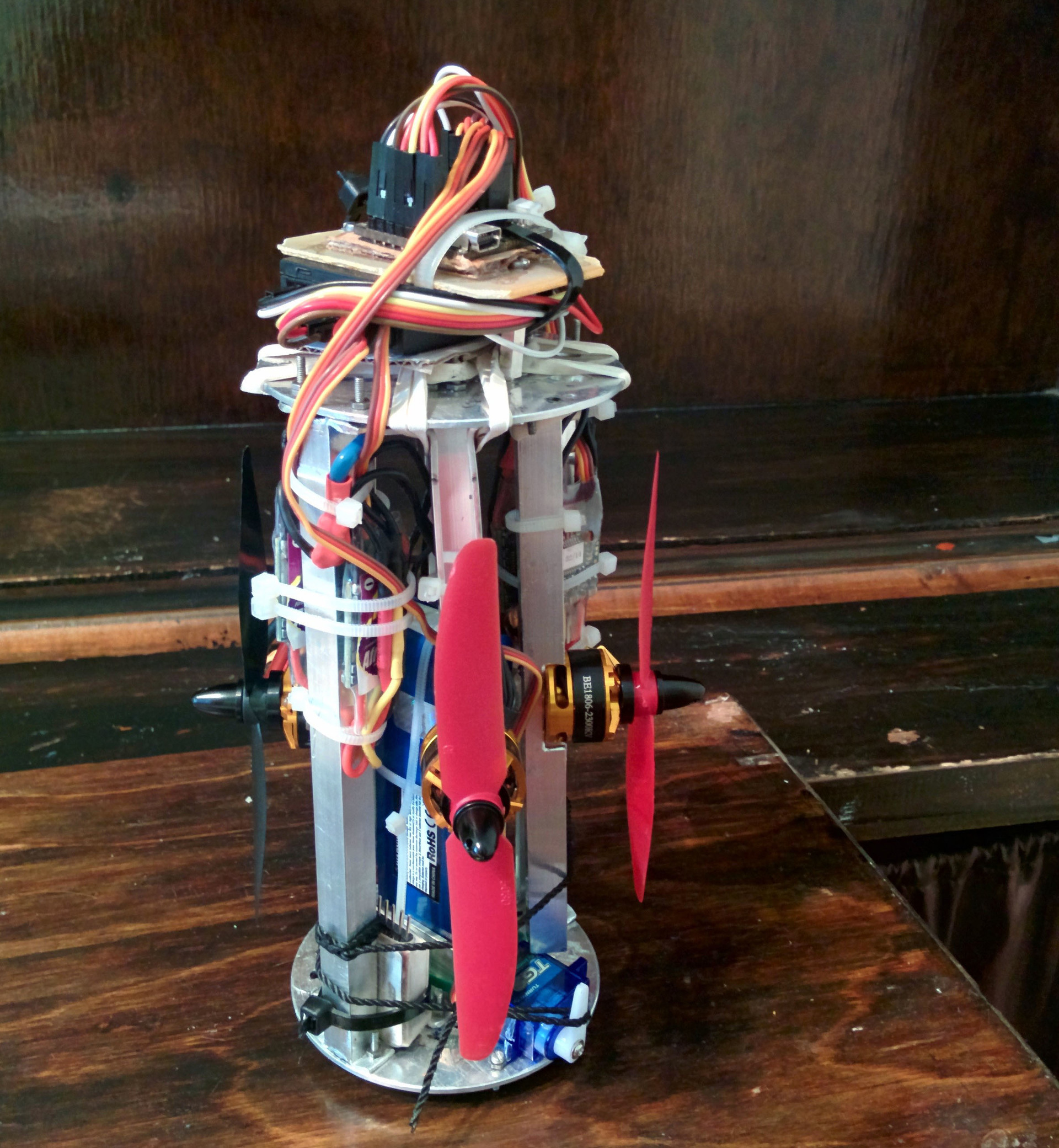 El jurado apreció el proyecto, tomamos el primer lugar y ahora podríamos comenzar a armar. Por cierto, justo antes de la presentación durante el vuelo de prueba, nuestro motor se quemó, lo cambiamos por uno de repuesto. Durante la presentación, el motor se quemó nuevamente. Ambos estaban conectados al mismo controlador de velocidad, ya no lo usamos.Desafortunadamente, la fuente de financiación desapareció, parecía estar más cerca de aprobar el examen, aquí no pude participar. Como resultado, después de aprobar los exámenes, pedimos urgentemente las piezas necesarias por entrega urgente y, armados con tubos de carbono, hilos de Kevlar y epoxi, comenzamos a ensamblar el marco y las vigas. En el transcurso de las dos semanas, la idea de que no teníamos tiempo no me dejó, pero los boletos de tren fueron comprados, no hubo vuelta atrás.
El jurado apreció el proyecto, tomamos el primer lugar y ahora podríamos comenzar a armar. Por cierto, justo antes de la presentación durante el vuelo de prueba, nuestro motor se quemó, lo cambiamos por uno de repuesto. Durante la presentación, el motor se quemó nuevamente. Ambos estaban conectados al mismo controlador de velocidad, ya no lo usamos.Desafortunadamente, la fuente de financiación desapareció, parecía estar más cerca de aprobar el examen, aquí no pude participar. Como resultado, después de aprobar los exámenes, pedimos urgentemente las piezas necesarias por entrega urgente y, armados con tubos de carbono, hilos de Kevlar y epoxi, comenzamos a ensamblar el marco y las vigas. En el transcurso de las dos semanas, la idea de que no teníamos tiempo no me dejó, pero los boletos de tren fueron comprados, no hubo vuelta atrás.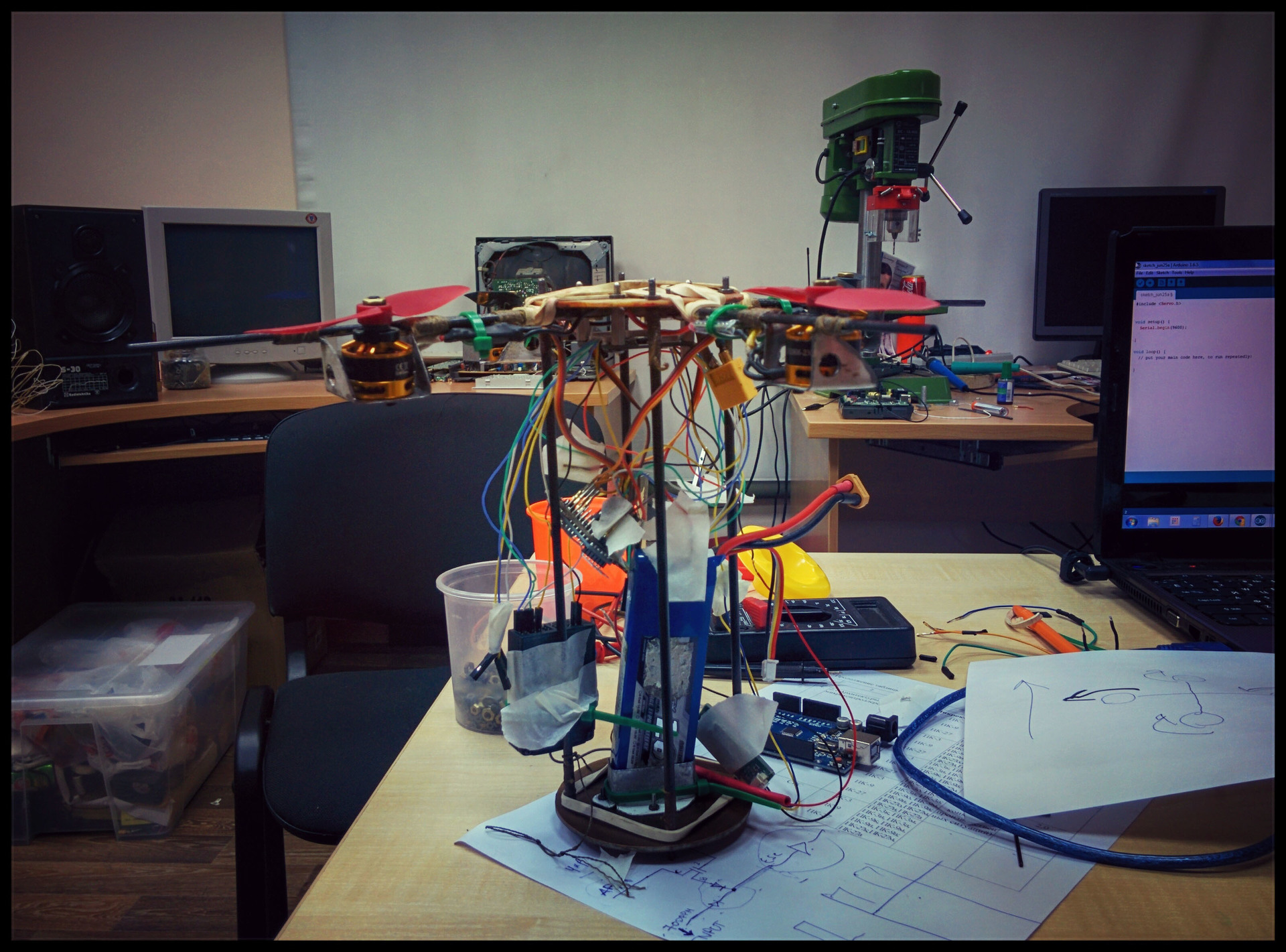 versión final de depuraciónNo tuvimos que hablar de pruebas de vuelo serias, solo teníamos un modelo de trabajo, su pérdida significaba un fracaso.El primer lanzamiento fue dentro del edificio, fue exitoso, el segundo lanzamiento en la calle en modo manual fue exitoso, el tercer lanzamiento en modo de espera gps fue casi fatal. Debido a un magnetómetro mal ajustado, la sonda dejó de obedecer las órdenes y voló hacia el lago más cercano, ya que la pared del albergue lo detuvo. Perdimos 2 haces y 2 hélices, el armazón sobrevivió. Teníamos vigas de repuesto, por lo que el rendimiento se restableció en un par de horas. Después de una larga configuración del magnetómetro, hubo otro intento: el lanzamiento fue exitoso.Quedaba por comprobar el regreso a la base. Este día fue justo en mi graduación, pero no había nada que hacer, fuimos al campo, intentamos regresar a casa, con éxito. No había límite para la alegría, al día siguiente fuimos a Moscú para los lanzamientos, pero el código de divulgación automática aún no estaba escrito y, al parecer, repetimos el error del año pasado.prueba volver a la baseTe contaré más sobre el sistema de divulgación automática.Consiste en un servoaccionamiento, cuerda, gomas, tablero de control y fotodetector.
versión final de depuraciónNo tuvimos que hablar de pruebas de vuelo serias, solo teníamos un modelo de trabajo, su pérdida significaba un fracaso.El primer lanzamiento fue dentro del edificio, fue exitoso, el segundo lanzamiento en la calle en modo manual fue exitoso, el tercer lanzamiento en modo de espera gps fue casi fatal. Debido a un magnetómetro mal ajustado, la sonda dejó de obedecer las órdenes y voló hacia el lago más cercano, ya que la pared del albergue lo detuvo. Perdimos 2 haces y 2 hélices, el armazón sobrevivió. Teníamos vigas de repuesto, por lo que el rendimiento se restableció en un par de horas. Después de una larga configuración del magnetómetro, hubo otro intento: el lanzamiento fue exitoso.Quedaba por comprobar el regreso a la base. Este día fue justo en mi graduación, pero no había nada que hacer, fuimos al campo, intentamos regresar a casa, con éxito. No había límite para la alegría, al día siguiente fuimos a Moscú para los lanzamientos, pero el código de divulgación automática aún no estaba escrito y, al parecer, repetimos el error del año pasado.prueba volver a la baseTe contaré más sobre el sistema de divulgación automática.Consiste en un servoaccionamiento, cuerda, gomas, tablero de control y fotodetector. La sonda está sumergida en un cohete, está oscuro allí, usando el fotodetector MK, esto soluciona, el sistema entra en modo de espera. El cohete comienza, la separación, el flujo de luz aumenta, el servo libera la cuerda que sostiene los rayos (su estado normal se debe a las bandas de goma abiertas), los rayos se abren, después de 3 segundos, la placa da acceso al microcontrolador de vuelo a bordo a los controladores de velocidad, comienza el vuelo al primer punto, Más vuelo a casa.La junta de gestión de divulgación también controla la cámara IR. Después de transferir el procesamiento de datos sin procesar del sensor a la computadora, la frecuencia aumentó de 18 fps a 30 fps (los datos se registran en microSD). Tuvimos que trabajar duro para controlar los motores: primero no puede desconectar la conexión entre el MK y los controladores de velocidad, y luego restaurar, no se iniciarán. Primero debe dar una señal para inicializar y solo luego dar acceso al vuelo MK. Por lo tanto, tuve que crear un esquema con la capacidad de acceder a los reguladores tanto desde el micrón de vuelo como desde el administrador.Continuamos sin problemas a la etapa final:
La sonda está sumergida en un cohete, está oscuro allí, usando el fotodetector MK, esto soluciona, el sistema entra en modo de espera. El cohete comienza, la separación, el flujo de luz aumenta, el servo libera la cuerda que sostiene los rayos (su estado normal se debe a las bandas de goma abiertas), los rayos se abren, después de 3 segundos, la placa da acceso al microcontrolador de vuelo a bordo a los controladores de velocidad, comienza el vuelo al primer punto, Más vuelo a casa.La junta de gestión de divulgación también controla la cámara IR. Después de transferir el procesamiento de datos sin procesar del sensor a la computadora, la frecuencia aumentó de 18 fps a 30 fps (los datos se registran en microSD). Tuvimos que trabajar duro para controlar los motores: primero no puede desconectar la conexión entre el MK y los controladores de velocidad, y luego restaurar, no se iniciarán. Primero debe dar una señal para inicializar y solo luego dar acceso al vuelo MK. Por lo tanto, tuve que crear un esquema con la capacidad de acceder a los reguladores tanto desde el micrón de vuelo como desde el administrador.Continuamos sin problemas a la etapa final:lanzamientos
Y parece que la noche antes de los lanzamientos, todo está listo, incluso probamos el vuelo por puntos, realmente vuela, pero nadie pensó en hacer una simulación completa. Como resultado, el autobús que nos llevó al campo de lanzamiento reveló que el código no funcionaba correctamente; Invité a un amigo a comentar sobre el ciclo principal en el que el trabajo de todos los sistemas adicionales comienza a determinar la raíz del problema. Intentamos corregir el error durante el tiempo restante antes de los lanzamientos, les pedimos a los organizadores que nos permitieran durar. Finalmente, el problema se resolvió, pero, como resultó, mi amigo, en lugar de comentar el ciclo, estableció un retorno de "depuración", que nadie se molestó en eliminar.El cohete, como sucedió, no pudo elevar la sonda por el kilómetro declarado, solo 500 metros al día siguiente, por lo que decidimos lanzarnos en el hexacóptero. Para simular la ubicación de la sonda en el cohete, colocamos una tapa en el fotodetector, y su otro extremo estaba atado a un hexacóptero.Y así, el hexacóptero se eleva con nuestra sonda oscilante, convirtiéndose lentamente en un lugar indistinguible; La sonda fue lanzada por FPV por kilómetro, pero debido a la baja resolución no estaba claro si se produjo la divulgación, alguien incluso dijo que no se abrió y cayó con una piedra (inicialmente tuvo que volar en los puntos dados, y luego volver a lugar de inicio, pero incluso después de 5 minutos de espera nadie lo vio). Por supuesto, estábamos molestos y fuimos a buscar sus restos en el campo, pero, mirando los últimos datos de telemetría, notamos que, aunque la conexión con la sonda había desaparecido, las últimas coordenadas indican un campo vecino de la pastinaca de vaca. Vamos a lo largo de las coordenadas; En el camino, otro equipo dijo que lo había visto sentarse en los arbustos; comenzaron las búsquedas. Al final resultó que, es extremadamente difícil encontrar una pequeña sonda en la hierba incluso sabiendo sus coordenadas.Al final, decidí encender los motores para colocar una batería supuestamente descargada, luego tuve que limpiar el voltímetro incorporado. El plan funcionó, lo encontramos sano y salvo, incluso las hélices no sufrieron, gracias a los rayos alargados. Los alegres se fueron a casa para procesar los datos, o más bien, su ausencia, gracias al retorno de "depuración".Es cierto que teníamos datos del controlador de vuelo y los analizamos. Obtuve una trayectoria, un gráfico de alturas y errores del sistema.
Los alegres se fueron a casa para procesar los datos, o más bien, su ausencia, gracias al retorno de "depuración".Es cierto que teníamos datos del controlador de vuelo y los analizamos. Obtuve una trayectoria, un gráfico de alturas y errores del sistema.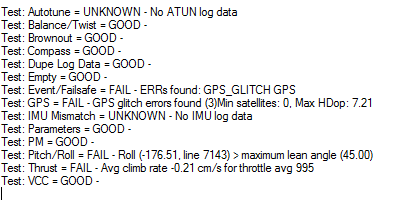
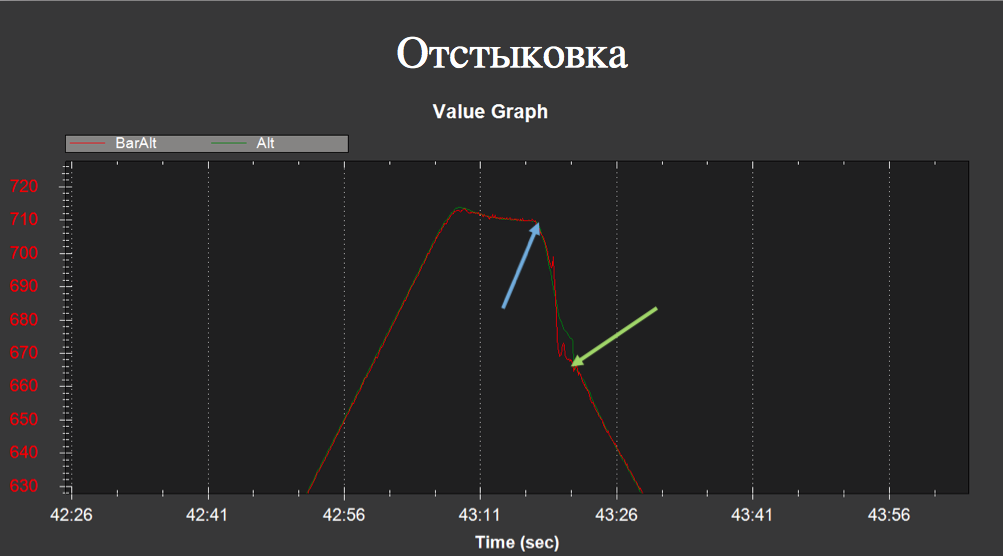 flecha azul: el momento de encender los motores; flecha verde: el momento de inclusión del modo de regresar a casa.También recibimos un registro del hexacóptero.El resultado es que se separó con éxito, soltó los rayos, encendió los motores, pudo nivelarse desde una posición invertida y voló al punto más cercano.
flecha azul: el momento de encender los motores; flecha verde: el momento de inclusión del modo de regresar a casa.También recibimos un registro del hexacóptero.El resultado es que se separó con éxito, soltó los rayos, encendió los motores, pudo nivelarse desde una posición invertida y voló al punto más cercano.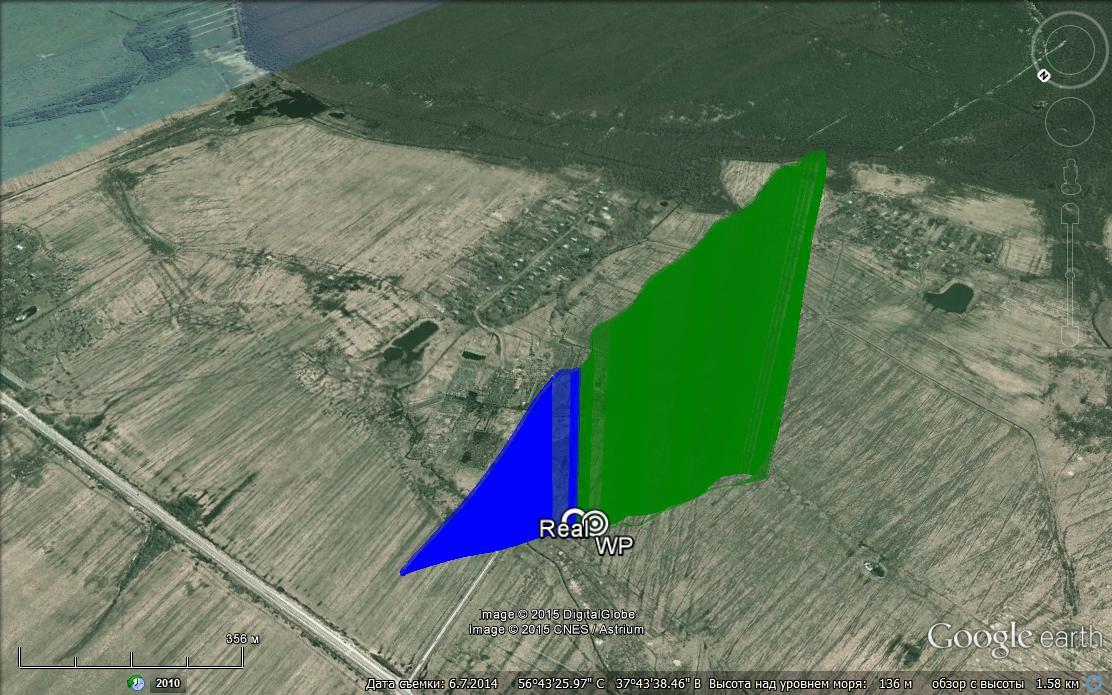 Luego hubo una pérdida de comunicación con la estación base, este es exactamente el momento que no tomé en cuenta. En la configuración predeterminada, se le ordenó interrumpir el vuelo por puntos y volar a casa, por lo que dejó de descender y se preparó para la base, pero allí estaba, encendimos los motores demasiado rápido, antes de que tuviéramos tiempo de "calentar" el GPS, por lo que no recordaba esas coordenadas. , No grabé correctamente el punto de la casa (aunque es una pregunta por qué se encuentra en una línea recta a lo largo de su camino). Luego hizo un aterrizaje suave en modo automático y apagó los motores.
Luego hubo una pérdida de comunicación con la estación base, este es exactamente el momento que no tomé en cuenta. En la configuración predeterminada, se le ordenó interrumpir el vuelo por puntos y volar a casa, por lo que dejó de descender y se preparó para la base, pero allí estaba, encendimos los motores demasiado rápido, antes de que tuviéramos tiempo de "calentar" el GPS, por lo que no recordaba esas coordenadas. , No grabé correctamente el punto de la casa (aunque es una pregunta por qué se encuentra en una línea recta a lo largo de su camino). Luego hizo un aterrizaje suave en modo automático y apagó los motores.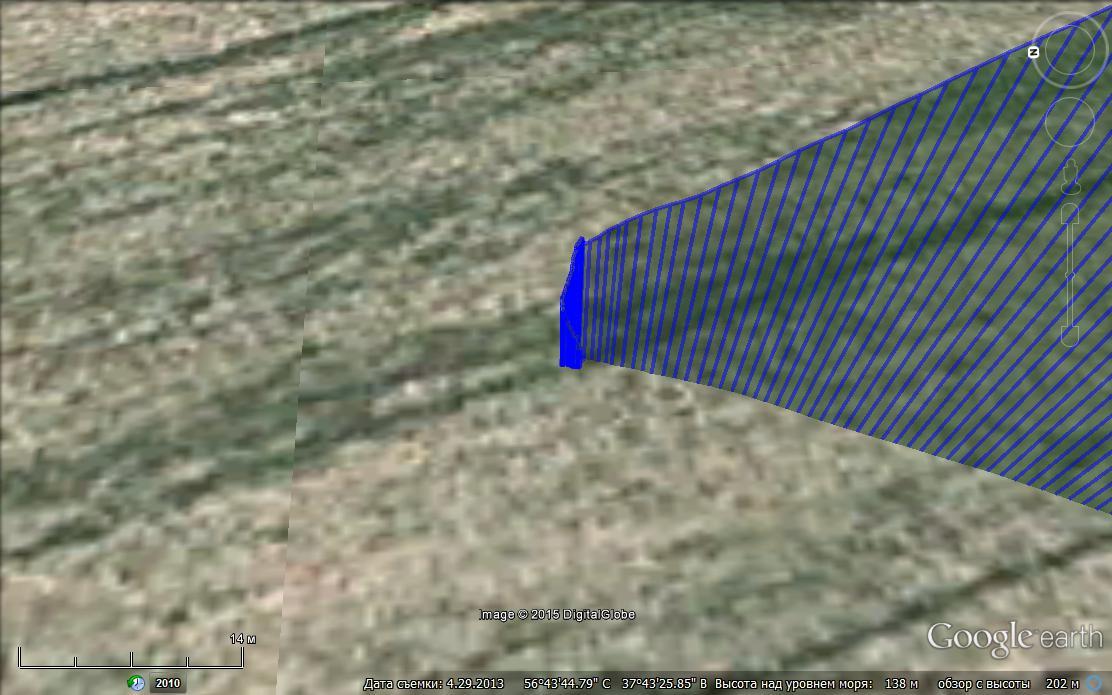 Después de tantos errores, no esperábamos tomar el primer lugar, pero el jurado pareció apreciar la idea. Entonces ganamos el cuarto campeonato CanSat en Rusia.
Después de tantos errores, no esperábamos tomar el primer lugar, pero el jurado pareció apreciar la idea. Entonces ganamos el cuarto campeonato CanSat en Rusia.PD
Nunca encontré un solo proyecto de trabajo sobre el descenso controlado de la sonda CanSat, tal vez somos los primeros, esto es incluso extraño, ya que todo fue relativamente simple.Referencias
Aquí puede leer sobre el kansat del año pasado.Sitio web oficial, si desea participar,el sitio de firmware que utilizamos para el vuelo autónomoEpílogo?
- , , . , .
?
, , , .
?
300$ 500$, . , , , . , .
GPS ?
( ).